

针对电池SOC估计问题,国内外研究方法主要基于电池物理特性[4]、电池模型[5]和数据驱动[6-7]等. 扩展卡尔曼滤波(extended Kalman filter,EKF)同时对噪声和状态进行预测估计,广泛应用于锂离子电池SOC估计中[8]. EKF估计精度对过程和测量噪声的初始值比较敏感,算法容易发散. Xiong等[9]在EKF基础上提出改进算法,如自适应扩展卡尔曼滤波(adaptive extended Kalman filter,AEKF)实现噪声协方差阵自适应匹配. 改进熵扩展卡尔曼滤波(correntropy extended Kalman filter,CEKF)结合样本熵和加权最小二乘的优点,在非高斯噪声环境下进行鲁棒性验证[10]. 双扩展卡尔曼滤波(dual extended Kalman filter,DEKF)实现电池的状态和参数联合估计[11]. 上述SOC估计方法从噪声角度分析和改进EKF,但没有考虑历史数据的再迭代修正作用,导致协方差矩阵退化,跟踪能力弱化,从而导致算法的估计精度不高. 为了提高历史数据的利用程度,Li等[12]提出多新息扩展卡尔曼滤波(multi-innovation extended Kalman filter,MIEKF). 该方法融合多新息辨识理论与卡尔曼滤波,进行电池状态估计和参数辨识,具有较好的估计效果. 该方法只是在时间维度上扩展迭代使用历史数据,没有区分新旧历史数据,造成数据过饱和,使得估计值与真实值具有较差的跟踪性能.
为了提高锂离子电池SOC估计的准确性和收敛性,本文利用历史数据修正,解决传统MIEKF中估计值与真实值的跟踪性能较差问题,提出基于遗忘因子改进多信息扩展卡尔曼滤波(multi- innovation extended Kalman filter based on forgetting factor,FMIEKF)的SOC估计方法. 新数据对提高算法的跟踪性能有促进作用,而旧历史数据可能产生累积干扰,通过引入遗忘因子矩阵,调整新旧历史数据权重,可以防止数据过饱和,通过实验和硬件在环验证FMIEKF方法的优越性.
1. 锂离子电池建模和参数辨识
1.1. 锂离子电池建模
图 1
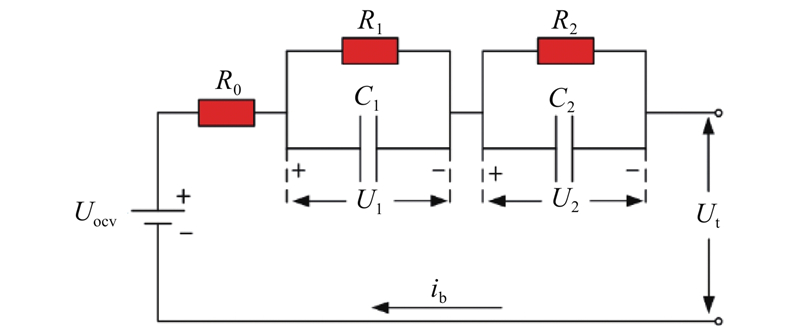
基于等效电路霍夫电压定律,可得
式中:Uocv(t)为开路电压;Ui(t)为极化电压;ib(t)为电流,充电为正,放电为负;R0为欧姆内阻;Ri、Ci分别为极化内阻和极化电容. SOC定义为
式中:Cn为额定容量,η为充放电库仑效率,SOC(t0)为初始SOC. 以电池的SOC、极化电压U1(t)、U2(t)为状态量,建立离散的双极化等效电路状态空间方程,即
