|
|
|
| Coordinated control of active front wheel steering and anti-lock braking system |
Xiaolong LI1,2( ),He HUANG1,2,Chuang TIAN1,2,Wei LI1,*(),Lan YANG3,Huifeng WANG1,Tao GAO3 ),He HUANG1,2,Chuang TIAN1,2,Wei LI1,*(),Lan YANG3,Huifeng WANG1,Tao GAO3 |
1. School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China
2. Key Laboratory of Intelligent Expressway Information Fusion and Control, Xi’an 710064, China
3. School of Information Engineering, Chang’an University, Xi’an 710064, China |
|
|
|
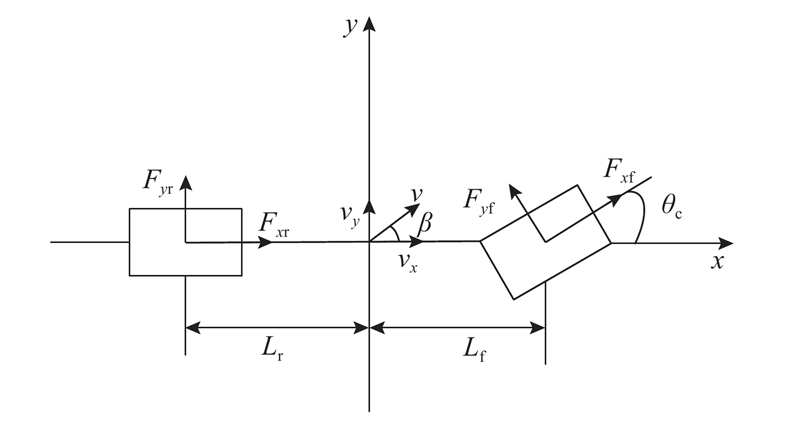
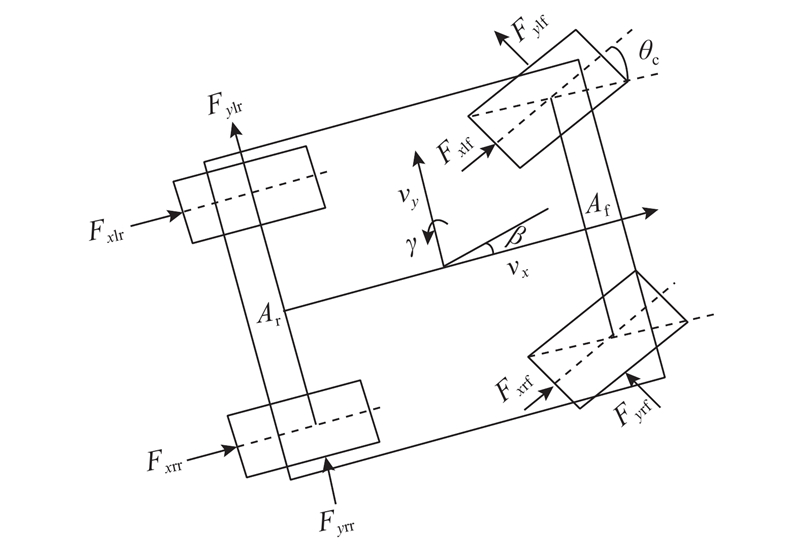
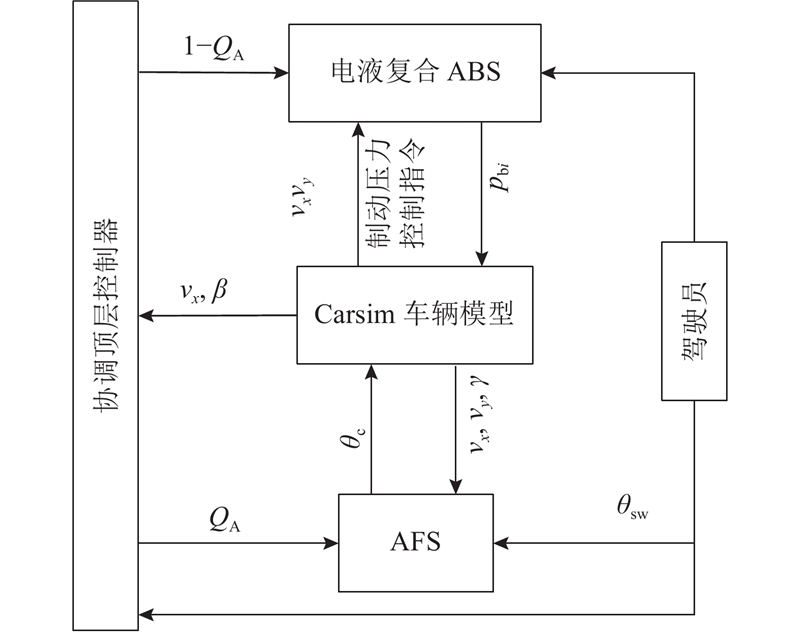
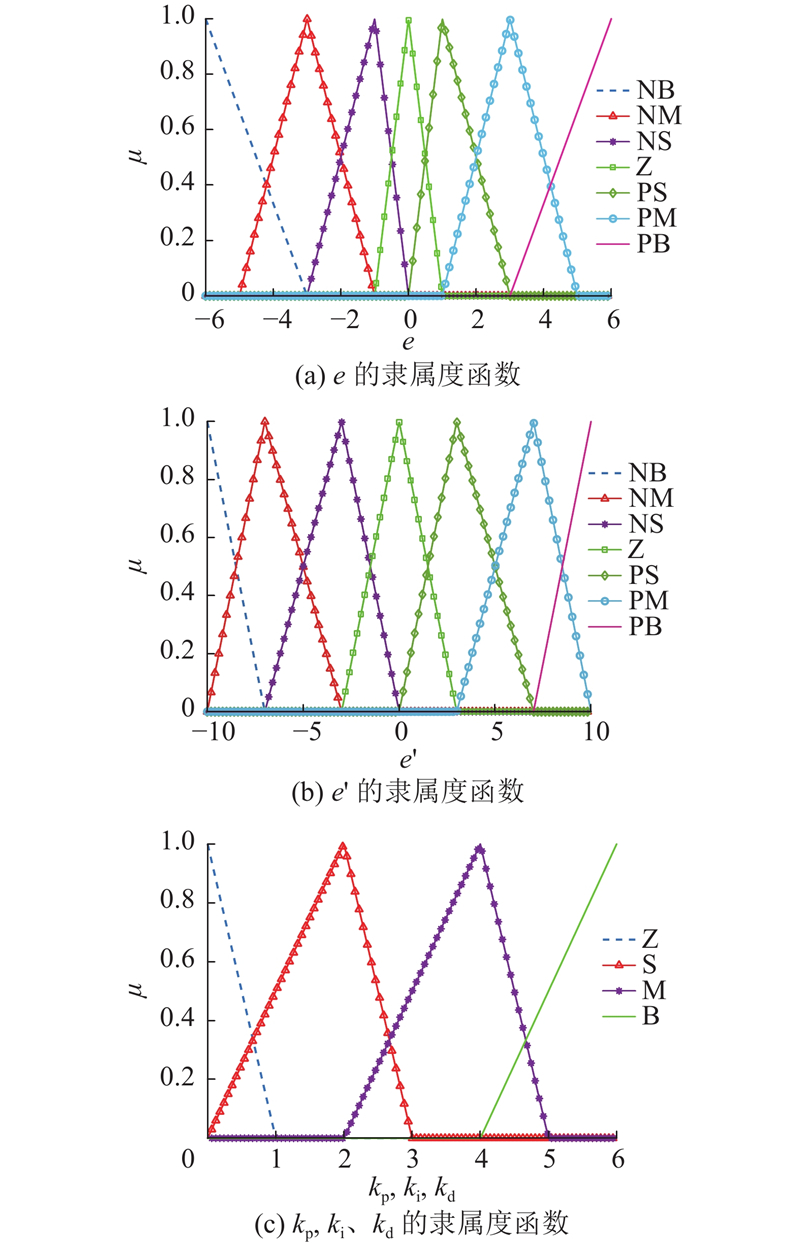
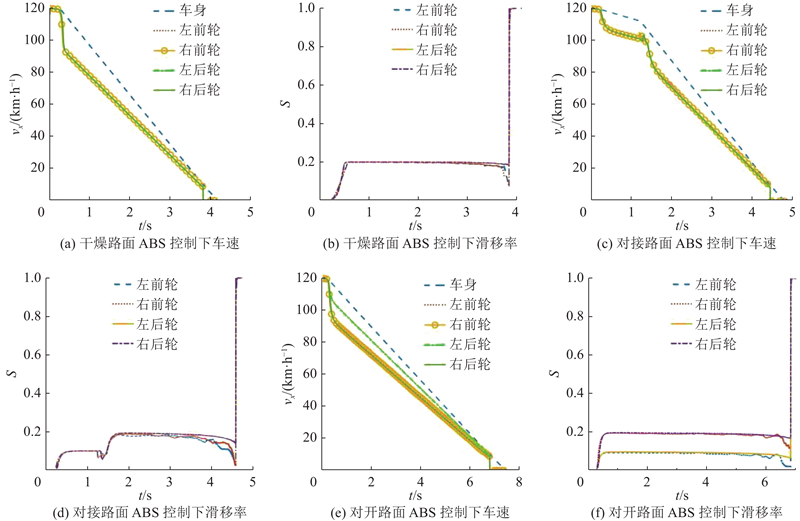
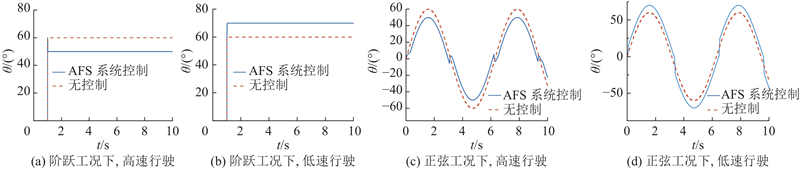
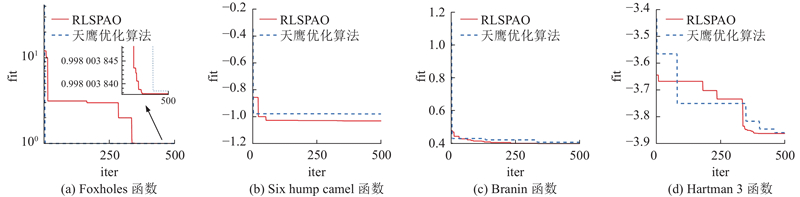
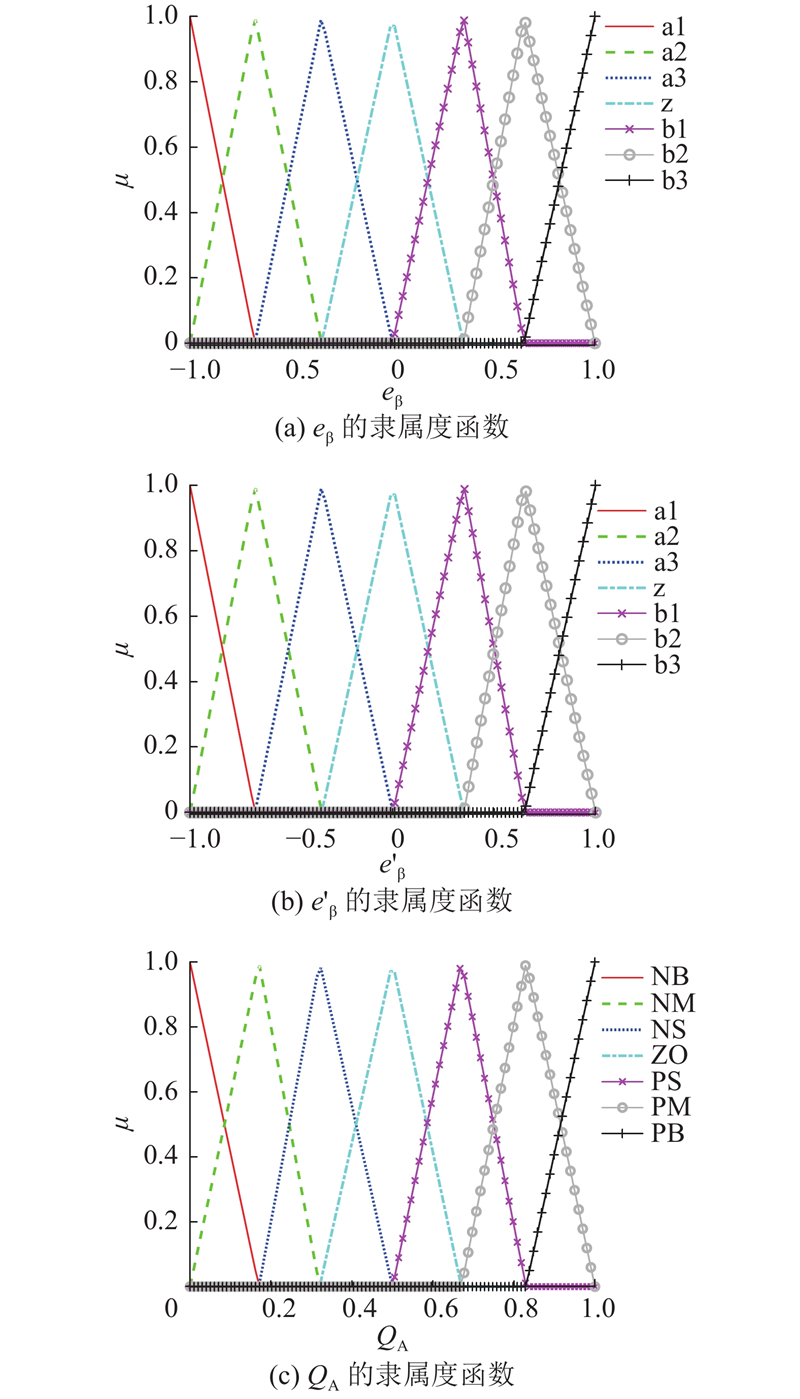
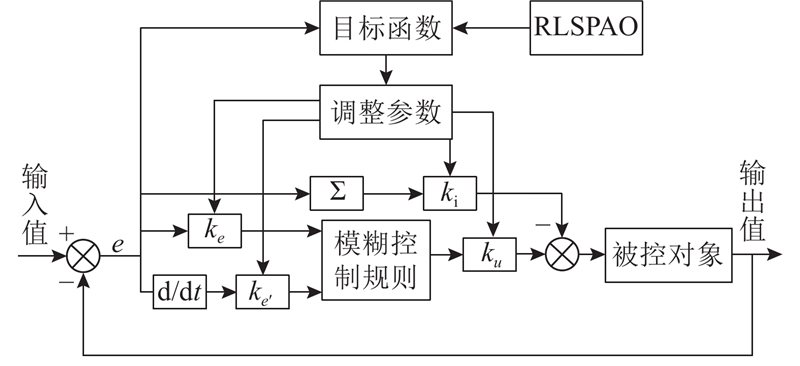
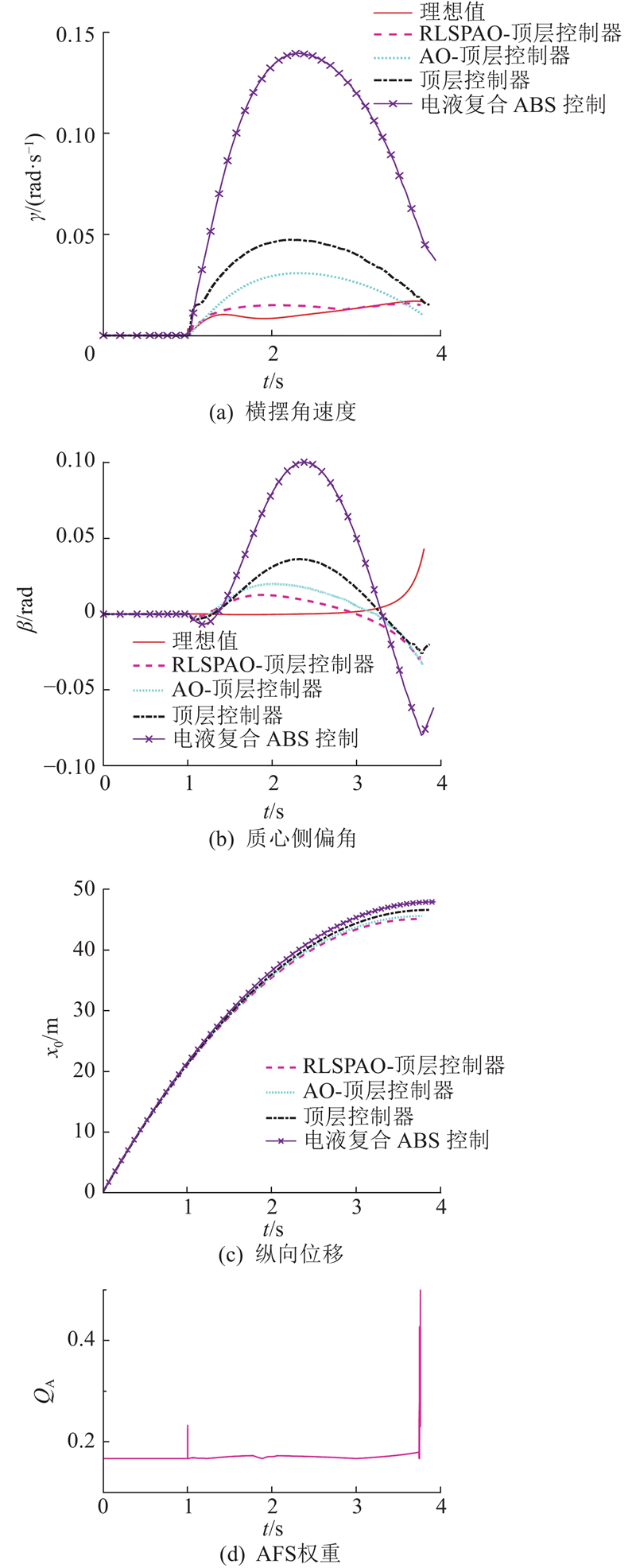
