

本文以低速小型无人船为研究对象,采用数值模拟和实验研究对比的方法,研究螺旋桨的推力、船舶阻力、扭矩等参数,提出双桨差速时无人船转弯半径的预报方法,为无人船的自主精细化航行奠定技术基础.
1. 数值模拟
1.1. 模型和自由液面
研究中所涉及的无人船均为不可压牛顿流体,流体运动满足连续性方程与动量守恒方程:
式中:ρ为密度,Ui、Uj为时均速度,μ为动力黏性系数,p为压力时均值,Si为源项,
式中:
其中
控制方程基于压力耦合求解,其中对流项采用高阶求解格式进行离散,扩散项采用二阶欧拉格式向后差分方法进行离散. 湍流模型选用SST
1.2. 计算模型
图 1

图 2
1.3. 船的自航数值模拟
假定船圆周运动的速度为Va,保持Va不变,左螺旋桨转速为0,通过调节右螺旋桨的转速n,得到右螺旋桨的推力Tn和船航行阻力Rn随n的变化曲线. 2条曲线相交的点即为自航点,得到Va船速下所对应的螺旋桨的转速na和推力Ta. 由推力和两桨之间的距离,可以计算船的转船力矩Ma(已知螺旋桨转速的方法与上述方法类似,保持螺旋桨转速不变,通过调节船速获得自航点).
通过船的自航数值模拟,可以得到船在稳定状态下某一船速所对应的螺旋桨转速和螺旋桨推力,计算出Ma,后续船舶的圆周运动数值模拟会基于Ma得到船的转弯角速度,从而计算出船的转弯半径.
1.3.1. 网格处理
图 3

图 4
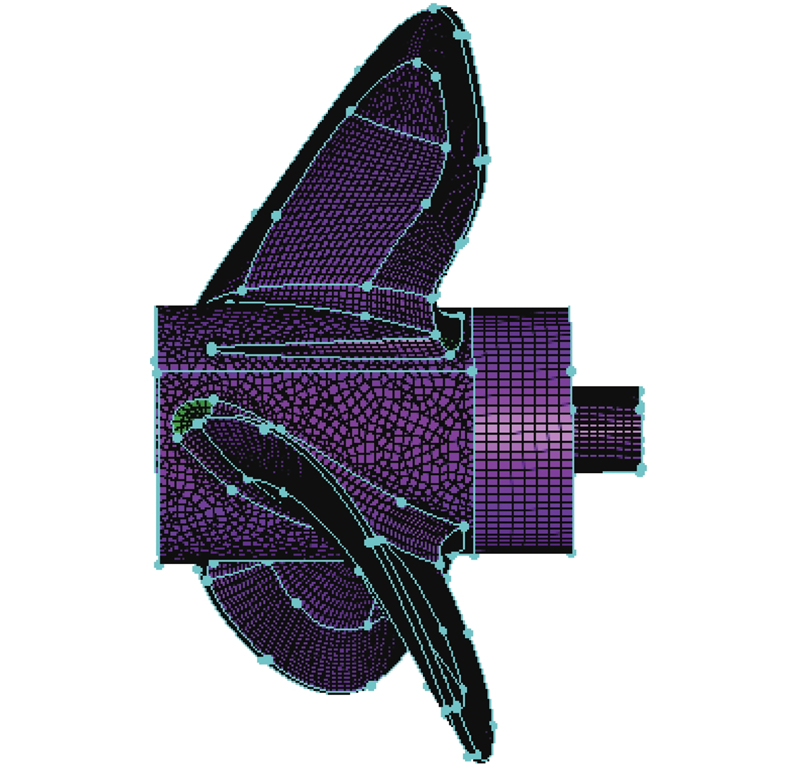
在计算过程中,采用滑移网格技术模拟螺旋桨的旋转运动. 整个流场划分成2个旋转域和1个静止域,共计470万个网格. 其中2个旋转域有230万网格,占网格总数的48.93%,静止域有240万网格. 2个旋转域为包含螺旋桨的圆柱体. 由于螺旋桨的桨叶部分在仿真计算中较重要,划分了部分边界层网格. 分别在左、右螺旋桨外侧生成一个圆柱体,用非结构网格填充圆柱体内部除螺旋桨外的剩余空间,得到2个旋转域网格.
