|
|
|
| Heuristic sampling path planning algorithm based on semantic segmentation |
Jiawei PAN( ),Chunli WANG,Xiujuan ZHENG,Haiyan TU*() ),Chunli WANG,Xiujuan ZHENG,Haiyan TU*() |
| College of Electrical Engineering, Sichuan University, Chengdu 610065, China |
|
|
|
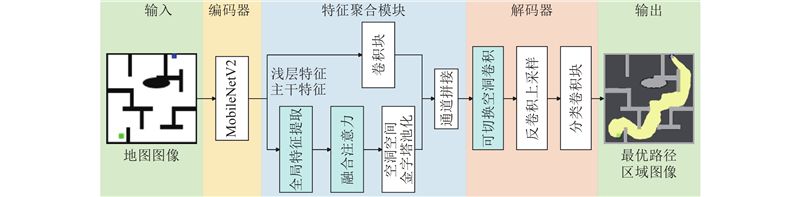
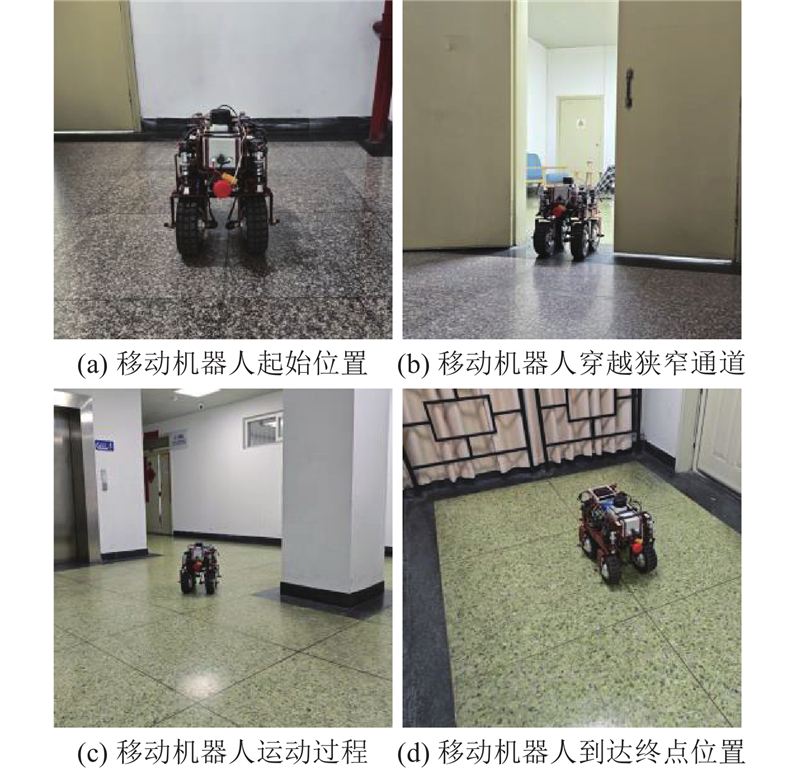
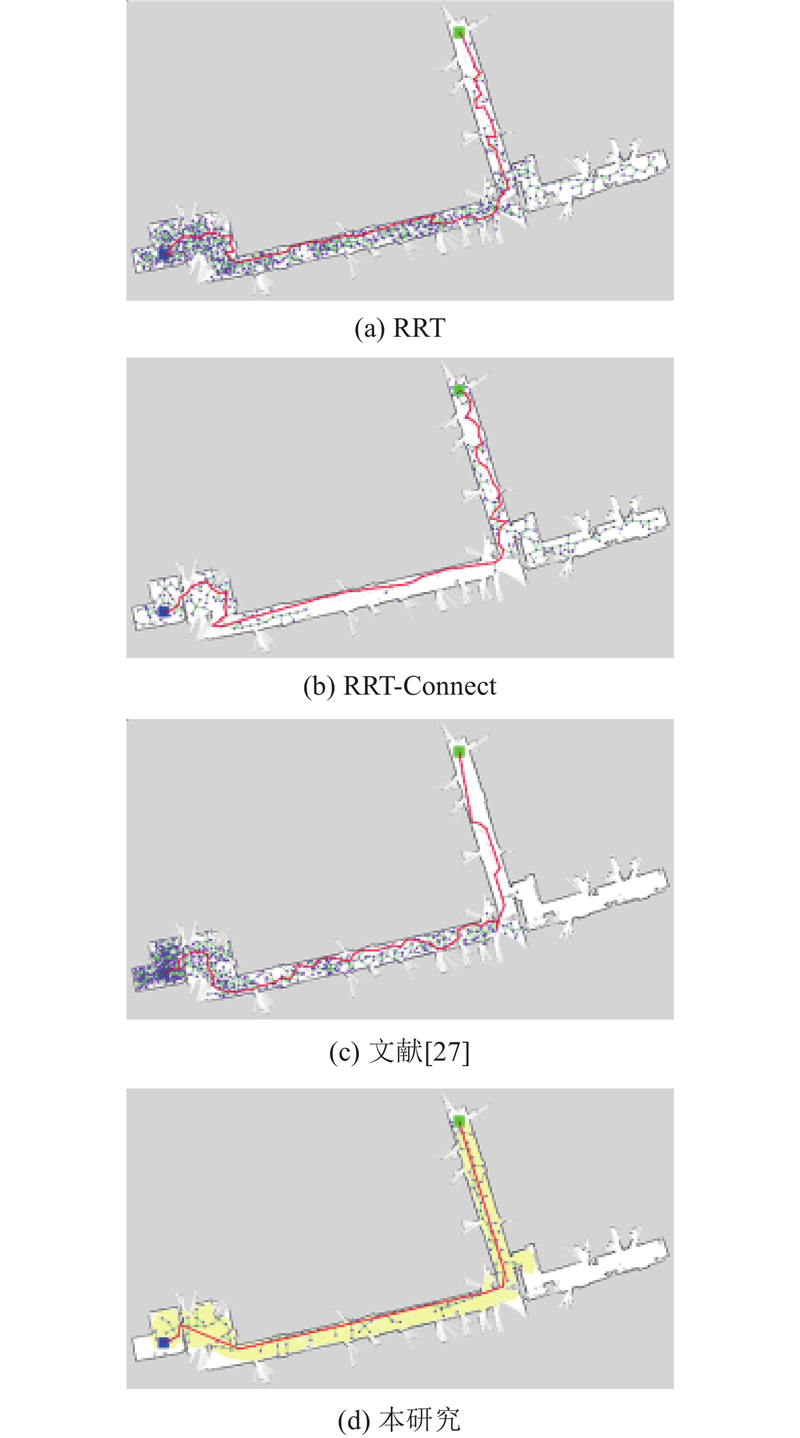
Abstract A new path planning algorithm was proposed to address the limitations of the conventional rapidly-exploring random trees (RRT) path planning algorithm, including excessive redundant sampling points, increased randomness, and lack of smooth paths. A model named the optimal path area prediction network (OPAPN) was developed to predict potential optimal path areas within the map using deep learning techniques. A global feature extraction module, a hybrid attention mechanism, and switchable atrous convolution techniques were incorporated in the model. The network’s understanding of the map’s overall layout and start/goal information was enhanced by the components to reduce unnecessary computational burdens. The number of sampling points was reduced significantly through heuristic sampling in the optimal path regions predicted by OPAPN, and the algorithm’s convergence speed was accelerated via a dual-tree expansion strategy. Both simulation experiments and real-world tests showed that the proposed algorithm performed well in convergence time, node count, and path length, confirming its practical application value.
