

随着机器人技术的快速发展,越来越多的机器人被广泛应用到社会生产的各个领域. 特别是在一些极端的、危险的环境中,如核工厂作业、灾后抢救、危险区域检测等,机器人替代操作人员,不仅能够完成一些非常规的危险的工作,还能够避免人员在意外情况下的伤亡,因此特殊场景下的机器人技术成为目前研究的热点.
高温现场是典型的特殊场景,如冶炼车间、火灾现场、火电厂等,过高的温度容易导致在现场工作的移动机器人过热而产生故障或损坏,因此,机器人在行走过程中既要规避常规的物理障碍,又要规避高温热源的作用范围,以保证工作安全. 虽然目前全局地图中的移动机器人多目标优化路径规划研究较多,但相关算法的设计没有结合高温场景的特点,不能直接用于高温场景中的路径规划. 针对高温场景中机器人的全局路径规划问题,本文通过定义高温热源虚拟障碍,建立混合障碍空间模型,将高温场景中的路径规划问题转化为高温混合障碍空间中受约束的多目标优化问题. 改进NSGA-Ⅱ算法,通过选取优秀非可行解扩展种群,提高种群多样性及种群进化效率,提出新的自适应交叉和变异概率的计算方法. 根据种群个体的代价函数值和种群整体进化进程调整概率,使得种群前期的搜索能力和后期的收敛性得到更好的平衡.
1. 考虑虚拟障碍的混合空间建模
1.1. 热源虚拟障碍定义
在常规路径规划中,一般根据实体障碍物判断空间区域是否可以通过. 在高温场景中,热源周围的高温空间区域虽然没有实体存在,但机器人不能通过该区域或者需要以一定的安全代价通过. 高温区域虽然与实体障碍不同,但对机器人路径规划产生了相似影响,因此将热源及周围的高温空间区域定义为虚拟障碍,虚拟障碍的温度特性对机器人的通过性和安全代价的大小有直接影响.
高温场景可以看作是在常规场景的基础上,叠加了由单个或多个高温热源为中心形成的温度场,从热源中心向四周温度逐渐降低,且温度变化梯度大的区域集中在热源附近[12]. 距离热源越近温度越高,机器人通过障碍空间区域时产生的安全代价将升高,直至完全无法通过,与热源距离较大的区域接近常温,不会对机器人产生安全影响,可以看作常温区域.
