

近年来,国内外学者和临床针对卒中患者下肢的功能训练,提出下肢外骨骼机器人辅助步态训练的新型康复方法[6-7],与传统步态训练联合实施,能够有效改善卒中患者的步态特征,提高躯体的平衡性,增加下肢的稳定性,解决康复师的供需问题. 下肢外骨骼机器人的康复训练步态关节轨迹主要采用基于模型的方法、自适应方法和智能寻优方法等生成[8-20]. 下肢外骨骼机器人辅助步态训练与患者有主观适配性,匹配合适的康复训练步态能够充分调动患者的积极性. 对于康复训练步态的评价,主要从步行功能分级、运动指数、功能性步行能力等方面对功能性水平、对称性水平、平衡功能等步态观察性评估指标进行主观定性评价,主要形式包括Holden步行功能分级量表[21]、Rivermead运动指数量表[22]、Functional Ambulation Category Scale (FAC)功能性步行能力量表[23]、Tinetti Gait Analysis (TGA)量表[24]、Rancho Los Amigos (RLA)步态观察分析表[25]、Wisconsin 步态量表[26]、Fugl-Meyer 平衡功能量表[27]等.
综上所述,目前的下肢外骨骼机器人辅助步态训练应用处于起步阶段,康复训练步态匹配过程存在调试周期长、依赖人工经验的问题;不匹配的康复训练步态影响患者的康复体验感,可能使患者产生排斥心理. 为了提高康复训练步态的适配程度,本文提出考虑具身认知的下肢外骨骼康复训练步态匹配方法,将身体体验和感官感受作为反馈引入下肢外骨骼步态评价中,构建考虑具身认知的康复训练步态适配评价指标体系,建立下肢外骨骼康复训练步态的效用度量方法. 利用Z-number对康复训练步态进行模糊语言评价,通过模糊不确定性下的证据推理方法融合康复训练步态评价置信度,在康复训练过程中迭代匹配合适的康复训练步态. 通过实验,验证本文所提方法的正确性.
1. 基于具身认知的康复训练步态评价指标体系构建
在下肢外骨骼机器人辅助步态的训练过程中,穿戴者对康复训练步态的理解是具有身体性的,即身体是感知康复训练步态的主体,穿戴者关于康复训练步态的认知是身体在体验环境的过程中建立的,身体带来的直观体验和认知经验都会影响人对不同步态的感受. 将身体体验和感官感受作为反馈引入下肢外骨骼康复训练的步态评价中,有助于分析康复训练步态对康复心理情绪形成的机制和特点、探索与认知经验间的关系,实现康复训练步态的适配,充分调动患者的积极性.
在时空参数、关节角度、具体任务、主观量表等传统康复训练步态评价指标的基础上,结合穿戴者的感知、认知和行为活动所具有的身体性,提出考虑具身认知的康复训练步态适配评价指标. 在步态评价指标中融合穿戴者模糊的直观体验和认知经验,精确量化评价康复训练步态的效用度,帮助穿戴者适配康复训练步态. 考虑具身认知的康复训练步态适配评价指标如表1所示.
表 1 考虑具身认知的下肢外骨骼康复训练步态评价指标
Tab.1
| 评价指标 | 评价属性 |
| CⅠ: 直观感受 稳定性与安全性 | c1:运动突变情况 |
| c2:平衡性情况 | |
| c3:跌倒风险 | |
| CⅡ: 认知经验 舒适度与交互性 | c4: 帮助程度 |
| c5: 同步性情况 | |
| c6: 对抗性情况 | |
| CⅢ:关节活动角度观察 步态顺应性 | c7:双相支撑阶段躯干的前后倾斜与侧弯情况 |
| c8:支撑相膝关节过度伸展的情况 | |
| c9:摆动相膝关节、髋关节伸展不足、 过度屈曲或受限情况 |
在康复训练步态的CⅠ直观感受评价指标方面,在穿戴者体验康复训练步态的过程中,身体触觉系统可以感知压力、冷感、热感、痛感、肌肉运动感. 基本方位系统为穿戴者对地球的永恒导向,包括对指向地心垂直方向和水平面方向的方位知觉. 听觉系统感知康复训练步态使用过程中外骨骼的振动. 视觉系统可以分辨环境总体特征和物体特征,洞察环境变化,分辨不同运动和不同事件. 穿戴者通过身体触觉系统感知外骨骼与地面的接触情况,使他们能够直接感受到脚部与地面的接触压力和分布均匀性. 基于基本方位系统的方向感知,穿戴者可以通过自己的身体姿态与水平方向和地心垂直方向关系的感知,准确判断是否处于平衡状态. 这种身体姿态的感知与外骨骼步态的稳定性直接相关. 通过触觉、听觉和视觉系统,可以使穿戴者获得关于步态时空参数、关节角度、肌肉力矩、对称性等量化参数的直观体验. 从具身认知的角度出发,身体体验直接影响穿戴者对步态稳定性和安全性的认知,结合认知经验形成穿戴者对于运动突变情况、平衡性情况、跌倒风险的个人理解.
