式中: $F\left( {t,\,{x_1},\,{x_2},\,{{\hat x}_2}} \right) \,=\, f\left( {t,\,{x_1},\,{x_2},\,u} \right) - f\left( {t,\,{x_1},\,{{\hat x}_2},\,u} \right)\,+ \zeta ( {t,{x_1},{x_2}},$ y )
[1]
李汉杰. 基于相平面分析的车辆操纵稳定性控制研究[D]. 合肥: 合肥工业大学, 2018: 40−68.
[本文引用: 1]
LI Han-jie. Research on handing stability control of vehicle based on phase plane analysis [D]. Hefei: Hefei University of Technology, 2018: 40−68.
[本文引用: 1]
[2]
WU J, CHENG S, LIU B, et al A human-machine-cooperative-driving controller based on AFS and DYC for vehicle dynamic stability
[J]. Energies , 2017 , 10 (11 ): 1737
DOI:10.3390/en10111737
[本文引用: 2]
[3]
田晨. 基于卡尔曼滤波的AFS和DYC协调控制[D]. 长沙: 湖南大学, 2017: 40-54.
[本文引用: 1]
TIAN Chen. Research on integrated control strategy of active front steering and direct yaw control based on the Kalman filter [D]. Changsha: Hunan University, 2017: 40-54.
[本文引用: 1]
[4]
杜松. 某轿车主动制动与主动转向相平面协调控制研究[D]. 长春: 吉林大学, 2015: 23-40.
[本文引用: 1]
DU Song. The research on phase plane vehicle coordination control of active front steering and active braking [D]. Changchun: Jilin University, 2015: 23-40
[本文引用: 1]
[5]
INAGAKI S, KUSHIRO I, YAMAMOTO M Analysis on vehicle stability in critical cornering using phase plane method
[J]. JSAE Review , 1995 , 16 (2 ): 287 - 292
[本文引用: 1]
[6]
刘飞, 熊璐, 邓律华, 等 基于相平面法的车辆行驶稳定性判定方法
[J]. 华南理工大学学报:自然科学版 , 2014 , 42 (11 ): 63 - 70
[本文引用: 1]
LIU Fei, XIONG Lu, DENG Lu-hua, et al Vehicle stability criterion based on phase plane method
[J]. Journal of South China University of Technology: Natural Science Edition , 2014 , 42 (11 ): 63 - 70
[本文引用: 1]
[8]
HE J, CROLLA D A, LEVESLEY M C, et al Coordination of active steering, driveline, and braking for integrated vehicle dynamics control
[J]. Journal of Automobile Engineering , 2006 , 220 (10 ): 1401 - 1421
DOI:10.1243/09544070JAUTO265
[本文引用: 1]
[9]
KOIBUCHI K, YAMAMOTO M, FUKADA Y, et al. Vehicle stability control in limit cornering by active brake [R]. [S.l.]: SAE International, 1996.
[本文引用: 1]
[10]
熊璐, 曲彤, 冯源, 等 极限工况下车辆行驶的稳定性判据
[J]. 机械工程学报 , 2015 , 51 (10 ): 103 - 111
DOI:10.3901/JME.2015.10.103
[本文引用: 1]
XIONG Lu, QU Tong, FENG Yuan, et al Stability criterion for the vehicle under critical driving situation
[J]. Journal of Mechanical Engineering , 2015 , 51 (10 ): 103 - 111
DOI:10.3901/JME.2015.10.103
[本文引用: 1]
[11]
PACEJKA H B. Tyre factors and vehicle handling [J] International Journal of Vehicle Design , 1979, 1(1): 1−23.
[本文引用: 1]
[12]
DI CAIRANO S, TSENG H E, BERNARDINIY D, et al Vehicle yaw stability control by coordinated active front steering and differential braking in the tire sideslip angles domain
[J]. IEEE Transactions on Control Systems Technology , 2013 , 21 (4 ): 1236 - 1248
DOI:10.1109/TCST.2012.2198886
[本文引用: 1]
[13]
BERNARDINIY D, DI CAIRANOZ S, BEMPORAD A, et al. Drive-by-wire vehicle stabilization and yaw regulation: a hybrid model predictive control design [C]// Proceedings of the 48th IEEE Conference on Decision and Control. Shanghai: IEEE, 2009: 7621−7626.
[本文引用: 1]
[15]
PACEJKA H B. Tire and vehicle dynamics [M]. 3rd ed. [S.l.]: Butterworth-Heinemann, 2012.