实际温度场复杂多变,难以准确描述,因此采用式(1)简化模拟平面温度场. 稳态条件下单个热源形成的虚拟障碍的平面温度场中一点的理想温度
式中:
式中:
1.2. 混合障碍空间建模
高温场景中既有常规实体障碍,又有热源虚拟障碍,两者与无障碍区域共同构成了混合障碍空间. 设混合障碍空间为
在混合障碍空间建模中,为了简化问题,将混合障碍空间投射到二维平面并进行栅格划分,使用平面栅格集合
根据移动机器人水平投影定义栅格尺寸,则在路径规划中可以将每个栅格看作单位点. 根据物理障碍的位置数据和热源虚拟障碍的温度及位置数据,采用灰度统一描述栅格属性. 无障碍空间所在栅格对应的灰度最小,约束空间
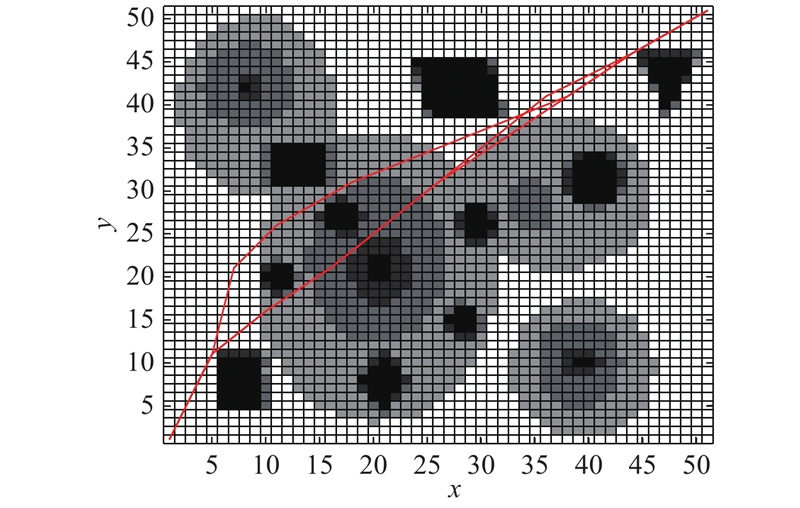
由于栅格的分辨率不同,内部区域存在温度差异,取栅格范围内的最大灰度作为矩阵元素值. 由于灰度最大时为白色,最小时为黑色,为了更直观地反映空间特性,混合障碍空间模型图像以灰度取反显示. 如图1所示为理想状态下混合障碍空间模型示意图. 图中,圆形区域为热源虚拟障碍,2个深黑色的方形区域为实体障碍,其他为无障碍区域. 实际环境监测可能无法得到理想状态下线性的温度数据,因此高温虚拟障碍物建模会出现温度梯度性变化的情况.
图 1
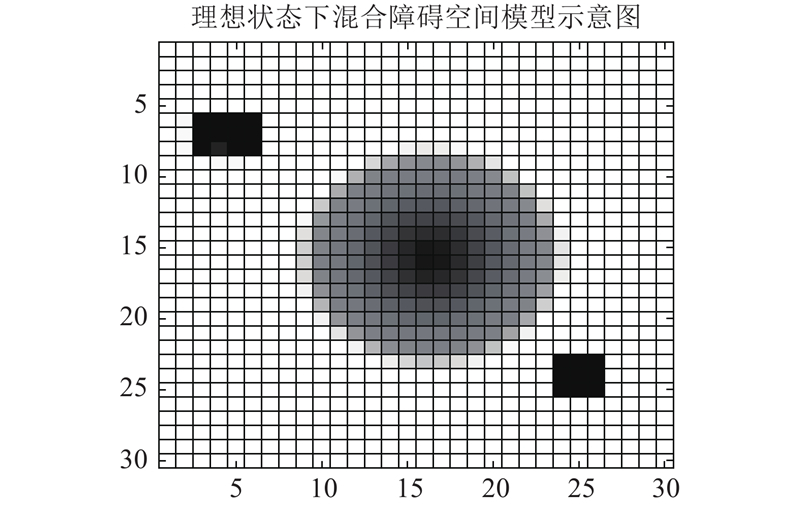
图 1 理想状态下混合障碍空间模型的示意图
Fig.1 Schematic diagram of mixed obstacle space model in ideal state
1.3. 考虑温度代价的路径表达
1.3.1. 路径规划的代价分析
高温混合障碍空间中的路径规划在保证机器人不经过约束空间的前提下,要使路径尽可能短,温度累计影响尽可能小,即距离代价和温度代价都尽量低. 在路径规划过程中,若要使路径尽量短以缩短经过时间,可能需要经过温度较高的虚拟障碍空间,造成的温度代价升高. 若要尽量避免经过温度较高的虚拟障碍空间,则可能使路径长度增加,造成距离代价升高. 路径规划需要同时考虑路径的距离代价和温度代价2个相互矛盾的指标,属于典型的多目标优化问题.