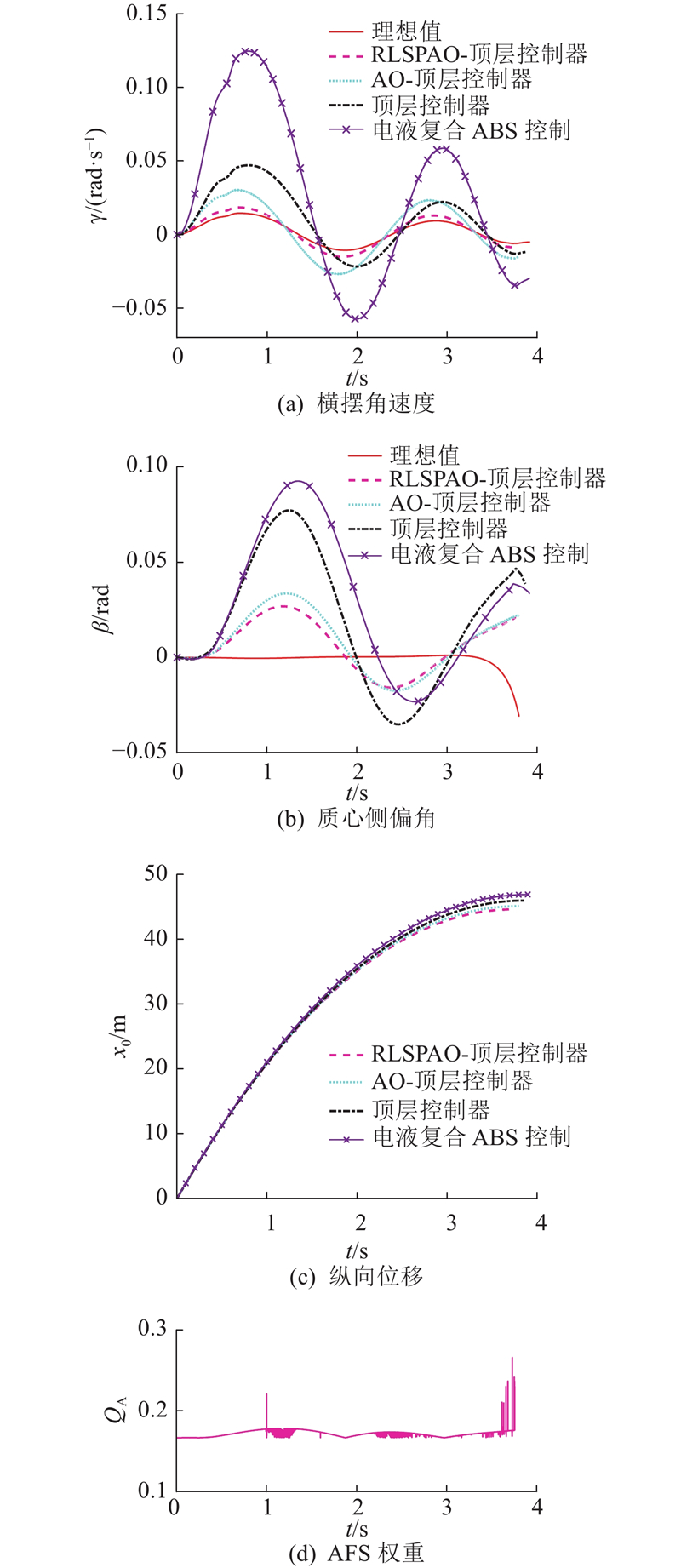
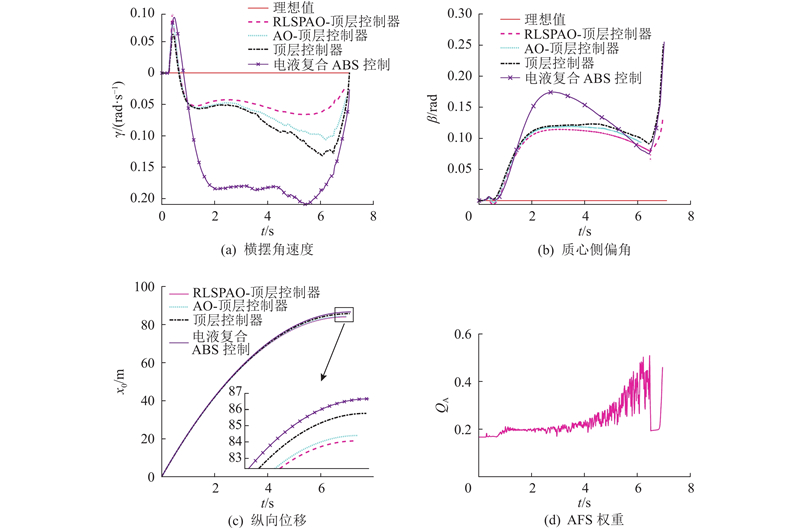
Abstract Aiming at the problem that the current vehicle anti-lock braking system (ABS) mainly acts on the longitudinal control of the vehicle, which causes the lateral offset of the vehicle body during the braking process under complex working conditions, a fuzzy top-level controller optimized by the improved Aquila optimization algorithm was proposed to realize the coordinated control between ABS and active front wheel steering system (AFS). Firstly, the two-degree-of-freedom and seven-degree-of-freedom vehicle dynamics models were established to analyze the vehicle motion characteristics. Secondly, an improved Aquila optimization algorithm was proposed. The dynamic reverse learning strategy and the disturbance mechanism based on stagnation detection were designed to enhance the global optimization ability. Based on this, the quantization factor and scale factor of the fuzzy controller were optimized. At the same time, a top-level controller based on fuzzy control was proposed to reasonably allocate the control rights of the lower ABS and AFS to ensure the control coordination of ABS and AFS. Finally, the improved Aquila optimization algorithm was used to optimize the fuzzy top-level controller, enabling the control system to automatically adjust the quantization factor and scale factor according to different angles of the vehicle and different road conditions, thereby enhancing the controller’s adaptive learning ability. The simulation results show that compared with the traditional ABS control, basic fuzzy control and Aquila optimization algorithm for optimizing control, the proposed method reduces the peak value of yaw rate by 88.61% and the peak value of sideslip angle by 69.69%, which significantly improves the lateral stability and braking efficiency of the vehicle.