[本文引用: 1]
[16]
WU X, ZHOU B, WEN G, et al Intervention criterion and control research for active front steering with consideration of road adhesion
[J]. Vehicle System Dynamics , 2018 , 56 (4 ): 553 - 578
DOI:10.1080/00423114.2017.1395465
[本文引用: 1]
[17]
RAJAMANI R. Vehicle dynamics and control [M]. 2nd ed. [S. l.]: Springer, 2006: 201−235.
[本文引用: 1]
[18]
YOUNG K D, UTKIN V I, OZGUNER U A control engineer's guide to sliding mode control
[J]. IEEE Transactions on Control Systems Technology , 1999 , 7 (3 ): 328 - 342
DOI:10.1109/87.761053
[本文引用: 1]
[19]
UTKIN V I Variable structure systems with sliding modes
[J]. IEEE Transactions on Automatic Control , 1977 , 22 (2 ): 212 - 222
DOI:10.1109/TAC.1977.1101446
[20]
PAN S, SU H, HU X, et al. Variable structure control theory and application: a survey [C]// Proceedings of the 3rd World Congress on Intelligent Control and Automation . Hefei: IEEE, 2000: 2977−2981.
[本文引用: 1]
[21]
王曦, 王渝红, 李兴源, 等 考虑模型不确定性和时延的静止无功补偿器自适应滑模控制器设计
[J]. 物理学报 , 2014 , 63 (23 ): 238407
DOI:10.7498/aps.63.238407
[本文引用: 1]
WANG Xi, WANG Yu-hong, LI Xing-yuan, et al Design of the static var compensator adaptive sliding mode controller considering model uncertainty and time-delay
[J]. Acta Physica Sinica , 2014 , 63 (23 ): 238407
DOI:10.7498/aps.63.238407
[本文引用: 1]
[22]
张众正, 叶东, 孙兆伟 基于迭代学习观测器的卫星姿态滑模容错控制
[J]. 国防科技大学学报 , 2018 , 40 (1 ): 17 - 23
DOI:10.11887/j.cn.201801003
ZHANG Zhong-zheng, YE Dong, SUN Zhao-wei Sliding mode fault tolerant attitude control for satellite based on iterative learning observer
[J]. Journal of National University of Defense Technology , 2018 , 40 (1 ): 17 - 23
DOI:10.11887/j.cn.201801003
[23]
MA Y, ZHAO J Y, ZHAO H Y, et al Longitudinal-vertical integrated sliding mode controller for distributed electric vehicles
[J]. Science China Information Sciences , 2020 , 63 (11 ): 219201
DOI:10.1007/s11432-018-9810-4
[本文引用: 1]
[24]
SLOTINE J J, SASTRY S S Tracking control of nonlinear systems using sliding surfaces with application to robot manipulator
[J]. International Journal of Control , 1983 , 38 (2 ): 465 - 492
DOI:10.1080/00207178308933088
[本文引用: 1]
[26]
GAO W B, HUNG J C, Variable structure control of nonlinear systems: a new approach [J]. IEEE Transactions on Industrial Electronics , 1993, 40(1): 45−55.
[本文引用: 1]
[27]
李鹏. 传统和高阶滑模控制研究及其应用[D]. 长沙: 国防科学技术大学, 2011: 3−19.
[本文引用: 1]
LI Peng. Research and application of traditional and higher-order sliding mode control [D]. Changsha: National University of Defense Technology, 2011: 3−19
[本文引用: 1]
[28]
LEVANT A Sliding order and sliding accuracy in sliding mode control
[J]. International Journal of Control , 1993 , 58 (6 ): 1247 - 1263
DOI:10.1080/00207179308923053
[本文引用: 1]
[29]
孙长银, 穆朝絮, 张瑞民. 高超声速飞行器终端滑模控制技术[M]. 北京: 科学出版社, 2014: 20−60.
