

Wu等[10]提出融合改进A*与改进DWA的混合动态路径规划算法,优化A*算法路径转折点冗余问题,引入路径点距离和速度作为评价指标改进DWA. 王倩等[11]融合蚁群算法和动态窗口法,提出多指标寻优的启发式函数和信息素更新策略,提升蚁群的寻优能力和未知环境下机器人的避障能力. 郭建等[12]改进Dijkstra算法并采用MPC优化,提出融合改进Dijkstra算法和MPC的路径规划算法. 刘宇庭等[13]融合改进A*算法与ROA-DWA,调整启发式函数权重与自适应速度因子,提高动态避障效率. 段震等[14]提出融合IGJO与TEB的路径规划方法,提升寻优精度,并引入TEB动态规划避开移动障碍. Wu等[10,13-14]研究双轮差速模型和履带式底盘模型,不适用于单舵轮AGV. 王倩等[11]的研究表明,整体路径的全局随机性过大,不利于在有秩序的环境中运行.
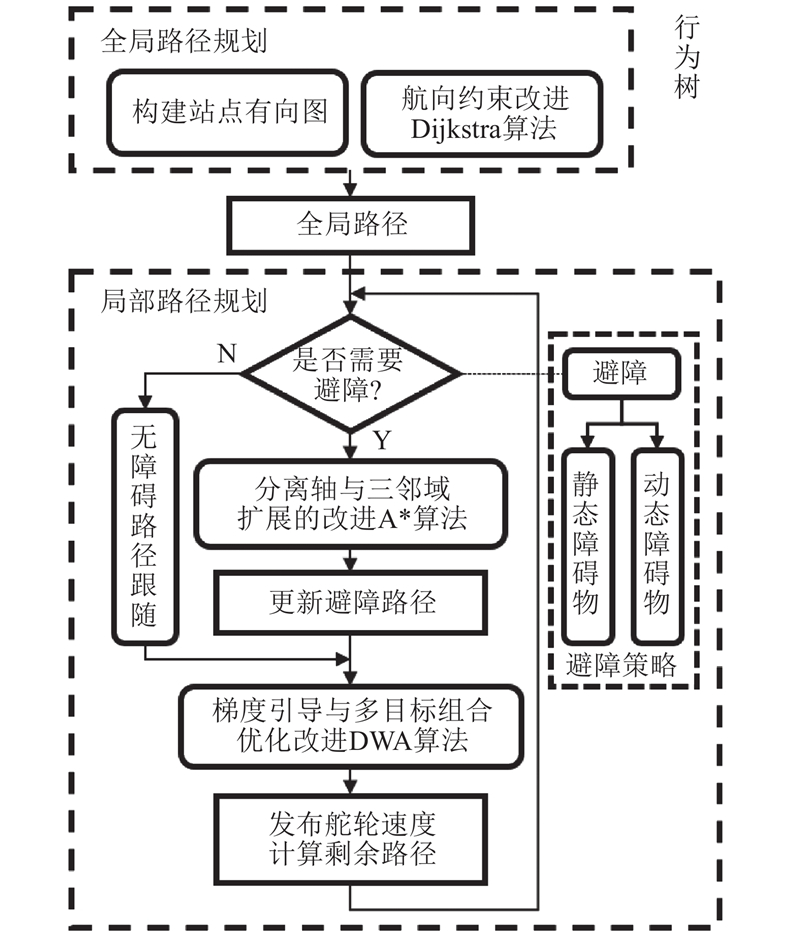
基于图搜索的Dijkstra算法更适用于仓储环境中的路径规划,Dijkstra算法在计算最短路径时,通常假设移动能力均匀且自由[15]. 单舵轮AGV在转向和运动方式上具有独特的限制,在路径选择上必须考虑到转向半径和操作灵活性,Dijkstra算法的线性路径规划可能导致路径不够灵活且效率较低,因此需要结合单舵轮AGV的运动特性进一步优化. 传统的DWA算法注重枚举模拟轨迹群并且只判断每个轨迹群的终点位置与参考点的契合度,忽略了整条轨迹与前向路径的契合程度[16-17],当开展局部路径规划时,极易出现模拟轨迹与期望轨迹偏差较大的情况. 为了解决传统算法不适用于单舵轮AGV的问题,针对仓储环境中物流作业的高秩序性需求,提出基于Nav2行为树融合路径规划与避障策略的整体导航系统. 具体创新点如下. 1)构建整体物流环境的单舵轮AGV运行有向图,提出基于站点与航向约束的改进Dijkstra全局路径规划算法. 2)提出基于多目标组合优化的梯度引导改进DWA算法,提出分离轴与三邻域的改进A*算法规划避障路径,二者共同工作进行局部路径规划. 3)提出基于Nav2行为树的避障策略构建方式,使得单舵轮AGV在仓储物流环境中可以应对不同属性的障碍物,灵活性更高. 通过仿真与实车验证,保证算法的可实现性与高效性.