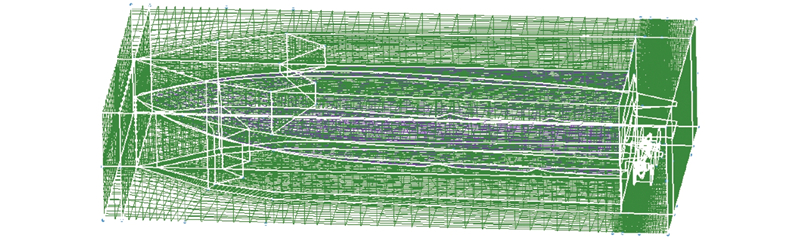
图 5
1.3.2. 边界条件
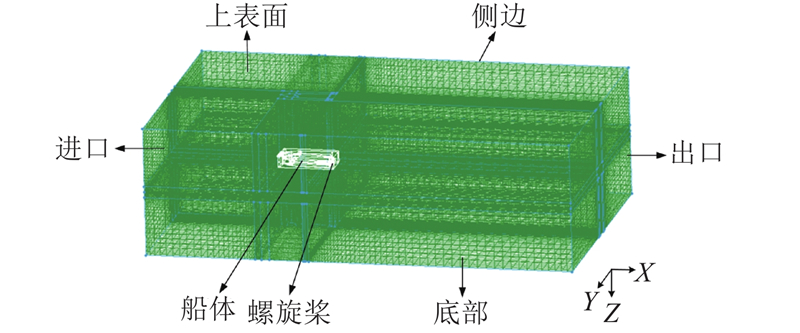
1)入口边界设定:本文的来流方向为指向X轴方向(从船前指向船尾),将图6的inflow边界设置为速度入口,大小为0.441 m/s.
2)出口边界设定:将图6的outflow边界设置为开放式出口.
3)壁面边界设定:将图6的hull、side、top、bottom边界设置为 Wall,其中的hull为无滑移壁面,其余3个为自由滑移壁面.
4)交界面设定:在2个旋转域和静止域相交的网格设置交界面,交界面模型为滑移网格模型(transient rotor-stator)[15].
图 6
1.3.3. 计算结果及分析
在求解器中依次将推力在x方向投影的面积分作为螺旋桨推力Tx,阻力在船体表面积的面积分Rx作为螺旋桨的推力. 将船舶阻力和螺旋桨推力数值模拟结果的稳定性作为判断收敛性的依据. 在每一步迭代过程中,均对上述2个值进行数值求解,如图7所示为当残差<10−6时,迭代200步的计算结果. 图中,St为迭代时间步长. 可知,船舶阻力和螺旋桨推力的波动范围定义为±0.1.
