

岩羊分布于贺兰山山脉,具有优越的攀爬能力,且奔跑速度快,运动步态稳定. 与马、山羊和犬等四足动物相比,岩羊可在自然界中陡峭的斜坡上行走,坡度最大接近90°[1-2]. 岩羊优越的攀爬性能为研制具有优越攀爬性能的仿生四足机器人提供了优异的生物蓝本. 国内外学者以多种四足动物为仿生对象,对仿生四足机器人进行大量研究,取得了优异的成果. 例如,以狗为仿生对象的BigDog[3]、绝影、Laikago和以猎豹为仿生对象的Cheetah[4]、Mini Cheetah[5],但是它们仍与自然界中的动物有一定差距。目前的四足机器人大都不具备优越的攀爬性能,很难在自然界中坡度大于30°的斜坡上行走. 如何更好地揭示腿足动物的运动机理,为提高仿生四足机器人的攀爬性能提供理论基础,是目前四足机器人研究的热点[6].
四足动物经过漫长的进化,其肢体结构、运动模式以及肢体调节能力已高度适应自然界. 动物的足作为腿足动物运动时与地面唯一接触的部位,在动物的运动中起着重要的作用. 腿足动物的运动力学是分析腿足动物运动规律的重要方法之一,可以揭示足部触地后的调整和适应规律[7]. 国内外学者的研究表明,压力板测得的垂直地反力数据可以从运动力学的角度出发,分析足触地后的调整和适应规律. 田为军等[8]分析德国牧羊犬在平地慢走和小跑时关节角和地反力的变化规律. 钱志辉等[7]分析德国牧羊犬在正常、对角小跑和跳跃等3种步态下的足−地接触规律:从正常到跳跃,前肢的垂直地反力增加,且前肢的主要受力区域发生转变. Stadig等[9-10]分析猫、犬爪的垂直地反力分布,发现爪的前侧比后侧承受更多的垂直地反力. Oosterlinck等[11-13]研究发现马左右蹄的垂直地反力具有对称性,前蹄的垂直地反力峰值大于后蹄的,马在快跑时左右蹄垂直地反力的对称性下降. Rifkin等[14-15]研究山羊、绵羊在平地行走时的垂直地反力,发现前蹄比后蹄承受的垂直地反力更大,同时还发现羊与马、犬的垂直地反力分布规律相似.
虽然,研究者们对犬、马和羊等四足动物的运动力学进行了大量的有益研究,但是目前关于在不同坡度上行走的四足动物的运动力学分析却鲜见报道. 本文以岩羊为研究对象,搭建垂直地反力采集系统,测量其在平地和不同坡度上行走时蹄部的垂直地反力. 计算垂直地反力峰值和垂直冲量,分析在不同坡度上行走时岩羊蹄部垂直地反力的变化特征,研究岩羊登山时四肢对垂直地反力的调节作用.
1. 材料与方法
1.1. 实验动物
实验选择经兽医检验后确定的健康岩羊,如图1所示. 岩羊属国家二级保护动物,禁止交易和个人饲养. 本实验的岩羊源自长春市动植物公园,在群体中筛选5只青年岩羊作为训练样本,经过训练与预实验后发现岩羊难于训练,仅有1只经饲养员长期人工饲养的3岁龄雄性岩羊,易于进行实验前的训练,将其选做实验样本,体重为38.2 kg. 这只岩羊与园内所有岩羊生活在一起,经过长期对这一群体在平地行走时运动状态的观察,认为这一群体的差异性较小,在一定程度上可以认为这只岩羊代表了群体的部分特性,这与Lewinson等[16]关于雪羊爬山力学描述实验的样本获取方法类似. 为了减小实验误差,对单样本进行了大量实验,以期获得更为可靠的实验数据.
图 1

1.2. 实验设计
设计可以实现斜坡角度变化的实验系统,如图2所示,该系统包括可变坡度实验台架、压力采集系统和相机系统. 实验时可变坡度实验台架的倾斜通道角度以每档5°从0°线性增加到35°. 实验用的岩羊有一个月的时间适应测试环境,在这个月内每5天改变一次坡道角度. 每次实验开始之前,实验人员牵引羊在坡道上往返行走若干次,使岩羊在实验时能够处于正常的行走状态.