1. 全局路径规划
1.1. 单舵轮AGV库位交互
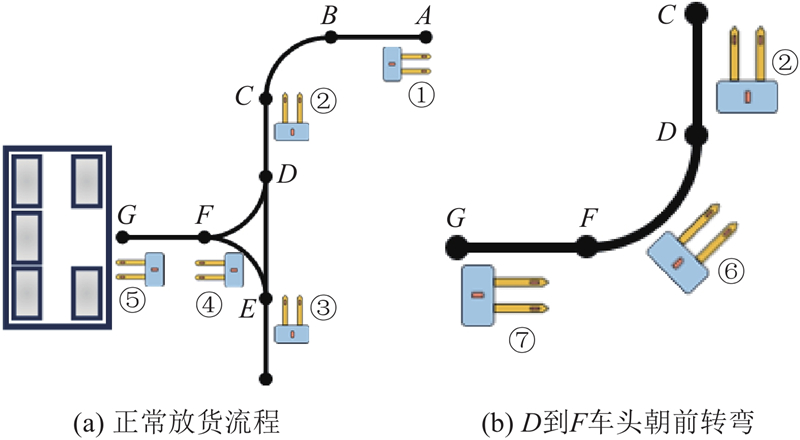
图 1
1.2. 航向约束改进Dijkstra算法
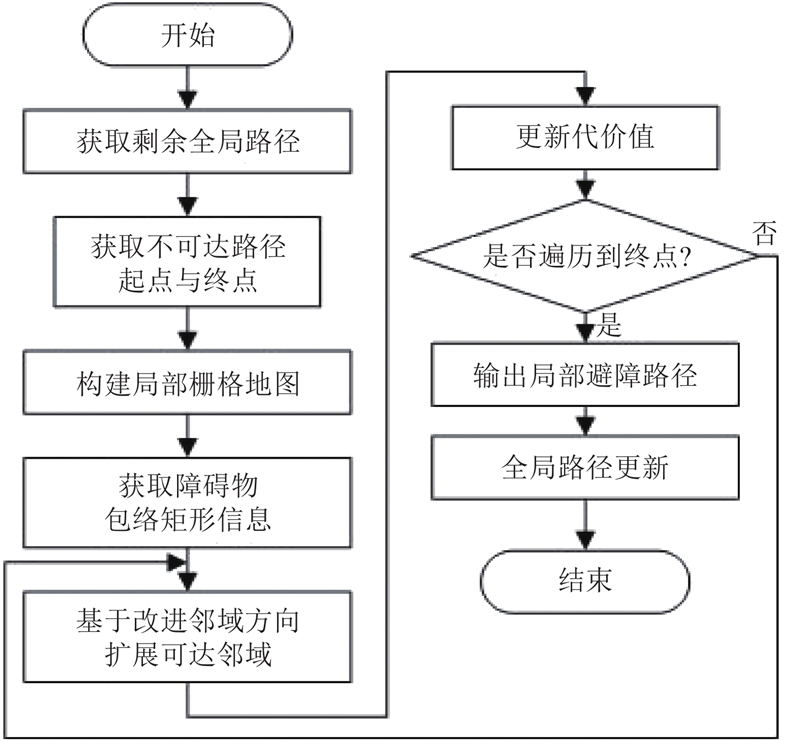
针对仓储物流整体环境须保持秩序性、单舵轮AGV转弯需要一定的转弯半径以及传统Dijkstra算法面对大型网图时搜寻效率低的问题,提出基于站点与航向约束的改进Dijkstra算法,流程如图2所示. 思路如下. 1)在整体静态环境地图中规划出整体仓储物流中的各点位,部署期望路径站点,除非必要的倒车入库路径,其余均以车头朝前的运行方式. 2)在全局地图中设置站点位置和与相邻节点的期望运行方向后,构建全图信息. 提出采用构建子图的方式,根据起点和终点的状态信息构建不同的子图,极大地减少了路径搜索时间. 3)构建航向约束扩展子图,防止出现传统Dijkstra算法中不考虑运行方向,即图1(b)的实际与期望位姿不符的情况.
图 2

2. 局部路径规划
2.1. 梯度引导与多目标组合优化改进DWA算法
针对传统的DWA算法忽略整条轨迹与前向路径的契合程度,提出基于多目标组合优化的梯度引导改进DWA算法,如图3所示. 构建舵轮速度与侧向跟踪误差的数学模型、舵轮速度与角度偏差的数学模型. 结合梯度下降分配权重及组合优化,获取动态窗口域的最优解. 根据前向模拟时间模拟出连续的多组速度,将最优速度发布到控制底盘.