图 7
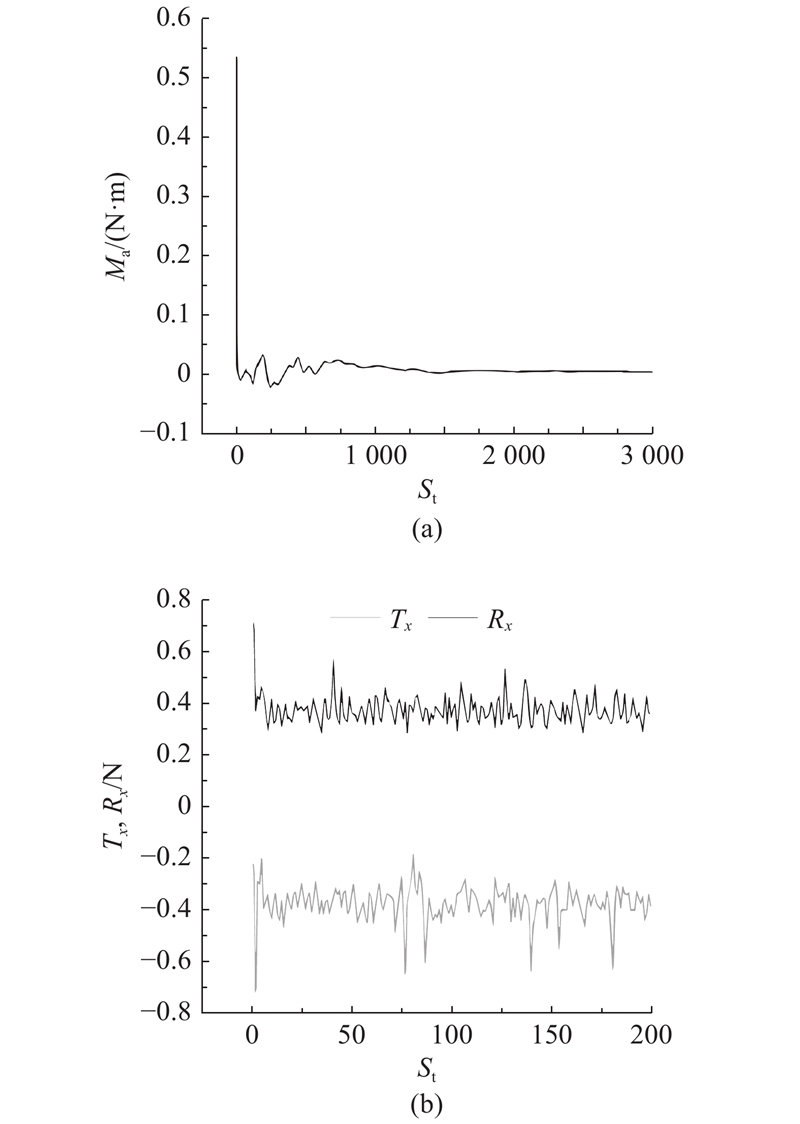
图 7 力矩、螺旋桨推力和船舶阻力随步长的波动
Fig.7 Moment of force, thrust of propeller and resistance of ship calculated in every time step
通过船舶的圆周运动模拟,得到当右螺旋桨转速为6 660、7 620、8 580、9 540 r/min时的螺旋桨推力和船阻力,如图8所示. 可知,当螺旋桨转速为7 560 r/min时,螺旋桨的推力和船航行的阻力相等,都为0.37 N. 已知两螺旋桨间的距离为0.038 m,则转动力矩
图 8
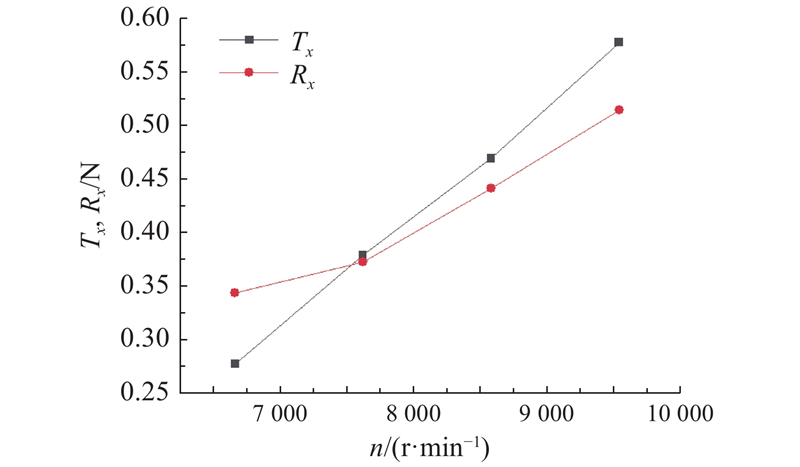
图 8 当转速为6 500~10 000 r/min时自航点的确定
Fig.8 Determination of self-navigation match points when rotation speed is between 6 500 and 10 000 r/min
图 9
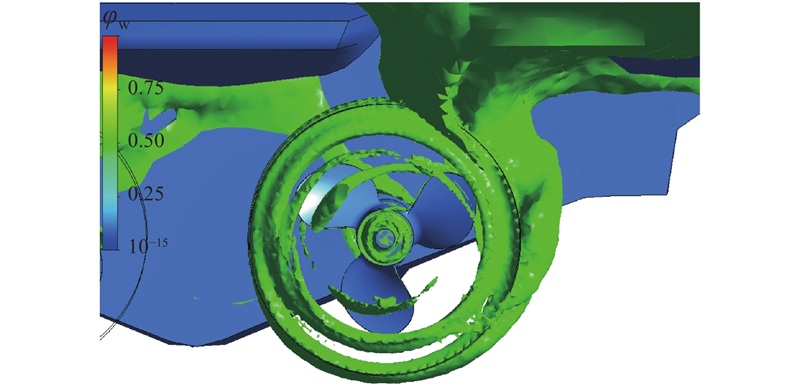
图 9 螺旋桨转速为7 560 r/min时右侧螺旋桨附近的自由液面分布图