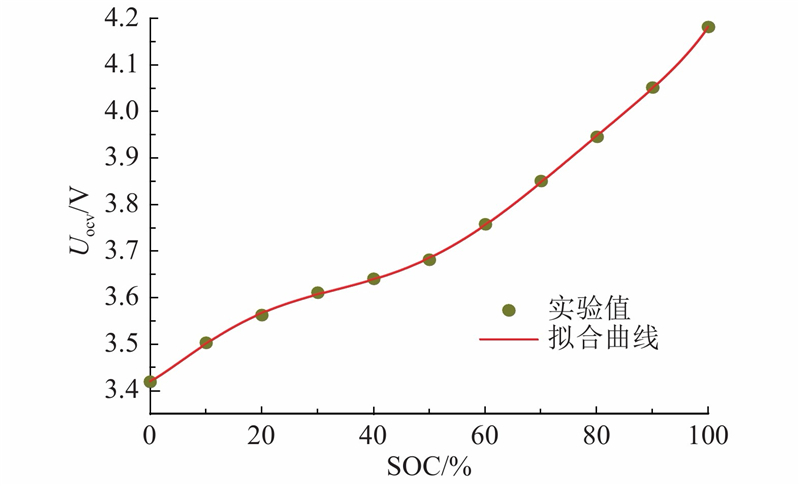
1.2. 开路电压测试
表 1 不同多项式的拟合结果统计
Tab.1
| 阶数 | RSS/10−5 | R2 |
| 4阶 | 34.09 | 0.999 0 |
| 5阶 | 10.31 | 0.999 3 |
| 6阶 | 7.042 | 0.999 6 |
| 7阶 | 6.938 | 0.999 8 |
图 2
1.3. 参数辨识
在进行电池参数辨识前,将电池的双极化等效电路模型转化成自回归滑动平均(autoregressive moving average,ARMA)模型[15],输出方程经Laplace变换得到s域的输出方程:
令
式中:G(s)为电路阻抗;τ1和τ2为极化时间常数,
式中:Δ t为采样时间. 离散后的传递函数为
式中:β0、β1、β2、β3、β4为模型参数的待定系数,转化到离散时域为
因此,参数辨识和状态矩阵为
将式(13)写成FFRLS能够辨别的形式,估算出参数的最优估计,因此
模型参数的求解如下:
解耦方程组,可以求出二阶RC模型参数R0、R1、R2、C1、C2. 通过混合动力脉冲能力特性(hybrid pulse power characteristic,HPPC)实验确定在线辨识的初始参数,在100%状态下的离线参数结果如表2所示.
表 2 100%SOC下的HPPC参数辨识结果
Tab.2
| R0 /mΩ | R1 /mΩ | R2 /mΩ | C1 /F | C2 /F |
| 3.89 | 7.548 | 0.453 | 3929 | 1101 |
2. 基于FMIEKF状态估计
2.1. EKF多新息扩展
针对时变参数系统,Ding[16]提出多新息辨识方法,结合传统时域的最小二乘法、卡尔曼滤波、随机梯度等辨识算法,通过滑动窗口形式,利用一定时间范围内的历史数据,对参数进行递归辨识和估计. 该方法在一定程度上提高了算法收敛速度和参数辨识的准确性. 单新息参数的更新表达式为
式中:L(t)为增益向量,e(t)为单新息标量. 将单新息标量扩展成多新息向量,则
式中:p为新息长度. 为了考虑历史数据的再迭代修正作用,提高SOC估计的准确性和收敛性,在EKF算法中融合多新息辨识理论,形成MIEKF,实现对历史电压、电流数据的重复使用. 将EKF算法中的单新息扩展成多新息,表达式为
为了保证矩阵维数的兼容性,根据新息长度p不同,应扩展增益矩阵,表达式为
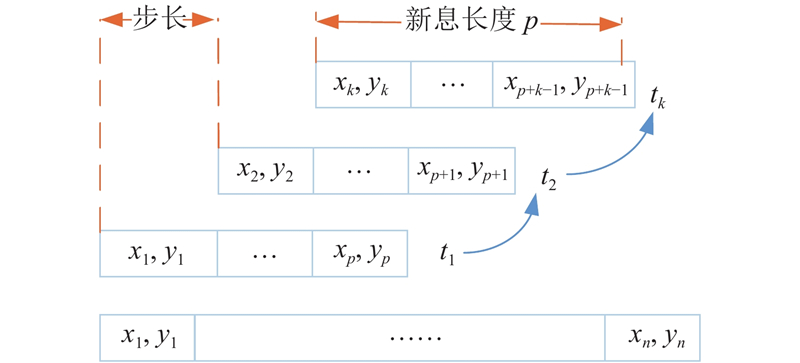
通过滑动窗口实现数据的更新,新息长度为窗口长度,数据的更新示意图如图3所示. 在进行锂离子电池SOC估计时,当数据长度不到信息长度时,采用EKF进行状态估计,以确定扩展后的增益矩阵和多新息矩阵初始值.