在康复训练步态的CⅡ认知经验评价指标方面,穿戴者的身体触觉系统对于人机接触面压力分布是否均匀、大小是否可以接受的知觉,加上基本方位系统对于人机系统位移的判断,会影响穿戴者对步态帮助程度、同步性的认知. 通过听觉系统感知外骨骼运动时产生的声音,比如摩擦声或机械声,不同频率和音调的声音也会帮助穿戴者形成是否存在人机活动对抗性的认知. 知觉系统的感知结合穿戴者的认知经验,形成穿戴者对于康复训练步态在舒适度和交互性方面的认知.
在康复训练步态的CⅢ治疗师观察评价指标方面,为了减少穿戴者由于运动能力较差产生的对关节活动范围较小步态的偏好或由于对康复的迫切需求产生的对于难度较大步态的偏好,引入康复师在下肢外骨骼机器人的辅助步态训练过程中对于穿戴者关节活动范围的观察评价.
2. 基于Z-number的下肢外骨骼康复训练步态效用度量
2.1. 基于Z-number的康复训练步态模糊语言评价
在步态康复初期,穿戴者对康复训练步态的认知存在较大的模糊和不确定性,难以用精确的数值描述下肢康复外骨骼步态评价指标的属性. 采用Z-number自然语言术语定性描述下肢康复外骨骼步态评价指标的属性值,在对康复训练步态评价指标的属性进行模糊约束的同时,加入康复训练步态自然语言术语评价的可靠性度量,同时处理认知过程和决策结果的不确定性,实现对于步态的准确理解和精确评价.
在康复训练步态训练前期的康复训练步态匹配过程中,假设有M个已知关节参考轨迹的步态组成的方案集
表 2 评价等级语言变量及对应的三角模糊数
Tab.2
| 序号 | 评价等级语言变量 | 对应的三角模糊数 (a1, a2, a3) |
| R1 | 很差 | (0, 0, 0.25) |
| R2 | 较差 | (0, 0.25, 0.5) |
| R3 | 一般 | (0.25, 0.5, 0.75) |
| R4 | 较好 | (0.5, 0.75, 1) |
| R5 | 很好 | (0.75, 1, 1) |
表 3 确定度语言变量及对应的三角模糊数
Tab.3
| 序号 | 确定度语言变量 | 对应的三角模糊数 (a1, a2, a3) |
| U1 | 很不确定 | (0, 0, 0.25) |
| U2 | 较不确定 | (0, 0.25, 0.5) |
| U3 | 一般确定 | (0.25, 0.5, 0.75) |
| U4 | 较确定 | (0.5, 0.75, 1) |
| U5 | 很确定 | (0.75, 1, 1) |
式中:a1、a2、a3分别为左边界、中值和右边界,a2表示最可能的情况,a1和a3表示最不可能的情况.
2.2. 康复训练步态评价的置信度融合与步态匹配度度量
在康复训练步态评价的过程中,使用模糊的自然语言术语来定义评估等级,各等级自然术语的含义会有所重叠,因此很难将评估等级定义为独立的清晰集. 例如,评估等级为“较好”和“很好”被定义为2个相关的模糊集,其交集不为空. 针对康复训练步态评价的自然语言术语非相互独立特性和传统的模糊方法无法处理置信结构中的未知部分等概率不确定性问题,采用非模糊递归证据推理方法通过区间效用来描述不完备评估的特征,将模糊信息转化为模糊置信结构,形成模糊置信决策矩阵,对每个备选方案进行匹配度的度量. 康复训练步态评价置信度融合与步态匹配度度量过程如图1所示.
