|
|
|
| Improved Aquila algorithm to optimize fuzzy PID control of vehicle ABS |
Chuang TIAN1,2( ),He HUANG1,2,*(),Lan YANG3,Tao GAO4,Huifeng WANG1 ),He HUANG1,2,*(),Lan YANG3,Tao GAO4,Huifeng WANG1 |
1. School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China
2. Key Laboratory of Intelligent Expressway Information Fusion and Control, Chang’an University, Xi’an 710064, China
3. School of Information Engineering, Chang’an University, Xi’an 710064, China
4. School of Data Science and Artificial Intelligence, Chang’an University, Xi’an 710064, China |
|
|
|
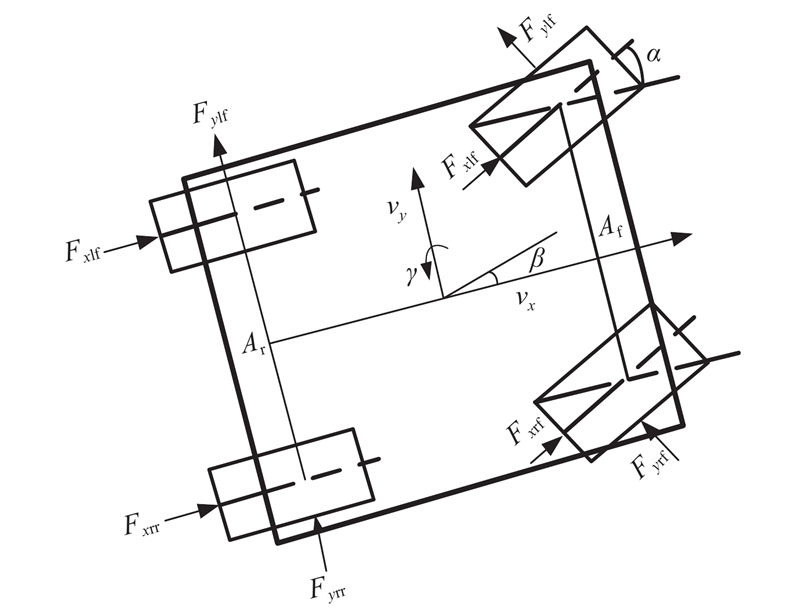
Abstract Aiming at the shortcomings of the existing anti-lock braking system (ABS), such as insufficient dynamic performance and excessive dependence on expert experience, a fuzzy PID control method of vehicle ABS optimized by a multi-strategy Aquila algorithm was proposed. A dynamic performance simulation platform of automobile ABS was built, including the vehicle model, brake model and controller model. An improved Aquila optimization algorithm (DEFFAO) based on multi-strategy was proposed to address the issues of the Aquila algorithm easily falling into local optima and having limited search precision. A free hunting strategy for the Aquila was designed to enhance the individual search ability and avoid the algorithm falling into the local optimal value. A nonlinear convergence factor was designed to balance the global and local search capabilities. Combined with the differential evolution strategy, the poor individuals in the Aquila population were eliminated. By mixing a variety of strategies, the DEFFAO method design was completed. A DEFFAO-fuzzy PID controller was obtained by off-line optimization tuning of the scale factor parameters. Different road conditions were selected to simulate the anti-lock braking process of the vehicle. Results show that compared with the existing algorithm, the slip ratio curve output by the ABS based on DEFFAO-fuzzy PID control is better maintained within the expected range, the vehicle braking time is faster, and the braking distance is shorter.
