

Kang等[7]研制的绳索驱动硅胶手康复机器人,将绳索内嵌于硅胶手套中,依靠绳索收缩带动手套运动,辅助患者完成抓握动作. Nycz等[8]研制的钢丝绳索驱动外骨骼康复机器人,采用3D打印结构以适应不同康复患者. 该装置用钢丝绳模拟手部肌腱,电机拉动钢丝绳带动外骨骼关节转动,使手指完成康复动作. 绳索驱动的机械传动系统复杂,质量偏重,不适合患者日常佩戴. Low等[9]研制的柔性气动手指外骨骼结构,通过气压驱动软体硅胶外骨骼带动手指弯曲,避免了对关节的二次伤害. Yi等[10]利用人造肌肉研制的机器手套由内部腔室和外部腔室组成,可以提供冗余的自由度,辅助完成手部康复弯曲动作和日常抓握操作任务. 气动驱动结构的管路和气源复杂,气泵在工作时有噪声. 为了解决这些问题,与肌肉更加相似的人工肌肉驱动器被尝试用于手康复装置. 形状记忆合金(shape memory alloy,SMA)具有功重比高、驱动简单的特点,被广泛用于仿生人工肌肉驱动器[11-12]. Yang等[13]研制的手部功能运动康复装置以SMA弹簧作为致动器,该团队还提出手指双向运动耦合方案. 虽然该装置结构紧凑,但是手指的输出力小. Yao等[14]研制的紧凑轻量化柔性肌肉手康复装置,在手套的掌背侧使用绳、绑带和SMA弹簧分别模拟手部肌腱、滑车和肌肉以实现与人手相似的运动. SMA弹簧设置在手臂上起到节省空间和增加行程的作用,使得该装置结构轻巧、重量轻,但SMA弹簧的输出力不大. Hadi等[15]研制的ASR手套式外骨骼机器人,基于SMA仿肌腱驱动,用于手部残疾者的康复锻炼. 实验结果显示该装置具有足够的屈伸角度,满足手指康复训练的基本需求,但结构不够紧凑. SMA的伪弹性和迟滞特性有利于生物关节黏弹性恢复[16],有效避免了康复运动中无意识痉挛对康复控制的干扰,适用于康复领域.
本研究基于手指肌肉骨骼结构运动机理分析,设计用于手指功能康复训练的SMA丝驱动外骨骼结构,构建外骨骼结构的驱动模型,提出手指被动康复策略,采用模糊神经网络PID控制,进行手指功能康复外骨骼的运动性能实验.
1. SMA驱动手指功能康复外骨骼结构
1.1. 手指骨骼肌肉结构分析
如图1所示为人类手指骨骼肌腱结构. 手指骨骼由远端指间关节(distal interphalangeal joint,DIP)、近端指间关节(proximal interphalangeal joint,PIP)、掌骨关节(metacarpophalangeal joint,MCP)和远、中、近节指骨组成. MCP具有2个自由度,DIP、PIP各有1个自由度,忽略MCP与手指屈伸无关的摆动自由度后,手指骨骼结构简化为三自由度平面连杆.
图 1
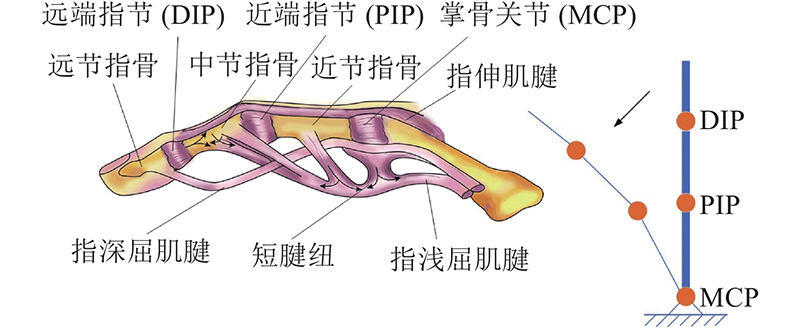
手指的屈伸运动由位于小臂内的肌肉收缩来提供动力,肌肉通过指深屈肌腱、指浅屈肌腱和指伸肌腱牵拉手指骨骼运动. 当手指做屈曲运动时,指深屈肌腱和指浅屈肌腱拉动手指指骨;当手指做伸展运动时,指伸肌腱拉动远节指骨,使手指3个关节同步旋转完成手指伸展.