|
|
Received: 09 October 2024
Published: 27 October 2025
|
|
|
| Fund: 四川省科技计划资助项目(2022YFS0032). |
|
Corresponding Authors:
Haiyan TU
E-mail: panjiawei@stu.scu.edu.cn;haiyantu@scu.edu.cn
|
基于语义分割的启发式采样路径规划算法
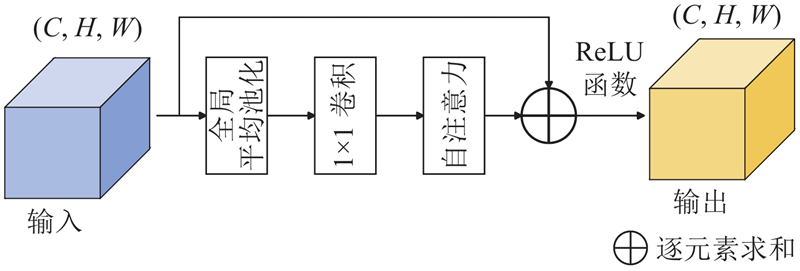
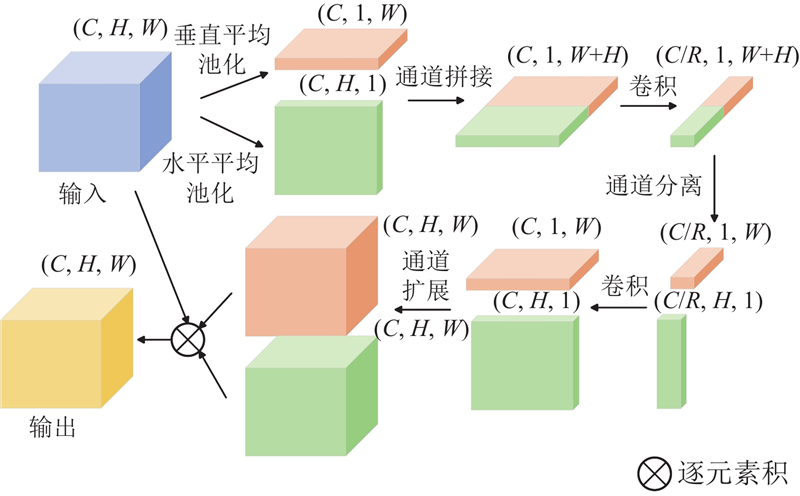
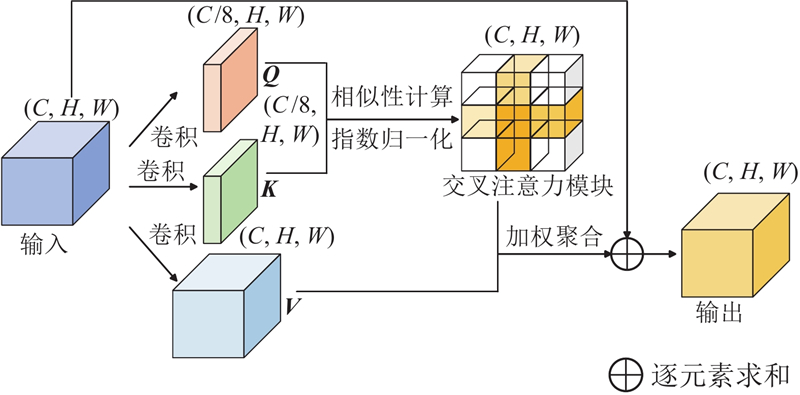