图 2
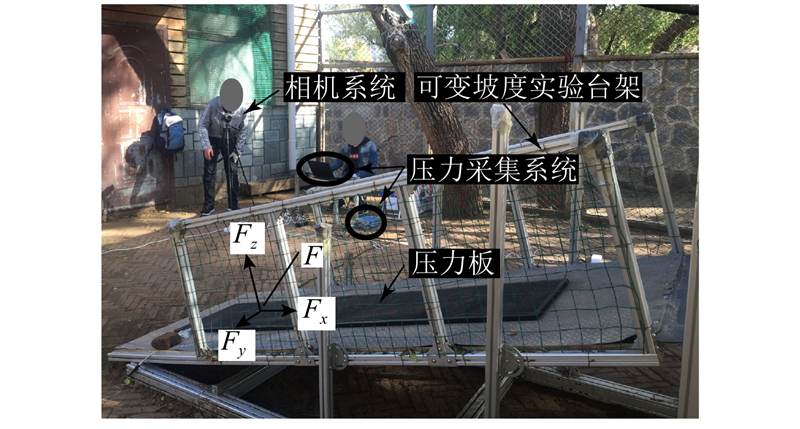
图 2 垂直地反力采集实验现场图
Fig.2 Scene photograph of vertical force acquisition experiment
在坡道右侧嵌入2 093 mm×469 mm的压力板(Advanced and Hi-End,RSscan Internation公司),用来采集岩羊在不同角度的斜坡上行走时的垂直地反力. 压力板内部镶嵌有26 778个7.62 mm×5.08 mm的传感器,传感器的采样频率为126 Hz. 为了保护压力板内部的传感器并增加压力板的摩擦力,防止岩羊在行走中出现滑动,在压力板表面覆盖厚度为2 mm的平行纹理橡胶,摩擦系数为0.62. 图2中,F为羊蹄施加于压力板上的力,Fx、Fy、Fz分别为F在x、y、z方向的分力,其中Fz为压力板采集的垂直地反力. 垂直地反力始终垂直于压力板,因此压力板在平地和斜坡上均可使用. 在采集垂直地反力的同时,使用相机(SONY HDR-CX680,日本索尼公司)记录实验过程,以确定压力板采集的数据与岩羊四肢的对应关系,并便于通过视频计算岩羊的行走速度、确定该次实验的有效性. 在实验过程中,实验人员走在通道的左侧,岩羊走在通道的右侧,实验人员和岩羊沿直线上坡. 同一坡度上的所有实验均在同一天内完成,岩羊在压力板上至少行走10次,以获得足够数量的有效运动数据. 每次实验开始前岩羊有5~10 min的休息时间,以保证数据的准确性.
1.3. 数据处理
四足动物的运动步态是指四肢运动的模式和顺序[17],对步态的分析包括运动学分析(如步速、步长、关节位置、关节角速度等)和运动力学分析(如地面反作用力、关节扭矩、足底压力分布等). 本文主要分析的是步态参数运动力学中的垂直地反力. 借助相机系统记录的实验过程视频,挑选匀速且岩羊头部居中的视频作为有效实验. 从岩羊前蹄落地开始到再次落地结束,作为1个步态周期. 将每个步态周期内前蹄跨过的距离与步态周期时长之比定义为岩羊行走速度. 每档坡度,在有效实验中选取速度最接近(速度的标准差在速度均值的±10%以内)的5个数据,作为最终实验样本进行数据分析.
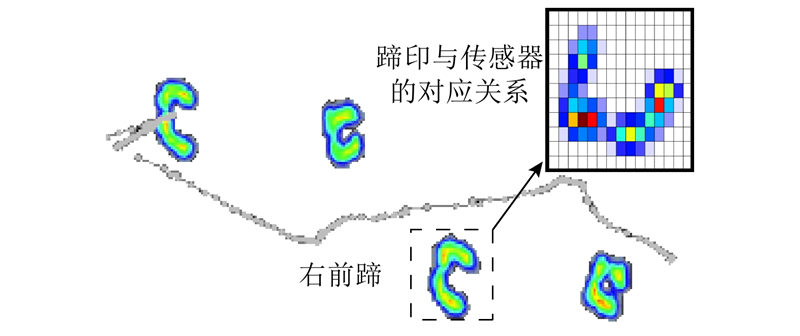
压力板可以连续获得岩羊蹄部垂直地反力的时间序列,一次实验过程中记录的一串蹄印如图3所示. 图中,虚线框内为压力板生成的蹄印,实线框内为蹄印下对应的传感器. 将传感器获得的压力数据导出,用MATLAB(R2017b,MathWorks公司)进行数据分析. 将每一帧m个传感器测得的压力Fi(i=1,2,3,···,m)求和得到当前帧的垂直地反力Fz,进而求得垂直地反力的力−时间序列.
图 3
垂直地反力分布是运动力学的重要组成部分,生物的运动力学分析是仿生四足机器人运动力学建模的基础. 本文对垂直地反力的峰值(peak vertical force,PVF)和垂直冲量(vertical impulse,VI)2个参数进行统计分析. 垂直地反力峰值是指在整个支撑相垂直地反力的力−时间序列中,垂直地反力的最大值,体重标准化后,单位为N/kg. 垂直冲量为力−时间曲线在羊蹄的触地期间的积分,体重标准化后,单位为N·s/kg. 冲量表示岩羊四肢因垂直地反力作用增加的垂直方向的动量.