[本文引用: 1]
1
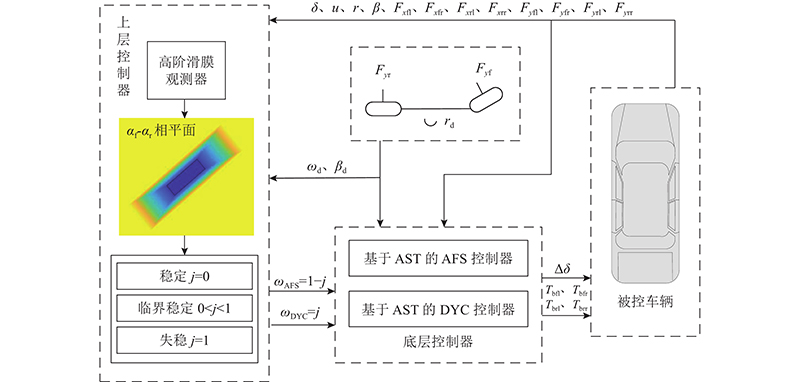
... 车辆底盘集成控制能协调子系统间的功能重叠与冲突问题,最大化挖掘子系统功能潜力. 主动前轮转向(active front steering,AFS)和直接横摆力矩控制(direct yaw moment control,DYC)是常用的底盘主动控制系统,研究二者的协同控制对提高车辆安全性和促进车辆向智能化发展具有重要意义. 由于轮胎附着椭圆效应在车辆横向稳定控制上存在耦合影响,须协调耦合区域以实现功能控制效果的最优化. 常用协调方法是根据车辆横向稳定状态制定对应的协调策略[1 ] . Wu等[2 ] 以车辆的横摆角速度和质心侧偏角作为车辆稳定性控制的目标,提出基于模型预测控制(model predictive control, MPC)的分层控制器. 该控制器上层使用二次规划最优化代价函数,下层执行器执行上层控制器的输出. Wu等[2 ] 通过在代价函数中对AFS和DYC施以不同的权重系数完成二者的协调. 该权重系数为常量,即AFS和DYC始终保持定量分配,但在不同车辆状态下,AFS和DYC的介入权重应该是不同的. 田晨[3 ] 利用无迹卡尔曼滤波算法,估计轮胎附着系数,当车辆稳定性保持超出AFS的能力极限时,由DYC提供不足的横摆力矩. 杜松[4 ] 基于相平面稳定域分析理论,划分AFS和DYC的单独工作域和共同工作域,并据此设计了二者的协调控制器. ...
1
... 车辆底盘集成控制能协调子系统间的功能重叠与冲突问题,最大化挖掘子系统功能潜力. 主动前轮转向(active front steering,AFS)和直接横摆力矩控制(direct yaw moment control,DYC)是常用的底盘主动控制系统,研究二者的协同控制对提高车辆安全性和促进车辆向智能化发展具有重要意义. 由于轮胎附着椭圆效应在车辆横向稳定控制上存在耦合影响,须协调耦合区域以实现功能控制效果的最优化. 常用协调方法是根据车辆横向稳定状态制定对应的协调策略[1 ] . Wu等[2 ] 以车辆的横摆角速度和质心侧偏角作为车辆稳定性控制的目标,提出基于模型预测控制(model predictive control, MPC)的分层控制器. 该控制器上层使用二次规划最优化代价函数,下层执行器执行上层控制器的输出. Wu等[2 ] 通过在代价函数中对AFS和DYC施以不同的权重系数完成二者的协调. 该权重系数为常量,即AFS和DYC始终保持定量分配,但在不同车辆状态下,AFS和DYC的介入权重应该是不同的. 田晨[3 ] 利用无迹卡尔曼滤波算法,估计轮胎附着系数,当车辆稳定性保持超出AFS的能力极限时,由DYC提供不足的横摆力矩. 杜松[4 ] 基于相平面稳定域分析理论,划分AFS和DYC的单独工作域和共同工作域,并据此设计了二者的协调控制器. ...
A human-machine-cooperative-driving controller based on AFS and DYC for vehicle dynamic stability
2
2017
... 车辆底盘集成控制能协调子系统间的功能重叠与冲突问题,最大化挖掘子系统功能潜力. 主动前轮转向(active front steering,AFS)和直接横摆力矩控制(direct yaw moment control,DYC)是常用的底盘主动控制系统,研究二者的协同控制对提高车辆安全性和促进车辆向智能化发展具有重要意义. 由于轮胎附着椭圆效应在车辆横向稳定控制上存在耦合影响,须协调耦合区域以实现功能控制效果的最优化. 常用协调方法是根据车辆横向稳定状态制定对应的协调策略[1 ] . Wu等[2 ] 以车辆的横摆角速度和质心侧偏角作为车辆稳定性控制的目标,提出基于模型预测控制(model predictive control, MPC)的分层控制器. 该控制器上层使用二次规划最优化代价函数,下层执行器执行上层控制器的输出. Wu等[2 ] 通过在代价函数中对AFS和DYC施以不同的权重系数完成二者的协调. 该权重系数为常量,即AFS和DYC始终保持定量分配,但在不同车辆状态下,AFS和DYC的介入权重应该是不同的. 田晨[3 ] 利用无迹卡尔曼滤波算法,估计轮胎附着系数,当车辆稳定性保持超出AFS的能力极限时,由DYC提供不足的横摆力矩. 杜松[4 ] 基于相平面稳定域分析理论,划分AFS和DYC的单独工作域和共同工作域,并据此设计了二者的协调控制器. ...