图 3

结合单舵轮AGV的运动学模型,得到舵轮速度、侧向跟踪误差和角度偏差的数学模型,如下所示.
式中:v为舵轮的线速度,θ为舵轮的偏转角度,(x0, y0)、
式中:m为梯度因子. 权重分配后的θ结果如下:
式中:a为侧向跟踪误差的计算权重,β为角度偏差的计算权重. 收敛条件如下:
式中:ε为较小的值.
当AGV进行货物搬运作业时,在任务过程中将着重优化侧向跟踪误差,须提高权重a. 在接近任务点前着重优化角度偏差,须提高权重β. 在经由多次实验研究后,当AGV在任务过程中时,a与β分别设置为0.72和0.28;当AGV接近任务点时,a与β分别设置为0.34和0.66.
2.2. 避障路径规划
图 4
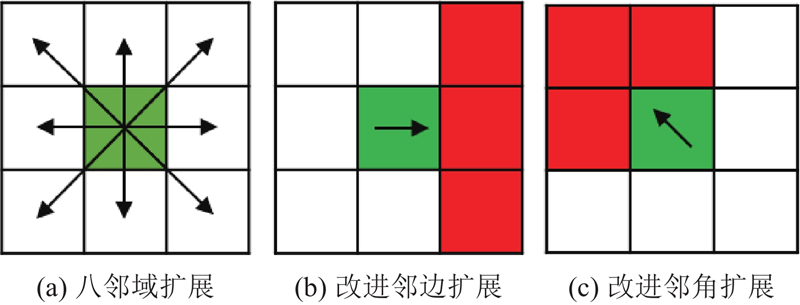
结合父节点的矢量方向,获取其方向正前方与斜前方左右45°的三邻域节点作为扩展节点,如图4(b)箭头右列的三邻域格、4(c)箭头所示的左上角3个域格所示,防止AGV规划出锯齿型路径,以降低路径跟随精度.
图 5
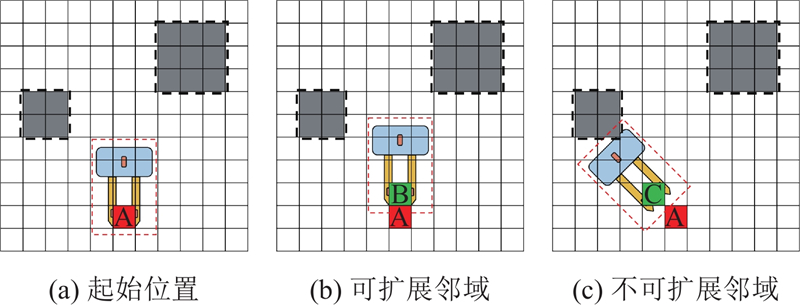
图 6
3. 行为树导航算法融合
3.1. 避障策略
图 7
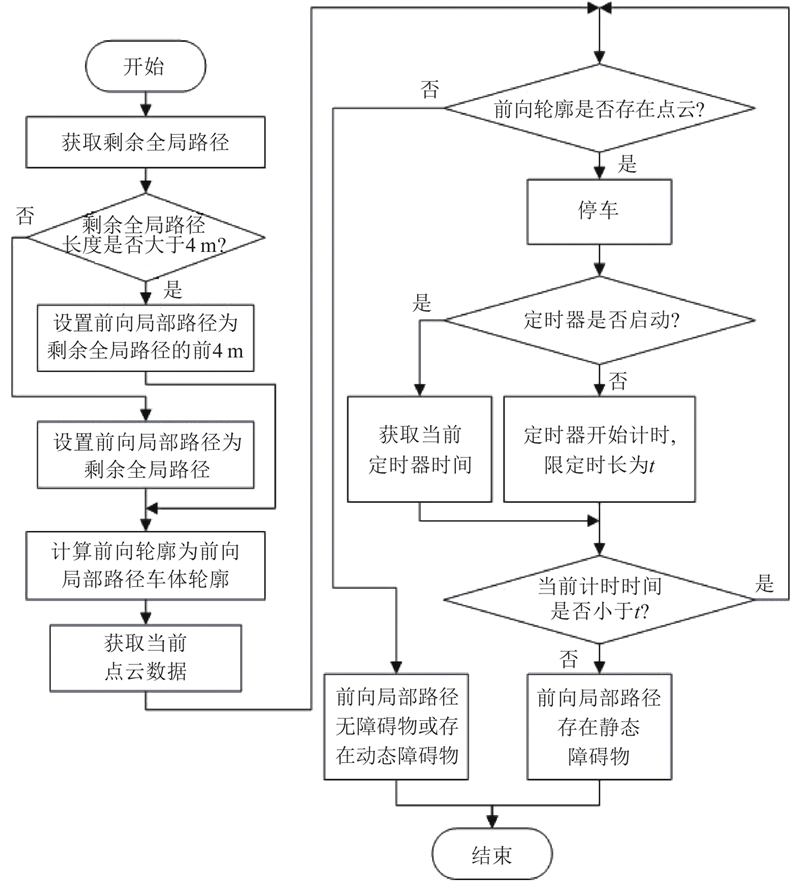
1)在剩余全局路径中获取前向4 m的所有路径点,若剩余路径不足4 m,则取全部,称作前向局部路径.