采用单因素方差分析中的Bonferroni法比较垂直地反力峰值和垂直冲量,该方法可同时对多个变量进行两两比较. 检验垂直地反力峰值和垂直冲量在前、后蹄和左、右蹄是否具有显著性差异(显著性水平P<0.05).
2. 实验结果与分析
2.1. 蹄部所受垂直地反力统计分析
已有研究表明,肢体的速度是影响肢体垂直地反力的重要因素[9]. 为了保证实验数据的有效性,对岩羊在不同坡度的斜坡上行走时的速度进行统计分析,使各坡度上的样本具有相似的速度,以减小岩羊行走时速度变化对垂直地反力的影响. 本研究将行走速度定义为从首次触地开始到再次触地结束,右前蹄跨过的距离与所用时间的比值. 岩羊在8档坡度上行走,最终选定的实验组行走速度分别为1.11±0.08、1.12±0.11、1.05±0.02、0.78±0.03、0.99±0.07、1.31±0.11、1.23±0.12、1.35±0.09 m/s. 该速度为岩羊在各坡度运动时的自适应速度,当各档坡度上实验组内的速度偏差在10%以内时,选定实验组的数据为有效实验数据.
压力板可获得岩羊的垂直地反力信息. 如图4所示为岩羊在5°斜坡上行走时岩羊蹄的垂直地反力与时间的关系曲线. 图中,T为时间所占支撑相时长的百分比.
图 4
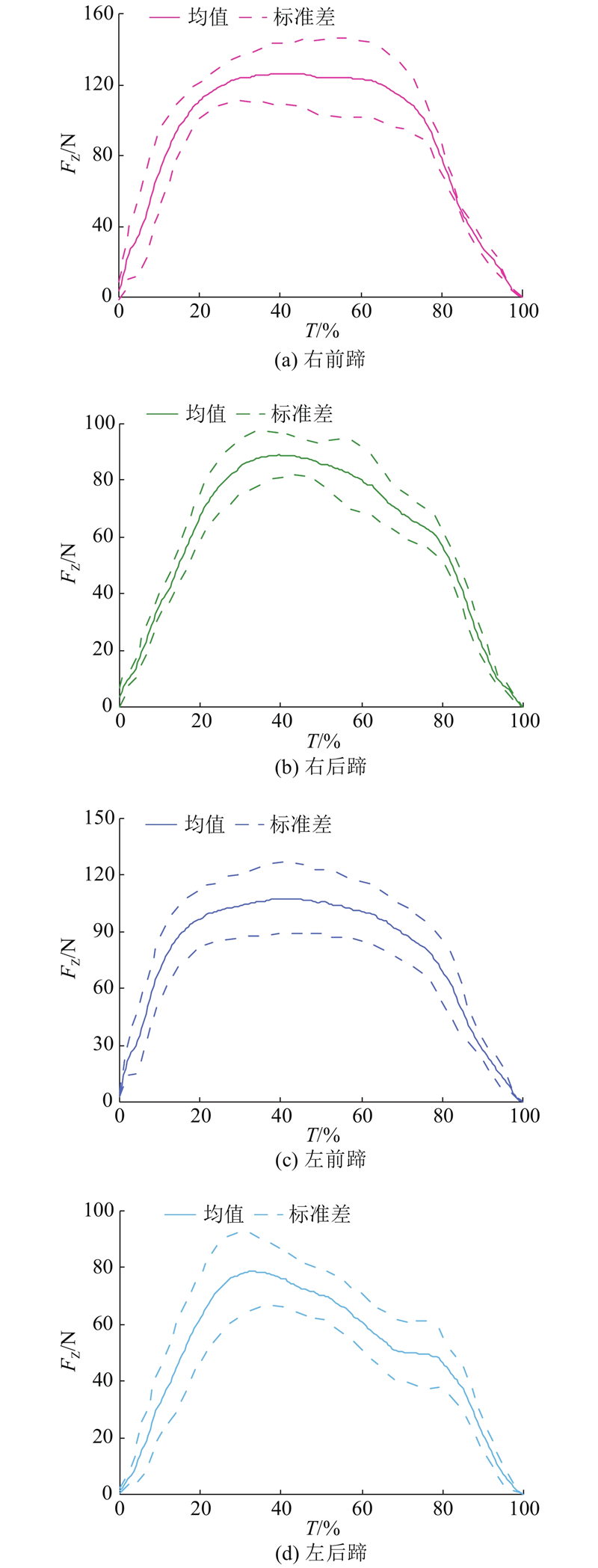
表1、2分别为标准化后的岩羊蹄垂直地反力峰值、垂直冲量. 表中,
表 1 岩羊蹄的垂直地反力峰值
Tab.1
| α/(°) | Fpyq/(N·kg−1) | Fpyh/(N·kg−1) | Fpzq/(N·kg−1) | Fpzh/(N·kg−1) |
| 0 | 4.75±0.59 | 3.65±0.14 | 4.79±0.48 | 3.70±0.31 |
| 5 | 3.15±0.21 | 2.39±0.19 | 2.69±0.14 | 2.08±0.34 |
| 10 | 2.66±0.33 | 2.39±0.29 | 3.04±0.73 | 2.46±0.63 |
| 15 | 3.72±0.15 | 3.26±0.26 | 3.24±0.49 | 2.48±0.31 |
| 20 | 2.25±0.15 | 2.62±0.27 | 3.27±0.29 | 2.78±0.20 |
| 25 | 2.34±0.25 | 3.01±0.30 | 2.34±0.37 | 2.33±0.26 |
| 30 | 1.81±0.47 | 2.80±0.50 | 2.40±0.32 | 2.64±0.65 |