... [2 ]通过在代价函数中对AFS和DYC施以不同的权重系数完成二者的协调. 该权重系数为常量,即AFS和DYC始终保持定量分配,但在不同车辆状态下,AFS和DYC的介入权重应该是不同的. 田晨[3 ] 利用无迹卡尔曼滤波算法,估计轮胎附着系数,当车辆稳定性保持超出AFS的能力极限时,由DYC提供不足的横摆力矩. 杜松[4 ] 基于相平面稳定域分析理论,划分AFS和DYC的单独工作域和共同工作域,并据此设计了二者的协调控制器. ...
1
... 车辆底盘集成控制能协调子系统间的功能重叠与冲突问题,最大化挖掘子系统功能潜力. 主动前轮转向(active front steering,AFS)和直接横摆力矩控制(direct yaw moment control,DYC)是常用的底盘主动控制系统,研究二者的协同控制对提高车辆安全性和促进车辆向智能化发展具有重要意义. 由于轮胎附着椭圆效应在车辆横向稳定控制上存在耦合影响,须协调耦合区域以实现功能控制效果的最优化. 常用协调方法是根据车辆横向稳定状态制定对应的协调策略[1 ] . Wu等[2 ] 以车辆的横摆角速度和质心侧偏角作为车辆稳定性控制的目标,提出基于模型预测控制(model predictive control, MPC)的分层控制器. 该控制器上层使用二次规划最优化代价函数,下层执行器执行上层控制器的输出. Wu等[2 ] 通过在代价函数中对AFS和DYC施以不同的权重系数完成二者的协调. 该权重系数为常量,即AFS和DYC始终保持定量分配,但在不同车辆状态下,AFS和DYC的介入权重应该是不同的. 田晨[3 ] 利用无迹卡尔曼滤波算法,估计轮胎附着系数,当车辆稳定性保持超出AFS的能力极限时,由DYC提供不足的横摆力矩. 杜松[4 ] 基于相平面稳定域分析理论,划分AFS和DYC的单独工作域和共同工作域,并据此设计了二者的协调控制器. ...
1
... 车辆底盘集成控制能协调子系统间的功能重叠与冲突问题,最大化挖掘子系统功能潜力. 主动前轮转向(active front steering,AFS)和直接横摆力矩控制(direct yaw moment control,DYC)是常用的底盘主动控制系统,研究二者的协同控制对提高车辆安全性和促进车辆向智能化发展具有重要意义. 由于轮胎附着椭圆效应在车辆横向稳定控制上存在耦合影响,须协调耦合区域以实现功能控制效果的最优化. 常用协调方法是根据车辆横向稳定状态制定对应的协调策略[1 ] . Wu等[2 ] 以车辆的横摆角速度和质心侧偏角作为车辆稳定性控制的目标,提出基于模型预测控制(model predictive control, MPC)的分层控制器. 该控制器上层使用二次规划最优化代价函数,下层执行器执行上层控制器的输出. Wu等[2 ] 通过在代价函数中对AFS和DYC施以不同的权重系数完成二者的协调. 该权重系数为常量,即AFS和DYC始终保持定量分配,但在不同车辆状态下,AFS和DYC的介入权重应该是不同的. 田晨[3 ] 利用无迹卡尔曼滤波算法,估计轮胎附着系数,当车辆稳定性保持超出AFS的能力极限时,由DYC提供不足的横摆力矩. 杜松[4 ] 基于相平面稳定域分析理论,划分AFS和DYC的单独工作域和共同工作域,并据此设计了二者的协调控制器. ...
1
... 车辆底盘集成控制能协调子系统间的功能重叠与冲突问题,最大化挖掘子系统功能潜力. 主动前轮转向(active front steering,AFS)和直接横摆力矩控制(direct yaw moment control,DYC)是常用的底盘主动控制系统,研究二者的协同控制对提高车辆安全性和促进车辆向智能化发展具有重要意义. 由于轮胎附着椭圆效应在车辆横向稳定控制上存在耦合影响,须协调耦合区域以实现功能控制效果的最优化. 常用协调方法是根据车辆横向稳定状态制定对应的协调策略[1 ] . Wu等[2 ] 以车辆的横摆角速度和质心侧偏角作为车辆稳定性控制的目标,提出基于模型预测控制(model predictive control, MPC)的分层控制器. 该控制器上层使用二次规划最优化代价函数,下层执行器执行上层控制器的输出. Wu等[2 ] 通过在代价函数中对AFS和DYC施以不同的权重系数完成二者的协调. 该权重系数为常量,即AFS和DYC始终保持定量分配,但在不同车辆状态下,AFS和DYC的介入权重应该是不同的. 田晨[3 ] 利用无迹卡尔曼滤波算法,估计轮胎附着系数,当车辆稳定性保持超出AFS的能力极限时,由DYC提供不足的横摆力矩. 杜松[4 ] 基于相平面稳定域分析理论,划分AFS和DYC的单独工作域和共同工作域,并据此设计了二者的协调控制器. ...