1.2. SMA驱动手指功能康复外骨骼结构设计
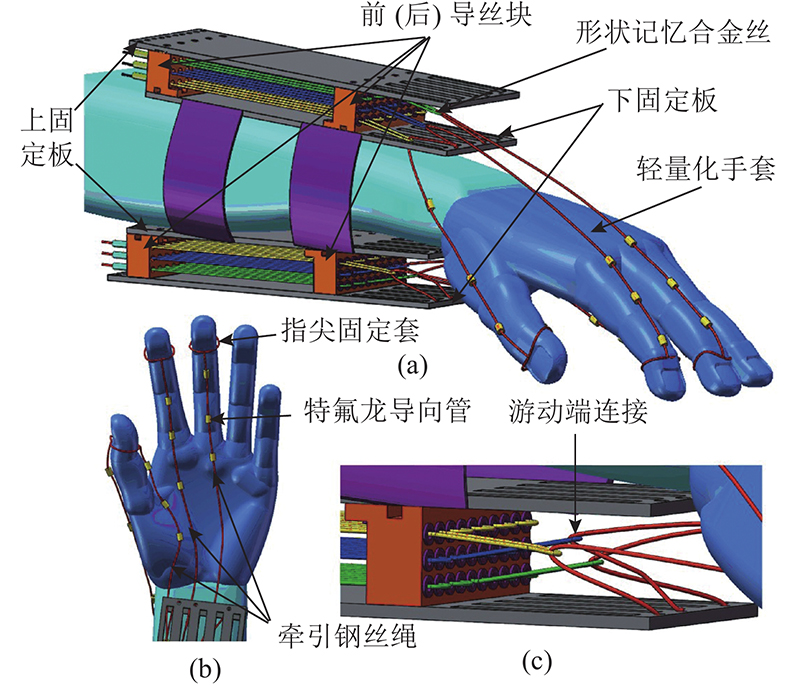
为了避免外骨骼结构对患者手指康复造成二次伤害,康复外骨骼结构应尽量与人体契合. 手指功能康复外骨骼结构采用与肌肉相似的SMA丝为致动器. 如图2所示,SMA驱动手指功能康复外骨骼由手部执行机构和驱动装置(包括SMA丝、固定板、导丝块)组成. 为了提高驱动装置的输出位移,设计往复布丝结构,将SMA丝应变转化为外骨骼牵引钢丝绳的位移. 采用轻量化手套作为手部外骨骼结构,在手指各段指骨中间位置安置特氟龙导向管,减小手套式外骨骼与牵引钢丝绳间的阻力,确保在完成屈曲、伸展动作时手部执行机构与手指近似贴合. SMA丝在驱动装置末端折返形成游动端. 手部执行机构中的牵引钢丝绳一端固定在下固定板上,另一端穿过SMA丝游动端固定在指尖. 牵引钢丝绳的移动距离是SMA丝游动端移动距离的2倍,作用是继续增加SMA丝行程.
图 2
2. 手指功能康复外骨骼驱动模型
2.1. 手指功能康复外骨骼运动学模型
将手指骨骼结构简化为多刚体系统,远端指骨、中节指骨、近端指骨和掌骨分别为转动副相连的刚体,如图3所示. 手指基坐标系建立在手指掌骨关节,di、Li (
图 3
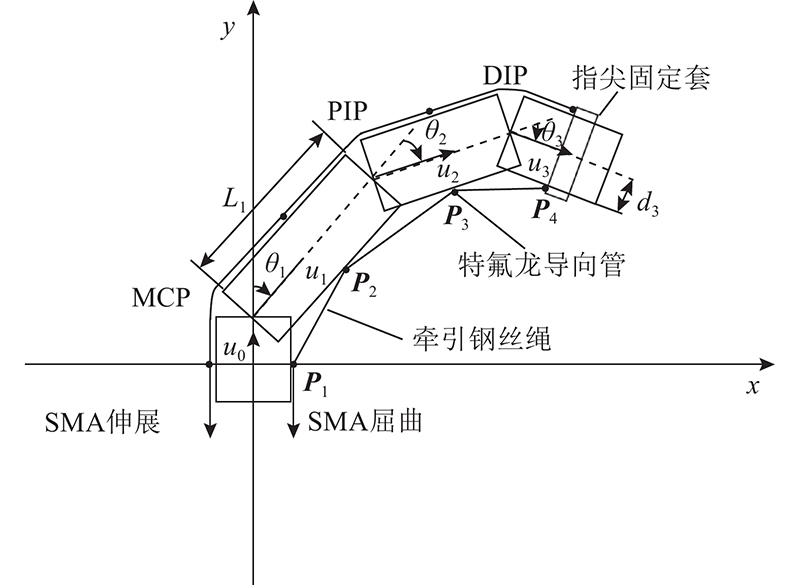
图 3 手指功能康复外骨骼运动模型
Fig.3 Finger function rehabilitation exoskeleton movement model
式中:Ri−1为手指各关节对应的旋转变换矩阵,hi为各关节方向和关节长度的乘积.
式中:R4为向量顺时针旋转90°变换矩阵. P1到P4的距离为手指屈曲的收缩距离. 当手指伸展时,将牵引钢丝绳近似为贴合手背,伸展过程所需牵引钢丝绳长度为关节绕中心点旋转的弧长. 在手指关节初始状态为0°时,屈曲和伸展所需SMA丝收缩应变为
式中,
2.2. SMA电加热模型
SMA丝采用电加热模式驱动,在固定电压下,通过调整驱动PWM脉冲的占空比来控制温度,实现对相变过程的控制. 电加热模型为
式中:
2.3. SMA相变本构模型
SMA相变过程中温度、应力、应变的关系,采用Liang-Rogers本构模型描述为
式中:
材料由奥氏体向马氏体转变的过程,即冷却过程,
式中:
2.4. SMA电阻-应变模型
SMA材料具有自感知特性,其相变过程中SMA电阻与应变有映射关系. 将SMA电阻值作为反馈信号,可以实现对SMA应变的控制. SMA电阻表示为
式中:
式中:r为SMA丝截面半径;
式中:
3. 手指功能康复外骨骼控制方法
3.1. 手指康复策略分析
根据患者参与程度的不同,可以将康复策略分为被动和主动2种方式[17]. 被动方式下的手部运动完全由机器人引导来实现预定轨迹;在主动方式下手部实现轨迹运动或特定动作的过程中,机器人提供协助或阻抗力. 无论是连续被动活动康复疗法(CPM),还是机器人主动辅助训练疗法(RAAE),机器人辅助康复外骨骼结构对手指的作用都是保持手指的特定位姿. 手功能康复外骨骼的控制策略基于SMA电阻值-应变-手指弯曲角度的映射关系,控制手指达到特定弯曲角度并保持角度不变,适应手指康复需求.