| 35 | 2.23±0.21 | 2.83±0.34 | 2.61±0.13 | 3.63±0.37 |
表 2 岩羊蹄的垂直冲量
Tab.2
| α/(°) | Iyq/(N·s·kg−1) | Iyh/(N·s·kg−1) | Izq/(N·s·kg−1) | Izh/(N·s·kg−1) |
| 0° | 2.65±0.47 | 1.71±0.22 | 2.66±0.33 | 1.72±0.21 |
| 5° | 1.53±0.39 | 1.03±0.14 | 1.37±0.38 | 0.86±0.23 |
| 10° | 1.04±0.30 | 0.92±0.22 | 1.13±0.13 | 0.99±0.12 |
| 15° | 1.11±0.10 | 0.96±0.19 | 1.13±0.15 | 0.88±0.19 |
| 20° | 0.81±0.11 | 1.08±0.18 | 1.11±0.14 | 0.97±0.14 |
| 25° | 0.77±0.17 | 1.23±0.23 | 0.79±0.15I | 0.87±0.12 |
| 30° | 0.57±0.19 | 1.15±0.18 | 0.73±0.09 | 1.00±0.14 |
| 35° | 0.32±0.06 | 0.73±0.17 | 0.30±0.05 | 0.50±0.09 |
图 5
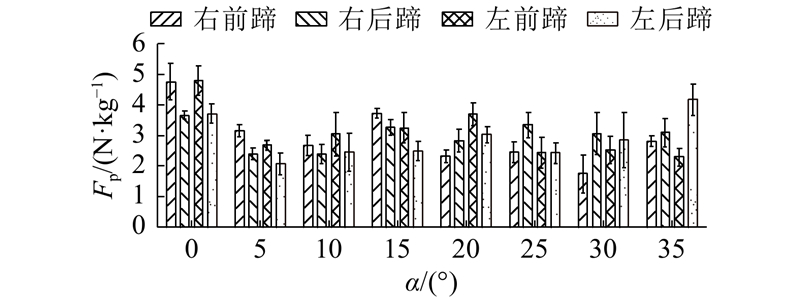
图 5 岩羊蹄垂直地反力峰值统计图
Fig.5 Statistics graph of normalized peak vertical force for sheep's hooves
图 6
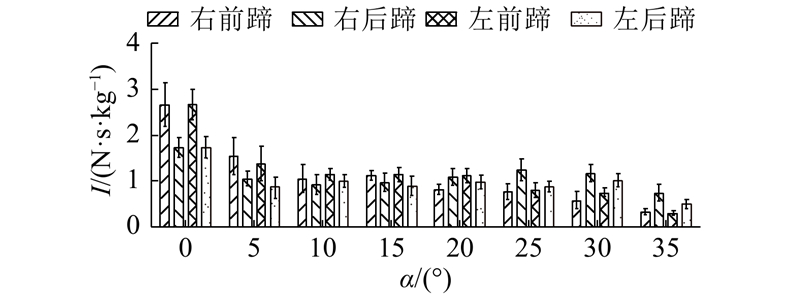
图 6 岩羊蹄垂直冲量统计图
Fig.6 Statistics graph of normalized vertical impulse for sheep's hooves
2.2. 岩羊蹄所受垂直地反力的左右对称性分析
引入左、右蹄的对称性指数对垂直地反力峰值和垂直冲量进行对称性分析. 对称性指数
表3、4分别为垂直地反力峰值和垂直冲量的对称性指数。表中,
表 3 垂直地反力峰值的对称指数
Tab.3
| α/(°) | SFQ/% | SFH/% | α/(°) | SFQ/% | SFH/% | |