距离代价采用传统路径规划中的定义方式,温度代价以栅格的温度作为量化依据. 当栅格温度为常温时,温度代价为0. 当栅格点属于可通过的热源虚拟障碍区域时,温度代价与所在栅格温度成正比. 若栅格点温度过高,即属于约束空间时,虽然经过该栅格点的路径将判定为非可行路径,但同样需要计算该点的温度代价,作为后续算法改进的基础. 该类型栅格点的温度代价计算公式,与可通行区域的温度代价计算公式不同. 各类型栅格点的温度代价计算公式如下:
式中:
1.3.2. 路径长度与温度代价函数
式中:
若将路径的
式中:
式(7)表达的路径可以通过
在路径规划过程中,可以用路径的
采用欧氏距离表示式(7)的路径长度,第
路径总长度
路径的温度代价表示温度对机器人的影响程度. 将整条路经上所经栅格点的温度代价(见式(6))进行叠加,得到路径的累积温度代价:
式中:
2. 对NSGA-Ⅱ算法的改进
2.1. 基于优秀非可行解的种群扩展
设种群规模为
在算法执行前期,可行解数量很少,需要充分利用非可行解维持种群规模. 若可行解数量
在算法执行中期,可行解与非可行解数量都很充足,即可行解数量
种群中的2种解集数量关系如下:
2.2. 交叉和变异概率的改进
式中:
上述方法都只针对单一因素进行改进,存在一定的局限性. 结合以上2种方法,采用正弦自适应交叉变异概率[23],针对不同迭代时期赋予不同的权重.
式中:
由于本文解决的是双目标优化问题,具有2个代价函数值,在交叉和变异中将产生相应的2个概率,即
在种群迭代前期,整体的交叉和变异概率较大,本文算法增大了种群的搜索能力,能够根据种群个体自身的代价函数值进行概率调整,尽量保存优良个体. 在迭代中后期,种群整体的交叉变异概率减小,利用改进算法保证了种群的收敛性. 该阶段种群个体代价函数值将越来越集中,改进算法在自适应调节的基础上引入sin函数,所得概率整体分布更加离散,且交叉和变异概率出现较大值,提高加入新个体的概率,使得种群具有跳出局部最优解的能力. 改进的自适应交叉和变异概率既能够平衡种群前期的搜索能力与后期的收敛性,又能够防止种群陷入局部最优解.
