

主动前轮转向系统(active front steering,AFS)是先进的汽车转向技术,通过动态调整前轮的转角来改善车辆的操控性和稳定性[4],为ABS的优化提供了新的研究方向. ABS与AFS控制的协调工作[5]是智能汽车安全控制系统中的重要一环. 倪铭等[6]提出新型控制器,将滑模控制与模糊自适应比例-积分-微分(proportional-integral-derivative, PID)相结合,并应用于AFS、ABS的协调控制中. 虽然该方法在确保制动效果的同时能够显著提升车辆的转向稳定性和控制性能,但是它的参数依赖性强,难以应对多工况下的动态变化. Zhang等[7]提出基于分布模型预测控制的AFS和ABS综合协调控制方法. 该方法使汽车的纵向速度、横向速度和侧偏角更贴合理想值,提高了车辆的制动安全性和操纵稳定性但存在计算负担大、实时性差的问题.
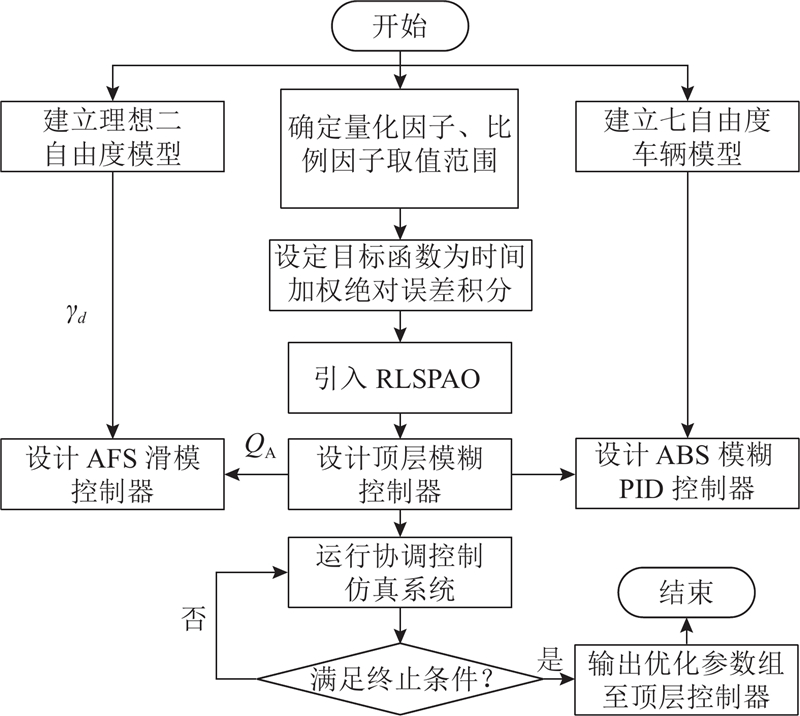
本研究提出AFS与ABS的协调控制方法,构建基于模糊规则的顶层控制器用于实现动态权重调节,引入结合动态反向学习和基于停滞检测的扰动策略的天鹰优化算法(reverse learning and stagnation perturbation strategy for Aquila optimization algorithm,RLSPAO)对模糊控制器关键参数进行离线整定优化,得到RLSPAO-顶层控制器,使AFS和ABS协调工作的权重分配更合理,有效减少车辆的横向偏移和制动距离,进一步提升汽车在复杂工况制动的稳定性和安全性.
1. 建立车辆动力学模型
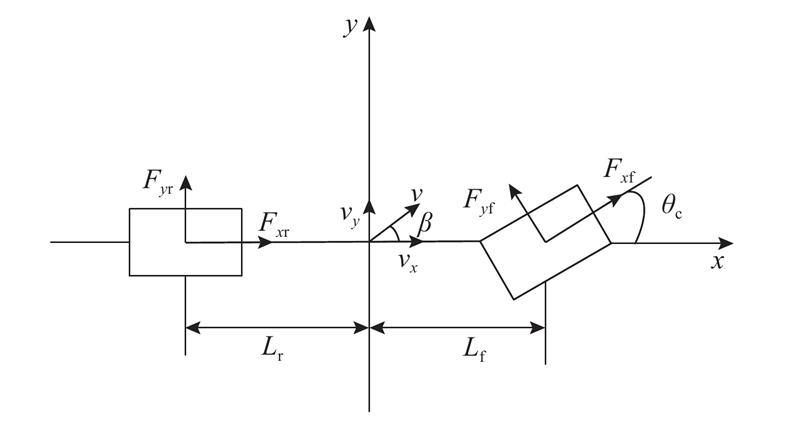
1.1. 二自由度车辆模型
图 1
令
式中:L为轴距,kf、kr为前后轮侧偏刚度,m为整车质量,Lf、Lr为前后轴到质心的距离,vx为车辆纵向速度;Iz为绕z轴的转动惯量.