Fig.9 Distribution of freedom surface around right propeller when rotation speed of propeller is 7 560 r/min
图 10
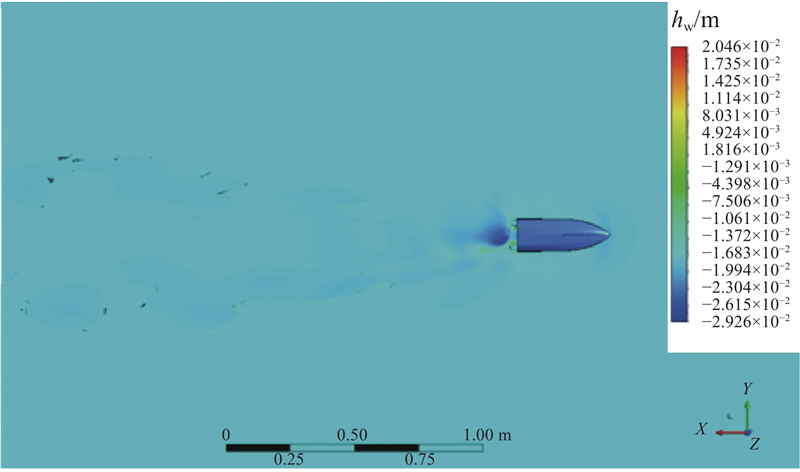
图 10 螺旋桨转速为7 560 r/min时船行驶后形成的波高图
Fig.10 Distribution of wave height after ship passed when rotation speed of propeller is 7 560 r/min
1.4. 船的圆周运动数值模拟
整个流场由2个计算域组成:一个是旋转域,一个是静止域. 整个计算域表面给定x轴向的速度Va(船的航行速度),通过调节旋转域的角速度
通过船的圆周运动数值模拟,得出船在某一转动角速度下的转动力矩与前面自航模拟得到的结果相等. 利用该角速度和船速,可以计算船的转动半径.
1.4.1. 网格处理
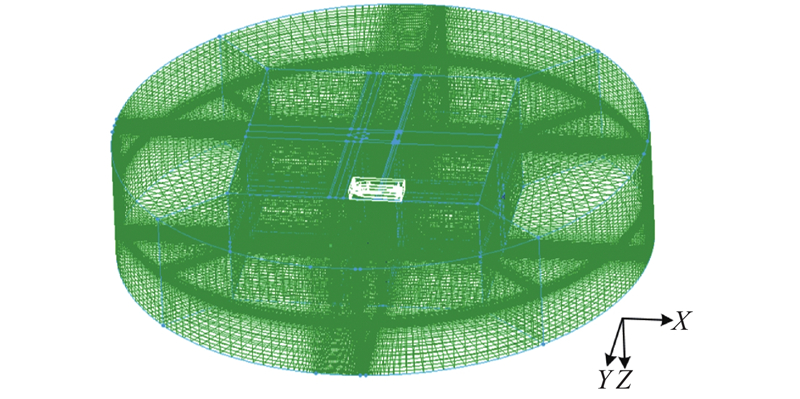
利用自航数值模拟的网格划分方法,得到长方体状的网格. 在长方体外侧生成一个圆柱体框架,并与内部的长方体框架相连,用结构网格填充两框架间的空间,构建圆柱状的旋转域网格,如图11所示.