图 3
2.2. FMIEKF算法
针对非线性时变同时的状态估计和参数辨识问题,MIEKF只是在时间维度上扩展迭代使用的数据量,没有区分窗口长度内的新旧数据. 在SOC估计算法中,新测量数据对参数估计精度有促进作用,陈旧历史数据可能产生累积干扰,造成数据饱和的问题,从而使得估计值和真实值有较大偏差. 引入遗忘因子削弱递归过程中的历史数据修正作用,在一定程度上减少了累计干扰问题,从而提高SOC估计精度. 为调整新旧历史数据的权重,在EKF多新息扩展的增益矩阵K(p, k)乘以遗忘因子矩阵α,即
状态方程更新后,可得
为了增大当前新数据的权重,取权重最大,则
为了削弱历史数据累积干扰的作用,保证FMIEKF算法的有效修正,带遗忘因子权值矩阵可以取为
式中:ε为历史数据遗忘率,满足0 ≤ ε ≤ 1.0.
2.3. 参数辨识和状态估计流程
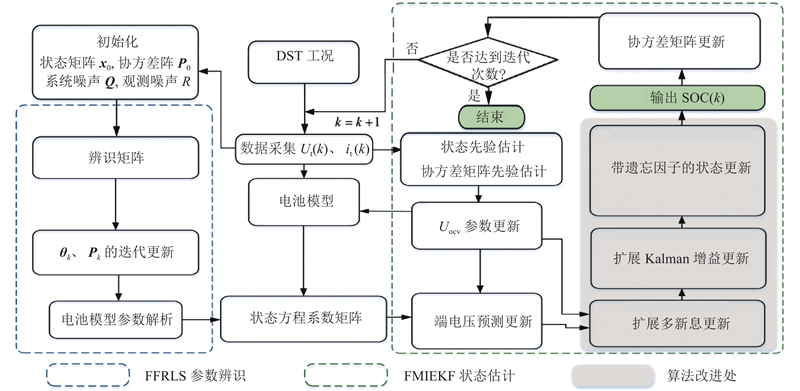
采用带有遗忘因子递归最小二乘法(forgetting factors recursive least squares,FFRLS),开展电池在线参数辨识,辨识参数包括R0、R1、C1、R2、C2. 将辨识参数结果代入FMIEKF算法中,求解锂离子电池的SOC,具体流程如图4所示. FFRLS-FMIEKF联合估计流程如下.
图 4
1)初始化. 采样时间Δt=0.1 s;遗忘因子μ=0.99;初始协方差矩阵P0;电池的相关初始参数,SOC、Uocv和Cn.
2)参数迭代更新.
3)根据参数辨识结果,预测状态:
4)协方差矩阵预测:
5)增益矩阵更新:
6)多新息矩阵和扩展增益矩阵更新,见式(19)、(20).
7)状态修正更新:
8)协方差矩阵更新:
9)令k= k+1,返回2).