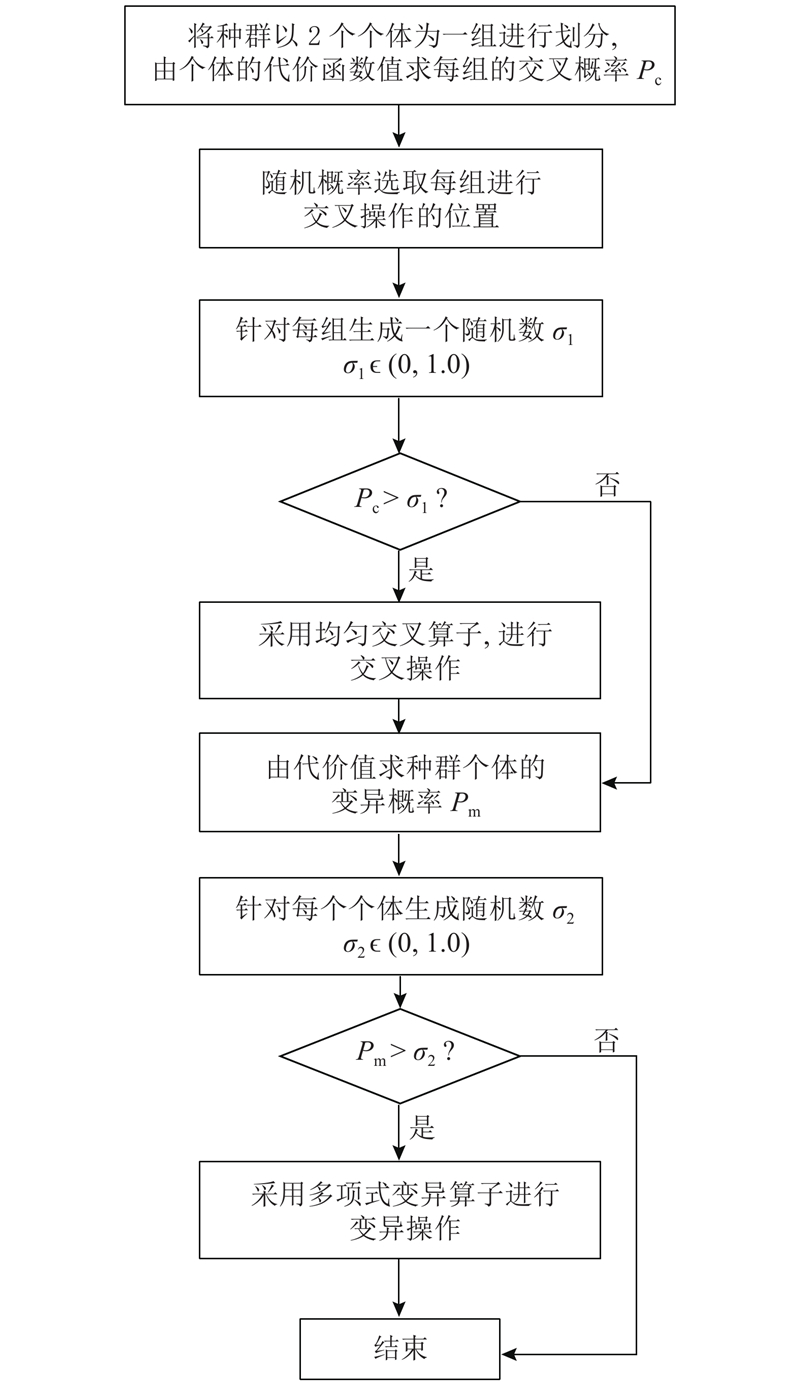
基于改进交叉变异概率的种群交叉变异操作具体步骤如图2所示.
图 2
2.3. 路径规划流程
根据以上算法改进,针对高温场景建立混合障碍空间的路径规划流程如下.
1)初始化算法的参数,包括
2)初始化种群
a)随机生成
b)对矩阵每行进行升序排列,矩阵每行代表1条路径的
c)求
3)设置
4)使用改进的自适应交叉和变异概率,对种群
a)计算种群的路径长度代价与温度代价函数值,求得每组交叉个体的交叉概率.
b)交叉算子采用均匀交叉算子,随机概率选取每组交叉个体进行交叉操作的位置,交叉概率与随机数比较判定是否进行交叉操作.
c)计算种群的路径长度代价与温度代价函数值,求取种群个体的变异概率.
d)变异算子采用多项式变异算子,比较变异概率与随机数,判定是否进行变异操作.
e)对种群个体数值进行取整.
f)越界处理:
生成子代种群
5)
6)遍历种群个体,判断约束条件
7)分别对可行解集和非可行解集进行快速非支配排序,计算拥挤度.
8)通过精英保留策略选择规定数量的可行解与非可行解个体,生成新的父代种群
9)当前迭代次数增加
3. 仿真与分析
图 3
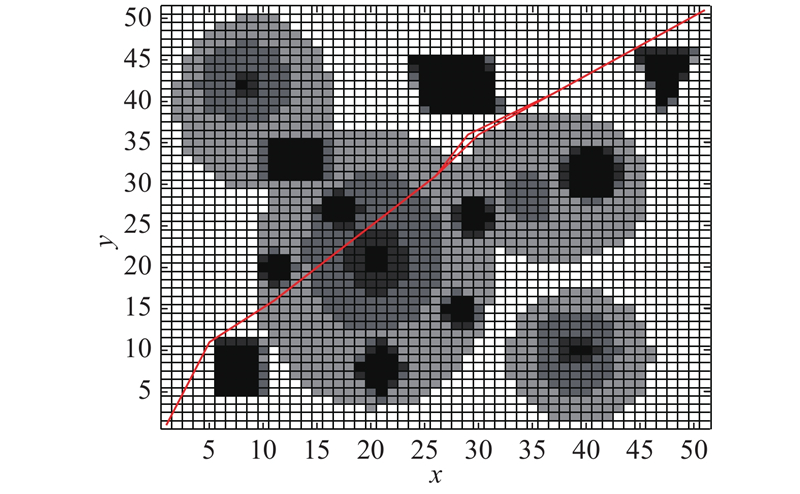
表 1 3种算法的参数设置
Tab.1
| 算法 | N | Pc | Pcmax | Pcmin | Pm | Pmmax | Pmmin | l |
| NSGA-Ⅱ算法 | 100 | 0.6 | − | − | 0.05 | − | − | 10 |