图 11
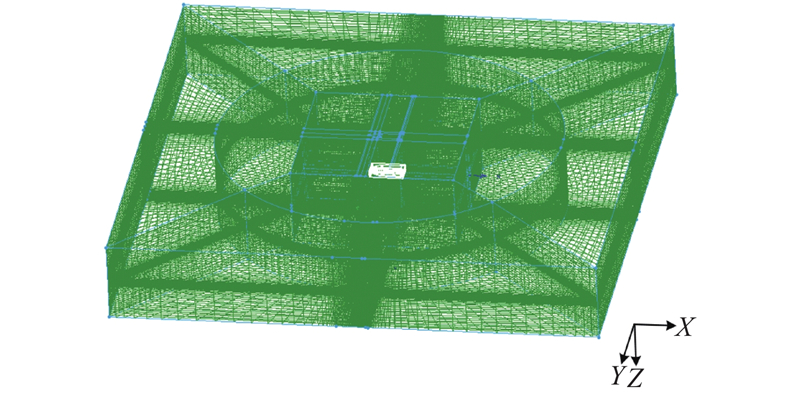
利用类似的方法在旋转域网格外侧生成4个体网格,得到整个计算域. 如图12所示,除上述旋转域外的其余部分为静止域.
图 12
1.4.2. 边界条件
1)远场边界设定:给定X轴方向(从船前指向船尾)的速度矢量,大小为0.441 m/s.
2)壁面边界设定:船身和螺旋桨的表面设为无滑移壁面.
3)交界面设定:旋转域和静止域相交的网格设置为交界面,交界面模型为多参考系模型(frozen rotor)[15].
1.4.3. 计算结果及分析
选用同样的收敛方法,选取角速度为−9.55、−11.46 r/min 2种工况作为研究对象,得出船身受到的转船阻力矩. 绘制如图13所示的转动力矩Ma,用自航结果计算的单个螺旋桨推力和螺旋桨偏心安装位置为力臂算出的转船推力矩Mb. 为了得到船的转弯角速度,利用2种方法计算船的转动力矩. 基于螺旋桨推力得到固定的转动力矩Ma;基于船舶阻力得到转动阻力矩随转弯角速度变化的曲线(即为图中的转动力矩Mb),2条线的交点即为船体的实际转弯角速度. 得到转船力矩为0.007 03 N·m时的角速度为−10.96 r/min.
图 13
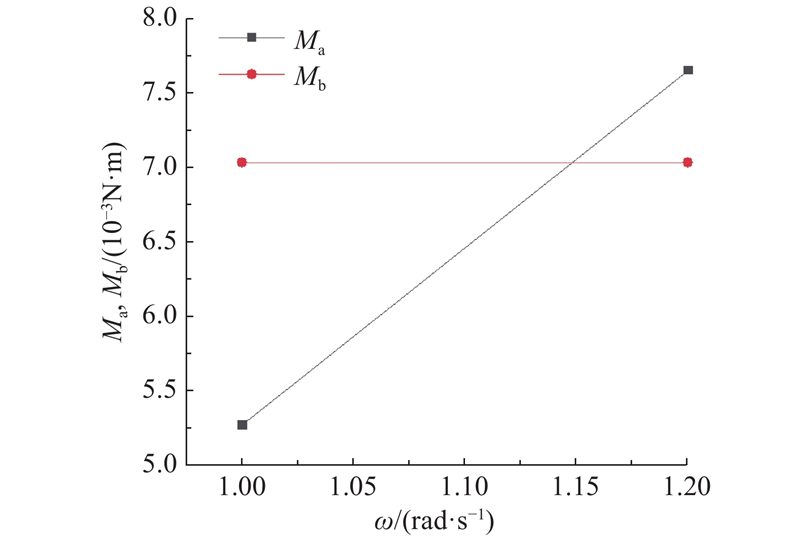
船的转动半径为
选取角速度为−9.55 r/min的计算结果,开展流场分析发现,船侧面形成一个涡,涡的中心和船的重心相距一个转弯半径.