1
... 车辆底盘集成控制能协调子系统间的功能重叠与冲突问题,最大化挖掘子系统功能潜力. 主动前轮转向(active front steering,AFS)和直接横摆力矩控制(direct yaw moment control,DYC)是常用的底盘主动控制系统,研究二者的协同控制对提高车辆安全性和促进车辆向智能化发展具有重要意义. 由于轮胎附着椭圆效应在车辆横向稳定控制上存在耦合影响,须协调耦合区域以实现功能控制效果的最优化. 常用协调方法是根据车辆横向稳定状态制定对应的协调策略[1 ] . Wu等[2 ] 以车辆的横摆角速度和质心侧偏角作为车辆稳定性控制的目标,提出基于模型预测控制(model predictive control, MPC)的分层控制器. 该控制器上层使用二次规划最优化代价函数,下层执行器执行上层控制器的输出. Wu等[2 ] 通过在代价函数中对AFS和DYC施以不同的权重系数完成二者的协调. 该权重系数为常量,即AFS和DYC始终保持定量分配,但在不同车辆状态下,AFS和DYC的介入权重应该是不同的. 田晨[3 ] 利用无迹卡尔曼滤波算法,估计轮胎附着系数,当车辆稳定性保持超出AFS的能力极限时,由DYC提供不足的横摆力矩. 杜松[4 ] 基于相平面稳定域分析理论,划分AFS和DYC的单独工作域和共同工作域,并据此设计了二者的协调控制器. ...
Analysis on vehicle stability in critical cornering using phase plane method
1
1995
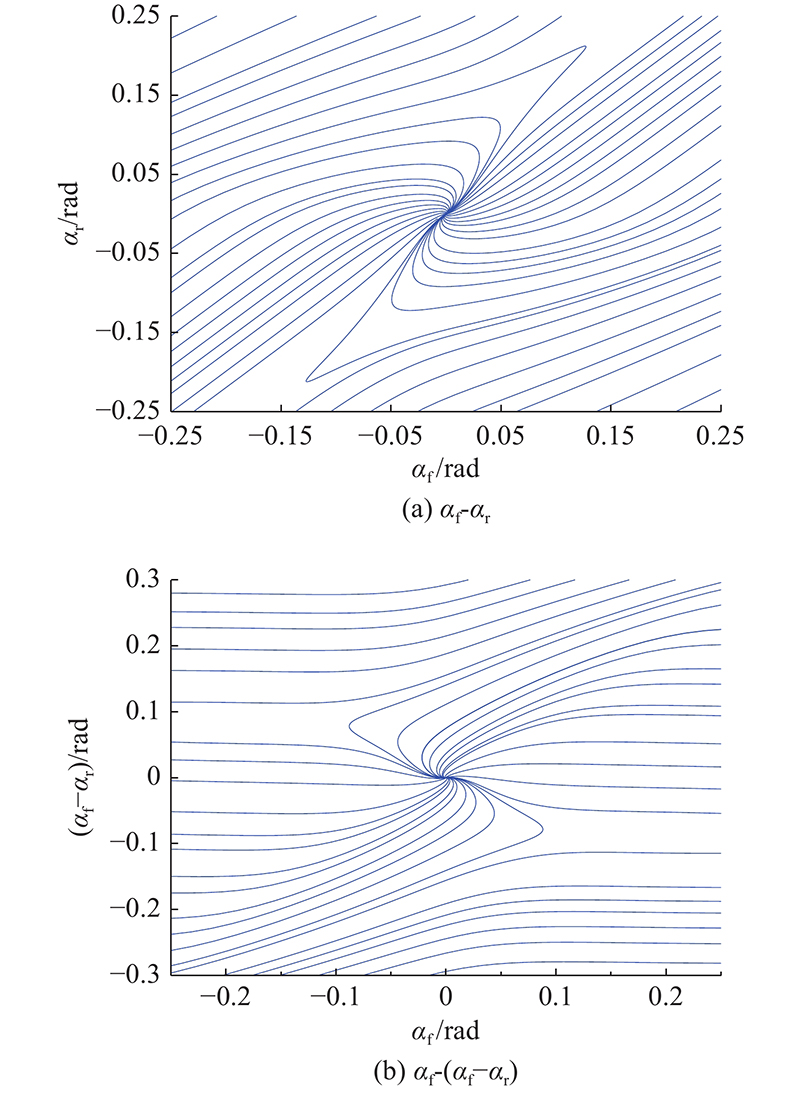
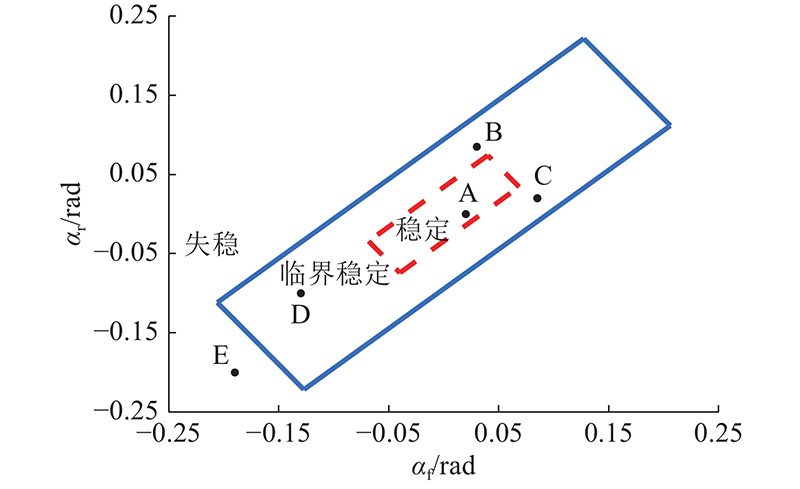
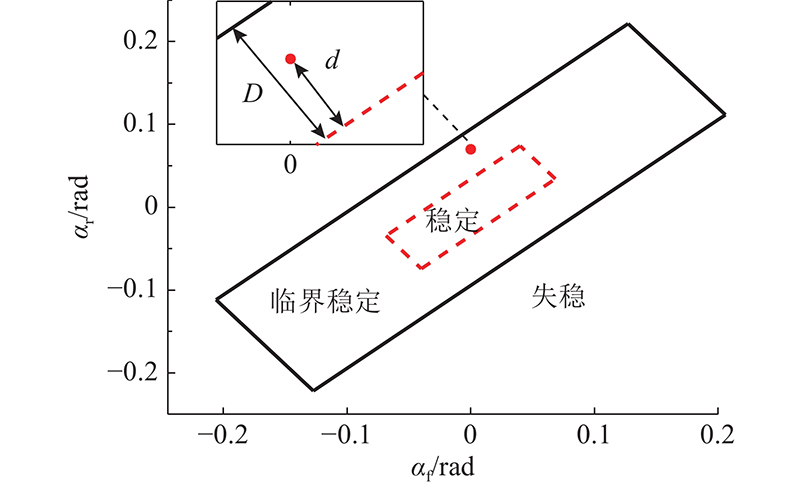
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
基于相平面法的车辆行驶稳定性判定方法
1
2014
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
基于相平面法的车辆行驶稳定性判定方法
1
2014
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
