

作为移动机器人自主导航的一个关键模块,速度规划负责生成给定路径的最优速度分布[5]. 其中,最优性体现在车辆运动学、初始及终止条件和贴近运动限制极限方面[6]. 目前,常用的速度规划方法可以分为基于传统方法改进的速度规划方法和基于优化的速度规划方法两大类. 对传统方法的改进包括对时间弹性带方法[7]、滑动窗口法[8]、启发式方法[9]、插值法[10]及微分方程法[11]等的改进. 基于传统方法改进的速度规划方法大多只提供可行的控制运动,难以贴近运动限制极限达到最优速度,无法处理恶劣的场景. 这种限制导致了基于优化的速度规划方法的发展. 这些方法将速度规划表述为优化问题[12-16],通过优化器进行求解.
基于优化的速度规划方法虽然在解决贴近运动限制极限的问题上取得显著进展,但大多数现有方法仍存在一些不足. 一方面,大部分基于优化的速度规划方法通常忽略了加加速度约束,这在实际机器人应用中可能引发问题. 加加速度约束是车辆动力学的关键性质之一,它限制了机器人在短时间内改变速度的能力,对于确保稳定和安全的运动至关重要. 另一方面,部分基于优化的速度规划方法未充分考虑车轮物理约束对机器人运动的影响. 车轮电机对下发速度指令的跟踪能力会影响机器人跟踪路径的精度.
基于上述考虑以及移动机器人在实际运动中受到非完整约束的影响,本文提出兼顾运动效率与执行器跟踪性能的移动机器人通用速度规划方案. 该方案将原始速度规划任务视为具有精确表述的机器人运动学和严格描述的多阶状态约束条件的最小时间最优控制问题. 其中没有特别处理速度切换点,一旦运动学约束和多阶状态约束得到充分满足,何时加速/减速或如何避免状态超限的策略将由优化过程自动确定. 在根据可达性分析通过线性规划递推出初始解的基础上,采用约束松弛方法与内点法相结合的同步迭代优化算法,求解最优控制问题. 通过仿真实验,验证该算法的适用性和有效性.
1. 移动机器人的最优速度规划问题
当研究最优速度规划问题时,假定移动机器人的几何路径由上层路径规划器生成,几何路径以笛卡尔空间中带有路径参数
1.1. 两轮差速机器人模型
双轮差分驱动机器人是典型的具有非完整约束的欠驱动系统,运动模型如图1所示.
图 1
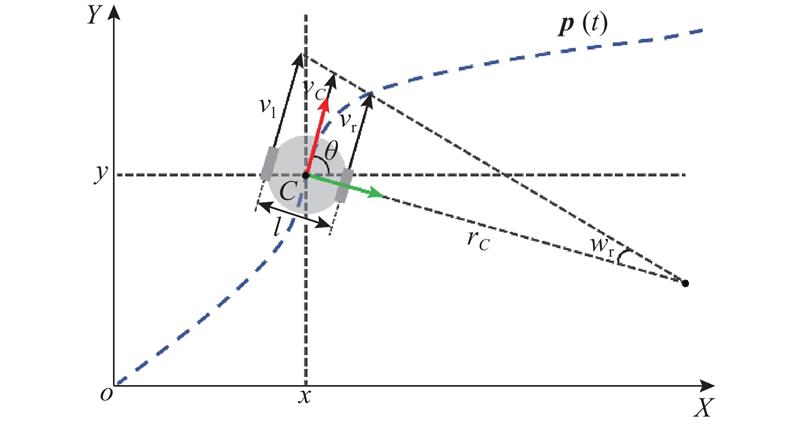
图1中,
式中:
其中,
式中:
1.2. 约束条件
移动机器人的运动规划主要包含3种约束条件:每一时刻的状态边界约束、相邻时刻的状态转移约束及起止时刻的状态点约束. 将这3种约束统一纳入约束生成器中,并在优化过程中输出到求解器中.
1.2.1. 状态边界约束
移动机器人的状态边界约束表现为车轮上运动学性能的物理极限及车体上运动学性能的规则极限. 车轮速度约束为
式中:
车轮加速度约束为
式中:
车轮加加速度约束为
式中:
车体速度约束为
式中:
车体加速度约束为
式中:
车体加加速度约束为
式中:
式(5a)~(5f)表明,机器人运动受限于能量资源与物理机构. 车轮上的加加速度约束用来削弱电机的残余振动,车体上的加加速度约束用来保证机器人运动过程平稳光滑.
1.2.2. 状态转移约束
由于驱动轮与地面接触运动为纯滚动无滑动,差分移动机器人的运动学模型为
式中:
在
式中:
1.2.3. 状态点约束
为了保证在起止时刻状态量和控制量剖面满足给定条件,可以约束相平面上路径参数的起止状态:
1.3. 目标函数
为了最小化移动机器人的运动时间,优化的目标函数定义为
将目标函数映射到
1.4. 最小时间最优控制问题
将原移动机器人的速度规划任务转化为如下Bolza最优控制问题.