图 14
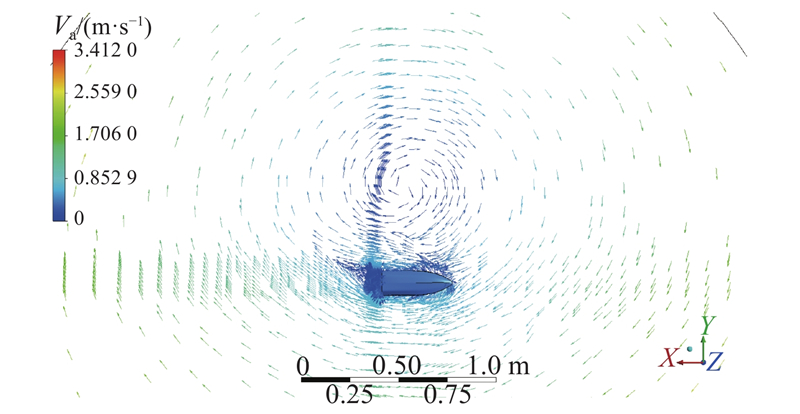
图 14 当船以−10.96 r/min速度转弯时的速度矢量图
Fig.14 Distribution of velocity vector when rotation speed of ship is −10.96 r/min
图 15
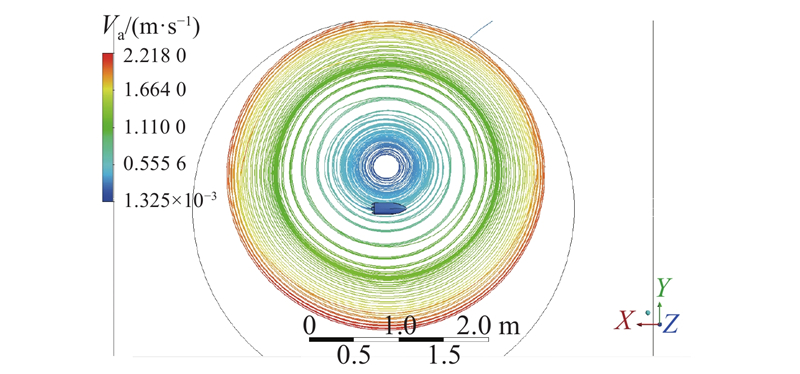
图 15 当船以−10.96 r/min速度转弯时的流线图
Fig.15 Streamlines of ship when rotation speed of ship is −10.96 r/min
2. 实验研究
2.1. 实验方法
图 16
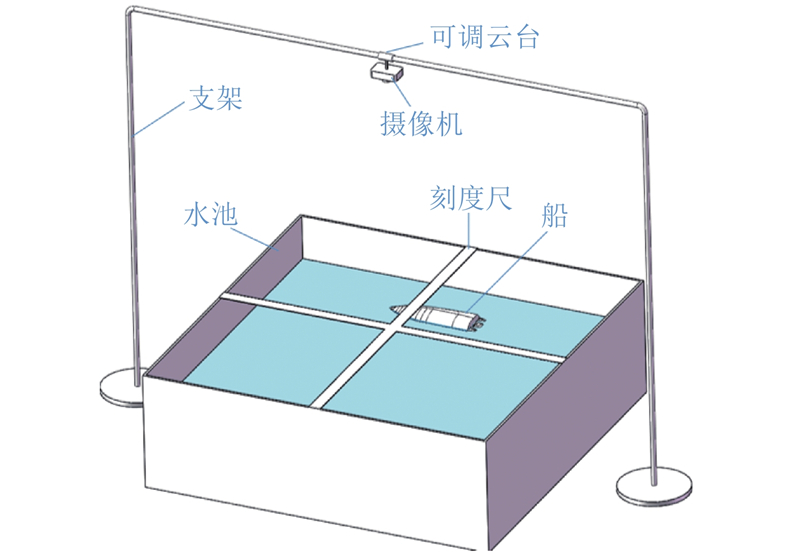
图 16 无人船转弯半径测试的实验平台设计图
Fig.16 Experimental system of unmanned ship turning radius