| 0 | 99.16 | 98.65 | 20 | 68.81 | 94.24 | |
| 5 | 85.39 | 87.03 | 25 | 100 | 77.41 | |
| 10 | 67.76 | 97.15 | 30 | 75.42 | 94.29 | |
| 15 | 87.10 | 76.07 | 35 | 85.44 | 77.95 |
表 4 垂直冲量的对称指数
Tab.4
| α/(°) | SIQ/% | SIH/% | α/(°) | SIQ/% | SIH/% | |
| 0 | 99.62 | 99.42 | 20 | 72.97 | 89.81 | |
| 5 | 89.54 | 83.50 | 25 | 97.47 | 70.73 | |
| 10 | 92.04 | 92.93 | 30 | 78.08 | 86.96 | |
| 15 | 98.23 | 91.67 | 35 | 93.75 | 68.49 |
图 7
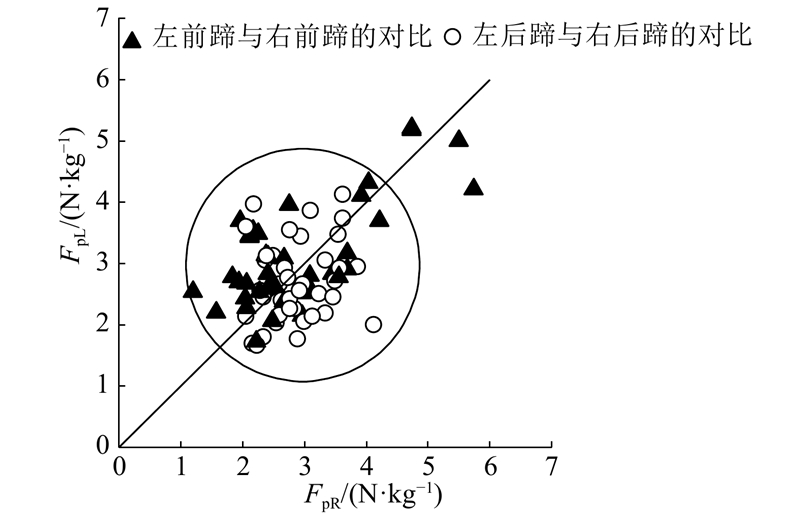
图 7 左、右蹄垂直地反力峰值对比
Fig.7 Comparison of peak vertical force between left hoof and right hoof
图 8
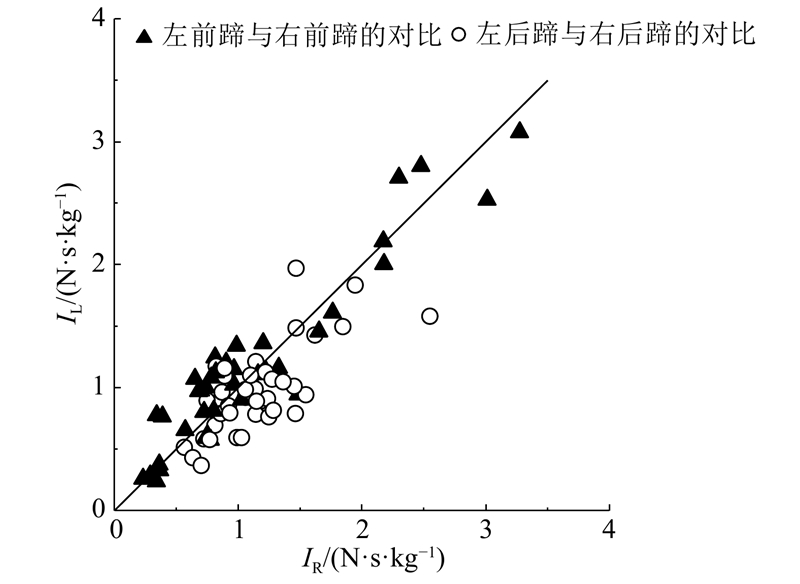
图 8 左、右蹄垂直冲量对比
Fig.8 Comparison of vertical impulse between left hoof and right hoof
使用对称指数评价岩羊运动时在垂直路面方向的运动稳定性。稳定性是指肢体左右两侧垂直方向动量变化的对称性,动量的变化表示肢体左右两侧运动状态的变化,当肢体左右两侧的动量变化相近时,认为岩羊肢体左右两侧运动状态的变化相似,即如果肢体左右两侧触地时运动状态相同,离地时运动状态也相同,肢体两侧具有相同的运动状态,保持肢体左右两侧运动的对称性,也就保持了肢体左右两侧垂直方向的稳定性. 对称性指数为1表示完全对称,此时垂直方向处于完全稳定的运动状态,对称性指数越接近1,运动状态越稳定.
冲量为岩羊四肢触地期间动量的增加值,由此可知,岩羊在不同坡度运动时左右侧能量变化值的对称性高于垂直地反力峰值的对称性. 岩羊在不同坡度运动时,通过垂直地反力和触地时间的耦合,保障垂直方向肢体左右侧动量变化的对称性,即维持垂直路面方向的运动稳定性.