Coordination of active steering, driveline, and braking for integrated vehicle dynamics control
1
2006
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
1
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
极限工况下车辆行驶的稳定性判据
1
2015
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
极限工况下车辆行驶的稳定性判据
1
2015
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
1
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
Vehicle yaw stability control by coordinated active front steering and differential braking in the tire sideslip angles domain
1
2013
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
1
... 相平面法[5 ] 作为判断车辆横向稳定状态的经典方法,已有较深入的研究和广泛的应用. 该方法主要以质心侧偏角及其变化率、横摆角速度作为车辆横向稳定状态的表征量,多采用双直线、双折线、菱形[6 -8 ] 等对相平面进行区域划分. Koibuchi等[9 ] 提出用双线法表示相平面β -dβ 的稳定边界,并给出边界公式. 熊璐等[10 ] 选取相平面β −dβ 分析车辆行驶的稳定性,提出改进的五参数菱形法确定车辆状态稳定区域,作为基于非线性车辆模型的稳定性判据. 改进划分方式,实质是进一步剔除非稳定区域,大多数稳定判据将车辆状态分为稳定和失稳,未考虑介于稳定与失稳间的临界状态. Pacejka[11 ] 提出以前轮侧偏角α f 、后轮侧偏角α r 作为表征量,通过分析二者的相轨迹来研究车辆横向稳定性. Di Cairano等[12 -13 ] 使用近似模拟轮胎力特性的分段线性轮胎模型,依据相平面相关理论建立α f -α r 相平面,分析车辆在相平面内的横向稳定性. ...