3. 实验及结果分析
3.1. 实验设置
图 5
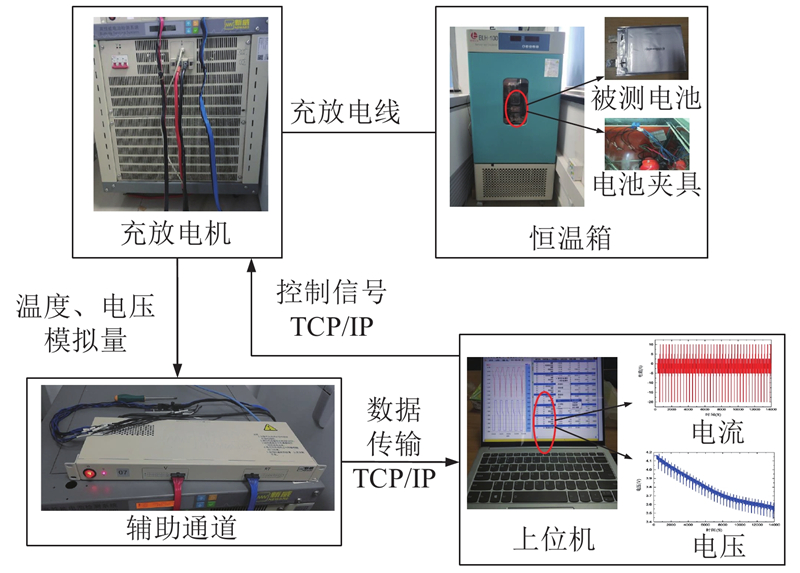
图 5 电池充放电实验装置结构
Fig.5 Structure of battery charging and discharging experimental device
表 3 实验电池的参数表
Tab.3
| 参数 | 数值 |
| 电池型号 | 聚合物锂电池1265132 |
| 外形尺寸 | 厚8 mm,宽92 mm,高112 mm |
| 净重 | 200 g |
| 额定容量 | 10 A·h |
| 标准电压 | 3.7 V |
| 工作电压 | 3.0~4.2 V |
| 持续工作电流 | ≤25 A |
| 充电电流 | ≤5 A |
3.2. 实验结果分析
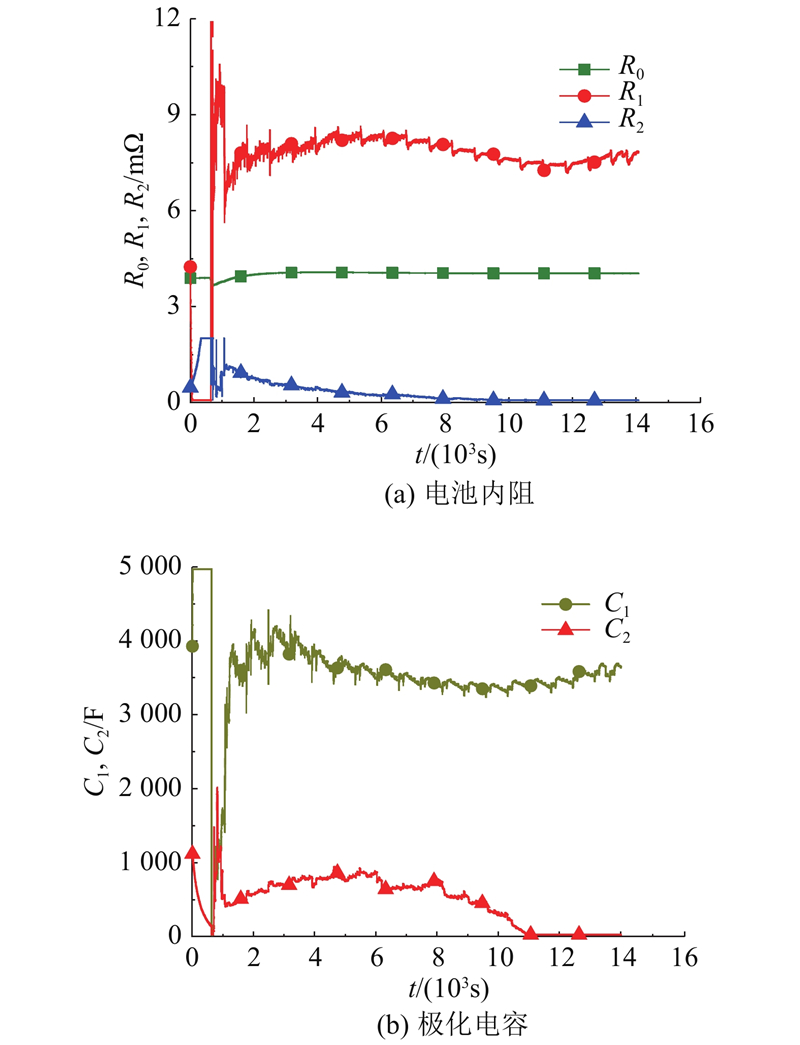
3.2.1. 在线参数辨识结果
在DST工况中,电池初始SOC为100%,通过FFRLS在线辨识参数,所辨识参数分别为R0、R1、C1、R2和C2,辨识结果如图6所示. 参数趋于收敛后,在线参数的辨识结果和离线实验数据结果接近,因此提出的参数辨识方法具有较高的准确度.