2.3. 岩羊蹄所受垂直地反力的前后差异性分析
引入前、后蹄的差异性指数,分析前、后蹄的垂直地反力峰值和垂直冲量的差异性. 差异性指数
表5、6分别为肢体左右侧的垂直地反力峰值和垂直冲量在前、后蹄的差异性指数. 表中,DFY、DFZ分别为肢体右、左侧垂直地反力峰值在前、后蹄的差异性指数,DIY、DIZ分别为肢体右、左侧垂直冲量在前、后蹄的差异性指数. 由表可知,岩羊在平地行走时,肢体左侧前、后蹄的垂直地反力峰值、垂直冲量的差异性指数分别为1.294 6、1.546 5,肢体右侧前、后蹄的垂直地反力峰值、垂直冲量的差异性指数分别为1.301 4、1.549 7. 由此可知,岩羊在平地行走时,前肢承受更多的力,右前蹄、右后蹄、左前蹄、左后蹄的垂直地反力峰值占体重的比例分别为47.5%、36.5%、47.9%、37.0%. 这与关于犬[7, 10]、羊[14-15]和马[13]的研究结果类似. 原因是四足动物的躯体重心比较靠前,导致前肢的负重比例较大. 但是岩羊前后肢垂直地反力占体重的比例比绵羊小,绵羊前肢、后肢的比例分别为52.5%、38.5%[15].
表 5 垂直地反力峰值的差异性指数
Tab.5
| α/(°) | DFY | DFZ | α/(°) | DFY | DFZ | |
| 0 | 1.301 4 | 1.294 6 | 20 | 0.858 8 | 1.176 2 | |
| 5 | 1.318 0 | 1.293 3 | 25 | 0.777 4 | 1.004 2 | |
| 10 | 1.113 0 | 1.235 8 | 30 | 0.646 4 | 0.909 1 | |
| 15 | 1.141 1 | 1.306 4 | 35 | 0.788 | 0.719 |
表 6 垂直冲量的差异性指数
Tab.6
| α/(°) | DIY | DIZ | α/(°) | DIY | DIZ | |
| 0 | 1.549 7 | 1.546 5 | 20 | 0.745 2 | 1.144 3 | |
| 5 | 1.485 4 | 1.743 0 | 25 | 0.626 0 | 0.908 0 | |
| 10 | 1.130 4 | 1.141 4 | 30 | 0.495 7 | 0.73 | |
| 15 | 1.156 3 | 1.284 1 | 35 | 0.438 4 | 0.6 |
图 9
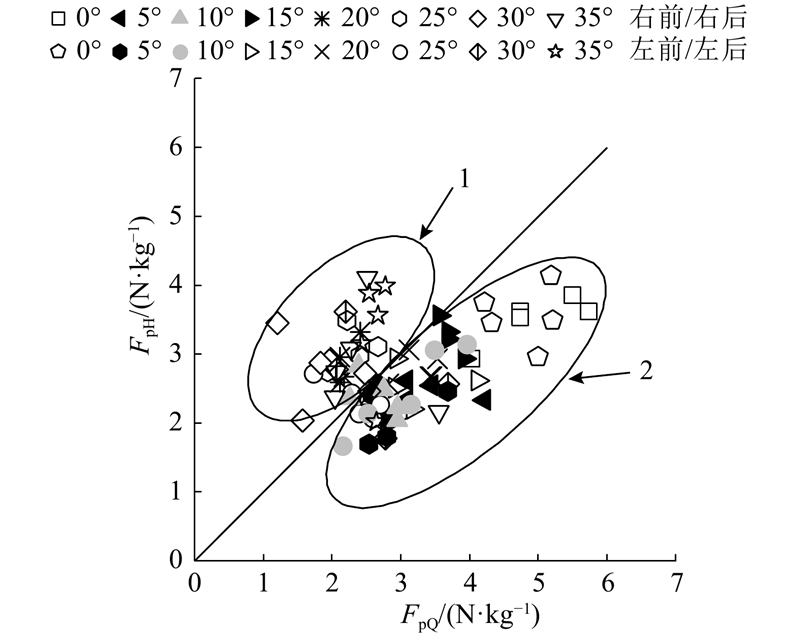
图 9 前蹄与后蹄垂直地反力峰值在不同坡度的对比
Fig.9 Comparison of peak vertical force between front hoof and rear hoof with different slopes
图 10
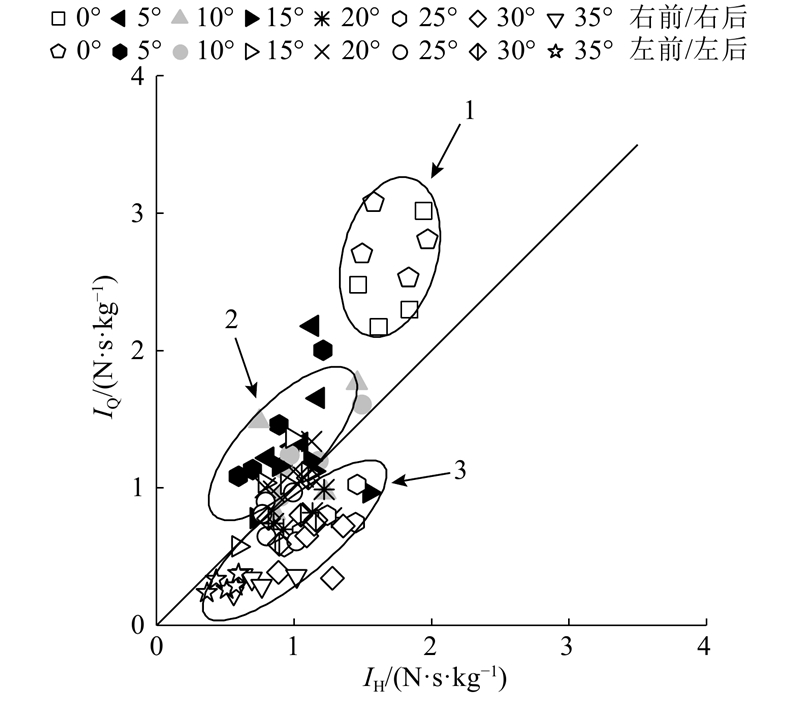
图 10 前蹄与后蹄垂直冲量在不同坡度的对比
Fig.10 Comparison of vertical impulse between front hoof and rear hoof with different slopes