1.2. 七自由度车辆模型
图 2
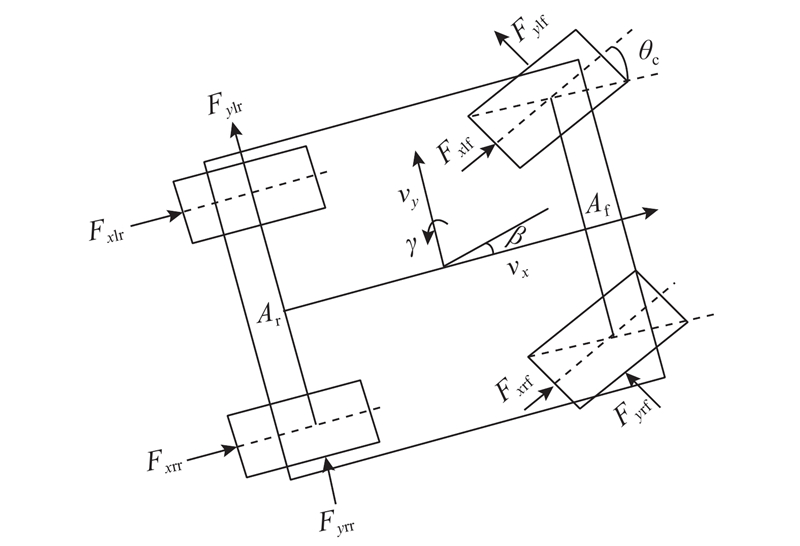
式中:vy为车辆横向速度,Fxlf、Fxrf、Fxlr、Fxrr分别为左前轮、右前轮、左后轮及右后轮的纵向力,Fylf、Fyrf、Fylr、Fyrr分别为左前轮、右前轮、左后轮及右后轮的横向力,Af为前轮轮距,Ar为后轮轮距. 各轮胎的垂直载荷为
式中:Fzlf、Fzrf、Fzlr和Fzrr分别为左前轮、右前轮、左后轮及右后轮的垂直载荷,h为质心高度,g为重力加速度. 车轮运动方程:
式中:i∈{lf、rf、lr、rr},Si为实际滑移率,r为轮胎半径,I为车轮转动惯量,
1.3. 制动系统模型
车辆的液压制动系统是主动制动器,能根据不同需求调节制动力的大小. 液压ABS通过调节轮缸压力控制传递到车轮的制动力矩,确保制动的安全可靠性,动态调节制动压力实现增压保压和减压,数学模型为
式中:J1和J2为液压制动机构相关参数;pm为主缸压力;pw为轮缸压力;B1和B2为增压阀和减压阀开关状态,其中开为1,关为0;pr为蓄能器压力;d1和d2为节流阀指数. 液压制动系统涉及压力传递的动态响应、电磁阀控制特性以及液压管路的流体力学效应. 在建模过程中,通常忽略液压系统中压力传输的滞后效应以及电磁阀弹簧刚度的非线性影响[10],将系统简化为一阶惯性系统的电磁阀和积分环节组成的数学模型,传递函数描述为
式中:tr为电磁阀的响应时间,K为比例系数. 制动器模型用于描述液压传动系统中液压力与制动力矩之间的映射关系[11]. 在建模过程中,为了简化分析,忽略外部因素(如环境、热衰退)影响,将制动器假设为理想执行元件,即其能够提供理论制动力矩. 基于这一假设,
式中:Tb为施加于车轮上的制动力矩;Kq为制动器的控制增益,表征输入与实际输出制动力之间的放大关系.
2. 协调控制算法的系统结构
图 3
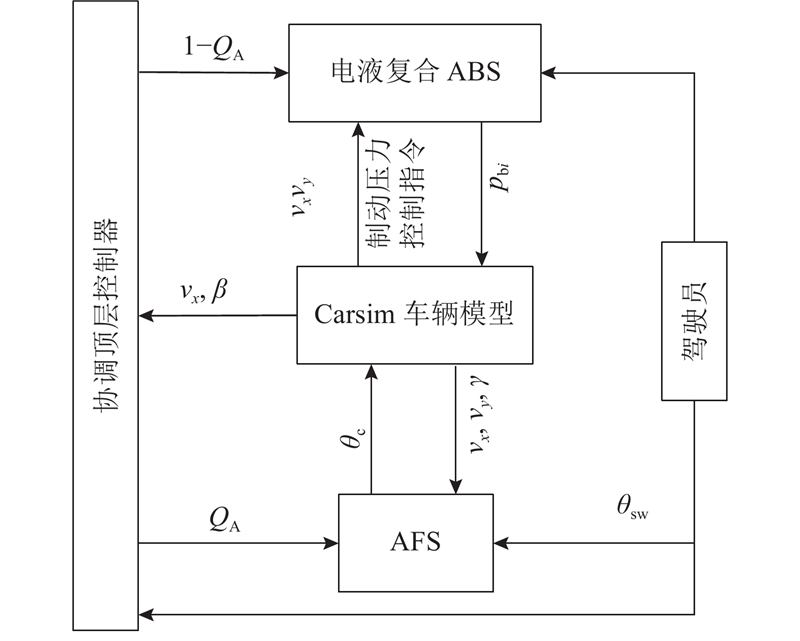
图 4
3. 防抱死制动系统和主动前轮转向控制器设计
3.1. 防抱死制动系统模糊PID控制器设计
PID控制规律为
在控制过程中,根据误差e及其变化率
图 5
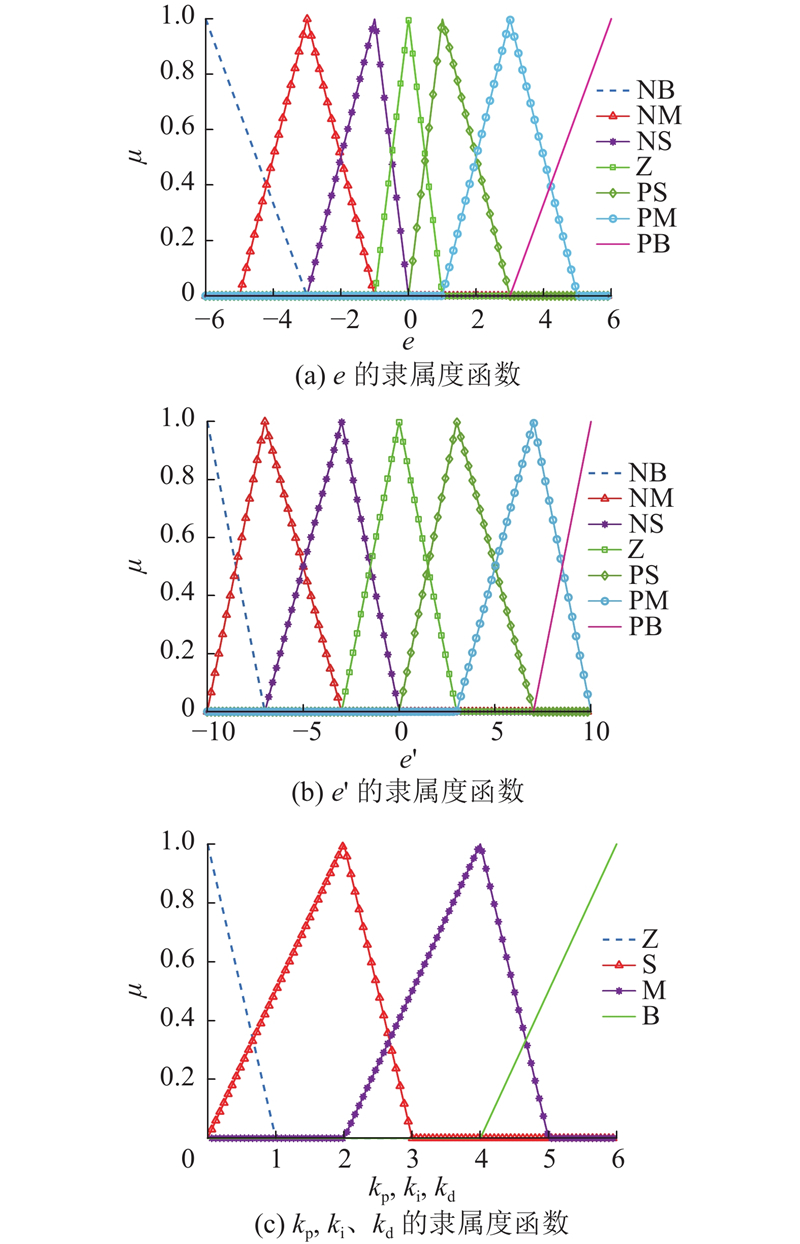
图 5 模糊PID控制器输入输出的隶属度函数
Fig.5 Input and output membership functions of fuzzy PID controller
表 1 模糊PID控制器的模糊控制规则表
Tab.1
| e | |||||||
| NB | B,Z,S | B,Z,M | B,Z,B | B,Z,B | Z,Z,M | Z,Z,M | Z,Z,S |
| NM | B,S,M | M,S,M | M,Z,B | S,Z,B | Z,S,M | Z,S,M | Z,S,M |
| NS | M,M,Z | M,B,S | S,M,S | Z,B,S | S,M,S | S,M,S | S,M,Z |
| ZE | M,B,Z | S,B,Z | Z,B,S | Z,B,Z | S,B,Z | S,B,Z | M,B,Z |
| PS | S,M,Z | S,B,S | S,M,S | Z,B,S | M,M,S | M,M,S | M,M,Z |