3.2. 模糊神经网络PID控制器设计
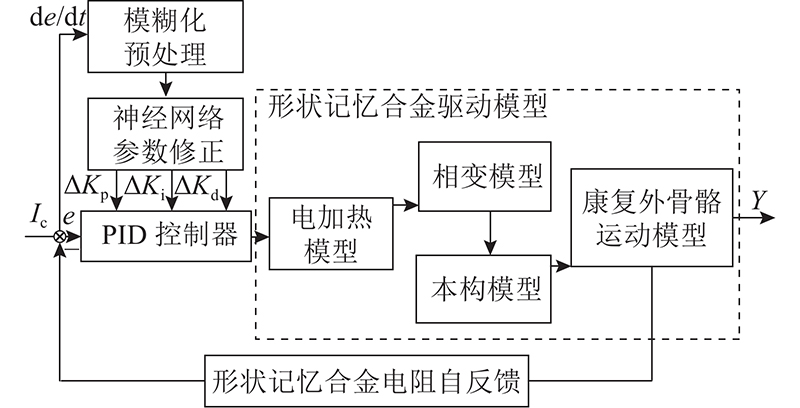
SMA材料形变过程中的非线性迟滞问题使得传统PID控制算法不能很好地实现位置控制[18]. 为此,引入如图4所示的模糊神经网络自适应算法优化PID控制参数. 外骨骼装置为单路控制,每个控制单元控制1根SMA丝,采用扩充响应曲线法确定PID的初始参数
图 4
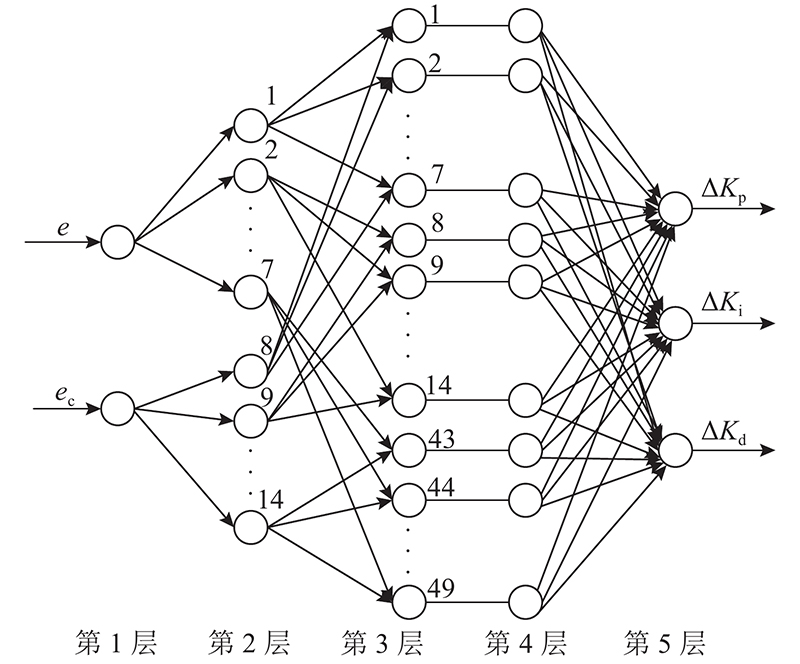
如图5所示为针对手指功能康复外骨骼设计的模糊神经网络PID网络结构,由输入层(第1层)、隶属函数层(第2层)、模糊推理层(第3层)、归一化层(第4层)和输出层(第5层)组成. 通过模式顺传播和误差逆传播过程修正PID的3个参数:
图 5
式中:
图 6
在误差逆传播过程中,定义评价期望输出值与实际计算值的损失函数为
式中:d1为期望值,y1为实际输入值. 经过从第5层到第1层的逐层偏导计算,得到隶属度函数中心值、宽度的一阶梯度为
经计算后得到函数中心与梯度的一阶偏导,其参数修正的学习方法表示为
式中:z为网络训练迭代次数;
3.3. 手指功能康复外骨骼控制系统设计
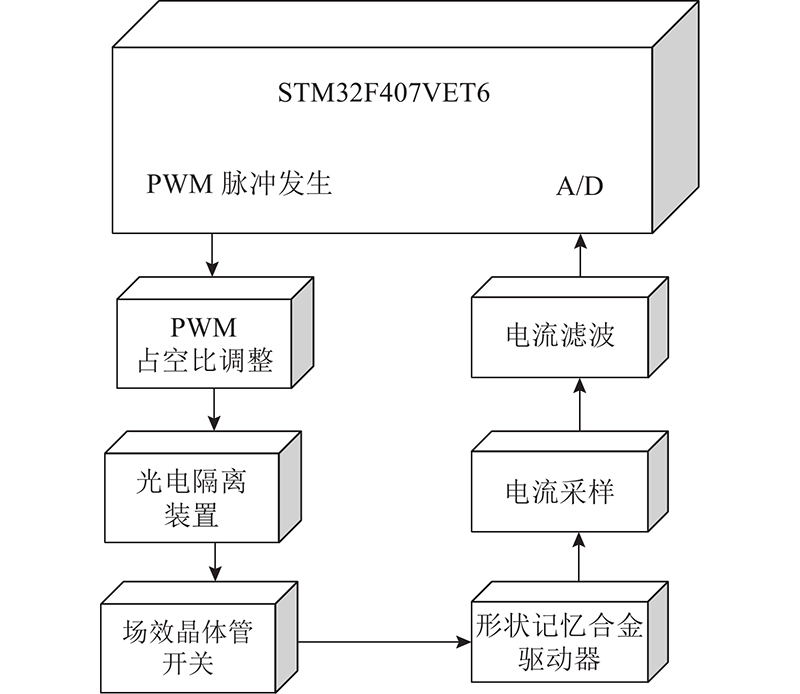
手指功能康复外骨骼控制系统总体结构由控制系统和测量系统2个部分组成,其中控制系统选取STM32F407VET6作为微控制单元(microcontroller unit,MCU),如图7所示. 通过复用内部定时器产生6路可调节PWM脉冲信号. PWM脉冲信号经过光耦后作用于场效晶体管(MOSFET),驱动SMA丝,通过控制算法调整PWM占空比实现对SMA丝应变的控制. 电流采样电路与SMA丝串联,采集到的电流信号经过中位值滤波处理,进行A/D转换后将电流信号转换为相应的电阻值,通过串口通信记录在计算机中. 基于SMA丝电阻和应变量的对应关系,STM32将电阻作为反馈量,经常规PID和模糊神经网络PID控制运算后调整PWM占空比,实现对SMA丝的闭环控制,模糊神经网络PID采取离线训练模式,完成对手指功能康复外骨骼弯曲角度的控制.
图 7
4. 实验结果与分析