Vehicle handling improvement by active steering
1
2002
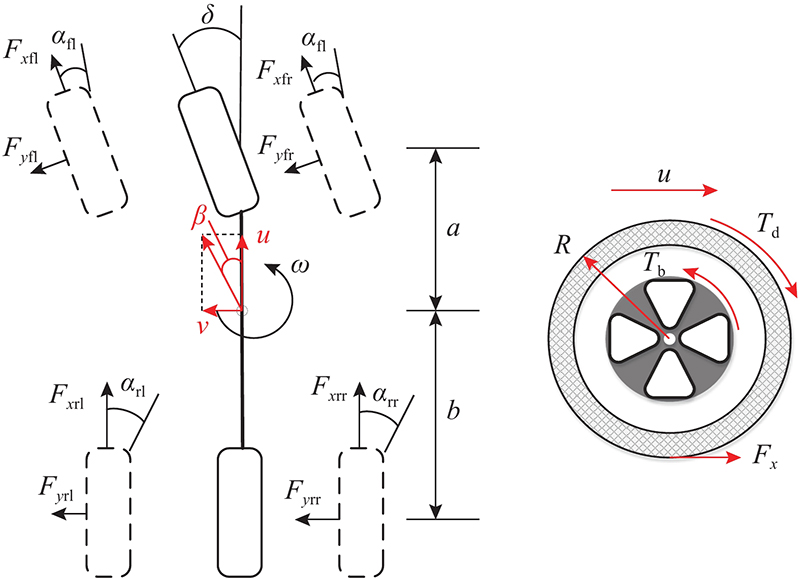
... 轮胎模型是车辆模型的关键之一,它反映了不同附着路面、不同车辆状态下地面对车辆作用力的特点. 常用的轮胎模型有线性轮胎模型、联合轮胎模型、魔术公式轮胎模型等. 魔术公式轮胎模型基于试验数据,不仅在试验范围保持高精度,在超过极限值一定程度的情况下仍可使用,在有限工况下外推的置信度较好. 考虑到不同路面附着系数对轮胎侧向力的影响[14 ] ,本研究以魔术公式轮胎模型作为被控车辆的轮胎模型,模型的纵、侧向力表达式分别为 ...
1
... 当轮胎处于转向加制动联合工况时,轮胎的纵向力和侧向力应限制在附着椭圆上,考虑滑移率和侧偏角的轮胎模型表达式[15 ] 为 ...
Intervention criterion and control research for active front steering with consideration of road adhesion
1
2018
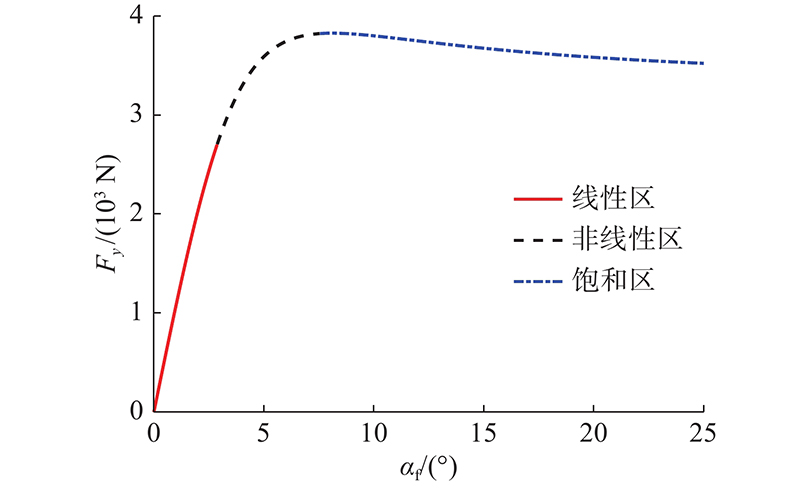
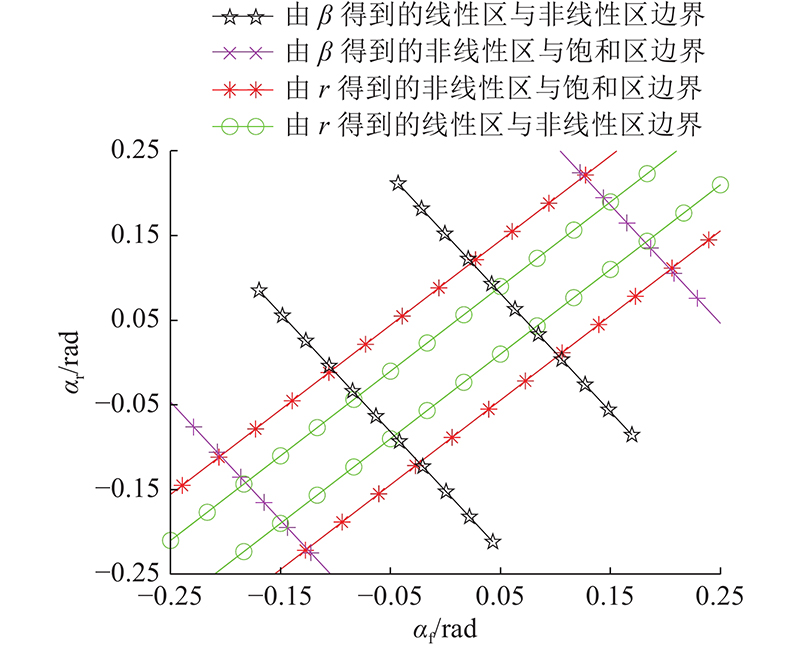
... 根据轮胎力区间特性,将轮胎力划分为线性区、非线性区和饱和区. 如图3 所示,以轮胎侧向力特性曲线为例,线性区的侧偏角和侧向力呈线性关系,较小的侧偏角变化能引起侧向力较大改变,此区域的轮胎能够为车辆提供足够的侧向力;在非线性区,虽然侧偏角的增加导致侧向力相应增大,但增大幅度没有线性区明显;饱和区的轮胎侧向力随着侧偏角的增加出现负增长,此区域的轮胎已无法为车辆提供足够的侧向力. 对于线性区和非线性区的边界,参考Wu等[16 ] 提出的方法得到临界前轮转角δ f_cp ,将δ f_cp 代入理想横摆角速度ω d 和理想质心侧偏角β d 公式中,得到线性区和非线性区边界. ...
1
... 式中:δ f_cp =μ C/u 2 ,其中C 为常数;K 为稳定性因素,K =m (a /k 2 −b /k 1 )/L 2 ,其中k 1 为前轮侧偏刚度,k 2 为后轮侧偏刚度. 文献[17 ]中的经验公式、以峰值侧向力为边界均可用于确定非线性区和饱和区边界,由于以峰值侧向力为边界须有明确的轮胎模型且寻找峰值点的计算过程复杂,本研究采用经验公式作为2个区域的边界,表达式为 ...
A control engineer's guide to sliding mode control
1
1999
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
Variable structure systems with sliding modes
0
1977
1
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
考虑模型不确定性和时延的静止无功补偿器自适应滑模控制器设计
1
2014