| PM | S,S,M | Z,S,M | S,Z,B | S,Z,B | M,S,M | M,S,M | B,S,M |
| PB | Z,Z,S | Z,Z,M | B,Z,B | B,Z,B | B,Z,M | B,Z,M | B,Z,S |
为了验证本研究设计的ABS控制器在不同附着条件下的制动性能,设定初始车速为120 km/h,分别在干燥混凝土路面、对接路面和对开路面3种典型工况下开展制动仿真实验,车辆纵向速度与轮胎滑移率的动态变化过程如图6所示. 在干燥混凝土路面工况下,车辆制动过程中车速迅速下降,轮胎滑移率快速逼近预设理想值,表明ABS控制器能够在高附着路面下实现稳定、有效的制动控制. 在对接路面工况下,设定附着系数在30 m处发生变化,有低附着系数路面突变为高附着系数路面,期望滑移率由0.1突变为0.2. 从仿真结果可见,车辆在低附着区域内车速下降缓慢;进入高附着区域后,制动强度迅速增强,滑移率可稳定调节至更新后的目标值附近. 在对开路面工况下,车辆两侧轮胎分别行驶于不同附着条件的路面:左侧为低附着表面,右侧为高附着路面,对应期望滑移率分别设定为0.1和0.2. 结果表明,尽管两侧轮胎减速能力存在明显差异,控制器仍能使各轮滑移率分别收敛至理想值,但由于纵向制动不均衡,左侧车轮制动速度明显低于右侧车轮.
图 6
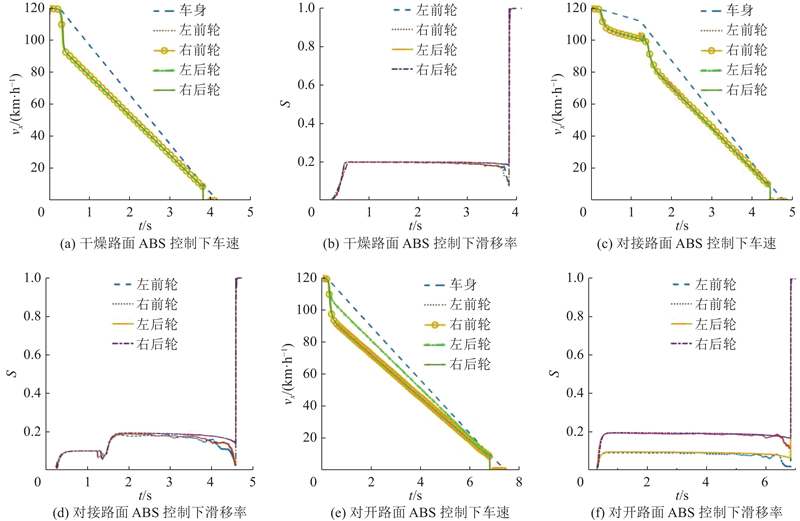
图 6 防抱死制动系统的制动过程仿真曲线
Fig.6 Braking process simulation curve of anti-lock braking system
3.2. 理想变传动比设计
由于车辆的轮胎、悬架系统本身存在固有的非线性特性,难以直接改变. 为了改善系统的转向特性,通常通过调整传动比来实现优化. 传统汽车传动比Ir取固定值,定义为方向盘转角θsw与前轮转角θc的比值:
在固定传动比的情况下,汽车低速转弯时,驾驶员需要大幅度且频繁地转动方向盘;高速转弯时,即使方向盘转动幅度较小,车辆也可能出现较大的响应. 设计理想变传动比,使得车辆能够在低速行驶时具有较高的转向灵敏度,此时驾驶员无需大幅度地转动方向盘即可实现大角度转弯,提升汽车的操控性和舒适性. 为了防止过度灵敏,须为理想变传动比设定最小值,避免过度转向. 车辆在高速行驶时,转向灵敏度适当降低,避免车辆在高速时反应过大,减少操作风险并提升驾驶稳定性. 为了避免转向反应过于迟缓,影响驾驶员的操作(如超车),须为理想变传动比设置最大值,使系统在稳定性和灵活性之间保持平衡. 以稳态横摆角速度增益为基础,确定车辆的理想变传动比. 稳态横摆角速度增益为横摆角速度γ与方向盘转角θsw的比值:
根据二自由度汽车模型求出稳态横摆角速度
理想变传送比Ir表达式为
传动比过小会导致车辆过于灵敏,过大则反应过于缓慢,不利于车辆完成转向操作. 设定理想变传动比下限值和上限值分别为Irmin和Irmax,对应的临界车速分别为vx1和vx2. 理想传动比Ir表示为
转向系统的方向盘转角范围为−180°~180°,前轮转角最大为30°,Irmin=6,设定下限临界速度vx1=20 km/h,上限临界速度vx2=100 km/h.
