基于同步动态优化的移动机器人最优速度规划
Optimal velocity planning for mobile robot based on simultaneous dynamic optimization
基于同步动态优化的移动机器人最优速度规划 |
| 樊志伟,贾凯,张雷,邹风山,杜振军,刘明敏 |
|
Optimal velocity planning for mobile robot based on simultaneous dynamic optimization |
| Zhiwei FAN,Kai JIA,Lei ZHANG,Fengshan ZOU,Zhenjun DU,Mingmin LIU |
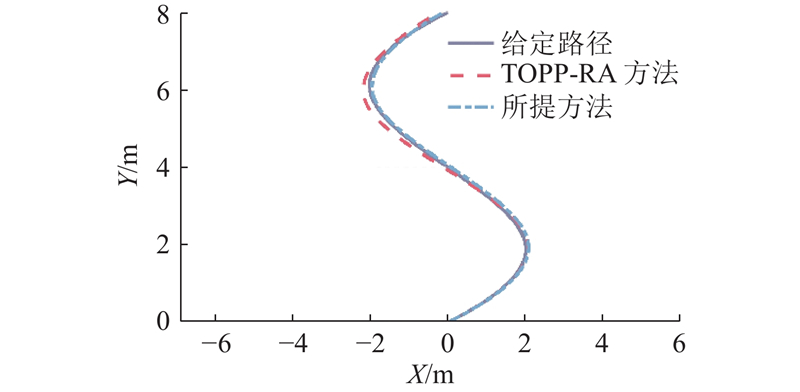
| 图 7 联合仿真位置曲线 |
| Fig.7 Joint simulation position curve |
|
|