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
考虑模型不确定性和时延的静止无功补偿器自适应滑模控制器设计
1
2014
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
基于迭代学习观测器的卫星姿态滑模容错控制
0
2018
基于迭代学习观测器的卫星姿态滑模容错控制
0
2018
Longitudinal-vertical integrated sliding mode controller for distributed electric vehicles
1
2020
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
Tracking control of nonlinear systems using sliding surfaces with application to robot manipulator
1
1983
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
Sliding controller design for non-linear systems
1
1984
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
1
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
1
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
1
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
Sliding order and sliding accuracy in sliding mode control
1
1993
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...
1
... 滑模控制(sliding mode control,SMC)[18 -20 ] 是AFS和DYC中常用的控制方法. 滑动模态对于系统干扰和参数扰动具有强鲁棒性和完全自适应性,使SMC被广泛应用在电气、航天、机械[21 -23 ] 等多个领域. 虽然SMC经过多年发展已成为非线性控制理论领域的重要分支,但其固有的高频切换即抖振现象使实际应用变得困难重重. 对此学者进行了大量研究,提出如边界层[24 -25 ] 、趋近律[26 ] 的方法. 虽然这些方法对削弱抖振有一定作用,但如在边界层法中,需要设计新的方法来消除引入边界层导致系统产生的稳态跟踪误差[27 ] . Levant[28 ] 提出的高阶滑模概念是传统滑模控制的进一步推广,该概念在保持传统滑模控制鲁棒性的同时,抑制了抖振现象,提高了控制性能[29 ] . ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}