2)计算前向局部路径的车体运行轮廓,称作前向轮廓,获取相机传感器获取的点云数据,判断前向轮廓内是否存在点云,即是否存在障碍物.
3)前向轮廓存在点云后停车,设定计时时间t. 在t时间内障碍物离开前向轮廓,判定为动态障碍物,则恢复运行,无须避障. 若在t时间后前向轮廓存在障碍物,则判定前向局部路径存在静态障碍物,更新避障路径,恢复运行.
3.2. 行为树构建导航算法
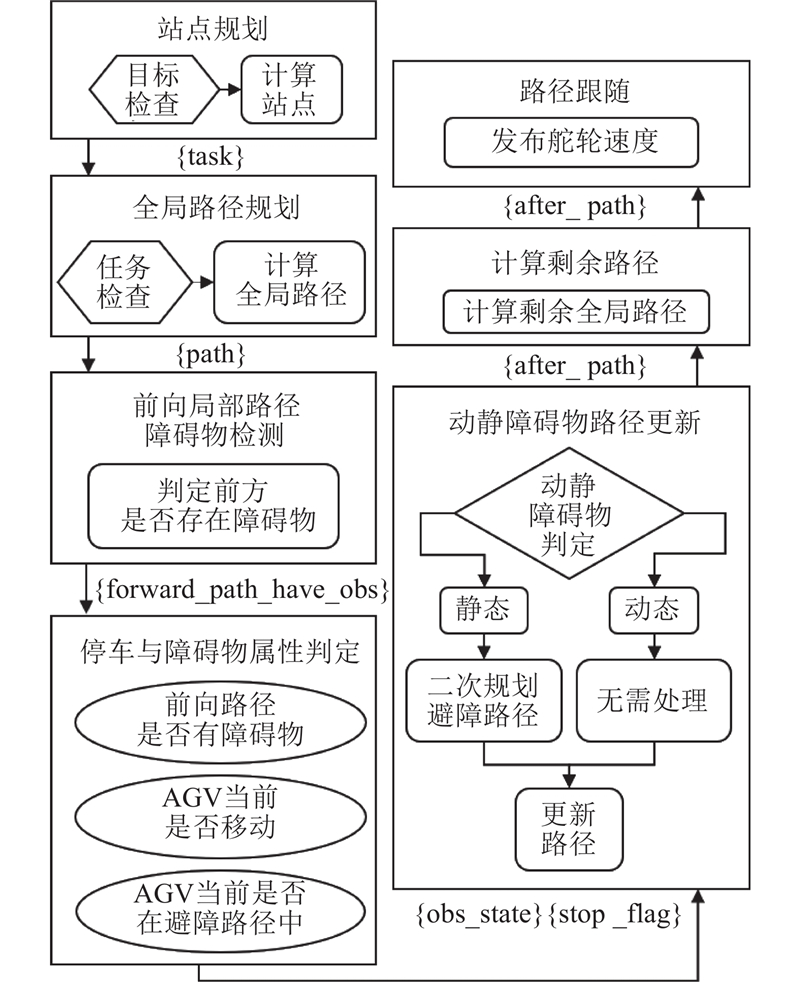
对导航功能的各个模块展开深入研究,还须统筹全局的节点,将每一子块串联成整体导航系统,行为树导航系统的架构如图8所示.
图 8
构建整体导航系统的Navigator节点,将站点规划、路径规划、前向局部路径障碍物检测、停车与障碍物属性判定、动静障碍物路径更新、计算剩余路径和路径跟随这7个模块串联结合,形成完整的导航与避障系统. 完整的行为树Navigator节点如图9所示.
图 9
4. 仿真与应用
4.1. 算法仿真
4.1.1. 全局路径规划
在仿真平台MATLAB R2021b中搭建模拟仓储仿真环境,搭建70 mx50 m整体仓储环境,具体信息如下.