| 文献[22]算法 | 100 | − | 0.8 | 0.4 | − | 0.1 | 0.01 | 10 |
| 本文改进算法 | 100 | − | 0.8 | 0.4 | − | 0.1 | 0.01 | 10 |
图 4
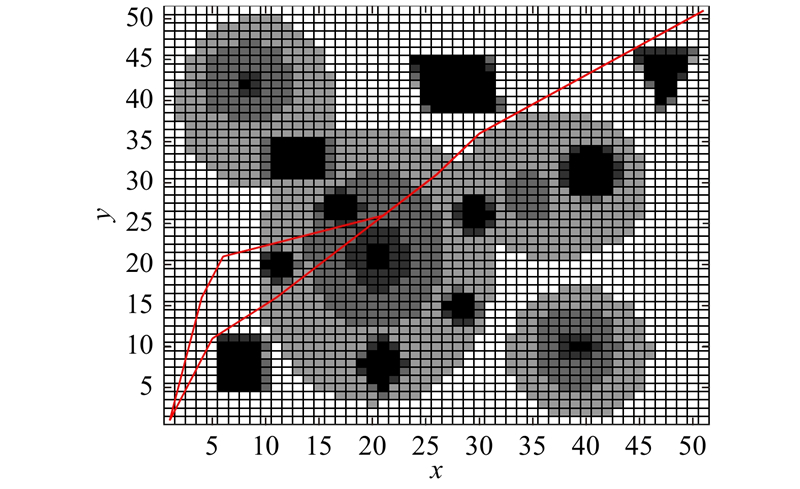
图 5
利用3种算法所得的非支配解路径比较显示可知,三者解集的收敛性均较好,但本文改进算法和文献[22]算法的解集包含了原NSGA-Ⅱ算法的解集,因此2种改进算法的解更具有多样性.
表 2 最优路径的代价比较
Tab.2
| 算法 | LC | CT |
| NSGA-Ⅱ算法 | 71.8 | 660.6 |
| 文献[22]算法 | 72.6 | 510.2 |
| 本文改进算法 | 75.0 | 406.2 |
迭代过程中3种算法所得解的路径长度代价与温度代价如图6所示. 以相邻迭代代价函数值偏差小于阈值的代数作为总迭代次数,以算法初期代价函数值降低比例大于阈值的代数作为快速进化迭代次数,总迭代次数Gt与快速进化迭代次数Gf作为种群迭代过程评价指标,如表3所示[15]. 可知,3种算法在迭代前20次进化速度都较快,在初期搜索性能较好,能够快速搜索全局较优解. 原NSGA-Ⅱ算法和文献[22]算法分别在第50次和第48次迭代之后所得的解趋于平稳,虽然总迭代次数较小,但是从所得最优路径的结果来看,这2种算法所得的解较本文改进算法所得的解差,因此前2种算法表现为早熟收敛,未能有效跳出局部最优解. 本文改进算法在第50~80次迭代时,能够出现较大的变化且逐渐生成更符合问题要求的路径,避免了早熟的问题. 在第80次之后,利用本文改进算法所得的解趋于平稳,表明算法后期的收敛性较好.