图 6
3.2.2. 正确SOC初值下的估计准确性分析
图 7
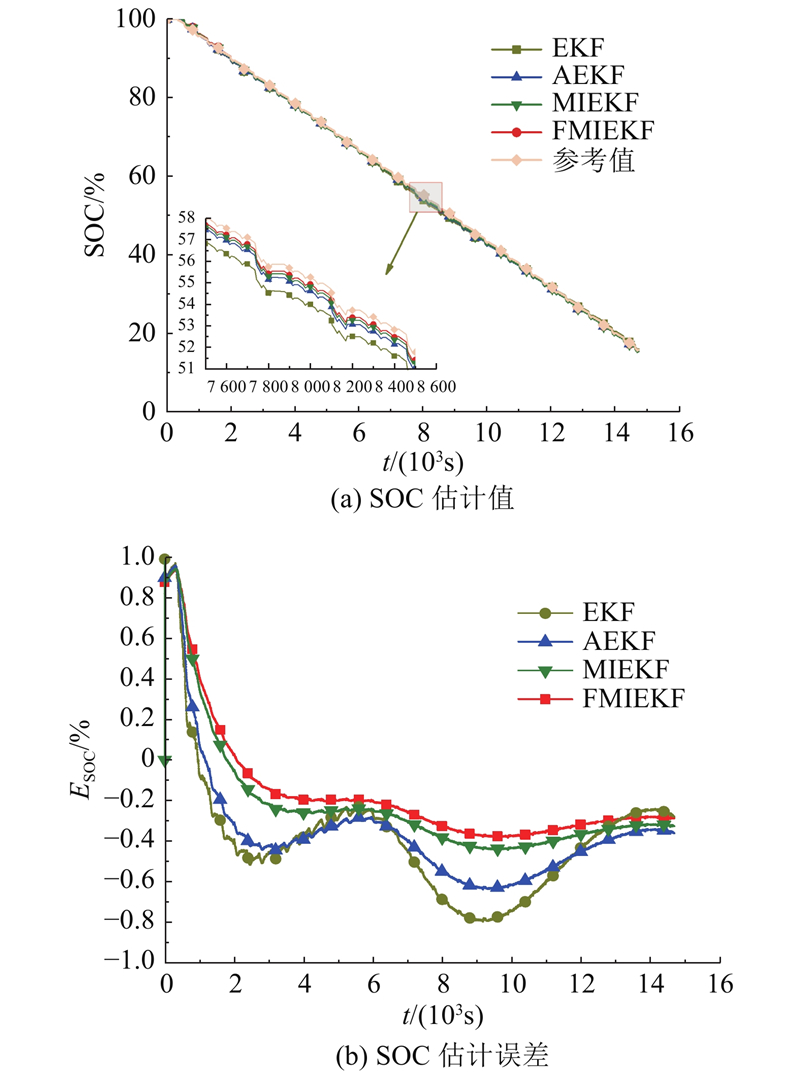
表 4 不同算法的SOC估计误差统计
Tab.4
| 估计算法 | ESOC /% | ||
| 最大误差 | 平均误差 | 标准差 | |
| EKF | 0.985 | 0.267 | 0.405 |
| AEKF | 0.967 | 0.249 | 0.328 |
| MIEKF | 0.962 | 0.233 | 0.309 |
| FMIEKF | 0.948 | 0.214 | 0.287 |
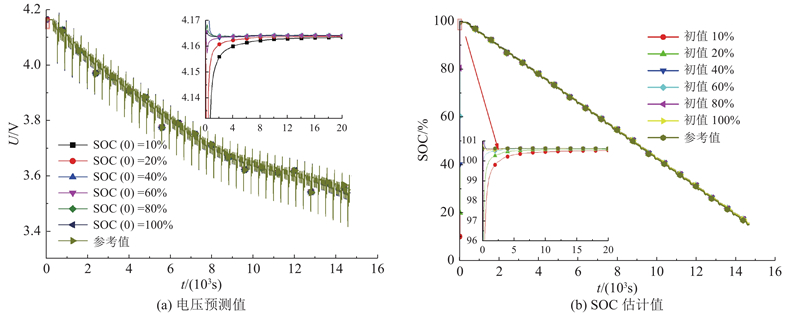
3.2.3. 不同SOC初值下的收敛性分析
电池在实际工作情况下无法确定准确的SOC初值,因此需要开展FMIEKF算法的不同SOC初值收敛性分析. 使用6种不同的SOC初值进行讨论分析,分别包括100%、80%、60%、40%、20%、10%. 为了控制算法参数对算法收敛性的影响,新息长度参数设为9,遗忘因子参数设为0.5.
图 8
3.2.4. 新息长度对FMIEKF准确性的影响