无人船在水池中进行匀速圆周运动,摄像机从水池上空往下拍摄,得到无人船匀速转1周的视频,通过剪辑软件把视频分割成独立的照片. 借助水池纵向和横向粘贴的刻度尺,确定任意时刻无人船的位置点. 在各个坐标点添加船转半周的时间,寻找新时间点所对应的照片,得到新时间点时船的位置点,由这2个位置点计算无人船的转弯半径.
2.2. 实验结果及分析
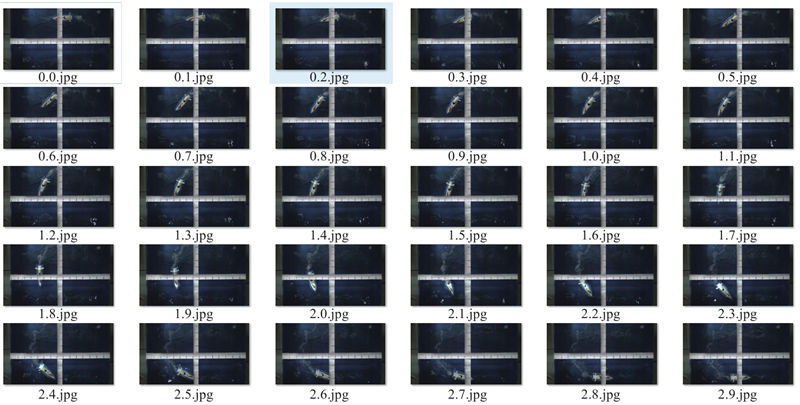
通过实验得到一段无人船圆周运动的视频,利用剪辑软件截取船匀速左转一圈的一段视频. 视频总长为5.8 s,即船转一圈的时间为5.8 s. 通过剪辑软件中的连续截图功能,视频播放过程中每隔0.1 s截一张图,如图17所示,总共得到59张图.
图 17
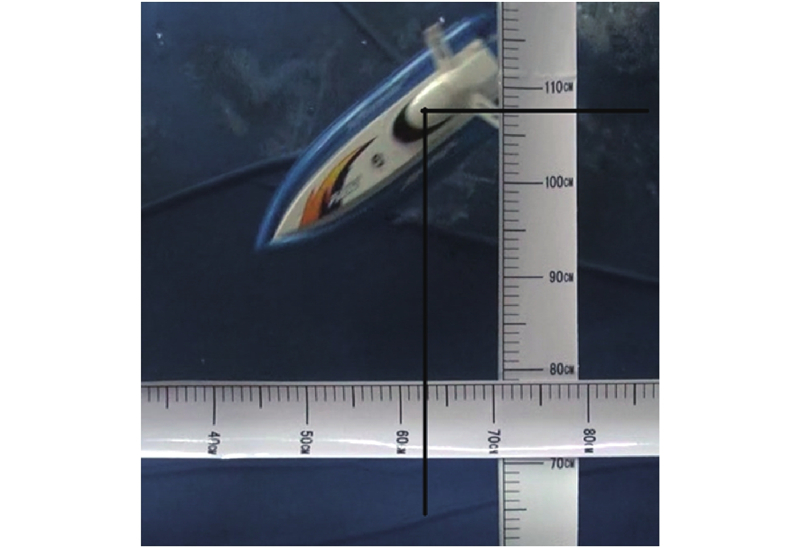
打开某张截取的图片,以0.6 s的截图为例,以船的重心为顶点,如图18所示,分别绘制横向和纵向2条垂线. 此时,纵向线与软尺相交于62.9,横向垂线与软尺相交于107.6,由此可得0.6 s时船的重心位置为(62.9,107.6). 需要2.9 s,通过上述方法得到船转半圈(即3.5 s)时船的重心位置(94, 43),依据这2个点的坐标值计算出船匀速圆周运动时的转弯半径为35.85 cm.