3.3. 主动前轮转向滑模控制器设计
式中:
式中:σ为大于零的常数. 令ṠM=0,得到前轮转角的等效输入量θfeq为
主动前轮转向系统的滑模控制包括2个关键部分:1)满足等效控制律,保证系统能够到达滑模面;2)确保在外部扰动的影响下,系统依然能够稳定收敛到滑模面. 具体结构为
式中:θf为总输入转角;Kc为滑模控制增益,决定状态变量到达滑模面的速度;∂为边界层厚度;sat为饱和函数,此处用饱和函数能避免符号函数sgn在模态切换时产生的抖振情况. 通过滑模控制方法,得到AFS提供的附加转角.
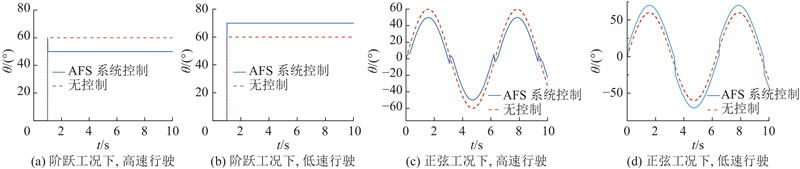
对方向盘分别进行阶跃和正弦输入,模拟车辆在高速和低速行驶中进行紧急转向操作,仿真结果分别如图7所示. 方向盘角度变化趋势代表前轮转角变化趋势,阶跃工况的阶跃时间为1 s,幅值为60°;正弦工况频率为1 rad/s,振幅为60°. 可以看出,汽车在高速行驶时,AFS会适当减少前轮转角,有效防止汽车在高速时发生过度转向或不必要的方向偏移,提升驾驶的舒适性和安全性;在低速行驶时,AFS会适当增加前轮转角,提升驾驶的灵活性.
图 7
4. 天鹰优化算法
4.1. 基础天鹰优化算法
天鹰优化算法[15]模拟天鹰捕食地面猎物的行为.
4.1.1. 初始化
算法优化过程的初始种群在每一维的上下边界Uj和Lj间随机生成.
式中:Xi为第i个解的位置,
4.1.2. 数学模型
1)扩大搜索:
式中:rand为[0, 1.0]的随机数,t为迭代次数,X1(t+1)为t+1次迭代中式(33)位置更新后得到的解,XM(t)为t迭代后种群中所有个体的平均位置,Xbest(t)为第t次迭代时猎物的大概位置,Titer为最大迭代次数. 2)缩小搜索:
式中:X2(t+1)为t+1次迭代中式(35)位置更新后得到的解,Levy(D)为莱维飞行函数,XR(t)为t次迭代时种群中的随机个体,
式中:p1为[1,20]内随机数;D1∈{1,2,···,D}为维度索引. 3) 扩大开发:
式中:X3(t+1)为t+1次迭代中式(41)位置更新后得到的解;
式中:X4(t+1)为t+1次迭代中式(42)位置更新后得到的解;QF为用于控制搜索行为的性能评价函数,QF(t)为当前迭代下该函数的值;G1为天鹰捕猎策略方式;G2为动态飞行斜率因子.
4.2. 改进天鹰优化算法
为了提升天鹰优化算法在协调控制系统中对模糊参数的寻优能力,本研究提出融合动态反向学习与基于停滞检测的扰动策略.
4.2.1. 动态反向学习策略
针对天鹰优化算法在扩大搜索过程中搜索精度下降的问题,引入动态边界反向学习:
式中:aj和bj分别为第j维的动态上界与下界,n为调节因子. 不同于传统反向学习方法依赖固定边界生成反向解,本研究引入动态边界约束(即aj和bj动态变化),以当前全局最优解为参考进行反向推导,进一步提升算法的跳出能力与搜索效率. 位置更新公式修订为
4.2.2. 基于停滞检测的扰动策略
群体智能优化算法普遍存在易陷入局部极小值的问题,天鹰优化算法存在类似缺陷. 为此,引入基于停滞检测的扰动机制. 当最优个体连续5次迭代保持不变,判定算法陷入“停滞”. 引入Levy飞行扰动个体位置,促使算法跳出局部最优解. 将位置更新公式修订为
式中:randn为随机数,服从正态分布. RLSPAO在天鹰优化算法基础上,通过引入动态反向学习与停滞检测扰动机制来增强全局搜索能力与跳出局部最优能力,能够有效避免搜索陷入局部最优,保持种群活性[16].