4.1. 实验装置及实验条件
如图8所示为手指功能康复外骨骼样机. SMA驱动装置由上下固定板和前(后)导丝块螺钉连接. 上下固定板选用铝合金薄板,前(后)导丝块由耐高温光敏树脂3D打印而成. SMA材料的应变率按4%计算,结合式(7)、(8),确定单根SMA丝长度为1330 mm,SMA具体参数如表1所示. 选用棉线手套作为外骨骼基体,将特氟龙导向管固定在各段指骨中间位置,选用直径为0.5 mm的304钢丝作为牵引装置. 为了保证手指康复训练试验符合实际,实验中用人手模型进行测试. Mondal等[19]的研究表明,以正常成年人食指为例,手指在不同工作情况下各关节约束力范围如下:远端指节关节的约束力为0~10.5 N,近端指节关节的约束力为0~19.4 N,掌指关节的约束力为0~24 N. 在忽略人手模型关节摩擦力的情况下,在DIP和PIP固定线径为0.3 mm,外径为0.6 mm,3匝的碳素弹簧钢扭簧的最大扭力为12 N. 掌指关节固定线径为0.4 mm,外径为0.8 mm,350 mm长的304不锈钢弹簧的最大扭力为16 N. 本研究均采用该人手模型进行试验,避免人体手指主动发力对试验结果带来干扰.
图 8
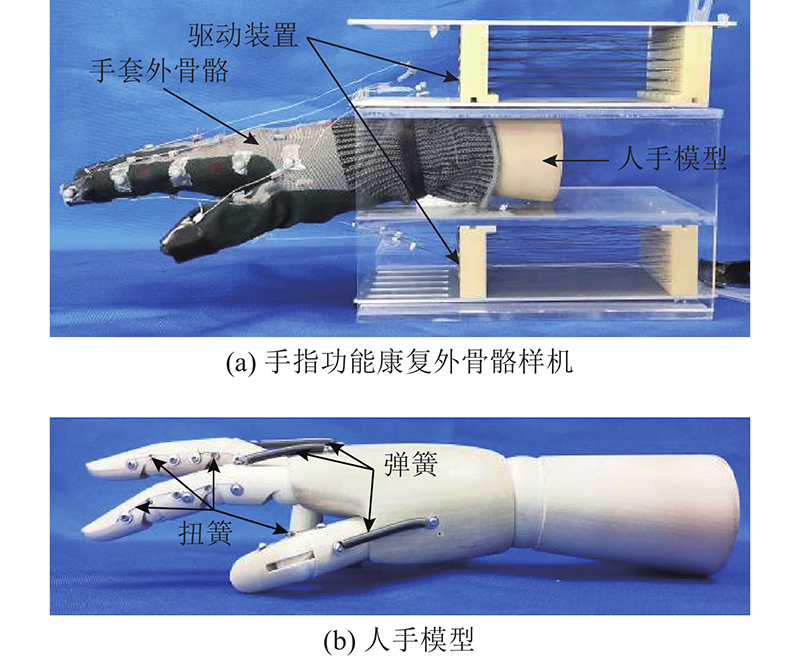
表 1 形状记忆合金的相关参数
Tab.1
| 参数 | 数值 | 参数 | 数值 | |
| | 6.5×103 | | 109.5 | |
| | 1000 | | 27×109 | |
| | 0.3 | | 65×109 | |
| | 25 | | 5.5×105 | |
| | 870 | | −1.12 | |
| | 61.1 | | 880 | |
| | 34.5 | | 16 | |
| | 69.3 | — | — |
实验装置包括泰信APS3005S可编程直流电源、PC机、MCU核心板、驱动板、手指功能康复外骨骼样机,如图9所示. 手指康复外骨骼关运动测量采用Vicon运动捕捉装置,在手指上各个关节处粘贴高反光率的记号点,采集手指的空间运动. 实验环境温度为25 ℃,电源输出设定为直流恒压24 V,PWM脉冲频率设定为50 Hz.