|
|
Received: 17 June 2024
Published: 25 July 2025
|
|
|
| Fund: 国家自然基金资助项目(52172324);中央高校基本科研业务费专项资金重点科研平台建设计划水平提升项目(300102325501);陕西省留学人员科技活动择优资助项目(2023001). |
|
Corresponding Authors:
He HUANG
E-mail: 2392688438@qq.com;huanghe@chd.edu.cn
|
改进天鹰算法优化整车ABS的模糊PID控制
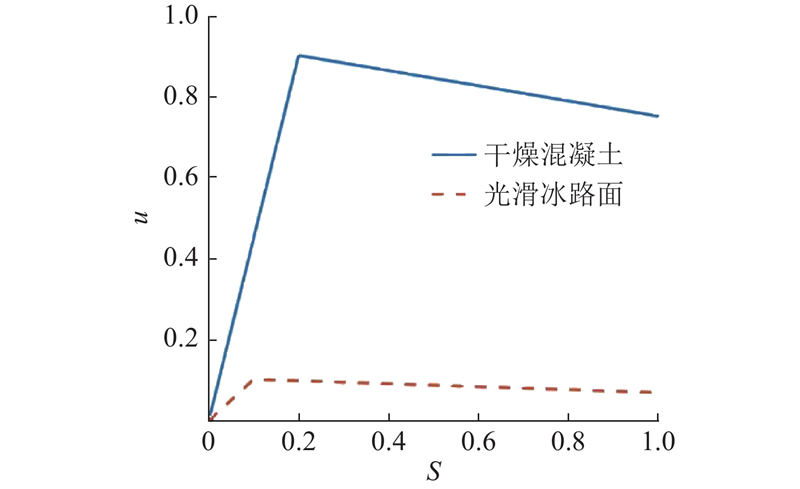
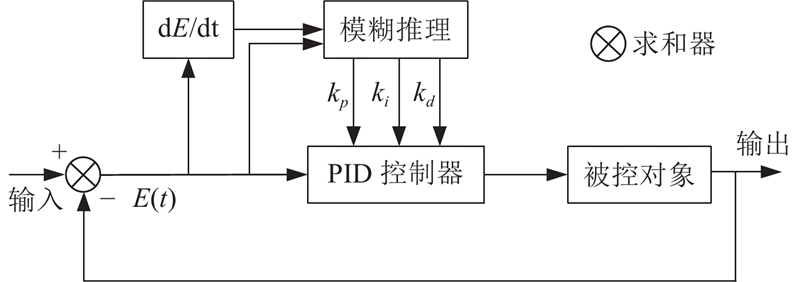
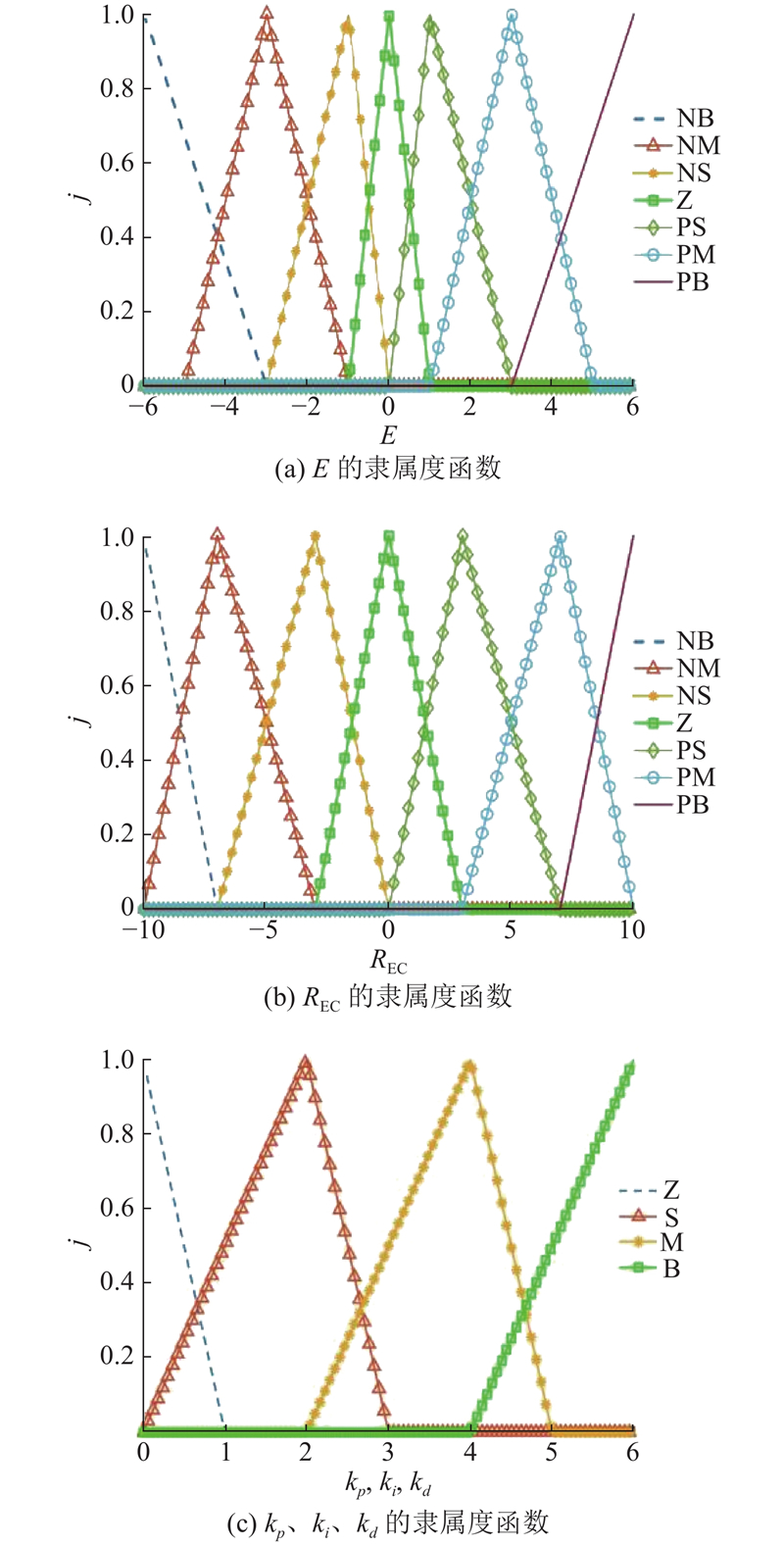
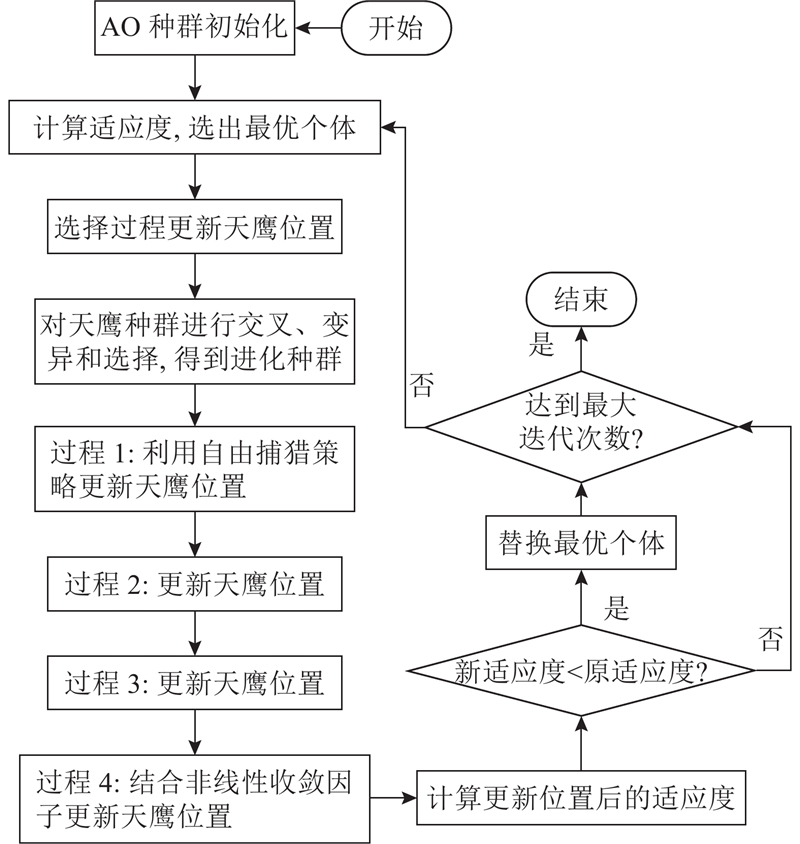
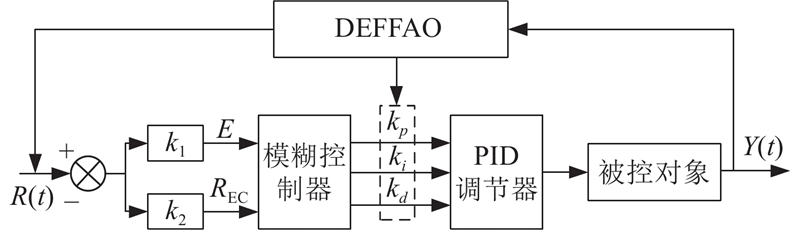
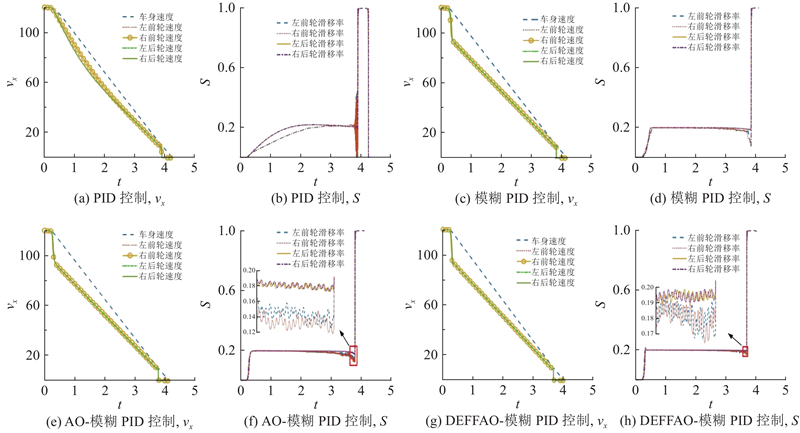
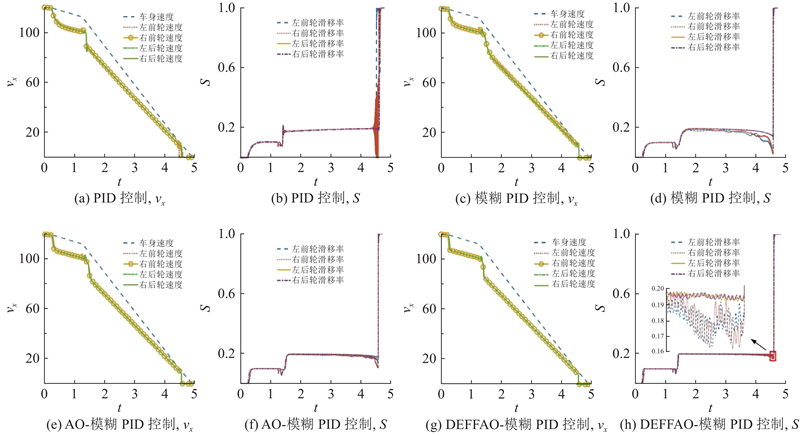
针对现有防抱死制动系统(ABS)控制器部分动态性能不足且过分依赖专家经验的弊端,提出多策略天鹰算法优化的整车ABS模糊PID控制方法. 搭建汽车ABS动态性能仿真平台,包括整车模型、制动器模型及控制器模型. 为了解决天鹰算法易陷入局部最优及搜索精度有限的问题,提出基于多策略改进的天鹰优化算法(DEFFAO). 设计天鹰自由捕猎策略,增强个体搜索能力,避免算法陷入局部最优值;设计非线性收敛因子,平衡全局和局部的搜索能力;结合差分进化策略,淘汰天鹰种群中的较差个体. 通过混合多种策略,完成DEFFAO方法设计. 采用离线优化整定比例因子参数得到DEFFAO-模糊PID控制器,选择不同路面条件对汽车防抱死制动过程进行仿真实验. 结果表明,相比现有算法,基于DEFFAO-模糊PID控制ABS输出的滑移率曲线能够更好地保持在期望范围内,车辆制动时间更快,制动距离更短.
关键词:
防抱死系统(ABS),
模糊PID控制器,
天鹰算法,
滑移率,
制动时间,
制动距离
|
|
| [1] |
YANG F, CHEN X, GUO D, et al Electric-hydraulic compound control anti-lock braking system[J]. International Journal of Automotive Technology, 2022, 23 (6): 1593- 1608
doi: 10.1007/s12239-022-0139-2
|
|
|
| [2] |
郑鑫巍, 张丽萍 汽车ABS控制仿真分析[J]. 汽车实用技术, 2022, 47 (7): 111- 115
ZHENG Xinwei, ZHANG Liping Simulation analysis of automobile ABS control[J]. Automobile Applied Technology, 2022, 47 (7): 111- 115
|
|
|
| [3] |