图 1
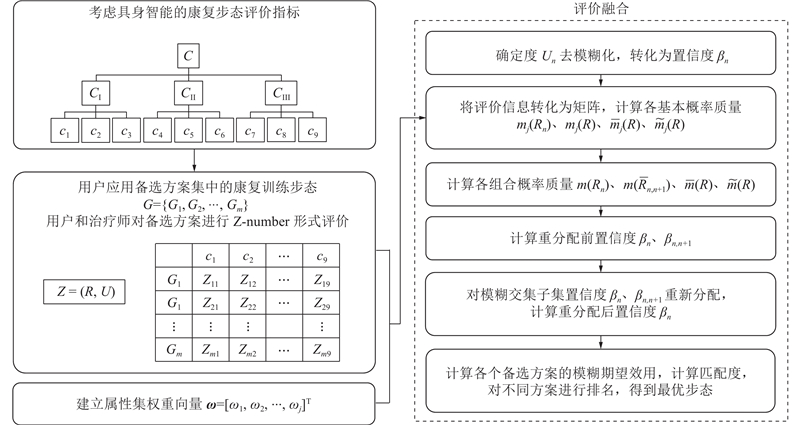
图 1 康复训练步态评价置信度融合与步态匹配度度量的过程
Fig.1 Process of gait evaluation confidence coefficient fusion and gait matching degree measurement of rehabilitation training
1)将确定度语言变量去模糊化,映射为精确数形式的置信度.
由于三角模糊数形式的康复训练步态评价的确定度Un不能参与模糊效用推理过程,将Un去模糊化,作为置信度βn参与康复训练步态的模糊效用推理过程. Un采用的去模糊化方法[32]为
式中:
2)将康复训练步态的语言Z-number评价信息转化为置信决策矩阵,计算各康复训练步态的基本概率质量.
假设有M个已知关节参考轨迹的康复训练步态集、N个等级的评价等级集R、J个评价指标,则步态Gm在评价指标cj上被评估为评价等级Rn的置信度为βn,j(Gm),则用置信结构
将康复训练步态评价指标cj的评价等级Rn及其置信度βn,j(Gm)转换为康复训练步态的基本概率质量,康复训练步态的基本概率质量计算公式如下.
式中:mn,j为基本概率质量;βR,j为剩余概率质量,分配给整个集合R,当前未分配给任何单独的评价等级;
3)计算康复训练步态的组合概率质量.
由于康复训练步态的评价等级集R的相邻2个模糊等级相互依赖,采用非递归模糊ER算法聚合评价信息[33]. 设Rn,n+1为2个相邻模糊评价等级Rn和Rn+1的模糊交集子集,则组合概率质量的计算公式如下.
式中:模糊交集子集Rn+1最大隶属度
4)计算重新分配前置信度及模糊交集子集置信度.
根据组合概率质量m(Rn)、
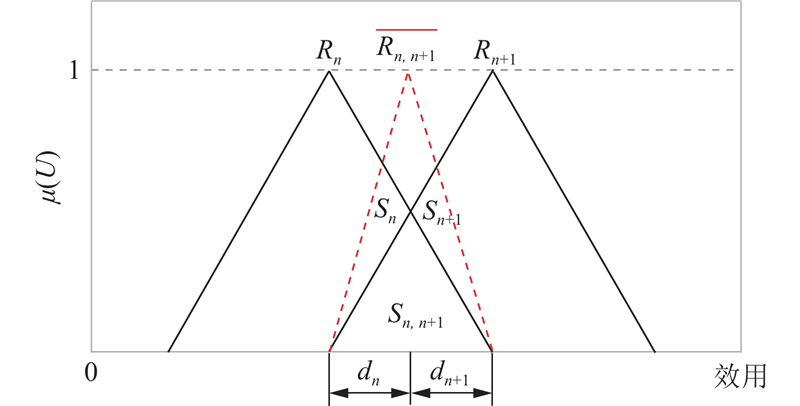
5)对模糊交集子集置信度βn+1重新分配.
在康复训练步态评价的过程中,将模糊评价等级的效用定义为模糊等级效用. 模糊效用等级应该与其相应的模糊评价等级有相同的形式,即三角模糊数的模糊效用等级也是三角模糊数. 由于
图 2
模糊评价等级Rn的最终置信度为
6)计算康复训练步态的模糊期望效用,即该康复训练步态的效用度. 依据匹配度进行康复训练步态的排名,计算匹配度最高的康复训练步态.