图 9
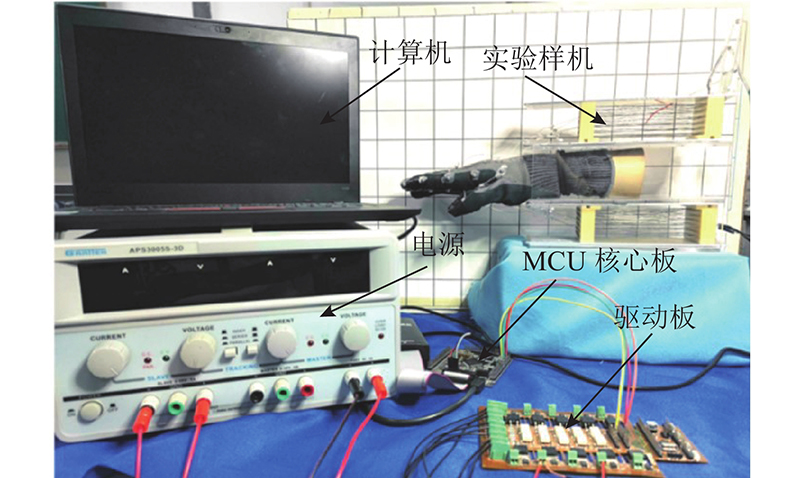
图 9 手指功能康复外骨骼控制实验装置
Fig.9 Finger functional rehabilitation exoskeleton control experimental device
4.2. 手指功能康复外骨骼样机性能实验
对手指功能康复外骨骼样机的运动性能和抓握性能进行实验. 满功率电加热SMA丝驱动外骨骼结构带动手指弯曲,使用Vicon系统测量和记录手指弯曲角度变化,并与理论计算值进行对比,如图10示. 图中,
图 10
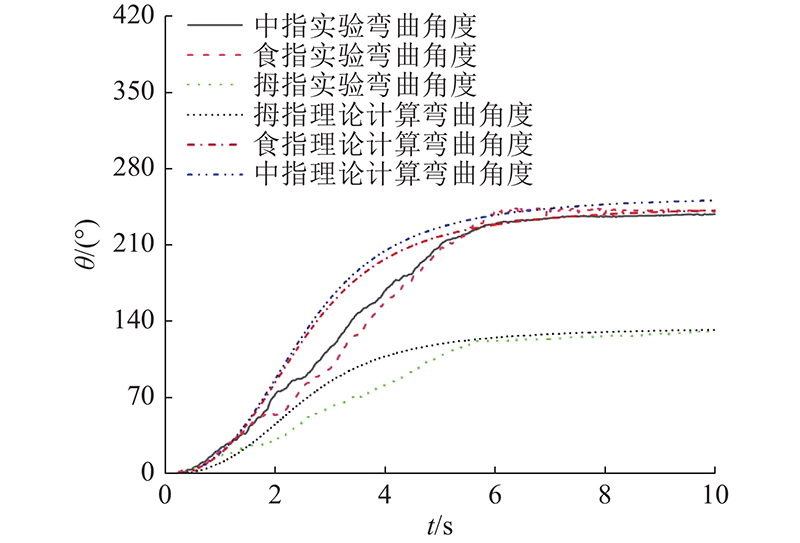
图 10 手指功能康复外骨骼三指角度变化
Fig.10 Finger function rehabilitation exoskeleton three-finger angle change
表 2 健康人手和手功能康复外骨骼最大弯曲角度
Tab.2
| 手指 | | |
| 拇指 | 130.5 | 150 |
| 食指 | 236.4 | 265 |
| 中指 | 242.5 | 270 |
为了研究康复外骨骼与手指配合进行日常活动的性能,选择质量为20~200 g的圆柱体、长方体和柔软织物为实验对象,测试样机的抓握性能,实验结果图像如图11所示. 实验结果表明,手指功能康复外骨骼能够较好地辅助手指完成日常抓握动作.