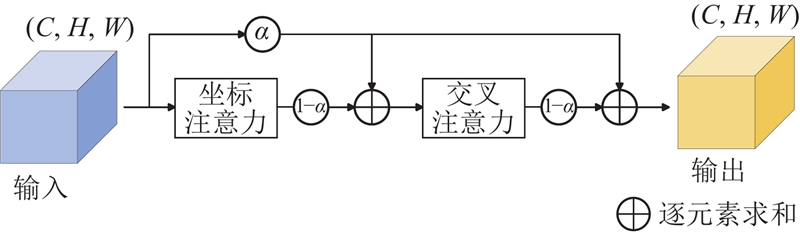
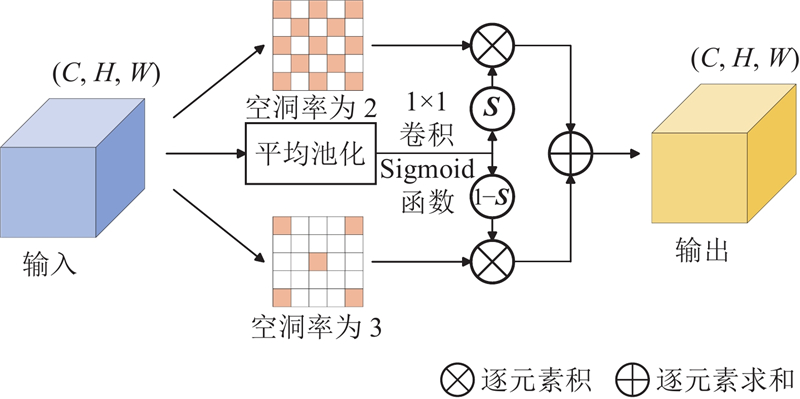
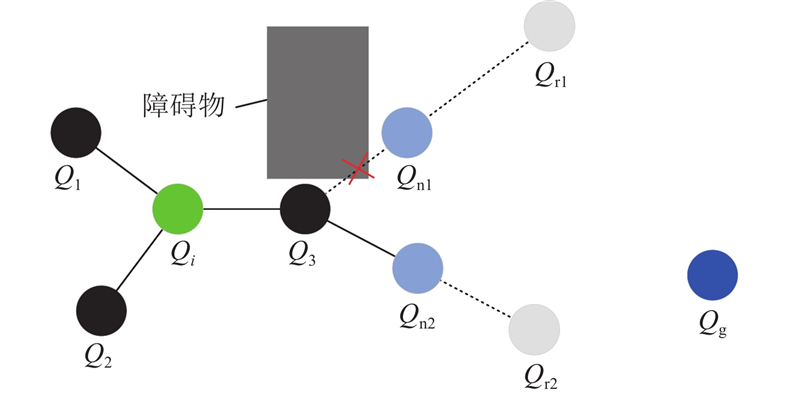
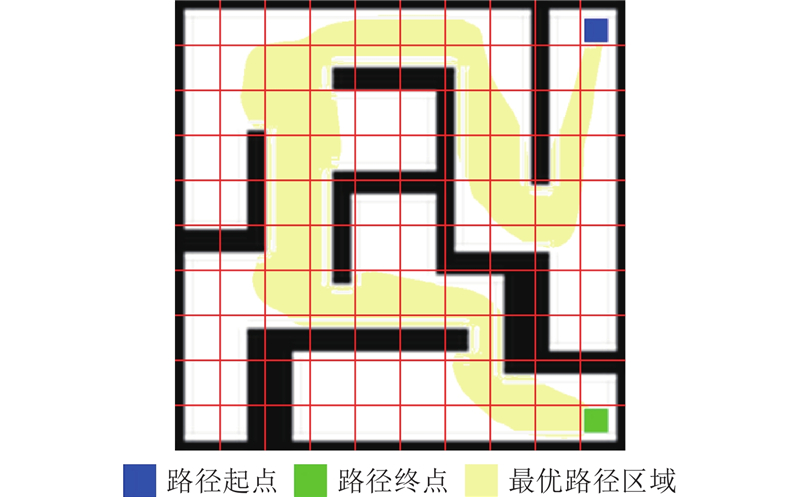
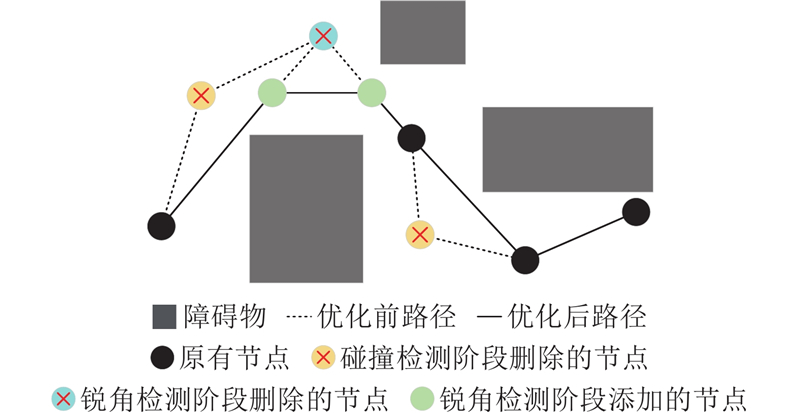
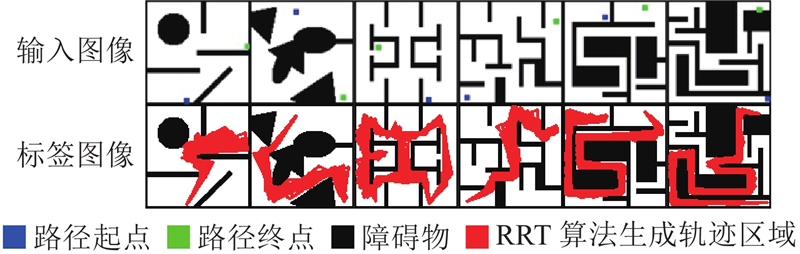
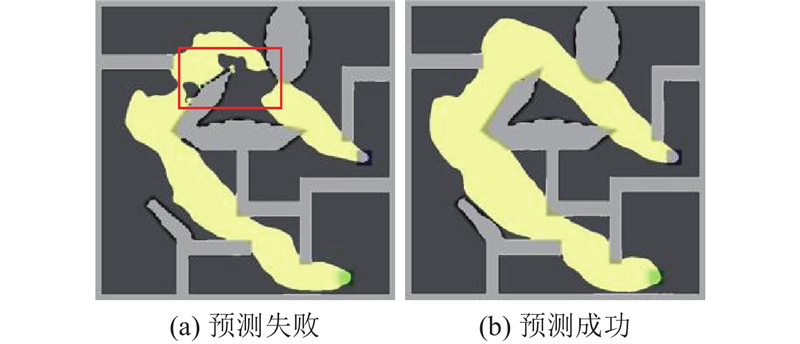