由表5、图9可知,当坡度为0°~15°时,肢体左右侧前、后蹄垂直地反力峰值的差异性指数均大于1,即肢体左右侧前蹄的垂直地反力峰值均大于后蹄. 当坡度为20°~25°时,肢体右侧前、后蹄的差异性指数小于1,肢体左侧前、后蹄的差异性指数大于1,即肢体右侧前蹄的垂直地反力峰值小于后蹄,左侧前蹄的垂直地反力峰值大于后蹄. 当α=30°~35°时,肢体左右侧前、后蹄的差异性指数均小于1,即肢体左右侧前蹄的垂直地反力峰值均小于后蹄. 岩羊肢体右侧垂直地反力峰值的差异性指数从平地时的1.3014减小至30°坡时的0.6464,35°坡时增至0.788. 肢体左侧垂直地反力峰值的差异性指数由平地时的1.2946减小到35°坡时的0.719.
如图11所示为肢体左右侧垂直地反力峰值的差异性指数和垂直冲量的差异性指数随坡度的变化规律. 由图可知,垂直地反力峰值和垂直冲量的差异性指数随着坡度的增加而降低. 对岩羊肢体两侧前后肢垂直地反力峰值和垂直冲量的差异性指数进行线性拟合可知,肢体右、左侧垂直地反力峰值的差异性指数拟合优度分别为0.8714、0.8268,肢体右、左侧垂直冲量的差异性指数拟合优度分别为0.9377、0.8941. 垂直冲量的拟合优度大于垂直地反力峰值的拟合优度. 垂直地反力和垂直冲量的差异性指数随坡度的增加近似线性降低,表明前后蹄垂直地反力的比值随坡度的增加线性降低.
图 11
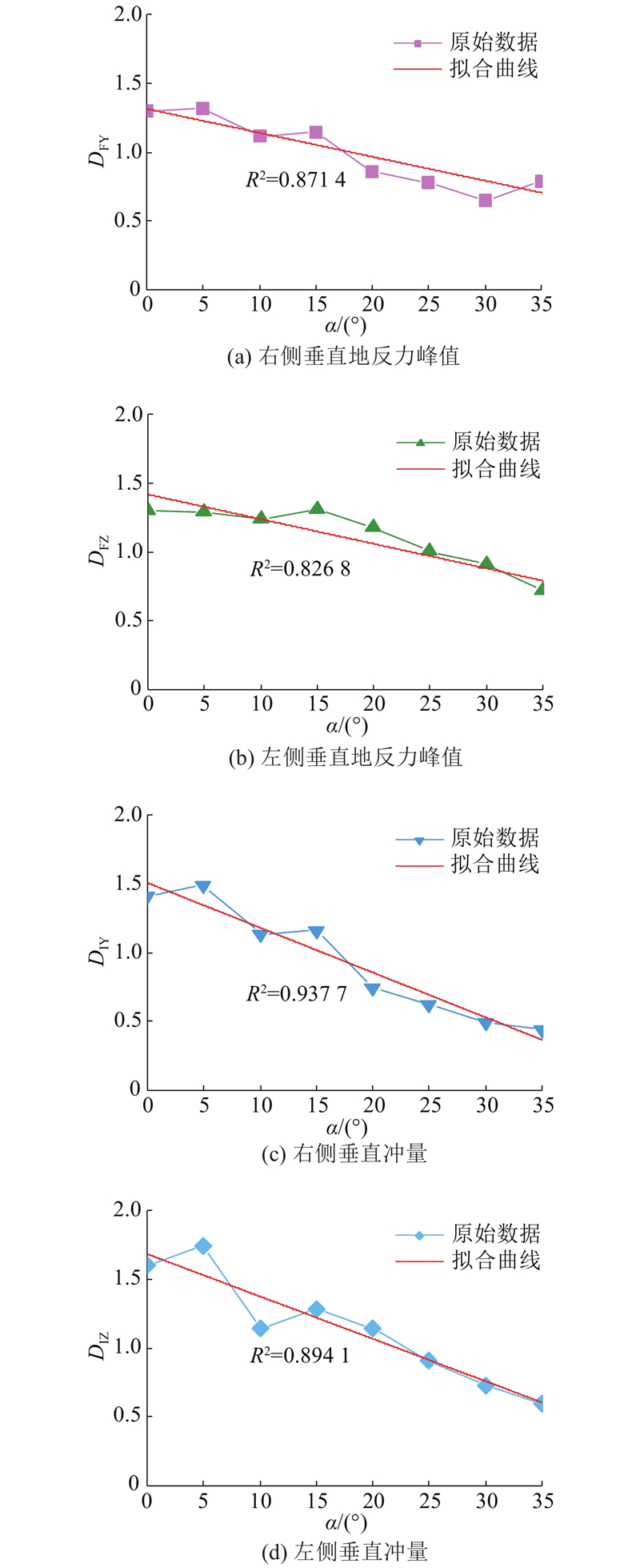
式中:A为岩羊肢体右侧的垂直地反力峰值或垂直冲量的差异性指数−坡度序列,A = (a1,a2,··· ,aj);B为岩羊肢体左侧的垂直地反力峰值或垂直冲量的差异性指数−坡度序列,
由式(3)计算得到垂直地反力峰值、垂直冲量的相似度分别为0.991 1、0.992 5. 相似度接近1,由此可知岩羊肢体左侧前蹄与后蹄垂直地反力的差异性指数和右侧前蹄与后蹄垂直地反力的差异性指数,随坡度的变化规律具有高度的相似性.
3. 结 论
(1)在平地行走时,岩羊前、后蹄左右侧的垂直地反力峰值和垂直冲量完全对称. 随着坡度的增加,左右侧的对称性下降.
(2)在平地行走时,由于躯体结构的特点,岩羊前肢承受更大的垂直地反力和垂直冲量. 随着坡度的增大前肢承受垂直地反力的比例逐渐减小,后肢逐渐增大,均近似呈线性关系. 岩羊在攀爬过程中,将肢体推离地面时,后肢所起的作用大于前肢. 同时,岩羊肢体左右侧的差异性指数随坡度的变化具有高度的相似性.
(3)本文仅研究多坡度下岩羊登山运动时垂直地反力的特征,未解析岩羊登山运动时的动力学模型. 计划采用三维六分力传感器获得岩羊登山时的力学数据,进行动力学建模,进一步解析岩羊登山运动的力学特性.
参考文献
Bigdog, the rough-terrain quadruped robot
[J].DOI:10.3182/20080706-5-KR-1001.01833 [本文引用: 1]
High speed trot-running: implementation of a hierarchical controller using proprioceptive impedance control on the MIT Cheetah
[J].
基于多种步态的德国牧羊犬足−地接触分析
[J].
Foot-ground contact analysis of German shepherd dog in walking, trotting and jumping gaits
[J].
德国牧羊犬的关节角及其地反力
[J].
Joint angles and ground reaction forces of German Shepherd dog