图 11
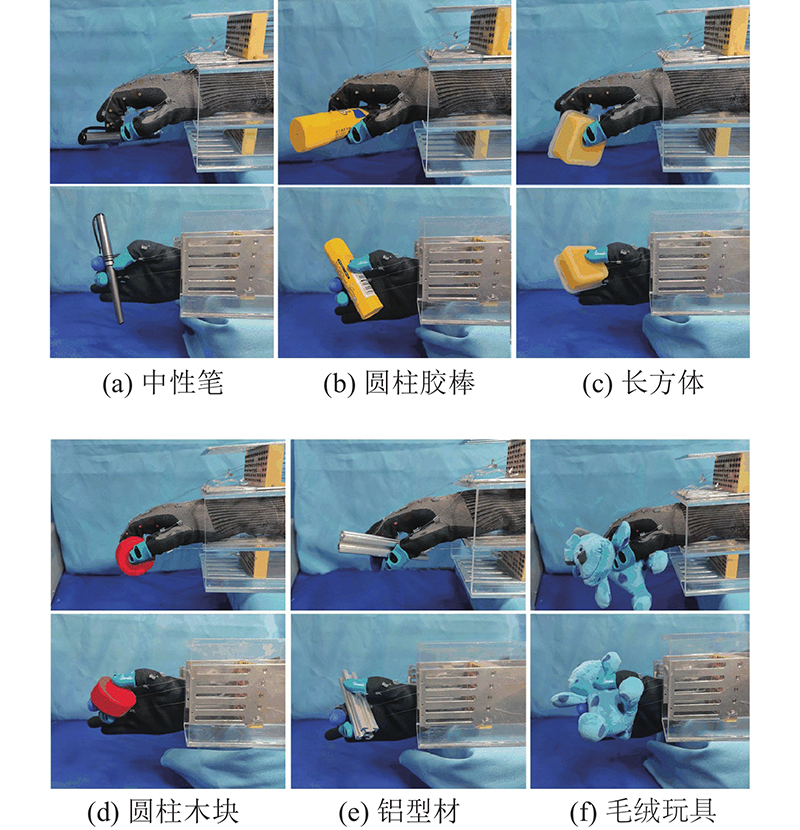
图 11 手指功能康复外骨骼辅助抓握试验
Fig.11 Finger function rehabilitation exoskeleton assisted grasping test
4.3. 手指功能康复外骨骼位置控制实验
以食指为研究对象,选定总弯曲角度为70°(小幅度)、135°(中幅度)、200°(大幅度)作为实验参数,进行手指康复弯曲角度的控制效果实验. 测得食指小、中、大幅度弯曲对应的SMA丝电阻值分别为32.0、28.0、24.5 Ω. 如图12所示,采用基于电阻反馈的模糊神经网络PID,控制食指实现中幅度弯曲运动,手指弯曲角度随着通电时间的增加而增加,各个指关节能够协调运动,手指总弯曲角度最终稳定在(135±1)°.
图 12
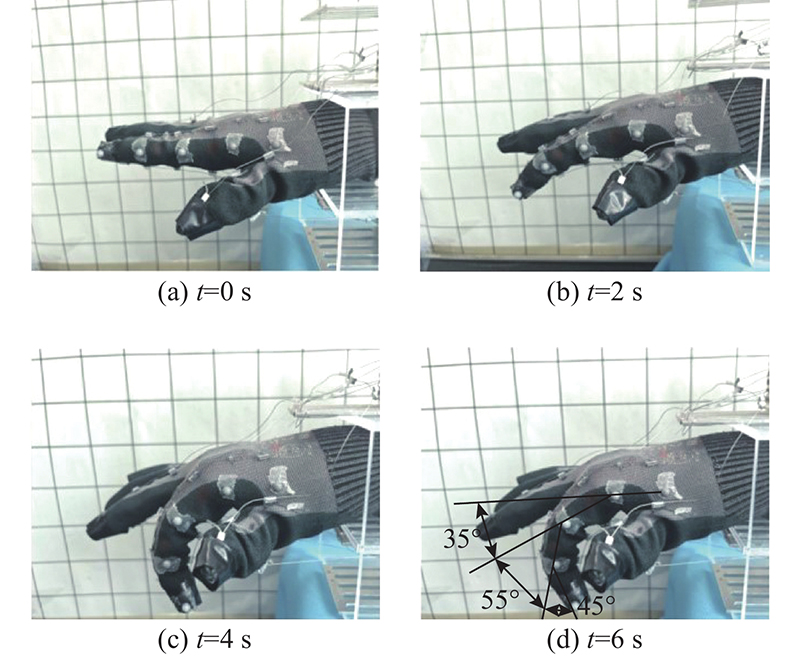
图 12 食指中幅度弯曲运动序列图
Fig.12 Sequence diagram of middle amplitude bending movement of index finger