姚芳, 林祥辉, 吴正斌, 等 汽车防抱死制动系统的自抗扰控制研究[J]. 中国公路学报, 2021, 34 (3): 235- 244
YAO Fang, LIN Xianghui, WU Zhengbin, et al Active disturbance rejection control for automotive anti-lock braking system[J]. China Journal of Highway and Transport, 2021, 34 (3): 235- 244
doi: 10.3969/j.issn.1001-7372.2021.03.018
|
|
|
| [4] |
苑磊, 何仁 基于线性自抗扰控制的汽车ABS滑移率控制研究[J]. 汽车工程, 2021, 43 (9): 1367- 1374
YUAN Lei, HE Ren Research on ABS slip ratio control of vehicle based on linear active disturbance rejection control[J]. Automotive Engineering, 2021, 43 (9): 1367- 1374
|
|
|
| [5] |
SHAHABI A, KAZEMIAN A H, FARAHAT S, et al Wheel slip ratio regulation for investigating the vehicle’s dynamic behavior during braking and steering input[J]. Mechanics and Industry, 2021, 22: 17
|
|
|
| [6] |
王骏骋, 吕林峰, 李剑敏, 等 分布驱动电动汽车电液复合制动最优滑模ABS控制[J]. 吉林大学学报: 工学版, 2022, 52 (8): 1751- 1758
WANG Juncheng, LYU Linfeng, LI Jianmin, et al Optimal sliding mode ABS control for electro-hydraulic composite braking of distributed driven electric vehicle[J]. Journal of Jilin University: Engineering and Technology Edition, 2022, 52 (8): 1751- 1758
|
|
|
| [7] |
ZHANG R, ZHAO B Simulation research on PID control of automotive stability based on genetic algorithm optimization[J]. Open Access Library Journal, 2018, 5 (5): e4625
|
|
|
| [8] |
马忠武, 倪兰青, 陈宇珂, 等 基于神经模糊PID的ABS控制策略研究[J]. 重庆理工大学学报: 自然科学, 2018, 32 (9): 14- 22