康复训练步态的效用反映了穿戴者和理疗师的偏好和相对期望程度,用期望函数度量. 对不同的康复训练步态方案进行排名,需要计算各个备选方案的模糊期望效用. 康复训练步态Gm的聚合评价S(y(Gm))的期望效用u(S(y(Gm)))、最大效用umax(Gm)、最小效用umin(Gm)的计算公式如下.
式中:u(Rn)为评价等级Rn的模糊效用. 若S(y(Gm))存在不完整的评价,则
针对康复训练步态期望效用u(S(y(Gm))),采用形心法对康复训练步态Gm排名以进行匹配选择. 将期望效用u(S(y(Gm)))隶属度函数图形形心与坐标原点的距离D作为匹配度,D越大表示康复训练步态Gm表现越好,则匹配度
将提出方法应用于课题组研发的下肢外骨骼机器人中,针对多名实验者进行康复训练步态匹配方法的实验验证. 选择其中一名具有代表性的健康成员作为实验者对其实验过程进行论述. 该名实验者为25岁男性,身高为171.8 cm,体重为56.6 kg. 实验者使用课题组研发的6自由度下肢康复外骨骼装置,拄拐杖行走模拟下肢外骨骼步态康复训练,其中双侧髋关节、双侧膝关节为主动控制. 使用盘式电机(Maxon,EC90flat),安装有限位开关,以防止损坏设备,确保穿戴者安全. 下肢外骨骼机器人通过控制各个关节节点单元的角度信息对整个系统进行控制,利用扰动观测器和比例积分微分控制器来实现控制. 驱动器采用循环同步位置模式,保证移动的平滑性和连续性. 康复训练步态库中的步态由IMU(IM948)设备采集,进行光顺、连续性处理后得到[13].
3. 实验验证
为了使所用的康复训练步态具有代表性,根据实验者的身高、体重、下肢参数,在康复训练步态库中初步筛选出3组备选康复训练步态
表 4 实验者和治疗师的模糊评价信息
Tab.4
| 康复训练步态 | c1 | c2 | c3 |
| G1 | (R4,U4) | (R2,U1)(R3,U4) | (R3,U4) |
| G2 | (R4,U5) | (R4,U3)(R5,U2) | (R3,U4) |
| G3 | (R2,U1),(R3,U4) | (R3,U5) | (R3,U5) |
| 康复训练步态 | c4 | c5 | c6 |
| G1 | (R3,U3)(R4,U1) | (R3,U4) | (R3,U4)(R4,U1) |
| G2 | (R4,U5) | (R4,U3)(R5,U1) | (R3,U4) |
| G3 | (R2,U4) | (R1,U1),(R2,U4) | (R1,U4) |
| 康复训练步态 | c7 | c8 | c9 |
| G1 | (R3,U4) | (R3,U4) | (R4,U5) |
| G2 | (R3,U4) | (R4,U5) | (R5,U4) |
| G3 | (R3,U4) | (R4,U5) | (R4,U4) |
1)将确定度语言变量去模糊化,以得到精确数形式的置信度. 根据式(2)对确定度语言变量去模糊化,得到
2)将评价信息转化为矩阵,计算各基本概率质量. 根据表4与βn建立评价矩阵,得到3组备选康复训练步态的置信度矩阵. 根据式(3)~(5),结合指标权重
3)计算各组合概率质量. 根据式(12),结合mj(Rn)、mj(R)、
4)根据式(13)~(15),结合组合概率质量m(Rn)、
5)对模糊交集子集置信度βn,n+1重新分配. 根据式(16)、(17)计算得到
各步态评价等级的最终置信度如下.