图 10
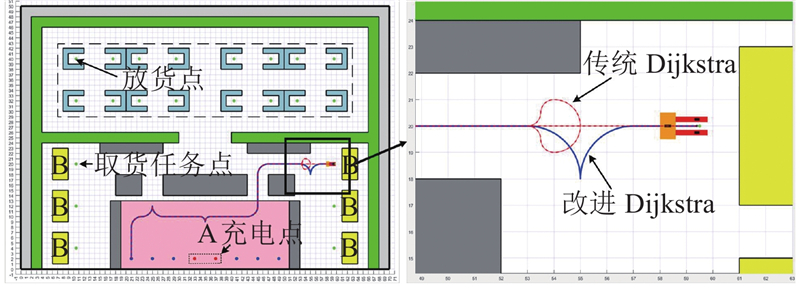
图 10 停车点到取货点的仿真对比
Fig.10 Simulation comparison of parking point to pick-up point
表 1 全局路径规划的仿真对比数据
Tab.1
| 任务信息 | 传统Dijkstra | 改进Dijkstra | 优化效率 | |||||||
| N | L/m | T/s | N | L/m | T/s | ∆N/% | ∆T/% | |||
| 停车点→取货点 | 174 | 63.53 | 0.31 | 111 | 59.53 | 0.26 | 36.2 | 16.1 | ||
| 取货点→放货点 | 174 | 69.17 | 0.31 | 162 | 68.60 | 0.30 | 6.9 | 3.2 | ||
| 放货点→充电点 | 174 | 80.62 | 0.35 | 166 | 80.05 | 0.28 | 4.6 | 20.0 | ||
| 充电点→停车点 | 174 | 32.13 | 0.38 | 32 | 32.13 | 0.22 | 81.6 | 42.1 | ||
4.1.2. 无障碍物路径跟随仿真
为了防止直线与标准圆弧衔接处产生曲率跳变而影响AGV路径跟随性能,利用同半径贝塞尔曲线优化标准圆弧部分[25]. 按照MATLAB仿真搭建的全局仓储物流环境平面图,以1꞉1的比例构建三维模拟仓储物流环境,AGV舵轮的最大线速度为1.5 m/s,最大线加速度为3.0 m/s2,最大摆动角速度为1.0 rad/s,舵轮摆动中心至运动中心的距离为1.261 m.
图 11
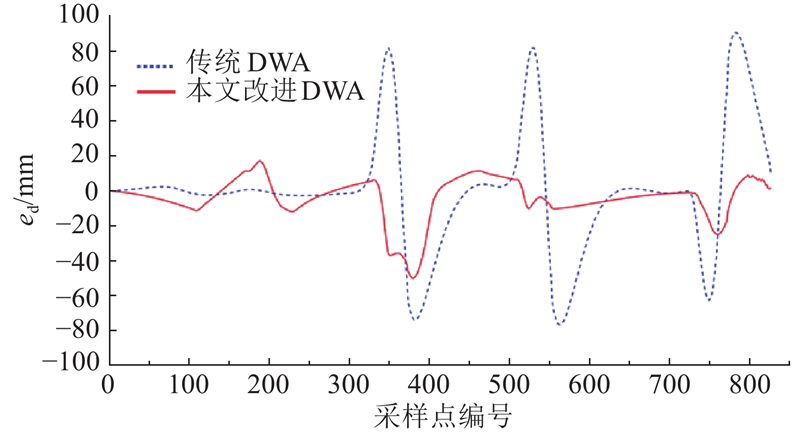
图 11 “停车点到取货点” 路径跟随
Fig.11 ‘Parking point to pick-up point’ path-following map
图 12
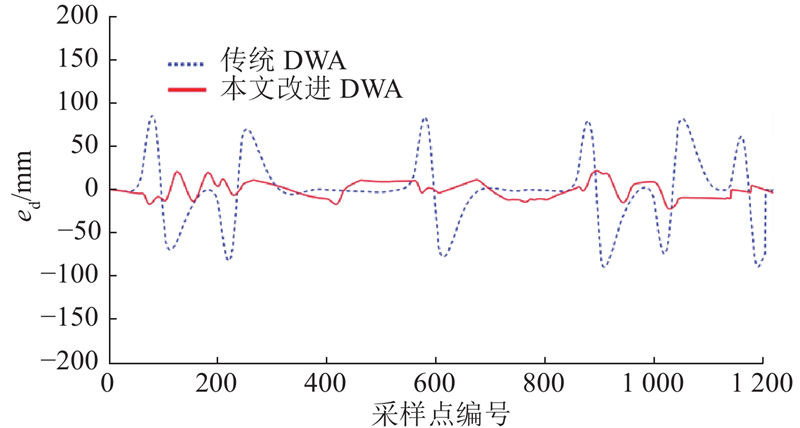
图 12 “取货点到放货点” 路径跟随
Fig.12 ‘Pick-up point to drop-off point’ path-following map
在“停车点到取货点”任务中,改进算法的侧向跟踪误差均方根为12.611 mm,较传统DWA算法降低了44.88%. 在“取货点到放货点”任务中,改进算法的侧向跟踪误差均方根为9.209 mm,较传统DWA算法降低了73.78%. 提出的改进DWA控制算法的整体误差控制在0~50 mm,表示控制精度可达50 mm,符合仓储物流的运行需求.