由于在相平面上路径参数
2. 基于同步动态优化的速度规划算法
式(12)旨在解决机器人从初始状态移动到终止状态的过程中车轮的物理极限和环境对车体的规则要求与给定路径
2.1. 移动机器人最优速度规划算法的流程
所提移动机器人最优速度规划算法的流程框图如图2所示,算法整体上由约束生成器、初始解生成器及非线性优化器3部分构成. 在上层路径规划得到含参曲线
图 2
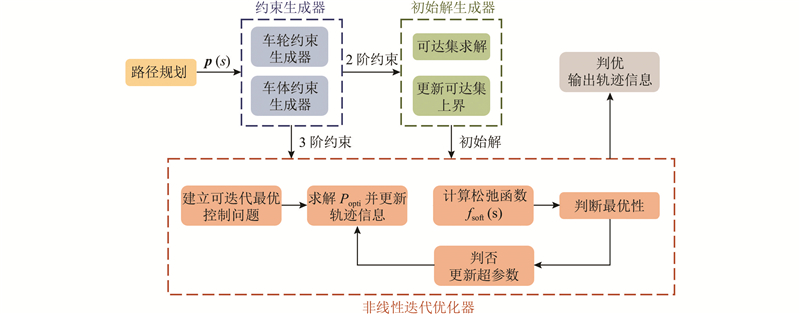
图 2 移动机器人最优速度规划算法的框图
Fig.2 Block diagram of optimal speed planning algorithm for mobile robot
1) 对由上层路径规划得到的含参曲线
2) 忽略非线性因素,纳入约束生成器中的1、2阶约束,对于离散化后的路径
3) 考虑非线性因素,纳入约束生成器中的3阶约束,建立可迭代最优控制问题
2.2. 基于可达性分析的初始解
在非线性优化中,初始解对优化速度与优化结果的影响极大. 通过拆分约束,建立2阶约束下的时间最优轨迹规划问题,得到该约束下的最优解与相关变量的取值范围. 该问题的伪代码见算法1.
算法1 基于可达集的初始解 输入:路径
对于给定路径
式中:
算法1的第3~5行给出了递归迭代的状态集(可达集)求解过程. 在
式(15)表明,对于任意的
每个可达集的上界被该点的最优速度更新,进一步作为初始条件,在非线性优化中使用.
2.3. 基于约束松弛的同步动态优化
在得到初始解与可达集后,确定状态量
算法2 基于约束松弛的非线性迭代优化 输入:初始解
其中,
算法2建立可迭代的最优控制问题,在每次迭代过程中,求解该问题并得到最优轨迹信息. 利用算法2计算松弛函数,与给定阈值进行比较. 若小于阈值,则退出迭代输出信息;反之,则更新超参数继续迭代. 具体而言,利用该迭代算法解决了以下优化问题:
松弛函数及式(17)的相关系数定义如下:
2.4. 算法特性讨论
为了解决约束优化问题(12),将其解耦成基于可达性分析的初始解生成算法与考虑3阶约束的迭代优化算法. 利用算法1生成相平面
在迭代过程中,不断提高相平面上轨迹的可行性/最优性. 假设在
当算法2从第7行退出时实现最优. 随着迭代的继续,运动学不可行性接近
3. 实验分析与验证
图 3

同步动态优化算法的基本参数和机器人的仿真参数设置如表1所示.