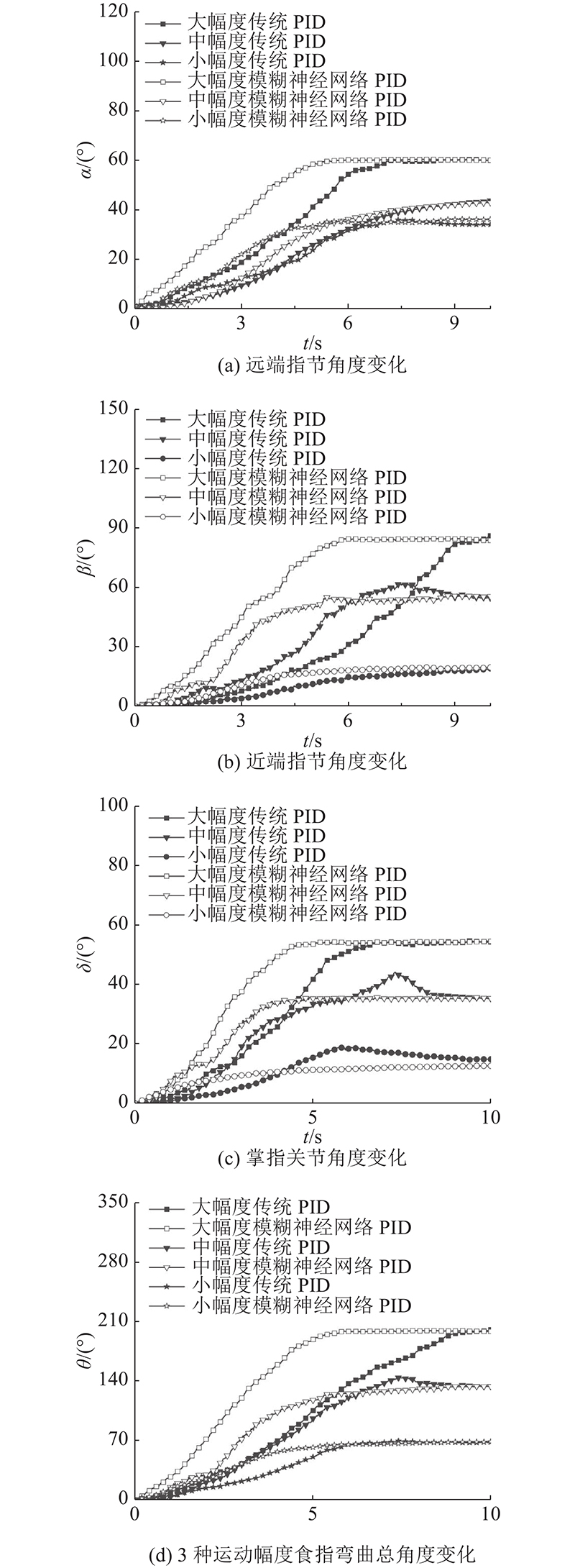
对比分析基于电阻反馈的模糊神经网络PID和传统PID控制对手指功能康复外骨骼的控制效果,如图13所示. 图中,
图 13
手指康复训练中,手指的弯曲幅度需要随时变化以满足患者不同的康复需求. 以食指从小幅度到中幅度的切换为例,对比分析2种算法的控制效果,如图14所示. 可以看出,模糊神经网络PID在幅值切换过程中相比传统PID的响应时间缩短1.2 s,到达期望角度的时间缩短2 s,上升过程更加平稳,具有更小的稳态误差. 手指运动康复训练进行手指的屈曲、伸展周期运动的目的是让患者恢复肌肉自主运动能力. 通过手指康复机器人内外侧SMA丝的交替通电加热,完成手指功能康复外骨骼的往复运动. 以食指弯曲总角度200°作为弯曲极限位置,实验结果如图15所示. 可以看出,模糊神经网络PID屈曲伸展周期为10 s,传统PID屈曲伸展周期为12.5 s. 相比传统PID控制,模糊神经网络PID在控制运动过程中手指角度变化更平稳,响应时间更短,满足医疗研究最佳康复频率5~6次/min的要求.