4.1.3. 动静障碍物的避障仿真
基于构建的避障策略,模拟场景“AGV在运行过程中检测到一个匀速移动的人经过前向路径并在短时间内离开前向路径范围”,对动态障碍物检测场景进行仿真. 模拟场景“AGV在运行过程中检测到2个储物柜静止在前向路径中”,对静态障碍物检测场景进行仿真. 避障仿真的实验结果如图13所示.
图 13
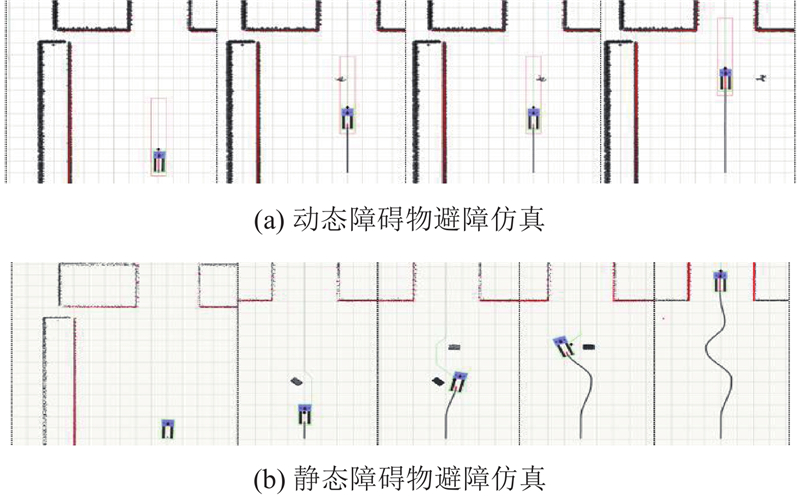
从实验结果可知,行为树使各部分节点独立工作,解耦程度较高,提高运行稳定性. 面对各类型障碍物,AGV可以准确识别并判断属性,做出相应的动作,进一步验证该导航算法的可实现性.
4.2. 应用测试
结合仓储物流环境与实际的项目经验,路径跟随精度是衡量导航算法在实时执行过程中,AGV跟随预定路径的准确度. 以“整体路径跟随误差极值”判断精度的高低,结合诸多学者关于单舵轮AGV路径跟随精度的研究和实际生产需求的标准,将整体路径的跟随误差极值精度指标设定为0~15 mm [26].
4.2.1. 无障碍物路径跟随实验
搭建整体仓储导航环境进行实验. 选取空托盘、轻载和重载3种货物作为取货对象,分别部署传统DWA算法和改进的DWA算法. 通过多次实验,分析无障碍物路径跟随时与期望路径的侧向跟踪误差,如图14所示.
图 14