4.3. 优化策略的测试
优化顶层控制器在三维空间进行,为了验证改进算法在提升优化精度与跳出局部极值能力方面的性能优势,将天鹰优化算法与RLSPAO在4种低维测试函数上进行对比,适应度收敛曲线如图8所示. 可以看出,在Foxholes函数与Six Hump Camel函数中,RLSPAO收敛速度不如天鹰优化算法,但其收敛精度较高,可收敛到测试函数的最优适应度处;在Branin函数和Hartman 3函数中,RLSPAO的收敛速度与收敛精度均有所提升,增强了全局搜索能力,减少了陷入局部最优的风险,进一步验证了优化策略能解决搜索精度不足的问题.
图 8
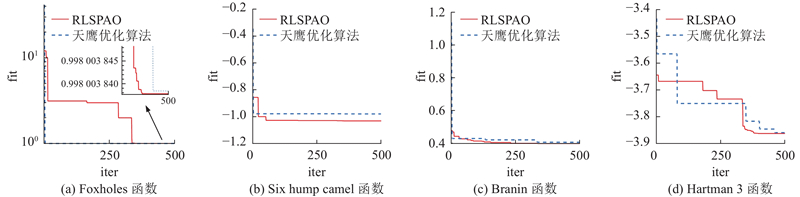
图 8 不同天鹰优化算法在4种测试函数上的收敛曲线对比
Fig.8 Comparison of convergence curves of different Aquila optimizers on four test functions
5. 协调控制算法优化设计
5.1. 顶层控制器设计
模糊控制输入为实际质心侧偏角与理想质心侧偏角的误差eβ及其变化率
图 9

表 2 顶层控制器模糊控制规则表
Tab.2
| eβ | QA | ||||||
| a1 | PB | PB | PS | Z | PS | PB | PB |
| a2 | PB | PM | Z | NS | Z | PM | PB |
| a3 | PS | Z | NM | NB | NS | Z | PS |
| z | Z | NS | NB | NB | NB | NS | Z |
| b1 | PS | Z | NS | NB | NM | Z | PS |
| b2 | PB | PM | Z | NS | Z | PM | PB |
| b3 | PB | PB | PS | Z | PS | PB | PB |
式中:μ为隶属度函数;vj'为论域元素. 由式(50)得到QA,利用其对协调系统进行分配控制,分配公式为
式中:
在模糊顶层控制器中,子控制器AFS和ABS的协同作用通过权重值动态调节完成. 模糊顶层控制器以质心侧偏角误差及其变化率作为输入,输出为QA,实现2个子系统控制优先级的自适应调整. 当车辆处于转向不足或过度转向状态时,即质心侧偏角误差及其变化率均较大,表明车辆存在明显的横向偏移趋势. 为了避免车身失稳,系统将提升QA,加强对前轮转角的控制作用,快速修正车辆偏移轨迹,增强操控稳定性. 当质心侧偏角误差及其变化率较小时,车辆运行状态较为平稳,横向动态响应处于可控范围内. 此时,系统将相应降低AFS控制权重,转而更多依赖ABS进行制动力调节,以维持纵向稳定性并减少转向干预. 模糊顶层控制器中的动态权重分配机制使得车辆在不同工况下能够实现横、纵向控制重心的自由切换,提高协调控制的稳定性.
5.2. 顶层控制器离线优化设计
在模糊控制系统中,量化因子ke和
图 10
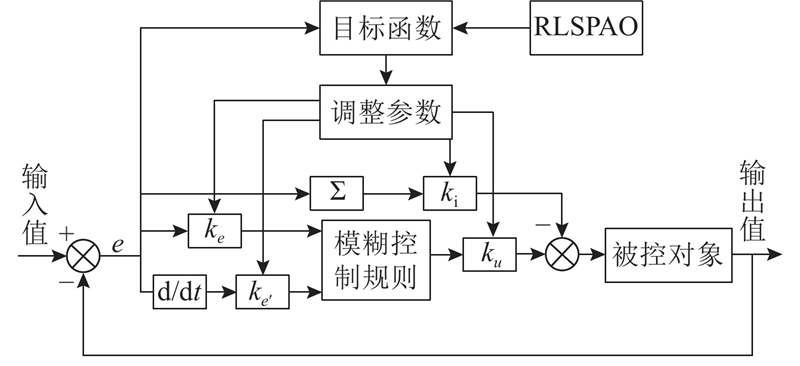
图 10 改进天鹰优化算法优化的顶层控制器结构
Fig.10 Structure of top-level controller optimized by improved Aquila optimization algorithm
6. 仿真结果分析
设置汽车初始速度为120 km/h,将RLSPAO-顶层控制器与天鹰优化算法(AO)-顶层控制器、顶层控制器、电液复合ABS控制在方向盘阶跃工况、方向盘正弦工况及对开路面对车辆制动及横向稳定性进行仿真实验.
如图11所示为阶跃工况下的仿真结果. 在该工况下,车速v=120 km/h,方向盘转角θsw=60°,车辆在干燥混凝土路面进行制动. 相比于其他控制方法,RLSPAO-顶层控制器的控制效果最佳,横摆角速度及质心侧偏角的响应幅值最小,与理想值最接近,使车辆具有更好的转向制动稳定性. 采用ABS控制时,ABS主要负责纵向制动,并不会主动修正车辆的横向运动,因此车辆的横摆角速度和质心侧偏角均出现较大的幅值变化. 相比于ABS控制、顶层控制器以及AO-顶层控制器,RLSPAO-顶层控制器使车辆的制动时间分别减少了4.37%、2.72%和0.53%,纵向位移分别减少了5.85%、3.20%和1.03%. 通过图11(d)可知,制动前3 s,QA稳定在0.2附近,表明RLSPAO-顶层控制器优先保障制动系统的纵向控制能力,3.7 s处QA激增至0.5的峰值,系统在制动末段临界状态下强化AFS横向控制的主动调节机制. 实验结果表明,在方向盘阶跃工况下制动时,RLSPAO-顶层控制器能有效提升汽车的制动性能和横向稳定性.
