基于行为树的单舵轮AGV路径规划
Single-steering-driven AGV path planning based on behavior tree
基于行为树的单舵轮AGV路径规划 |
| 林桂娟,李子涵,陈潇晨,王宇 |
|
Single-steering-driven AGV path planning based on behavior tree |
| Guijuan LIN,Zihan LI,Xiaochen CHEN,Yu WANG |
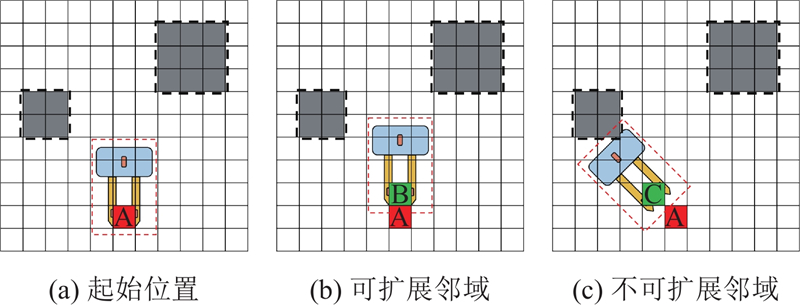
| 图 5 局部可达点的搜索方法 |
| Fig.5 Search method for local reachable point |
|
|