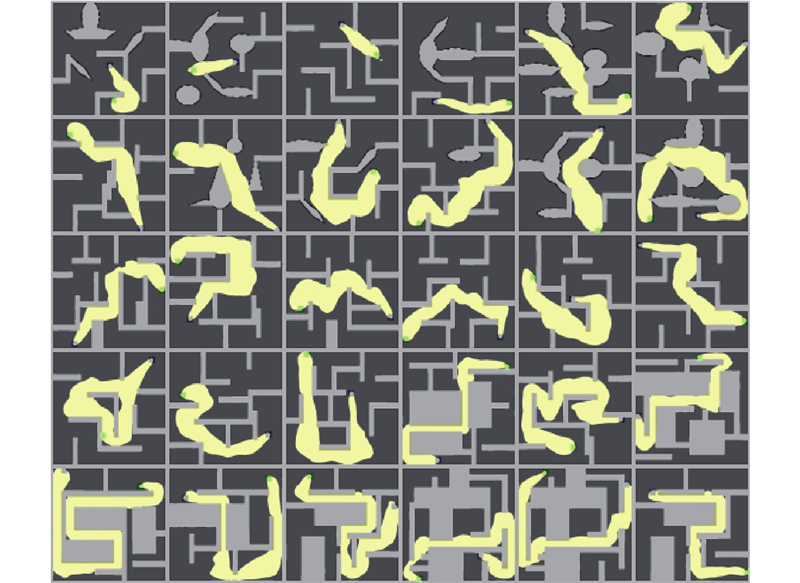
经典快速探索随机树(RRT)路径规划算法存在冗余采样点多、随机性强、路径不平滑等不足,为此提出新的路径规划算法. 设计最优路径区域预测网络模型(OPAPN),利用深度学习方法预测地图中的潜在最优路径区域. 整合全局特征提取模块、融合注意力机制以及可切换空洞卷积技术,提升网络对整体地图布局和起点/终点信息的理解,有效降低计算开销. 通过在OPAPN预测出的最优路径区域实施启发式采样来大幅减少采样点数量,采用双树扩展策略来加速算法的收敛速度. 仿真实验及真实环境测试表明,所提算法在收敛时间、节点数量和路径长度方面的性能表现良好,具有实际应用价值.