MA Zhongwu, NI Lanqing, CHEN Yuke, et al Research on ABS control strategy based on neuro-fuzzy PID[J]. Journal of Chongqing University of Technology: Natural Science, 2018, 32 (9): 14- 22
|
|
|
| [9] |
李志清, 李美, 付丽荣, 等 遗传算法优化的空气悬架模糊PID控制[J]. 机械设计与制造, 2023, (4): 22- 25
LI Zhiqing, LI Mei, FU Lirong, et al Fuzzy-PID control of air suspension based on genetic algorithm optimization[J]. Machinery Design and Manufacture, 2023, (4): 22- 25
|
|
|
| [10] |
陈鑫, 胡明茂, 廖子文 基于粒子群优化算法的PID控制液压防抱死系统[J]. 湖北汽车工业学院学报, 2021, 35 (4): 10- 16
CHEN Xin, HU Mingmao, LIAO Ziwen PID control anti-lock braking system based on particle swarm optimization algorithm[J]. Journal of Hubei University of Automotive Technology, 2021, 35 (4): 10- 16
|
|
|
| [11] |
ABUALIGAH L, YOUSRI D, ABD ELAZIZ M, et al Aquila Optimizer: a novel meta-heuristic optimization algorithm[J]. Computers and Industrial Engineering, 2021, 157: 107250
|
|
|
| [12] |
LI S, WANG G, WANG H, et al Automatic emergency braking/anti-lock braking system coordinated control with road adhesion coefficient estimation for heavy vehicle[J]. IET Intelligent Transport Systems, 2022, 16 (11): 1521- 1534
doi: 10.1049/itr2.12229
|
|
|
| [13] |
FENG X, HU J. Discrete fuzzy adaptive PID control algorithm for automotive anti-lock braking system [J]. Journal of Ambient Intelligence and Humanized Computing, 2021: 1–10.
|
|
|
| [14] |
马建, 李学博, 赵轩, 等 电动汽车复合制动控制研究现状综述[J]. 中国公路学报, 2022, 35 (11): 271- 294