6)计算各个备选康复训练步态的模糊期望效用,对不同方案进行排名,得到最优康复训练步态. 根据式(20)~(23),计算得到u(S(y(Gm)))、umax(Gm)、umin(Gm)的三角模糊数及匹配度D,如表5所示. 按照匹配度的大小顺序排列,康复训练步态的优先级排序为
表 5 期望效用、最大效用和最小效用的三角模糊数
Tab.5
| 康复训练步态 | u | umax | umin | D |
| G1 | (0.274, 0.493, 0.711) | (0.788, 1.178, 1.397) | (0.274, 0.493, 0.883) | 0.595 |
| G2 | (0.376, 0.582, 0.756) | (0.907, 1.290, 1.463) | (0.376, 0.582, 0.933) | 0.661 |
| G3 | (0.198, 0.401, 0.628) | (0.876, 1.305, 1.532) | (0.198, 0.400, 0.855) | 0.528 |
下肢外骨骼康复训练步态在使用过程中,单关节角度随时间的变化规律和各关节运动的协同变化规律共同影响实验者的康复训练步态体验,会影响实验者的评价. 实验者自身多个步态周期和3组实验康复训练步态下的关节轨迹协同变化,如图3所示分别为左髋与左膝关节协同关系、左髋与右髋关节协同关系、左髋与右膝关节协同关系以及左膝与右膝关节协同关系. 图中,θ1、θ2分别为左膝、左髋关节角度,θ3、θ4分别为右膝、右髋关节角度. 从几何形状上看,协同变化曲线的基本轮廓相似但存在差异,说明在正常行走过程中,下肢各关节之间的协同关系遵循一定的规律,且对于不同的个体存在差异. 为了分析关节协同变化的规律,采用主成分分析(principal components analysis,PCA)法进行数据降维. 分别对实验者自身多个步态周期平均值和3组康复步态进行PCA分解,用余弦相似度度量实验者自身步态与3组康复步态的关节协同变化规律图形的相似度:
图 3
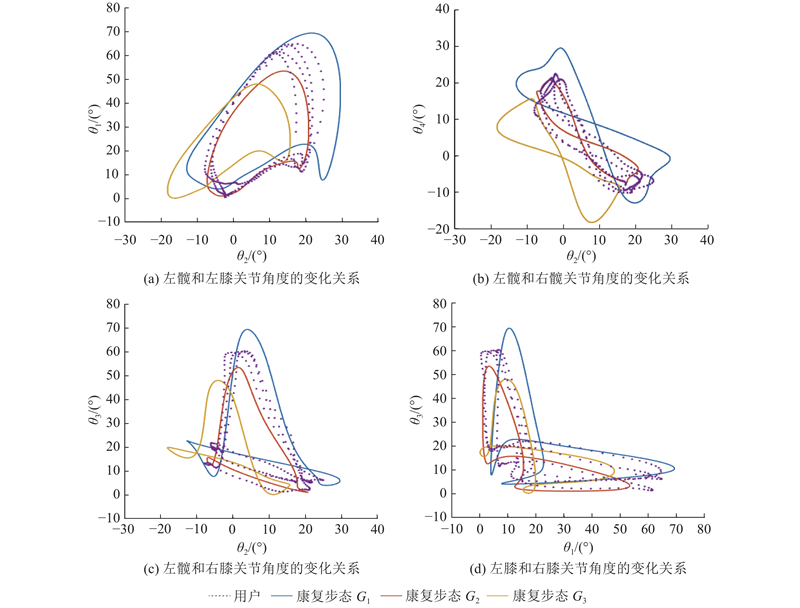
图 3 实验者和康复训练步态各关节轨迹的协同变化关系
Fig.3 Coordinated change in trajectory of each joint between user and rehabilitation gait
式中:S为实验者数据;G为康复训练步态数据;λi、δi为受试者和康复训练步态的第i个协同变化关系数据的PCA特征向量;φi为0~1.0,越接近1.0,则图形趋势的相似度越高.
φi的计算结果如表6所示,
表 6 关节协同变化规律的图形相似度
Tab.6
| 比较组 | φ1 | φ2 | φ3 | φ4 |
| S, G1 | 0.987 | 0.999 | 1.000 | 0.994 |
| S, G2 | 1.000 | 0.987 | 1.000 | 1.000 |
| S, G3 | 0.995 | 0.998 | 0.955 | 0.977 |
4. 结 语
在下肢外骨骼辅助的步态康复初期步态选择过程中,存在康复训练步态匹配调试周期长、依赖人工经验的问题. 本文提出基于具身认知的下肢外骨骼康复训练步态匹配方法,建立基于具身认知的下肢外骨骼康复训练步态评价指标. 引入基于Z-number的模糊语言评价形式,运用模糊不确定性下的证据推理方法,进行下肢外骨骼康复训练步态评价置信度融合与步态匹配度求解,排序得到最优的康复训练步态方案. 该方法充分考虑具身性在康复训练步态选择过程中的重要作用,克服了传统方法无法处理模糊决策信息的局限性,实例结果验证了提出方法的可行性.