图 11
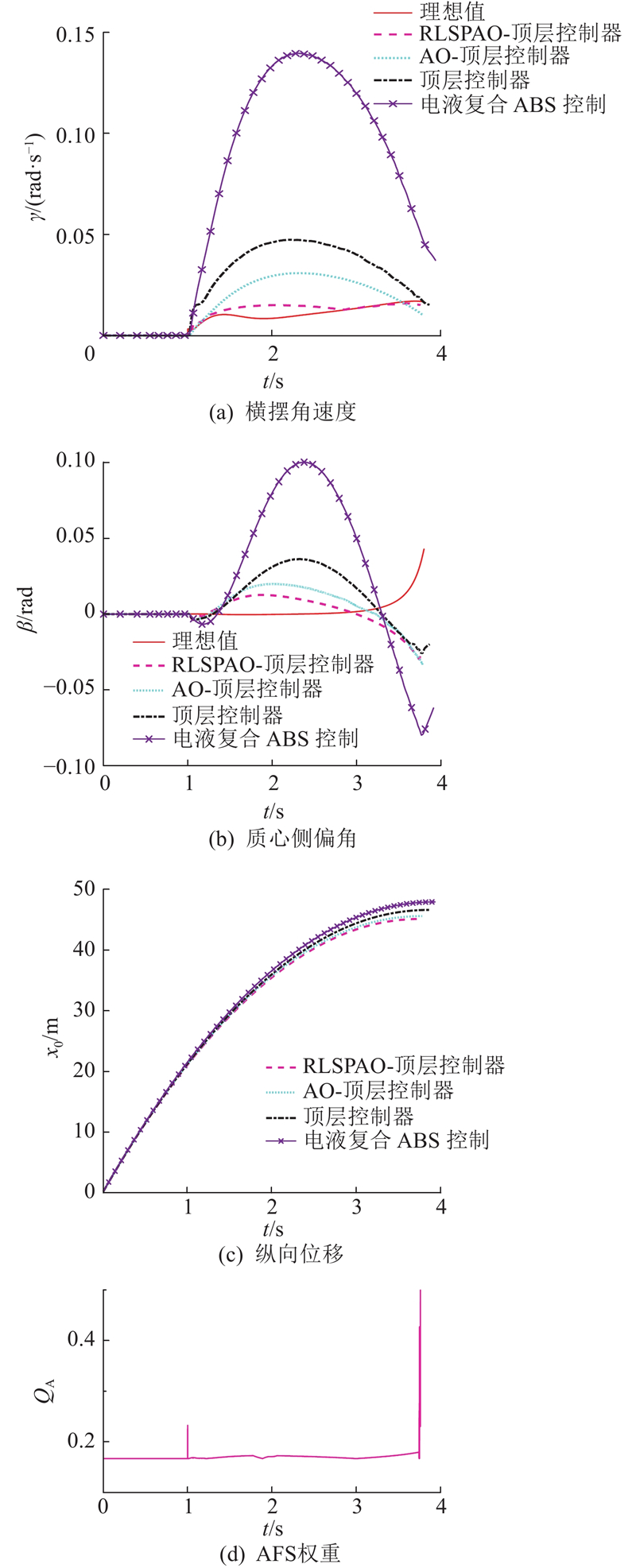
图 11 不同控制器在阶跃工况下的控制性能参数对比
Fig.11 Comparison of control performance parameters of different controllers under step condition
如图12所示为正弦工况下的仿真结果. 在该工况下,车速v=120 km/h,方向盘转角θsw=60°,车辆在干燥混凝土路面进行制动. 由图12(a)和(b)可知,RLSPAO-顶层控制器的控制效果最佳,横摆角速度及质心侧偏角波动幅值最小,最接近理想值. 由图12(c)可知,相比于ABS控制、顶层控制器以及AO-顶层控制器,RLSPAO-顶层控制器使制动时间分别减少了4.11%、2.95%和1.11%,车辆的制动距离分别减少了4.87%、2.94%和1.09%. 由图12(d)可知,在整个制动周期内,QA持续稳定在0.2附近,说明在周期性转向输入下,车辆横向扰动呈规律性变化,顶层控制器将大部分的控制权持续交由ABS保证纵向制动效率. 实验结果表明,在方向盘正弦工况下进行制动,RLSPAO-顶层控制器能够有效降低车辆的纵向位移,提升横向稳定性,从而在车身稳定的同时提升制动性能.