关键词:
移动机器人,
路径规划,
快速探索随机树(RRT),
深度学习,
语义分割,
注意力机制
|
|
| [1] |
DONG L, HE Z, SONG C, et al A review of mobile robot motion planning methods: from classical motion planning workflows to reinforcement learning-based architectures[J]. Journal of Systems Engineering and Electronics, 2023, 34 (2): 439- 459
doi: 10.23919/JSEE.2023.000051
|
|
|
| [2] |
赵学健, 叶昊, 贾伟, 等 AGV路径规划及避障算法研究综述[J]. 小型微型计算机系统, 2024, 45 (3): 529- 541
ZHAO Xuejian, YE Hao, JIA Wei, et al Survey on AGV path planning and obstacle avoidance algorithms[J]. Journal of Chinese Computer Systems, 2024, 45 (3): 529- 541
|
|
|
| [3] |
SUNDARRAJ S, REDDY R V K, BASAM M B, et al Route planning for an autonomous robotic vehicle employing a weight-controlled particle swarm-optimized dijkstra algorithm[J]. IEEE Access, 2023, 11: 92433- 92442
doi: 10.1109/ACCESS.2023.3302698
|
|
|
| [4] |
LIN Z, WU K, SHEN R, et al An efficient and accurate A-star algorithm for autonomous vehicle path planning[J]. IEEE Transactions on Vehicular Technology, 2024, 73 (6): 9003- 9008
doi: 10.1109/TVT.2023.3348140
|
|
|
| [5] |
SHAO S, ZHANG J, WANG T, et al Dynamic obstacle-avoidance algorithm for multi-robot flocking based on improved artificial potential field[J]. IEEE Transactions on Consumer Electronics, 2024, 70 (1): 4388- 4399
|
|
|
| [6] |
WANG L, WANG Z, YING Z, et al A path planning framework based on an improved weighted heuristic RRT and optimization strategy[J]. IEEE Transactions on Intelligent Vehicles, 2023, 9 (1): 1941- 1952
|
|
|
| [7] |
刘文倩, 单梁, 张伟龙, 等 复杂环境下基于改进Informed RRT的无人机路径规划算法[J]. 上海交通大学学报, 2024, 58 (4): 511- 524
LIU Wenqian, SHAN Liang, ZHANG Weilong, et al Unmanned aerial vehicle path planning algorithm based on improved informed RRT in complex environment[J]. Journal of Shanghai Jiao Tong University, 2024, 58 (4): 511- 524
|
|
|
| [8] |
MENG F, CHEN L, MA H, et al NR-RRT: neural risk-aware near-optimal path planning in uncertain nonconvex environments[J]. IEEE Transactions on Automation Science and Engineering, 2024, 21 (1): 135- 146
doi: 10.1109/TASE.2022.3215562
|
|
|
| [9] |
ZHANG W, SHAN L, CHANG L, et al SVF-RRT*: a stream-based VF-RRT* for USVs path planning considering ocean currents[J]. IEEE Robotics and Automation Letters, 2023, 8 (4): 2413- 2420
|
|
|
| [10] |
巩浩, 谭向全, 李佳欣, 等 基于改进RRT算法的移动机器人路径规划研究[J]. 组合机床与自动化加工技术, 2024, (1): 19- 24
GONG Hao, TAN Xiangquan, LI Jiaxin, et al Research on path planning of mobile robot based on improved RRT algorithm[J]. Modular Machine Tool and Automatic Manufacturing Technique, 2024, (1): 19- 24
|
|
|
| [11] |
KARAMAN S, FRAZZOLI E Sampling-based algorithms for optimal motion planning[J]. International Journal of Robotics Research, 2011, 30 (7): 846- 894
doi: 10.1177/0278364911406761
|
|
|
| [12] |
龚立雄, 陈佳霖, 黄霄, 等 基于改进Informed-RRT*算法的舰载机甲板平面路径规划[J]. 科学技术与工程, 2024, 24 (17): 7429- 7437
GONG Lixiong, CHEN Jialin, HUANG Xiao, et al Aircraft deck flat path planning based on improved informed-RRT* algorithm[J]. Science Technology and Engineering, 2024, 24 (17): 7429- 7437
|
|
|
| [13] |