新息长度决定了历史数据使用量,对FMIIEKF准确性具有较大的影响. 采用控制单一变量,参数遗忘因子设置为0.5,新息长度分别选取p = 3、6、9、12,估计结果如图9所示. 可知,相比较EKF,FMIEKF算法进行SOC估计误差曲线平滑,修正幅度相对稳定,误差明显更小;p越大,估计误差越小,估计精度越高,但超过一定新息长度时,误差趋于饱和,因此一定长度的历史数据重复利用有利于提高EKF算法的估计精度.
图 9
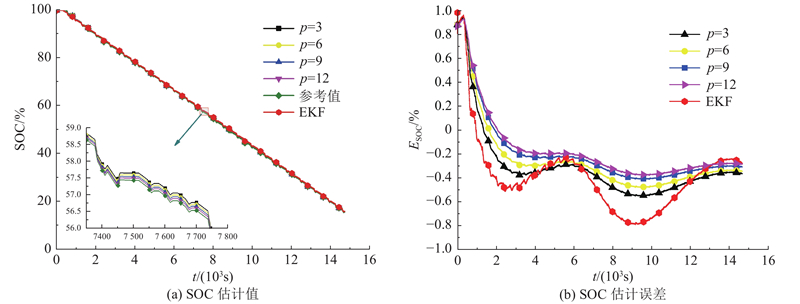
图 9 不同新息长度下的SOC估计结果
Fig.9 SOC estimation results for different innovation lengths
3.2.5. 遗忘因子对FMIEKF算法准确性的影响
遗忘因子决定了滑动窗口内新、旧历史数据的占比权重. 若遗忘因子过大,则会造成状态估计误差变大,甚至无法收敛;若遗忘因子过小,则历史数据无法得到充分重复利用,状态估计精度降低. 研究遗忘因子对FMIEKF准确性的影响.
在p=9的条件下,选取不同的遗忘因子:a=0.3、0.5、0.7、0.9,与MIEKF算法进行对比,结果如图10所示. 可知,与改进前的MIEKF相比,增大遗忘因子有利于提高算法的估计精度;随着遗忘因子的增大,SOC估计误差先减小后增大,当a=0.5时,具有较好的SOC估计精度.