图 14
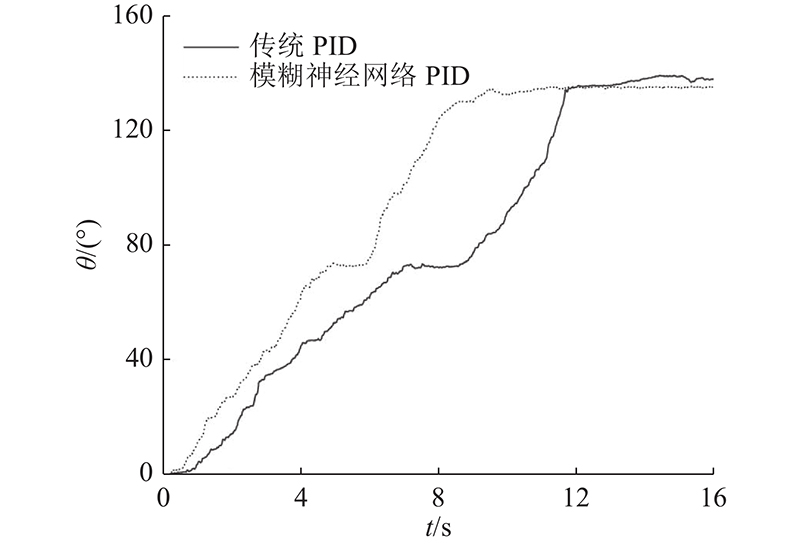
图 14 手指功能康复外骨骼幅值转换角度变化
Fig.14 Finger functional rehabilitation exoskeleton amplitude conversion angle change
图 15
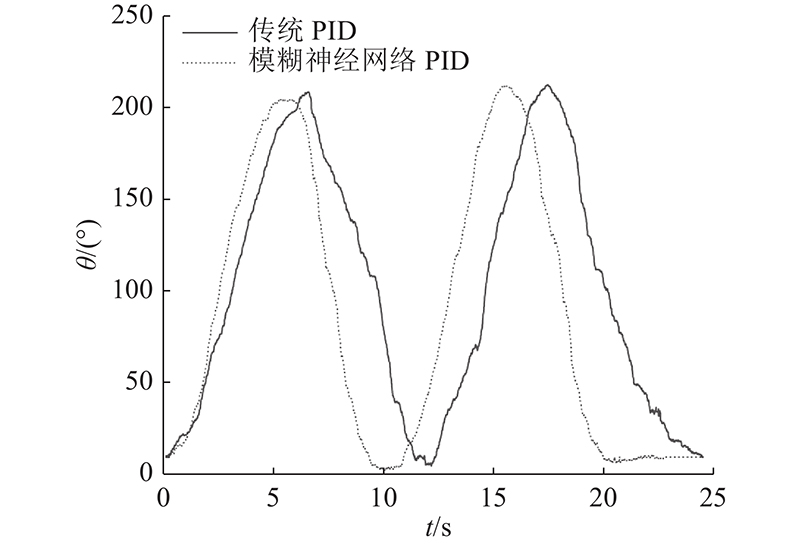
图 15 手指功能康复外骨骼周期运动角度变化
Fig.15 Finger function rehabilitation exoskeleton cycle movement angle changes
5. 结 语
本研究分析手指骨骼、肌腱、和肌肉的协调运动机制,基于功能仿生原理,设计SMA丝驱动的手指功能康复外骨骼结构,构建外骨骼运动模型和SMA丝电加热驱动模型,提出基于电阻反馈的手指功能康复外骨骼模糊神经网络PID控制方法. 样机实验结果表明,手指功能康复外骨骼能够实现手指的被动康复运动,拇指、食指和中指的最大手指弯曲角度分别为130.5°、236.4°、242.5°;基于电阻反馈的模糊神经网络PID与传统PID控制相比,具有更快的响应和更小的稳态误差. 研究为轻便型可穿戴手功能康复机器人研究提供了有效方案. 后续研究将进一步优化驱动装置,构建外骨骼样机的人机耦合动力学模型,分析抓握载荷变化规律,提升装置的集成度和穿戴舒适性. 此外,还将进一步研究影响手指康复外骨骼周期运动的影响因素,探索适应不同患者的康复策略和控制方法.
参考文献
脑中风“年轻化”敲警钟
[J].
Stroke "young" to sound the alarm
[J].
Mechanical design and analysis of the end-effector finger rehabilitation robot (EFRR) for stroke patients
[J].DOI:10.3390/machines9060110 [本文引用: 1]
手指拔伸扳法对脑卒中后早期手功能障碍的康复效果
[J].DOI:10.16780/j.cnki.sjssgncj.20190420 [本文引用: 1]
Effect of finger pulling and stretching trigger method on the rehabilitation of early hand dysfunction after stroke
[J].DOI:10.16780/j.cnki.sjssgncj.20190420 [本文引用: 1]
An experimental investigation on shape memory alloy dynamic splint for a finger joint application
[J].DOI:10.1016/j.sna.2011.11.012 [本文引用: 1]
柔性膝关节保护外骨骼及其行走助力方法设计
[J].
Design of flexible knee-joint protection exoskeleton and walking assistance method
[J].
Exo-Glove Poly II: a polymer-based soft wearable robot for the hand with a tendon-driven actuation system
[J].DOI:10.1089/soro.2018.0006 [本文引用: 1]
Design and characterization of a lightweight and fully portable remote actuation system for use with a hand exoskeleton
[J].DOI:10.1109/LRA.2016.2528296 [本文引用: 1]
形状记忆合金丝驱动的柔性机械臂建模与实验
[J].
Modeling and experiment of flexible manipulator actuated by shape memory alloy wire
[J].
形状记忆合金力学行为与应用综述
[J].DOI:10.19636/j.cnki.cjsm42-1250/o3.2021.028 [本文引用: 1]
A review of shape memory alloys: mechanical behavior and application
[J].DOI:10.19636/j.cnki.cjsm42-1250/o3.2021.028 [本文引用: 1]
Biomimetic design of an ultra-compact and light-weight soft muscle glove
[J].DOI:10.1007/s11740-017-0767-y [本文引用: 1]
ASR glove: a wearable glove for hand assistance and rehabilitation using shape memory alloys
[J].
Applications of shape memory alloys for neurology and neuromuscular rehabilitation
[J].DOI:10.3390/jfb6020328 [本文引用: 1]
Implementation of various control algorithms for hand rehabilitation exercise using wearable robotic hand
[J].DOI:10.1007/s11370-013-0135-5 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}