表 1 速度规划仿真的参数设置
Tab.1
| 参数 | 数值 | 参数 | 数值 | |
| 15 | −4 | |||
| 0.01 | 4 | |||
| 10 | −2 | |||
| 0.0001 | 2 | |||
| −2 | −4 | |||
| 2 | 4 | |||
| −4 | −4 | |||
| 4 | 4 |
为了验证所提算法在控制由忽略加加速度约束引起的加速度突变方面的有效性以及构造的速度规划方案的最优性,以具体的几何路线为例,将速度规划仿真结果与基于凸优化的速度规划算法(TOPP-RA)[5]的仿真结果进行比较. 利用TOPP-RA和所提方法得到的在
图 4
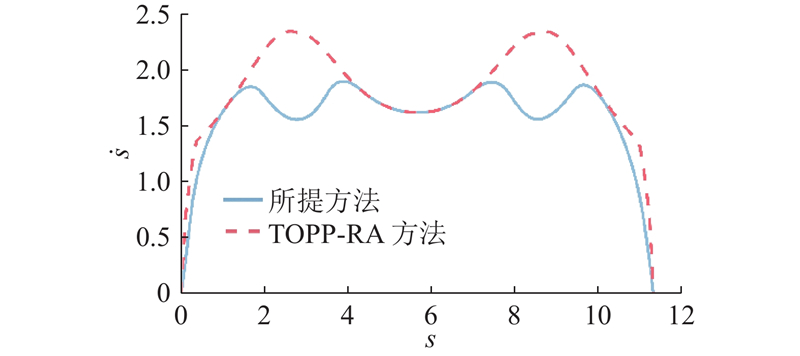
图 5
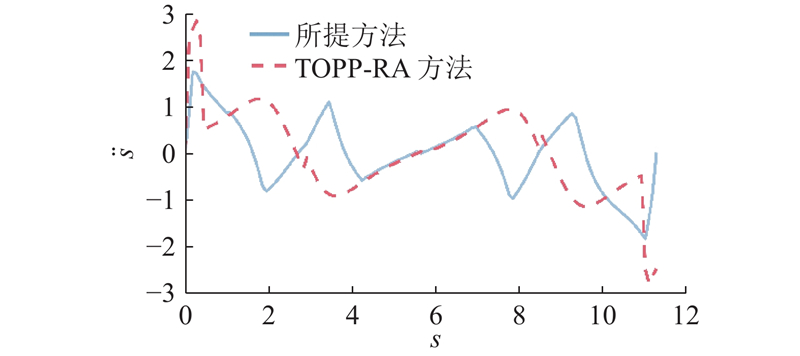
表 2 不同算法可引入的约束情况
Tab.2
| 算法 | 车轮约束 | 加加速度约束 |
| TOPP-RA | √ | × |
| Ruckig | × | √ |
| 所提方法 | √ | √ |
在实验中,为了评估所提算法的鲁棒性和通用性,开展具有不同约束的实验. 具体而言,评估了所提算法在3种不同约束限制下的性能,如图6所示. 图中,第1~6列分别为车轮速度曲线、车体速度曲线、车轮加速度曲线、车体加速度曲线、车轮加加速度曲线、车体加加速度曲线. 从图6可以看出,由于TOPP-RA方法没有对加加速度进行约束,加速度发生骤变. 所提方法在满足加速度约束(1倍车轮及车体约束)的情况下,得到最小化的执行时间,并且加速度剖面均匀变化,在表示加速和减速的部分之间实现更平滑的转换. 随着约束的严格化(0.5倍车轮约束和0.5倍车体约束),执行时间相应增加. 当添加了加加速度约束后,相应的速度、加速度、加加速度曲线至少有一条在运动过程的某个时刻达到约束的极值. 换言之,对于运动极限的贴近反映在各曲线对于约束边界的逼近. 不同的约束条件决定路径参数的优化范围,从而得到不同的路径最优配速. 除此之外,车轮约束和车体约束对控制加速度突变具有相似但存在差异的效果,在需要严格遵守约束的情况下,不能仅使用其中一种约束进行替代.
图 6
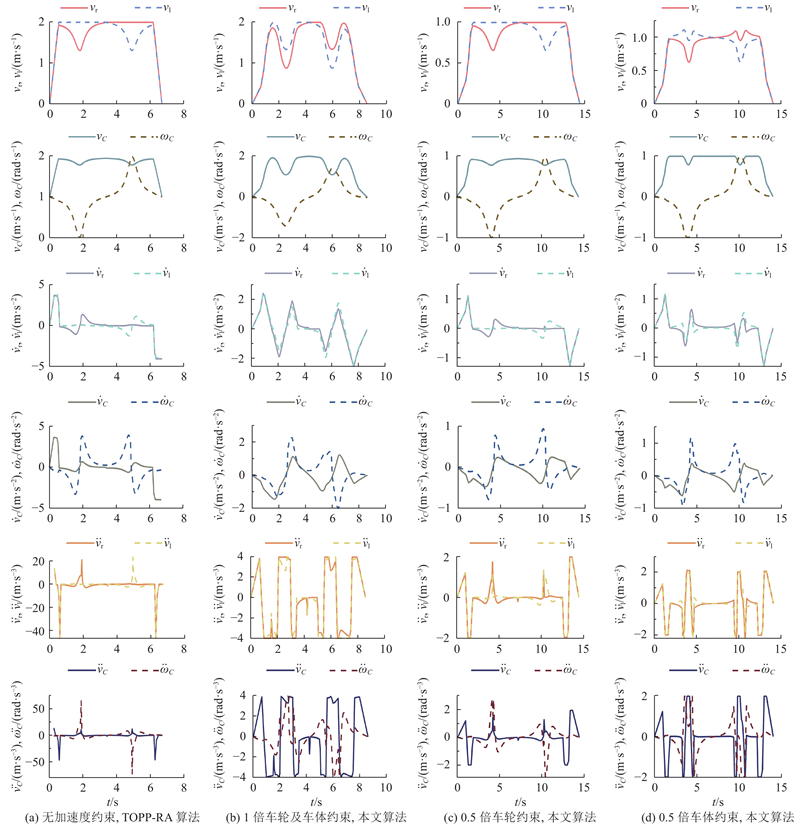
图 6 不同约束及算法下车轮及车体的速度、加速度、加加速度曲线
Fig.6 Velocity, acceleration, and jerk profile of wheel and body for various method and restriction
图 7
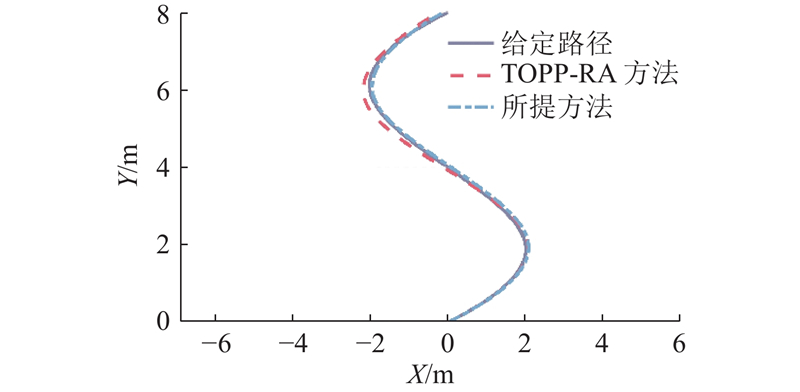
表 3 位置误差的均值和最大值
Tab.3
| 方向 | 平均位置误差/m | 最大位置误差/m | |||
| TOPP-RA | 所提方法 | TOPP-RA | 所提方法 | ||
| X | 0.1081 | 0.0858 | 0.3192 | 0.1701 | |
| Y | 0.1071 | 0.0502 | 0.2824 | 0.1567 | |
4. 结 语
对于路径规划与速度规划解耦的导航系统来说,移动机器人在兼顾运动效率与执行器跟踪性能的条件下进行运动是一个关键的挑战. 若无法达到给定约束下的最优速度从而产生振荡,则控制器开始跟踪次优速度或不可行速度,这对机器人来说十分不利(危险). 本文开发了全面有效的同步动态优化框架,将原始速度规划任务视为具有精确表述的机器人运动学和严格描述的多阶状态约束条件的最小时间最优控制问题. 根据可达性分析,在采用线性规划过程得到的初始解基础上,结合约束松弛方法与内点法,通过同步迭代优化求解最优控制问题. 通过仿真实验,验证了以上算法的有效性. 下一步将在移动服务机器人物理样机上进行相关的验证实验,探索约束放松方法,实现实时性能.
参考文献
An open-source low-cost mobile robot system with an RGB-D camera and efficient real-time navigation algorithm
[J].DOI:10.1109/ACCESS.2022.3226784 [本文引用: 1]