[J].
Gait and jump analysis in healthy cats using a pressure mat system
[J].DOI:10.1177/1098612X14551588 [本文引用: 2]
Vertical force distribution in the paws of sound Labrador retrievers during walking
[J].DOI:10.1016/j.tvjl.2017.01.014 [本文引用: 2]
Use of a stand-alone pressure plate for the objective evaluation of forelimb symmetry in sound ponies at walk and trot
[J].DOI:10.1016/j.tvjl.2008.12.012 [本文引用: 2]
A pressure plate study on fore and hindlimb loading and the association with hoof contact area in sound ponies at the walk and trot
[J].DOI:10.1016/j.tvjl.2010.08.016 [本文引用: 1]
Ground reaction force patterns of Dutch Warmblood horses at normal trot
[J].DOI:10.1111/j.2042-3306.1993.tb02923.x [本文引用: 4]
Use of a pressure-sensing walkway system for biometric assessment of gait characteristics in goats
[J].DOI:10.1371/journal.pone.0223771 [本文引用: 2]
Temporospatial and kinetic characteristics of sheep walking on a pressure sensing walkway
[J].
A descriptive analysis of the climbing mechanics of a mountain goat (Oreamnos americanus)
[J].DOI:10.1016/j.zool.2016.06.001 [本文引用: 2]
The dynamics of quadrupedal locomotion
[J].DOI:10.1115/1.3108436 [本文引用: 1]
Ground reaction force patterns of Dutch Warmblood horses at normal walk
[J].DOI:10.1111/j.2042-3306.1986.tb03600.x [本文引用: 2]
Biomimetic walking mechanisms: kinematic parameters of goats walking on different slopes
[J].DOI:10.1002/cpe.4913 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}