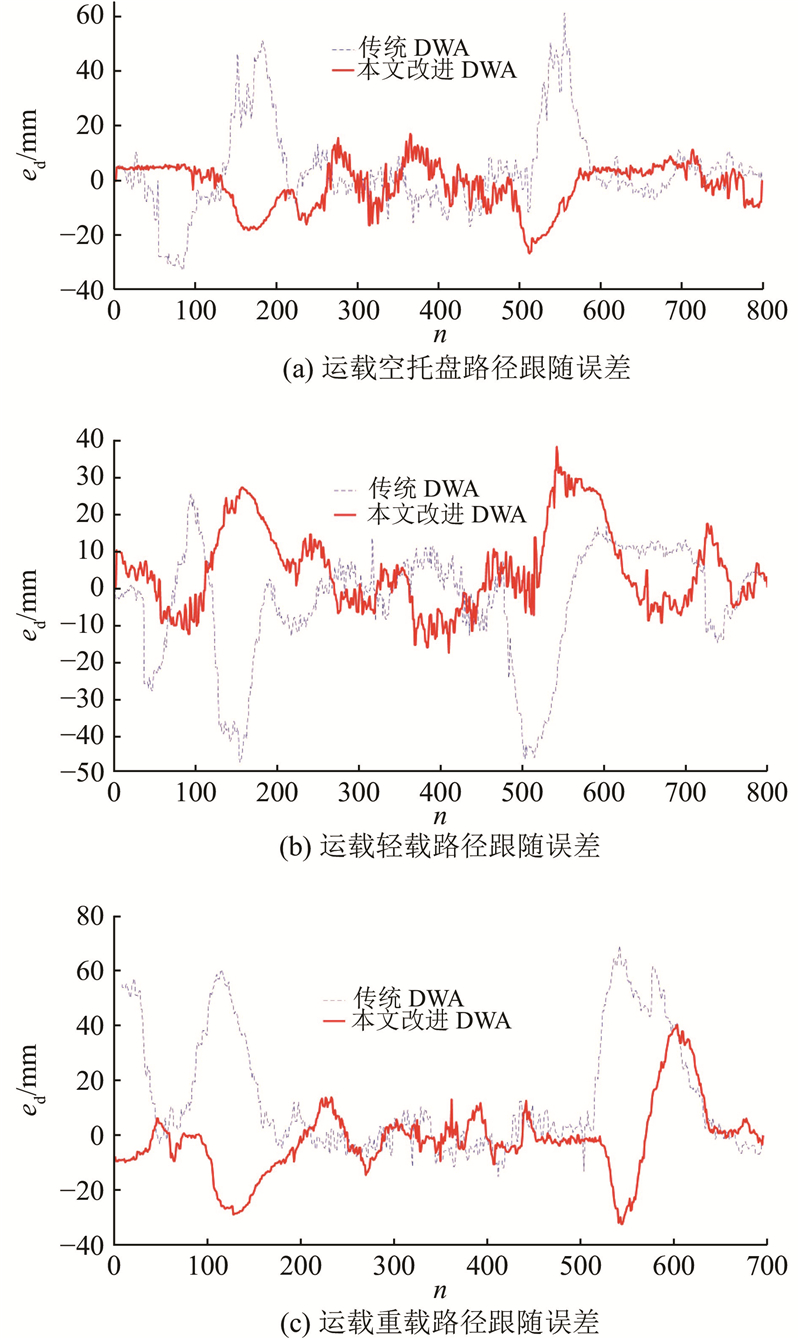
从图14可知,AGV运载空托盘时,改进DWA算法的均方根为8.499 mm,传统DWA算法的均方根为16.085 mm,整体误差降低了47.15%. 同理,AGV分别运载轻载货物与重载货物时,改进DWA算法的整体误差较传统DWA降低了24.03%和50.26%,路径跟随能力更强.
4.2.2. 动静障碍物避障实验
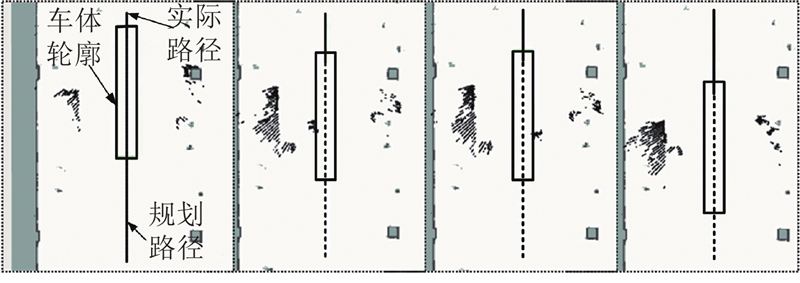
以行走的人作为动态障碍物经过AGV前向路径,AGV检测到障碍物信息后经由行为树判断,障碍物在设定时间内离开前向路径后AGV恢复运行,避让动态障碍物,AGV运行路径如图15的粗实线所示. 其中,粗实线曲线为实际运行路径,虚实线曲线为规划路径,粗实线包络多边形为前向局部路径车体轮廓.
图 15
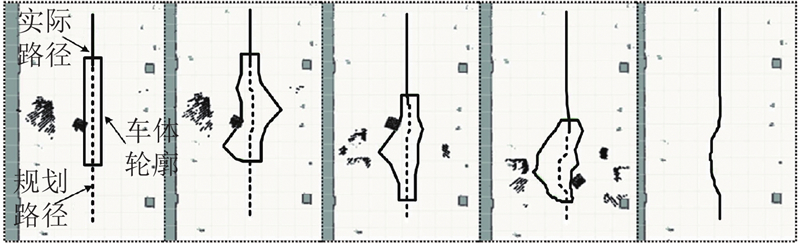
在前向路径放置2个静态障碍物,AGV运行时检测到障碍物停车,超过设定时间后障碍物依旧存在于前向路径,进入静态障碍物的避障逻辑判断,更新避障路径后恢复运行,跟随更新后的轨迹. AGV运行路径如图16的粗实线所示. 其中,粗实线为已实际运行路径,虚实线为规划路径,粗实线包络多边形为前向局部路径车体轮廓.