图 18
为了降低实验的测量误差,随机选取6组数据进行转弯半径的求解. 求解这6组数据的平均值,作为船舶实际的转弯半径.
根据摄像机的成像原理可知,同一张照片中的2个物体,距离相对远的物体会被缩小. 通过上述实验所得的转弯半径不是实际的转弯半径,需要进行换算操作. 摄像机和船重心间的直线距离为126 cm,刻度尺所在平面和船重心所在平面之间的垂直距离为18 cm,则实际转弯半径为
将仿真得到的转弯半径和实验结果作比较,误差为5.56%,基本能够满足工程实用的要求.
3. 结 论
(1)在滑移网格模型中,运用螺旋桨自身旋转产生推力的方法,可以较准确地模拟螺旋桨的推力和船的阻力.
(2)对包含船、桨在内的大区域网格旋转,可以较准确地模拟船的圆周运动.
(3)船在旋转运动时,水流的速度由中心向外侧逐渐变大,船身周围的水流速度和所求的船速基本相等.
(4)船转弯半径的数值模拟结果与试验测量值之间的相对误差为5.56%.
当螺旋桨转速或船速中任一项确定时,可以采用上述数值模拟方法,对船圆周运动的转弯半径进行有效预报,这有助于研究双桨的转速差和船的转弯角度之间的关系,推动无人船自主航行控制的发展.
参考文献
无人船艇的发展及展望
[J].
The development and prospect of unmanned craft
[J].
Global path planning for autonomous ship: a hybrid approach of fast marching square and velocity obstacles methods
[J].DOI:10.1016/j.oceaneng.2020.107793 [本文引用: 1]
基于PMSM的双螺旋桨USV推进系统建模与仿真
[J].
Modeling and simulation of twin-propeller unmanned surface vehicle propulsion system based on PMSM
[J].
空泡螺旋桨诱导的双桨船脉动压力数值预报
[J].
Numerical prediction of pressure fluctuations induced by cavitating propeller on twin-screw ship
[J].
基于船-桨-舵组合系统舵球节能效果数值预报
[J].
Numerical prediction of rubber energy saving effects based on boat-propeller-rudder system
[J].
基于CFD方法的桨舵干扰非定常水动力性能研究
[J].DOI:10.3969/j.issn.2095-2783.2017.07.001
Unsteady hydrodynamic performance of propeller and rudder system studied by CFD
[J].DOI:10.3969/j.issn.2095-2783.2017.07.001
Evaluation of hydrodynamic performance of pre-swirl and post-swirl ESDs for merchant ships by numerical towing tank procedure
[J].DOI:10.1016/j.oceaneng.2019.02.067 [本文引用: 1]
基于MRF方法和滑移网格的螺旋桨水动力性能研究
[J].
Study on hydrodynamic performance of propeller based on MRF model and sliding mesh
[J].
基于RANS法的船舶动力及自由运动预报
[J].
Prediction of ship resistance and free motion based on RANS method
[J].
基于CFX的螺旋桨激振力数值预报研究
[J].
Numerical simulation of the propeller-induced force based on CFX
[J].
近自由液面螺旋桨吸气数值模拟
[J].
Numerical simulation of propeller ventilation near the free surface
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}