图 10
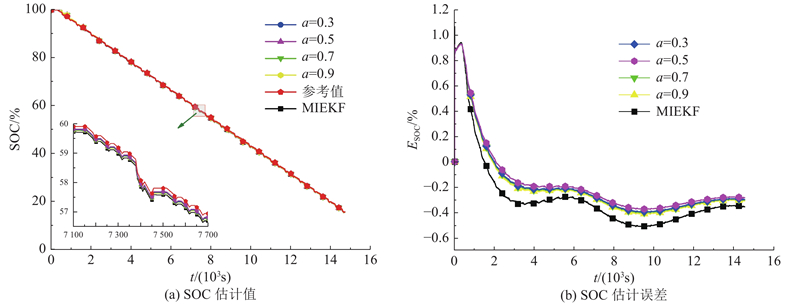
图 10 不同遗忘因子的SOC估计结果
Fig.10 SOC estimation results for different forgetting factors
4. 硬件在环验证
为了探究提出的SOC估计算法的实用性,进行硬件在环(hardware in loop,HIL)实验验证. 利用实验室设备,包括电池模拟器、BMS采集板、直流电源、USB-CAN等,搭建HIL验证平台,如图11所示. 其中电池模拟器为被控对象,实时响应模拟单体电池的电压、电流和温度. 上位机基于LABVIEW编程环境,集成电池模拟器控制程序和BMS数据采集程序,分别通过USB-CAN、USB与BMS和电池模拟器实现数据传输.
图 11
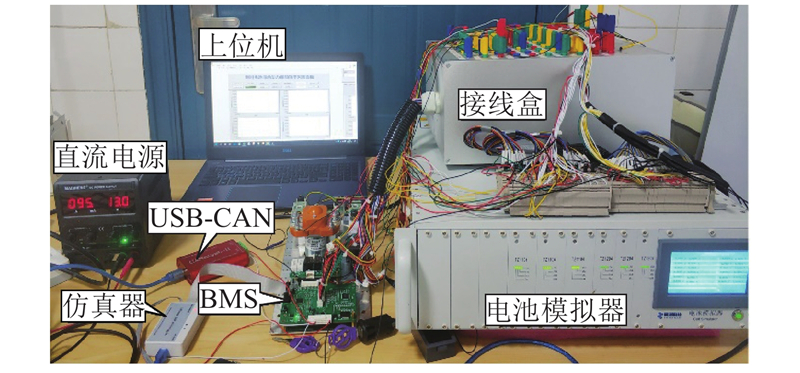
图 12
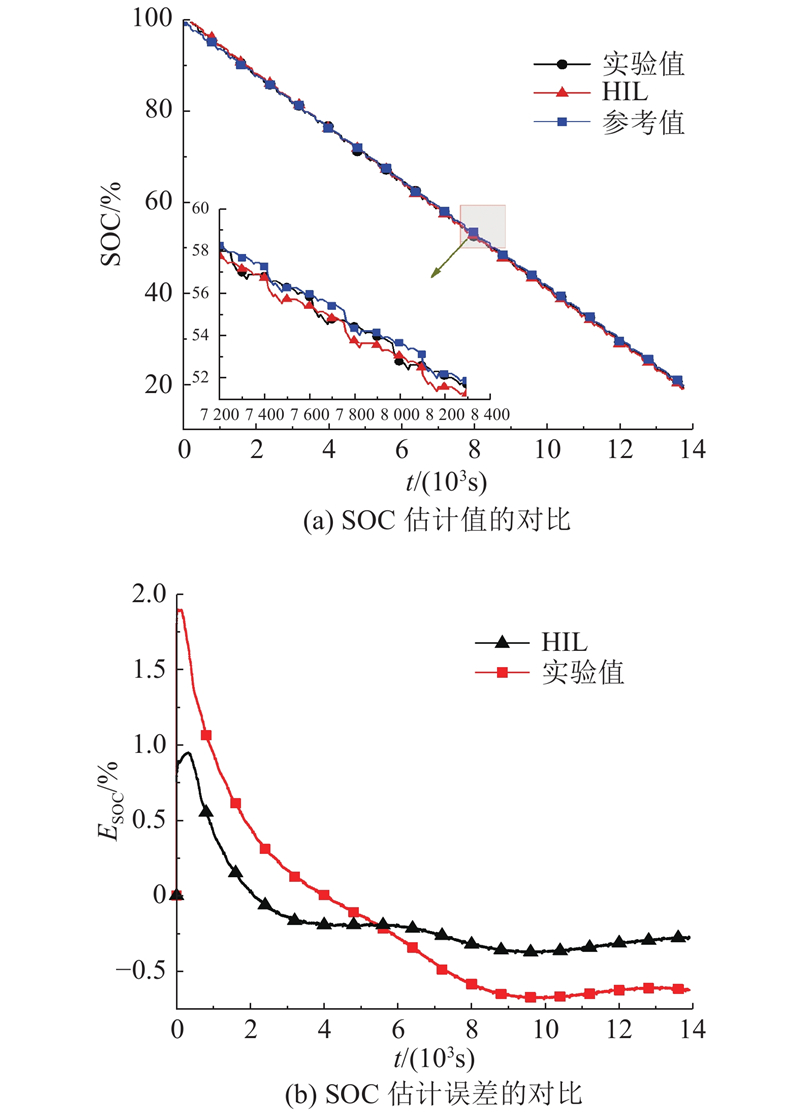
表 5 改进MIEKF的HIL结果统计
Tab.5
| % | |||
| 指标 | 最大误差 | 平均误差 | 均方误差 |
| 实验值 | 0.948 | 0.214 | 0.287 |
| HIL | 1.903 | 0.243 | 0.342 |
5. 结 论
(1)FMIEKF算法的最大估计误差为0.948%,平均误差为0.214%,相比EKF、AEKF和MIEKF,平均误差分别减少19.85%、14.06%和8.15%,因此改进MIEKF具有很好的准确性.
(2)FMIEKF算法在不同的SOC初值下,端电压预测值在20 s内收敛至测量值,且电池在静置过程中能够修正电池SOC的估计误差,因此改进MIEKF具有很好的收敛性.
(3)通过硬件在环,验证了提出的锂离子电池SOC估计算法具有较高的实时性和可靠性,可以适用于实际的电池管理系统中.
参考文献
A virtual sensor for electric vehicles’ state of charge estimation
[J].DOI:10.3390/electronics9020278 [本文引用: 1]
Dynamic data-driven and model-based recursive analysis for estimation of battery state-of-charge
[J].
全海深深潜器所用动力锂离子电池电气特性
[J].
Electrical characteristics of power lithium-ion batteries used in all-sea deep submersibles
[J].
Fault diagnosis of voltage sensor and current sensor for lithium-ion battery pack using hybrid system modeling and unscented particle filter
[J].