MA Jian, LI Xuebo, ZHAO Xuan, et al Review of electro-mechanical composite braking control for electric vehicles[J]. China Journal of Highway and Transport, 2022, 35 (11): 271- 294
doi: 10.3969/j.issn.1001-7372.2022.11.024
|
|
|
| [15] |
WU X J, XU L, ZHEN R, et al Global and local moth-flame optimization algorithm for UAV formation path planning under multi-constraints[J]. International Journal of Control, Automation and Systems, 2023, 21 (3): 1032- 1047
doi: 10.1007/s12555-020-0979-3
|
|
|
| [16] |
THOTA S, MENAKA D Botnet detection in the Internet-of-Things networks using convolutional neural network with pelican optimization algorithm[J]. Automatika, 2024, 65 (1): 250- 260
doi: 10.1080/00051144.2023.2288486
|
|
|
| [17] |
XUE J, SHEN B Dung beetle optimizer: a new meta-heuristic algorithm for global optimization[J]. The Journal of Supercomputing, 2023, 79 (7): 7305- 7336
doi: 10.1007/s11227-022-04959-6
|
|
|
| [18] |
OGUNDEPO E A, FOKOUÉ E An empirical demonstration of the no free lunch theorem[J]. Mathematics for Application, 2020, 8 (2): 173- 188
doi: 10.13164/ma.2019.11
|
|
|
| [19] |
潘公宇, 徐豪晖, 刘志强, 等 汽车电子机械制动系统的ABS自抗扰控制[J]. 重庆理工大学学报: 自然科学, 2024, 38 (6): 55- 62
PAN Gongyu, XU Haohui, LIU Zhiqiang, et al ABS active disturbance rejection control for automotive electromechanical braking systems[J]. Journal of Chongqing University of Technology: Natural Science, 2024, 38 (6): 55- 62
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|