SUN Z, LEI B, XIE P, et al Multi-risk-RRT: an efficient motion planning algorithm for robotic autonomous luggage trolley collection at airports[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9 (2): 3450- 3463
doi: 10.1109/TIV.2023.3349171
|
|
|
| [14] |
李昭莹, 欧一鸣, 石若凌 基于深度Q网络的改进RRT路径规划算法[J]. 空天防御, 2021, 4 (3): 17- 23
LI Zhaoying, OU Yiming, SHI Ruoling Improved RRT path planning algorithm based on deep Q-network[J]. Air and Space Defense, 2021, 4 (3): 17- 23
|
|
|
| [15] |
ZHAO C, ZHU Y, DU Y, et al A novel direct trajectory planning approach based on generative adversarial networks and rapidly-exploring random tree[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 17910- 17921
doi: 10.1109/TITS.2022.3164391
|
|
|
| [16] |
ZHANG T, WANG J, MENG M Q H Generative adversarial network based heuristics for sampling-based path planning[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9 (1): 64- 74
doi: 10.1109/JAS.2021.1004275
|
|
|
| [17] |
QIAO S, CHEN L C, YUILLE A. DetectoRS: detecting objects with recursive feature pyramid and switchable atrous convolution [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021: 10208–10219.
|
|
|
| [18] |
SANDLER M, HOWARD A, ZHU M, et al. MobileNetV2: inverted residuals and linear bottlenecks [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 4510–4520.
|
|
|
| [19] |
CHEN L C, PAPANDREOU G, SCHROFF F, et al. Rethinking atrous convolution for semantic image segmentation [EB/OL]. (2017−12−05)[2024−11−11]. https://arxiv.org/pdf/1706.05587.
|
|
|
| [20] |
VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need [C]// 31st Conference on Neural Information Processing Systems. Long Beach: [s.n.], 2017: 1–11.
|
|
|
| [21] |
HOU Q, ZHOU D, FENG J. Coordinate attention for efficient mobile network design [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021: 13708–13717.
|
|
|
| [22] |
HUANG Z, WANG X, WEI Y, et al CCNet: criss-cross attention for semantic segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45 (6): 6896- 6908
doi: 10.1109/TPAMI.2020.3007032
|
|
|
| [23] |
LI M, PENG P, SUN H, et al An order-invariant and interpretable dilated convolution neural network for chemical process fault detection and diagnosis[J]. IEEE Transactions on Automation Science and Engineering, 2023, 21 (3): 3933- 3943
|
|
|
| [24] |
TU H, DENG Y, LI Q, et al Improved RRT global path planning algorithm based on Bridge Test[J]. Robotics and Autonomous Systems, 2024, 171: 104570
doi: 10.1016/j.robot.2023.104570
|
|
|
| [25] |
HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 770–778.
|
|
|
| [26] |
RADOSAVOVIC I, KOSARAJU R P, GIRSHICK R, et al. Designing network design spaces [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 10425–10433.
|
|
|
| [27] |
李金良, 舒翰儒, 刘德建, 等 基于改进RRT路径规划算法[J]. 组合机床与自动化加工技术, 2021, (2): 22- 24
LI Jinliang, SHU Hanru, LIU Dejian, et al Path planning algorithm based on improved RRT[J]. Modular Machine Tool and Automatic Manufacturing Technique, 2021, (2): 22- 24
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|