图 6
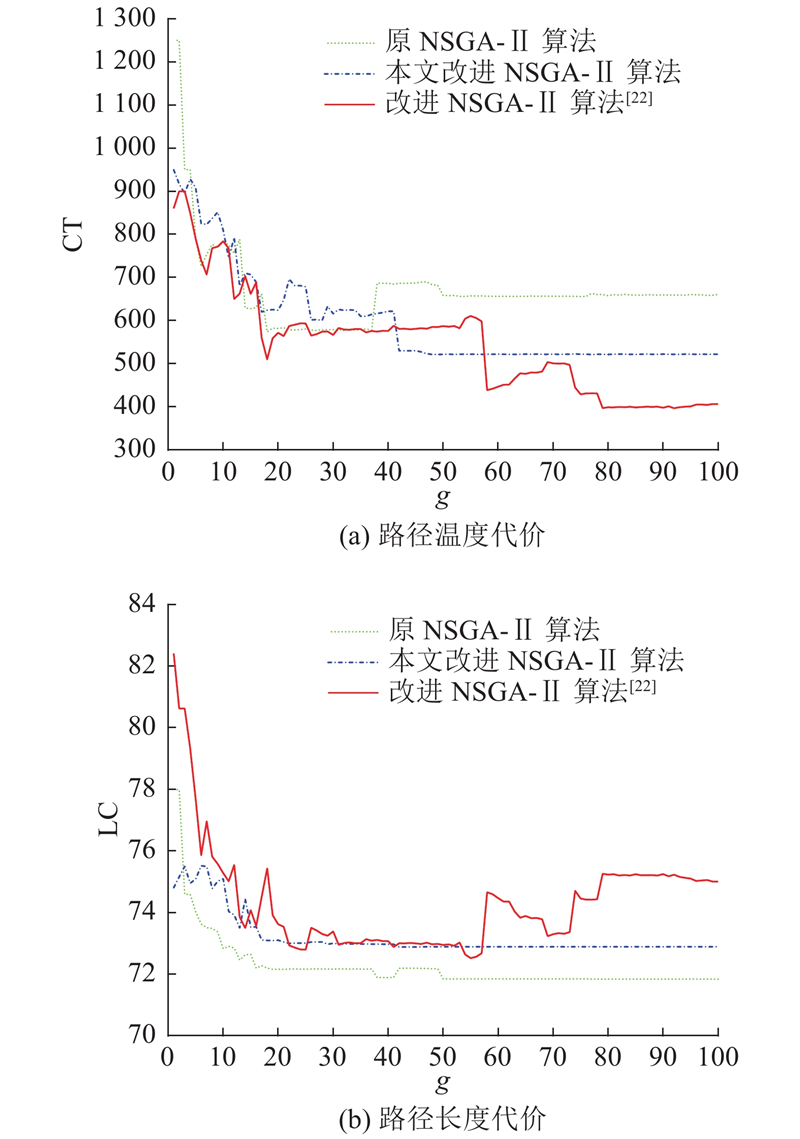
图 6 迭代过程中3种算法所得解的代价值
Fig.6 Cost value of solutions obtained by three algorithms in iterative process
表 3 种群迭代过程的比较
Tab.3
| 算法 | Gf | Gt |
| 原NSGA-Ⅱ算法 | 18 | 50 |
| 文献[22]的改进算法 | 17 | 48 |
| 本文改进算法 | 18 | 80 |
上述对比分析表明,本文改进算法在初期的搜索性能较好;在中期可以达到较高的交叉变异概率,提高加入新个体的概率,跳出局部最优解,且优秀非可行解集的利用能够进一步增强算法的全局搜索能力;该算法在后期的收敛性能较优秀. 提出的改进算法针对高温场景中的路径规划问题更加有效.