图 12
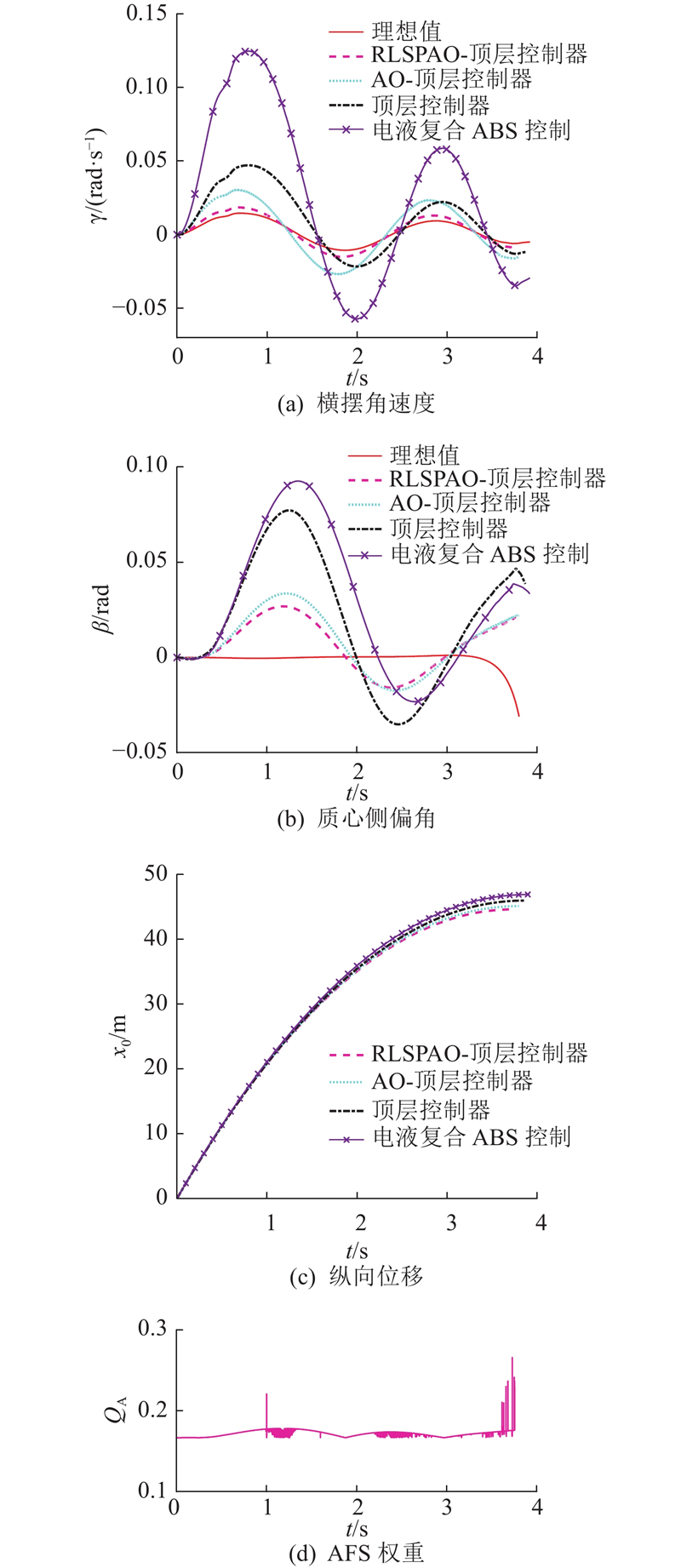
图 12 不同控制器在正弦工况下的控制性能参数对比
Fig.12 Comparison of control performance parameters of different controllers under sinusoidal condition
如图13所示为对开路面工况下的仿真结果. 在该工况下,车速v=120 km/h,方向盘转角θsw=0°,左侧路面附着系数为0.2,右侧路面附着系数为0.8. 由图13(a)和(b)可知,RLSPAO-顶层控制器控制效果最佳,此控制器下摆角速度与质心侧偏角均呈现出更小的偏离幅度,系统状态更接近理想稳定状态,使车辆在制动时更加稳定. 由图13(c)可知,相比于ABS控制、顶层控制器以及AO-顶层控制器,RLSPAO-顶层控制器使车辆的制动时间分别减少了2.51%、2.11%和0.36%,制动距离分别减少了2.98%、1.97%和0.39%. 由图13(d)可知,在刚进入制动时,QA较小,ABS快速进行制动,由于左右两侧路面附着系数不同,车辆发生横向偏移,顶层控制器随之增加QA保证车辆的整体稳定性. 实验结果表明,在对开路面进行制动时,RLSPAO-顶层控制器能最大程度使车辆尽可能保持直线制动,缩短制动距离,提升汽车整体的安全性.
图 13
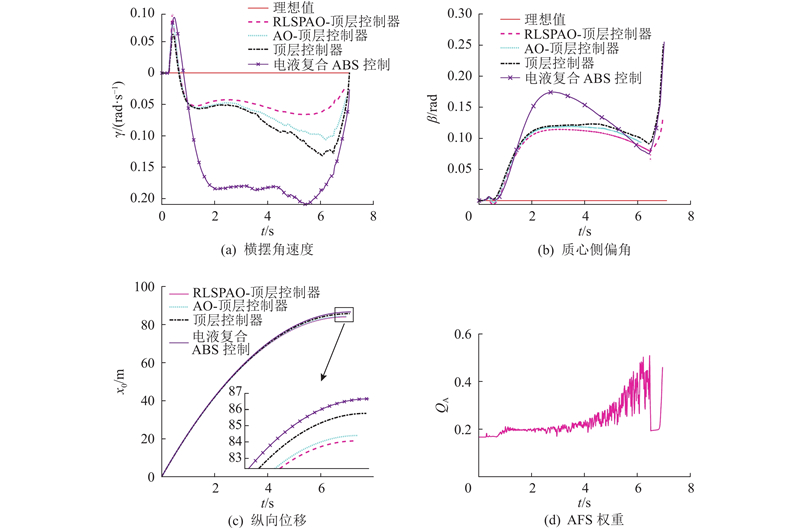
图 13 不同控制器在对开路面下的控制性能参数对比
Fig.13 Comparison of control performance parameters of different controllers under folio surfaces
不同控制器3种工况下的仿真数据如表3所示. 在不同工况下,RLSPAO-顶层控制器能更有效提升车辆的操纵稳定性. 相比AO-顶层控制器、顶层控制器以及电液复合ABS控制,在方向盘阶跃工况下,RLSPAO-顶层控制器的横摆角速度峰值γmax分别减少了48.38%、66.46%和88.61%,质心侧偏角峰值βmax分别降低了4.70%、16.48%和69.69%;在方向盘正弦工况下,RLSPAO-顶层控制器的横摆角速度峰值分别减少了39.14%、60.72%和85.16%,质心侧偏角峰值分别降低了19.94%、65.16%和70.89%;在对开路面工况下,RLSPAO-顶层控制器的横摆角速度峰值减少了8.38%、26.06%和53.53%,质心侧偏角峰值分别降低了4.03%、13.60%和34.44%. 仿真数据结果验证了本研究所提算法整定顶层控制器参数的有效性,能够显著提升车辆在不同路况下制动的稳定性和安全性.