图 16
5. 结 论
(1)在全局路径规划方面,提出基于站点与航向约束的改进Dijkstra算法. 从仿真对比可知,改进Dijkstra算法的节点遍历数较传统Dijkstra算法最高可以降低81.6%,且面对复杂图时,寻路时间最高可以降低42.1%.
(2)在局部路径规划方面,提出基于多目标组合优化的梯度引导改进DWA算法,并提出基于分离轴与三邻域的改进A*算法规划避障路径,二者共同工作进行局部路径规划. 从仿真验证可知,改进DWA控制算法的无障碍物路径跟随误差均方根较传统算法最高可以降低73.78%,控制精度可达0~50 mm.
(3)在避障策略方面,提出基于Nav2行为树的避障策略,使单舵轮AGV在仓储物流环境中能够应对不同属性的障碍物,灵活性更高. 从仿真验证可知,在应对静态和动态障碍物时均准确识别并判断,进一步验证了该导航算法的可实现性.
(4)在某公司的单舵轮AGV运行平台上进行实验. 结果表明,当搬运不同质量的货物时,改进DWA算法的无障碍物路径跟随误差较传统DWA低,最高可以降低50.26%.
参考文献
Dynamic path planning of AGV based on kinematical constraint A* algorithm and following DWA fusion algorithms
[J].DOI:10.3390/s23084102 [本文引用: 1]
3C智能制造工厂的AGV智慧物料传输与调度综述
[J].
Review of AGV smart material transmission and dispatching in 3C smart manufacturing factories
[J].
Mecanum轮全向AGV轨迹跟踪级联控制器设计
[J].
Design of a cascade controller of trajectory tracking for omnidirectional AGV driven by Mecanum wheels
[J].
基于模型参考自适应的AGV运动控制系统设计
[J].
Design of AGV motion control system based on model reference adaptive method
[J].
基于博弈论的飞机总装物流配送系统资源配置
[J].
Resource allocation of aircraft final assembly logistics distribution system based on game theory
[J].
企业智能制造系统现状研究
[J].
Research on the present situation of enterprise intelligent manufacturing system
[J].
单舵轮AGV叉车的高精度导航算法研究与应用
[J].
Research and application of high precision navigation algorithm for single steering wheel AGV forklift
[J].
基于用户需求的叉车造型设计研究
[J].
Research on forklift modeling design based on user demand
[J].
基于深度学习的智能叉车障碍物识别与定位算法
[J].
Intelligent obstacle identiflcation and location algorithm of forklift based on deep learning
[J].
Dynamic path planning for forklift AGV based on smoothing A* and improved DWA hybrid algorithm
[J].DOI:10.3390/s22187079 [本文引用: 2]
蚁群融合动态窗口法的分布式多机器人运动规划研究
[J].
Research on distributed multi-robot motion planning based on ant colony algorithm fusion dynamic window approach
[J].
融合改进Dijkstra算法和MPC的单舵轮机器人路径规划
[J].
Path planning of single-wheeled robot based on improved Dijkstra algorithm and model prediction
[J].
改进A*与ROA-DWA融合的机器人路径规划
[J].
Path planning based on fusion of improved A* and ROA-DWA for robot
[J].
融合IGJO与TEB算法的移动机器人路径规划
[J].
Path planning for mobile robot integrating IGJO and TEB algorithms
[J].
Path planning of mobile robot with PSO-based APF and fuzzy-based DWA subject to moving obstacles
[J].DOI:10.1177/01423312211024798 [本文引用: 1]
基于改进A*算法与优化DWA的差速移动机器人路径规划
[J].
Path planning of differential mobile robot based on improved A* and DWA algorithm
[J].
室外未知环境下的AGV地貌主动探索感知
[J].
AGV active landform exploration and perception in an unknown outdoor environment
[J].
基于改进动态窗口法的AGV路径规划
[J].
AGV path planning based on improved dynamic window method
[J].
基于分离轴算法的机场场面飞行器冲突告警研究
[J].
Research on aircraft collision warning at airport scene based on separation axis algorithm
[J].
基于ROS2.0四足抓取机器人的设计
[J].
Design of quadruped grasping robot based on ROS2.0
[J].
Α behavior trees-based architecture towards operation planning in hybrid manufacturing
[J].DOI:10.1080/0951192X.2023.2228254 [本文引用: 1]
基于改进GA算法的AGV运输车路径优化及自动物流仓储系统闭环管控研究
[J].
Research on AGV transporter path optimization and closed-loop control of automatic logistics and warehousing system based on improved GA algorithm
[J].
基于可视图与改进遗传算法的机器人平滑路径规划
[J].
Smooth path planning for robot based on visibility graph and improved genetic algorithm
[J].
A velocity-adaptive MPC-based path tracking method for heavy-duty forklift AGVs
[J].DOI:10.3390/machines12080558 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}