Toward holistic scene understanding: a transfer of human scene perception to mobile robots
[J].DOI:10.1109/MRA.2022.3210587 [本文引用: 1]
LAMDA control approaches applied to trajectory tracking for mobile robots
[J].DOI:10.1109/ACCESS.2021.3062202 [本文引用: 1]
A new approach to time-optimal path parameterization based on reachability analysis
[J].
Autonomous driving on curvy roads without reliance on Frenet frame: a Cartesian-based trajectory planning method
[J].DOI:10.1109/TITS.2022.3145389 [本文引用: 1]
Socially aware robot navigation framework: where and how to approach people in dynamic social environments
[J].
Trajectory generation of a two-wheeled mobile robot in an uncertain environment
[J].
基于车辆执行驱动能力的复杂路况速度规划及控制
[J].
Speed planning and control under complex road conditions based on vehicle executive capability
[J].
Autonomous driving trajectory optimization with dual-loop iterative anchoring path smoothing and piecewise-jerk speed optimization
[J].
Optimum velocity profile of multiple Bernstein-Bézier curves subject to constraints for mobile robots
[J].
城市郊区道路跟车条件下智能网联汽车速度规划
[J].
Speed planning of intelligent and connected vehicle under following conditions of suburban road scenarios
[J].
An overview of simultaneous strategies for dynamic optimization
[J].DOI:10.1016/j.cep.2006.06.021 [本文引用: 1]
Simultaneous dynamic optimization: a trajectory planning method for nonholonomic car-like robots
[J].DOI:10.1016/j.advengsoft.2015.04.011 [本文引用: 1]
A unified motion planning method for parking an autonomous vehicle in the presence of irregularly placed obstacles
[J].DOI:10.1016/j.knosys.2015.04.016 [本文引用: 1]
CasADi: a software framework for nonlinear optimization and optimal control
[J].DOI:10.1007/s12532-018-0139-4 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}