参考文献
Global, regional, and national age-sex specific mortality for 264 causes of death, 1980-2016: a systematic analysis for the global burden of disease study 2016
[J].DOI:10.1016/S0140-6736(17)32152-9 [本文引用: 1]
中国卒中报告2020(中文版)(1)
[J].
China Stroke Report 2020 (Chinese version)(1)
[J].
Outcome measures in post-stroke arm rehabilitation trails: do existing, measures capture outcomes that are important to stroke survivors, carers, and clinicians?
[J].DOI:10.1177/0269215518823248 [本文引用: 1]
脑卒中患者早期肌力训练的最佳证据总结
[J].
Summary of the best evidence of early muscle strength training in stroke patients
[J].
Intrinsic muscle strength and voluntary activation of both lower limbs and functional performance after stroke
[J].DOI:10.1111/j.1475-097X.2008.00802.x [本文引用: 1]
Robot-assisted gait training to reduce pusher behavior: a randomized controlled trail
[J].
下肢康复外骨骼的步态交互设计研究进展
[J].DOI:10.3901/JME.2023.17.175 [本文引用: 1]
Gait interaction design of lower limb rehabilitation exoskeletons: a review
[J].DOI:10.3901/JME.2023.17.175 [本文引用: 1]
Real-time user-independent slope prediction using deep learning for modulation of robotic knee exoskeleton assistance
[J].
Personalized gait trajectory generation based on anthropometric features using random forest
[J].
Optimal fuzzy logic-based control strategy for lower limb rehabilitation exoskeleton
[J].
一种下肢康复机器人步态的生成与调节方法
[J].
A method of gait pattern generating and regulating for lower limb rehabilitation exoskeleton robot
[J].
Adaptive CPG-based gait planning with learning-based torque estimation and control for exoskeletons
[J].
Gait pattern generation algorithm for lower-extremity rehabilitation–exoskeleton robot considering wearer’s condition
[J].DOI:10.1007/s11370-020-00346-3
Research on human gait prediction and recognition algorithm of lower limb-assisted exoskeleton robot
[J].DOI:10.1007/s11370-021-00367-6
康复机器人及其临床应用综述
[J].
A survey of rehabilitation robot and its clinical applications
[J].
Individualized gait pattern generation for sharing lower limb exoskeleton robot
[J].
Rivermead运动指数的简要回顾
[J].
Brief review of Rivermead motion index
[J].
Accelerometry-based gait analysis, an additional objective approach to screen subjects at risk for falling
[J].DOI:10.1016/j.gaitpost.2012.03.015 [本文引用: 1]
Gait analysis techniques: Rancho Los Amigos hospital gait laboratory
[J].DOI:10.1093/ptj/64.12.1831 [本文引用: 1]
两种步态量表在脑卒中偏瘫步行评定中的评测者间信度
[J].DOI:10.3969/j.issn.1006-9771.2015.05.012 [本文引用: 1]
Interrater reliability of two gait scales in walking assessment of stroke hemiplegia
[J].DOI:10.3969/j.issn.1006-9771.2015.05.012 [本文引用: 1]
下肢康复机器人训练对脑卒中偏瘫患者运动能力和日常生活活动能力的影响
[J].
Effect of leg rehabilitation robot training on motor and activities of daily living in hemiplegic patients after stroke
[J].
具身认知视角下的无意识设计
[J].
Unconscious design from the perspective of embodied cognition
[J].
具身认知视角下膝关节康复机的情感化设计研究
[J].
Emotional design of knee rehabilitation machine from the perspective of embodied cognition
[J].
Fuzzy sets
[J].DOI:10.1016/S0019-9958(65)90241-X [本文引用: 1]
三角模糊数去模糊化对VIKOR妥协解的影响研究
[J].
Effect of defuzzifying triangular fuzzy number on compromise solutions in VIKOR
[J].
The evidential reasoning approach for MADA under both probabilistic and fuzzy uncertainties
[J].DOI:10.1016/j.ejor.2004.09.017 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}