表 3 不同控制器在3种工况下的仿真数据
Tab.3
| 控制器名称 | 阶跃工况 | 正弦工况 | 对开路面 | |||||||||||
| γmax/(rad·s−1) | βmax/rad | x0/m | t/s | γmax/(rad·s−1) | βmax/rad | x0/m | t/s | γmax/(rad·s−1) | βmax/rad | x0/m | t/s | |||
| RLSPAO-顶层控制器 | 3.761 | 3.756 | 6.948 | |||||||||||
| AO-顶层控制器 | 3.781 | 3.798 | 6.973 | |||||||||||
| 顶层控制器 | 3.866 | 3.870 | 7.098 | |||||||||||
| 电液复合ABS控制 | 3.933 | 3.917 | 7.127 | |||||||||||
7. 结 语
本文1)分析车辆在低速和高速情况下的转向特性,采用理想变传动比替换传统传动比,避免了传动比过小使车辆过于灵敏及传动比过大导致系统反应缓慢的问题,利用汽车理想二自由度模型搭建基于滑模控制的主动前轮转向系统. 2)提出基于模糊控制的顶层控制器输出为AFS的控制权重,实现ABS和AFS的协调控制,提出优化顶层控制器的算法,根据车辆不同转角及不同路况自动调节量化因子和比例因子,增强了控制器的自适应和自学习能力,能够更好满足系统性能要求. 仿真结果表明,改进控制器在多种工况下都能够有效提高车辆在复杂工况下制动时的稳定性和安全性. 本研究主要基于联合仿真平台进行控制方法的验证,尚未开展硬件在环或实车测试. 后续将以所提方法为基础,进一步拓展实时控制平台与工程部署研究;将在算法层面对RLSPAO结构进行简化与加速,引入多目标优化机制,兼顾制动稳定性、舒适性与能耗等性能指标,推动控制策略向工程实用化方向演进.
参考文献
基于目标滑移率的车辆防抱死制动系统控制算法研究
[J].DOI:10.19999/j.cnki.1004-0226.2024.04.010 [本文引用: 1]
Research on control algorithm of vehicle anti-lock braking system based on target slip rate
[J].DOI:10.19999/j.cnki.1004-0226.2024.04.010 [本文引用: 1]
An adaptive finite-time control method for antilock braking system with experimental analysis
[J].DOI:10.1177/09544070231174656 [本文引用: 1]
Analysis and control for ideal variable transmission ratio characteristics of active front wheel steering
[J].DOI:10.1504/ijmic.2024.10064195 [本文引用: 1]
Advanced longitudinal and lateral stability control system for a four-wheel-independent-drive electric vehicle using a new power converter topology
[J].DOI:10.1007/s42835-023-01384-4 [本文引用: 1]
基于AFS辅助控制的汽车四通道ABS协同控制
[J].DOI:10.3969/j.issn.1674-8425(z).2020.08.005 [本文引用: 1]
Automobile four-channel ABS cooperative control based on AFS assisted control
[J].DOI:10.3969/j.issn.1674-8425(z).2020.08.005 [本文引用: 1]
Multi-agent-based coordinated control of ABS and AFS for distributed drive electric vehicles
[J].DOI:10.3390/en15051919 [本文引用: 1]
基于Matlab/Simulink的汽车ABS系统的建模与仿真
[J].
Modeling and simulation of ABS system of automobiles based on Matlab/Simulink
[J].
改进天鹰算法优化整车ABS的模糊PID控制
[J].DOI:10.3785/j.issn.1008-973X.2025.07.014 [本文引用: 1]
Improved aquila optimizer to optimize fuzzy PID control of vehicle ABS
[J].DOI:10.3785/j.issn.1008-973X.2025.07.014 [本文引用: 1]
电动汽车复合制动控制研究现状综述
[J].DOI:10.19721/j.cnki.1001-7372.2022.11.024 [本文引用: 1]
Review of electro-mechanical composite braking control for electric vehicles
[J].DOI:10.19721/j.cnki.1001-7372.2022.11.024 [本文引用: 1]
融合多策略天鹰算法优化汽车ABS的PID控制
[J].DOI:10.11918/202405075 [本文引用: 1]
Optimizing PID control of automobile ABS by integrating multi-strategy aquila optimizer
[J].DOI:10.11918/202405075 [本文引用: 1]
Active and passive heave compensation system based on feedback linearization sliding mode variable structure control
[J].DOI:10.1016/j.oceaneng.2024.117962 [本文引用: 1]
Aquila Optimizer: a novel meta-heuristic optimization algorithm
[J].DOI:10.1016/j.cie.2021.107250 [本文引用: 1]
Enhanced Aquila optimizer algorithm for global optimization and constrained engineering problems
[J].DOI:10.3934/mbe.2022660 [本文引用: 1]
连续工况下基于PID+LQR算法的自动驾驶车辆横纵向耦合控制
[J].DOI:10.3969/j.issn.1671-1815.2022.30.043 [本文引用: 1]
Lateral and longitudinal coupling control of autonomous vehicle based on PID+LQR algorithm under continuous conditions
[J].DOI:10.3969/j.issn.1671-1815.2022.30.043 [本文引用: 1]
基于扩张状态观测器的智能汽车弯道轨迹跟踪控制
[J].DOI:10.3969/j.issn.1674-8484.2022.01.011 [本文引用: 1]
Trajectory tracking control for intelligent vehicles driving in curved road based on expanded state observers
[J].DOI:10.3969/j.issn.1674-8484.2022.01.011 [本文引用: 1]
基于滑模负载扰动观测器的USV永磁同步推进电机模糊自适应控制
[J].DOI:10.19768/j.cnki.dgjs.2024.15.008 [本文引用: 1]
Fuzzy self-adaptive control of USV permanent magnet synchronous propulsion motor based on sliding mode load disturbance observer
[J].DOI:10.19768/j.cnki.dgjs.2024.15.008 [本文引用: 1]
Research on coordinated control of electro-hydraulic composite braking for an electric vehicle based on the Fuzzy-TD3 deep reinforcement learning algorithm
[J].DOI:10.1016/j.conengprac.2025.106248 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}