4. 结 语
本文研究高温场景中的移动机器人全局路径规划问题,除了对常规障碍物的规避外,重点研究高温热源对路径规划的影响,以保证机器人工作过程中的安全性. 研究高温场景的特点,提出热源虚拟障碍以及混合障碍空间的定义与模型,为后续的路径规划提供了依据. 通过分析高温场景的全局路径规划特点,提出需要同时考虑路径长度和温度2个因素,且二者的寻优存在一定的矛盾性,因此将高温场景全局路径规划问题转化为高温混合障碍空间中考虑路径长度代价和温度代价的双目标优化问题. 由于热源虚拟障碍物的存在,使得传统的NSGA-Ⅱ算法难以平衡种群前期的搜索能力和后期的收敛性,容易陷入局部最优. 本文改进了NSGA-Ⅱ算法,选择优秀的非可行解扩展种群,提出新的自适应的变异交叉概率. 仿真结果表明,在高温混合障碍空间中,利用本文改进算法能够有效规划出兼顾长度代价和温度代价的最优路径,相比NSGA-Ⅱ算法和其他改进算法所得最优路径的路径长度虽然略大,但是温度代价大幅降低,能够有效跳出局部最优,故本文改进算法更适用于解决高温场景全局路径规划问题.
参考文献
Heuristic approaches in robot path planning: a survey
[J].DOI:10.1016/j.robot.2016.08.001 [本文引用: 1]
Mobile robot path planning using membrane evolutionary artificial potential field
[J].DOI:10.1016/j.asoc.2019.01.036 [本文引用: 1]
A two-layered subgoal based mobile robot navigation algorithm with vision system and IR sensors
[J].DOI:10.1016/j.measurement.2010.12.002 [本文引用: 1]
Robot path planning in uncertain environment using multi-objective particle swarm optimization
[J].DOI:10.1016/j.neucom.2012.09.019 [本文引用: 4]
Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm
[J].DOI:10.1016/j.eswa.2018.08.008 [本文引用: 1]
Simulated annealing with adaptive neighborhood: a case study in off-line robot path planning
[J].DOI:10.1016/j.eswa.2010.08.084 [本文引用: 1]
基于改进萤火虫算法的移动机器人多目标路径规划
[J].
Multi-objective path planning for mobile robot based on improved firefly algorithm
[J].
Car-like mobile robot path planning in rough terrain using multi-objective particle swarm optimization algorithm
[J].DOI:10.1016/j.neucom.2017.12.015 [本文引用: 2]
基于NSGA-Ⅱ算法的AUV三维全局路径规划
[J].
Three-dimensional global path planning based on NSGA-II algorithm for AUV
[J].
Minimum collective dose based optimal evacuation path-planning method under nuclear accidents
[J].DOI:10.1016/j.anucene.2020.107644 [本文引用: 1]
选煤厂暗道多热源叠加作用对通风排尘特性的影响
[J].
Analysis of multithermo-sources superimposed effect onventilation dedusting in coal preparation plant
[J].
自适应遗传算法在机器人路径规划的应用
[J].DOI:10.3778/j.issn.1002-8331.1912-0062 [本文引用: 3]
Application of adaptive genetic algorithm in robot path planning
[J].DOI:10.3778/j.issn.1002-8331.1912-0062 [本文引用: 3]
动态邻居维度学习的多目标粒子群算法
[J].DOI:10.3778/j.issn.1002-8331.1606-0137 [本文引用: 1]
Multi-objective particle swarm optimization based on dynamic neighborhood for dimensional learning
[J].DOI:10.3778/j.issn.1002-8331.1606-0137 [本文引用: 1]
An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach part I: solving problems with box constraints
[J].DOI:10.1109/TEVC.2013.2281535 [本文引用: 1]
A fast and elitist multiobjective genetic algorithm: NSGA-II
[J].DOI:10.1109/4235.996017 [本文引用: 1]
基于改进遗传算法的AGV路径规划
[J].
AGV optimal path planning based on improved genetical algorithm
[J].
基于正弦式自适应遗传算法的堆垛机路径优化研究
[J].DOI:10.3969/j.issn.1001-2257.2019.09.014 [本文引用: 1]
Research on path optimization of stacker based on sinusoidal adaptive genetic algorithm
[J].DOI:10.3969/j.issn.1001-2257.2019.09.014 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}