基于QPSO-BP神经网络的锂电池SOC预测
[J].
Lithium battery SOC prediction based on QPSO-BP neural network
[J].
Capturing lithium-ion battery dynamics with support vector machine-based battery model
[J].
The co-estimation of state of charge, state of health, and state of function for lithium-ion batteries in electric vehicles
[J].DOI:10.1109/TVT.2017.2751613 [本文引用: 1]
A robust state-of-charge estimator for multiple types of lithium-ion batteries using adaptive extended Kalman filter
[J].
State of charge estimation of lithium battery based on improved correntropy extended Kalman filter
[J].DOI:10.3390/en13164197 [本文引用: 1]
Revisiting the dual extended Kalman filter for battery state-of-charge and state-of-health estimation: a use-case life cycle analysis
[J].
The multi-innovation extended Kalman filter algorithm for battery SOC estimation
[J].DOI:10.1007/s11581-020-03716-0 [本文引用: 1]
可变低温环境锂电池组内部短路故障诊断
[J].
Fault diagnosis of internal short circuit of lithium battery pack in variable low temperature environment
[J].
UTSTF锂离子电池时变参数估计与故障诊断
[J].
Time-varying parameter estimation and fault diagnosis of UTSTF lithium-ion battery
[J].
A model-based state-of-charge estimation method for series-connected lithium-ion battery pack considering fast-varying cell temperature
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}