双桨无人船转弯半径预报
Prediction of turning radius of autonomous ship with two propellers
双桨无人船转弯半径预报 |
| 王雄东,彭章明,潘华辰,田晓庆,朱泽飞,冷建兴 |
|
Prediction of turning radius of autonomous ship with two propellers |
| Xiong-dong WANG,Zhang-ming PENG,Hua-chen PAN,Xiao-qing TIAN,Ze-fei ZHU,Jian-xing LENG |
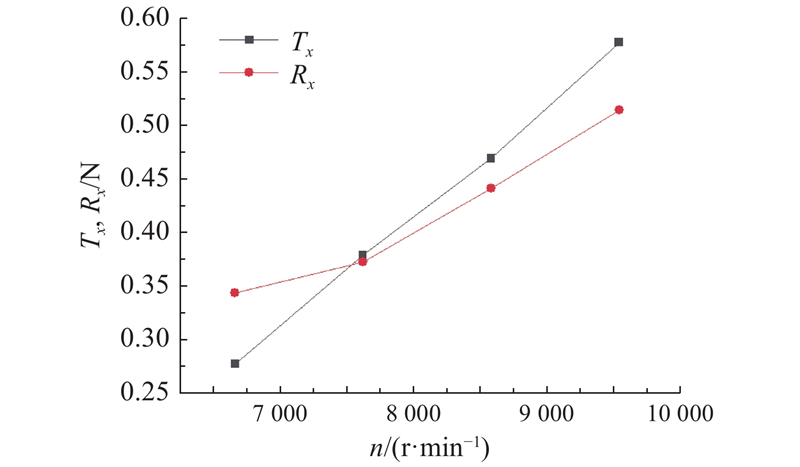
| 图 8 当转速为6 500~10 000 r/min时自航点的确定 |
| Fig.8 Determination of self-navigation match points when rotation speed is between 6 500 and 10 000 r/min |
|
|