|
|
Received: 20 June 2025
Published: 06 May 2026
|
|
|
| Fund: 国家自然科学基金资助项目(52472446);中央高校基本科研业务费资助项目(300102326501);陕西省留学人员科技活动择优资助项目(2023001). |
|
Corresponding Authors:
Wei LI
E-mail: lixiaolong0424@126.com;1160755608@qq.com
|
主动前轮转向与防抱死制动系统的协调控制
当前车辆防抱死制动系统(ABS)主要作用于汽车的纵向控制,车辆在复杂工况制动过程中会出现车身横向偏移的问题,为此提出基于改进天鹰优化算法优化的模糊顶层控制器,实现ABS与主动前轮转向系统(AFS)的协调控制. 建立二自由度及七自由度车辆动力学模型,分析车辆运动特性. 提出改进的天鹰优化算法,设计动态反向学习策略和基于停滞检测的扰动机制,增强全局寻优能力,优化模糊控制器的量化因子与比例因子. 提出基于模糊控制的顶层控制器,对下层ABS和AFS的控制权重进行合理分配,确保ABS和AFS的控制协调性. 利用改进天鹰优化算法对模糊顶层控制器进行优化,使得控制系统根据车辆不同转角及不同路况自动调节控制器的量化因子与比例因子,增强控制器的自适应学习能力. 仿真验证结果表明:相较于传统ABS控制、基础模糊控制及天鹰优化算法优化控制,所提方法使横摆角速度峰值最高降低88.61%,质心侧偏角峰值最高减少69.69%,显著提升了车辆的横向稳定性与制动效率.
关键词:
防抱死制动系统(ABS),
天鹰优化算法,
协调控制,
主动前轮转向,
参数整定,
质心侧偏角
|
|
| [1] |
张平平 基于目标滑移率的车辆防抱死制动系统控制算法研究[J]. 专用汽车, 2024, (4): 32- 36
ZHANG Pingping Research on control algorithm of vehicle anti-lock braking system based on target slip rate[J]. Special Purpose Vehicle, 2024, (4): 32- 36
doi: 10.19999/j.cnki.1004-0226.2024.04.010
|
|
|
| [2] |
HE Y, ZHOU Y, LIU X, et al An adaptive finite-time control method for antilock braking system with experimental analysis[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2024, 238 (9): 2583- 2596
doi: 10.1177/09544070231174656
|
|
|
| [3] |
YAN B, FANG C, QIU H, et al. Model of speed limit of expressway in snow based on variable road friction [C]// Proceedings of the Sixth International Conference on Traffic Engineering and Transportation System. Guangzhou: SPIE, 2023: 23.
|
|
|
| [4] |
HE X, YANG K, CHANG Y, et al Analysis and control for ideal variable transmission ratio characteristics of active front wheel steering[J]. International Journal of Modelling, Identification and Control, 2024, 45 (1): 40- 57
doi: 10.1504/ijmic.2024.10064195
|
|
|
| [5] |
MANKOUR M, MOHAMMED CHIKOUCHE T, KADA H, et al Advanced longitudinal and lateral stability control system for a four-wheel-independent-drive electric vehicle using a new power converter topology[J]. Journal of Electrical Engineering and Technology, 2023, 18 (3): 1821- 1839
doi: 10.1007/s42835-023-01384-4
|
|
|
| [6] |
倪铭, 李玉芳, 娄百川 基于AFS辅助控制的汽车四通道ABS协同控制[J]. 重庆理工大学学报: 自然科学版, 2020, 34 (8): 29- 36
NI Ming, LI Yufang, LOU Baichuan Automobile four-channel ABS cooperative control based on AFS assisted control[J]. Journal of Chongqing University of Technology: Natural Science, 2020, 34 (8): 29- 36
doi: 10.3969/j.issn.1674-8425(z).2020.08.005
|
|
|
| [7] |
ZHANG N, WANG J, LI Z, et al Multi-agent-based coordinated control of ABS and AFS for distributed drive electric vehicles[J]. Energies, 2022, 15 (5): 1919
doi: 10.3390/en15051919
|
|
|
| [8] |
吴玲, 孙宇, 孙永荣 基于Matlab/Simulink的汽车ABS系统的建模与仿真[J]. 自动化应用, 2014, 55 (5): 75- 77
WU Ling, SUN Yu, SUN Yongrong Modeling and simulation of ABS system of automobiles based on Matlab/Simulink[J]. Automation Application, 2014, 55 (5): 75- 77
|
|
|
| [9] |
田闯, 黄鹤, 杨澜, 等 改进天鹰算法优化整车ABS的模糊PID控制[J]. 浙江大学学报: 工学版, 2025, 59 (7): 1462- 1470
TIAN Chuang, HUANG He, YANG Lan Improved aquila optimizer to optimize fuzzy PID control of vehicle ABS[J]. Journal of Zhejiang University: Engineering Science, 2025, 59 (7): 1462- 1470
doi: 10.3785/j.issn.1008-973X.2025.07.014
|
|
|
| [10] |
马建, 李学博, 赵轩, 等 电动汽车复合制动控制研究现状综述[J]. 中国公路学报, 2022, 35 (11): 271- 294
MA Jian, LI Xuebo, ZHAO Xuan, et al Review of electro-mechanical composite braking control for electric vehicles[J]. China Journal of Highway and Transport, 2022, 35 (11): 271- 294
doi: 10.19721/j.cnki.1001-7372.2022.11.024
|
|
|
| [11] |
田闯, 黄鹤, 林国庆, 等 融合多策略天鹰算法优化汽车ABS的PID控制[J]. 哈尔滨工业大学学报, 2025, 57 (4): 52- 61
TIAN Chuang, HUANG He, LIN Guoqing Optimizing PID control of automobile ABS by integrating multi-strategy aquila optimizer[J]. Journal of Harbin Institute of Technology, 2025, 57 (4): 52- 61
doi: 10.11918/202405075
|
|
|
| [12] |
ZHAO F, ZHONG Y, FU Z Active and passive heave compensation system based on feedback linearization sliding mode variable structure control[J]. Ocean Engineering, 2024, 305: 117962
doi: 10.1016/j.oceaneng.2024.117962
|
|
|
| [13] |
于浩凡. 基于多智能体的分布式驱动电动汽车动力学全阶滑模控制 [D]. 哈尔滨: 哈尔滨理工大学, 2024.
YU Haofan. Full-order terminal sliding mode dynamic control for distributed drive electric vehicle based on multi-agent [D]. Harbin: Harbin University of Science and Technology, 2024.
|
|
|
| [14] |
刘赫. 基于多智能体的汽车线控四轮主动转向滑模控制策略研究 [D]. 长春: 长春工业大学, 2023.
LIU He. Research on sliding mode control strategy of four-wheel active steering by wire based on multi-agent [D]. Changchun: Changchun University of Technology, 2023.
|
|
|
| [15] |
ABUALIGAH L, YOUSRI D, ABD ELAZIZ M, et al Aquila Optimizer: a novel meta-heuristic optimization algorithm[J]. Computers and Industrial Engineering, 2021, 157: 107250
doi: 10.1016/j.cie.2021.107250
|
|
|
| [16] |
YU H, JIA H, ZHOU J, et al Enhanced Aquila optimizer algorithm for global optimization and constrained engineering problems[J]. Mathematical Biosciences and Engineering, 2022, 19 (12): 14173- 14211
doi: 10.3934/mbe.2022660
|
|
|
| [17] |
余米森, 钱玉宝, 黄华宝, 等 连续工况下基于PID+LQR算法的自动驾驶车辆横纵向耦合控制[J]. 科学技术与工程, 2022, 22 (30): 13490- 13496
YU Misen, QIAN Yubao, HUANG Huabao, et al Lateral and longitudinal coupling control of autonomous vehicle based on PID+LQR algorithm under continuous conditions[J]. Science Technology and Engineering, 2022, 22 (30): 13490- 13496
doi: 10.3969/j.issn.1671-1815.2022.30.043
|
|
|
| [18] |
赵树恩, 陈文斌, 邓召学, 等 基于扩张状态观测器的智能汽车弯道轨迹跟踪控制[J]. 汽车安全与节能学报, 2022, 13 (1): 112- 121
ZHAO Shuen, CHEN Wenbin, DENG Zhaoxue, et al Trajectory tracking control for intelligent vehicles driving in curved road based on expanded state observers[J]. Journal of Automotive Safety and Engergy, 2022, 13 (1): 112- 121
doi: 10.3969/j.issn.1674-8484.2022.01.011
|
|
|
| [19] |
罗鹏, 赵红, 张忠伍, 等 基于滑模负载扰动观测器的USV永磁同步推进电机模糊自适应控制[J]. 电工技术, 2024, (15): 33- 37
LUO Peng, ZHAO Hong, ZHANG Zhongwu, et al Fuzzy self-adaptive control of USV permanent magnet synchronous propulsion motor based on sliding mode load disturbance observer[J]. Electric Engineering, 2024, (15): 33- 37
doi: 10.19768/j.cnki.dgjs.2024.15.008
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|