|
|
|
| Mining truck sideslip angle estimation based on multiple methods weighted fusion |
Zhongxing LI( ),Yingzhu JIA,Guoqing GENG,Yixu QIN,Xinchang YANG ),Yingzhu JIA,Guoqing GENG,Yixu QIN,Xinchang YANG |
| School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China |
|
|
|
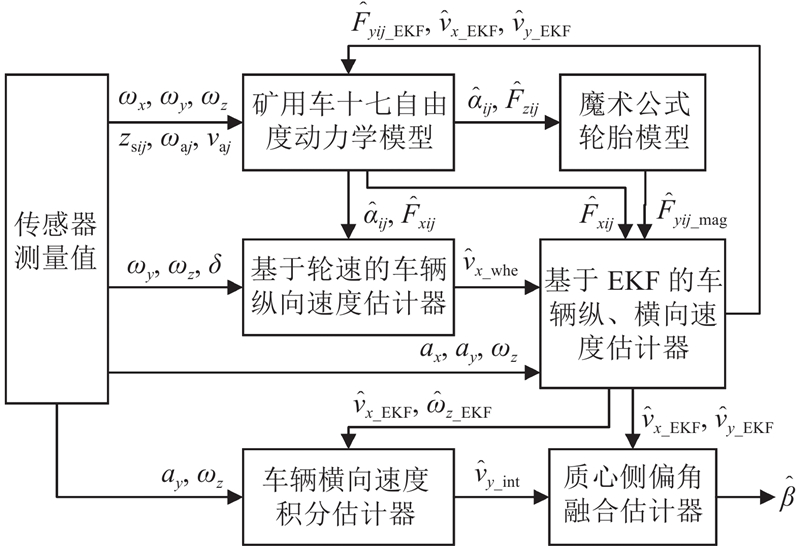
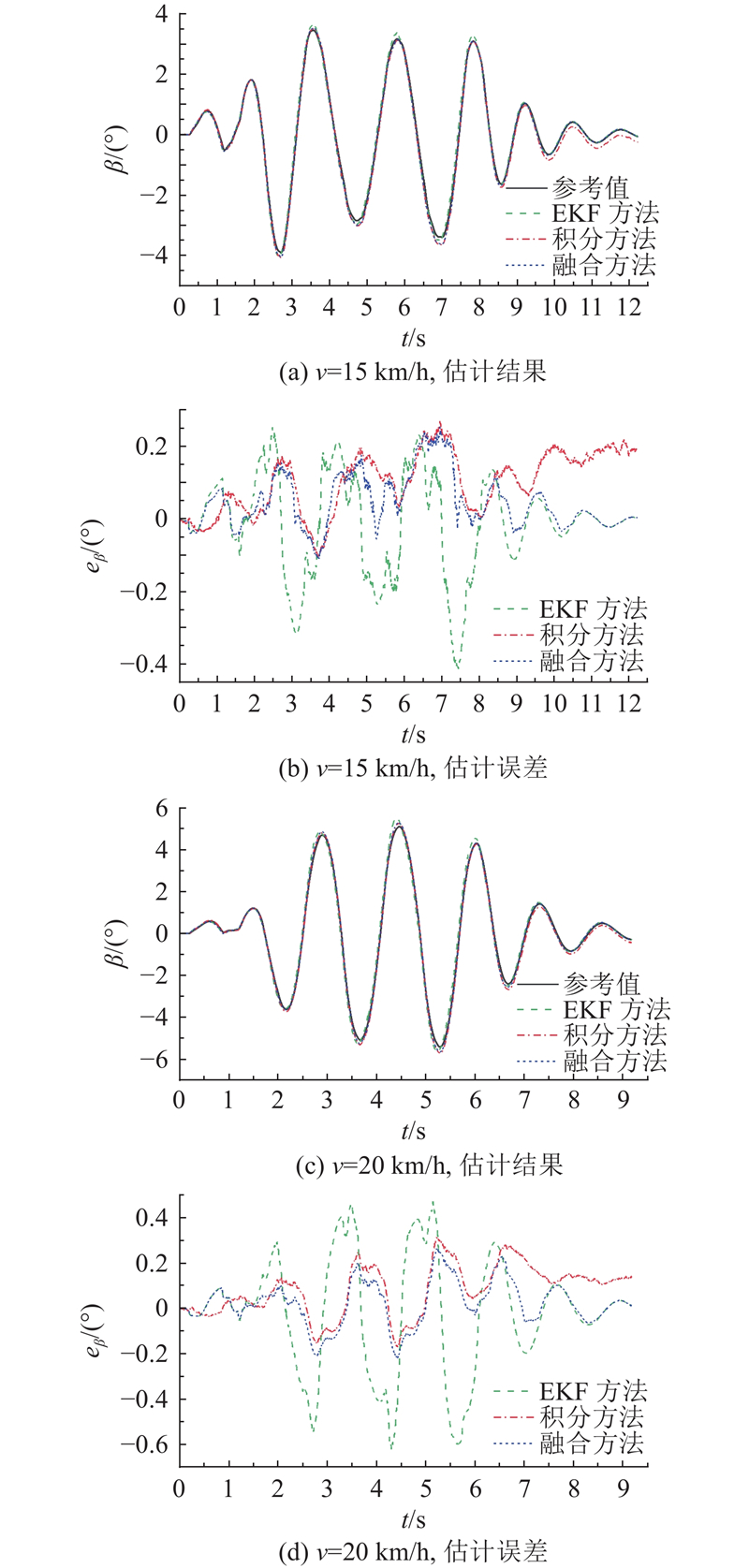
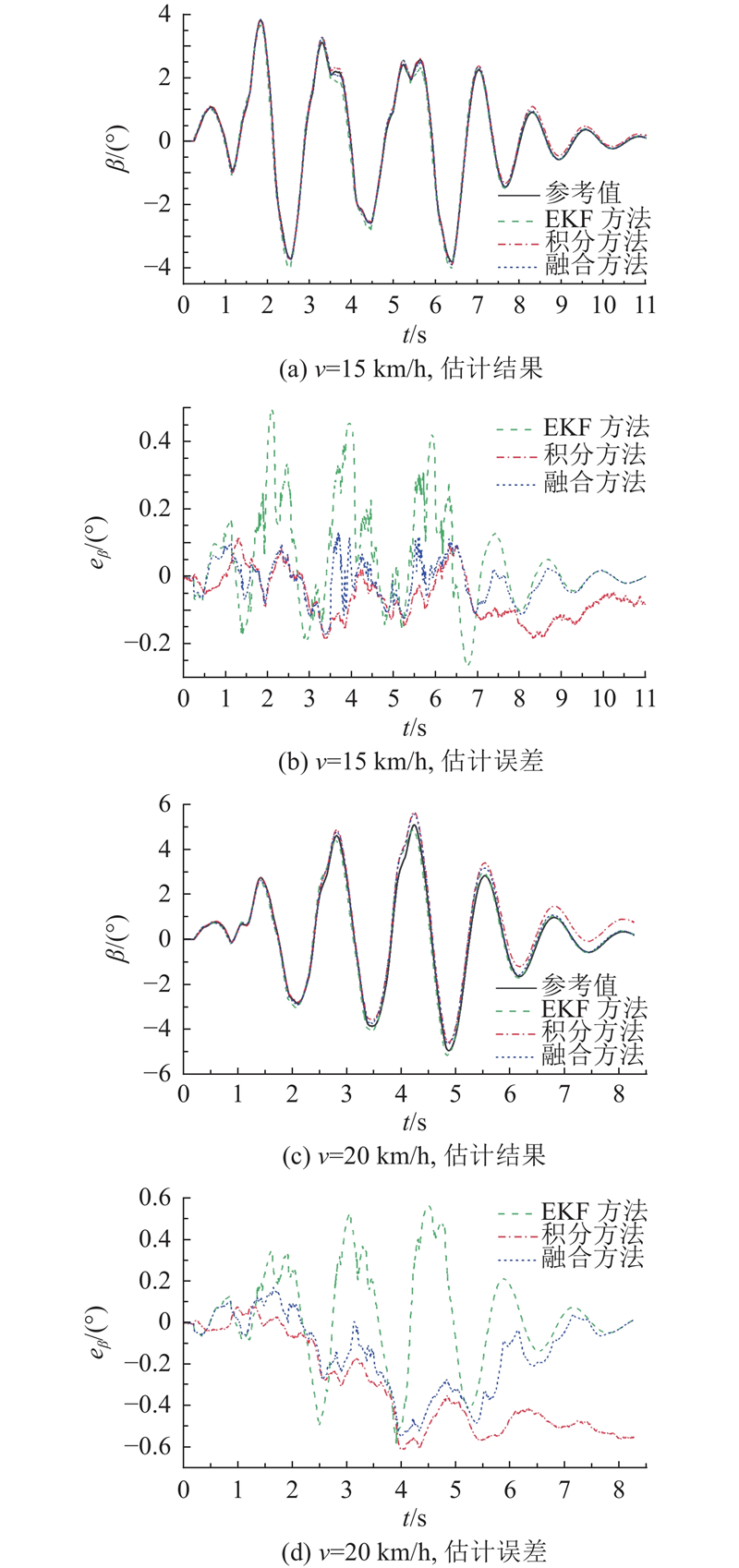
Abstract To address the challenge of estimating the sideslip angle of the mining truck in rugged terrain conditions, a sideslip angle estimation method based on the weighted fusion of the extended Kalman filter (EKF) method and the integration method was proposed. To accurately describe the vehicle’s motion state, a 17-DOF dynamic model of a mining truck incorporating both solid axle suspension and tandem suspension was established. Using a wheel-speed-based vehicle longitudinal speed estimator to obtain a preliminary estimate of the vehicle’s longitudinal velocity, a vehicle longitudinal and lateral velocity estimator based on EKF and a vehicle lateral velocity integration estimator were developed. Based on the characteristics of the EKF method and the integration method, a proportional-derivative fusion weight calculation method was proposed to fuse the two methods. Simulation results show that the proposed method can achieve accurate estimation of the vehicle’s sideslip angle by leveraging the advantages of both the EKF method and integration method, and has a good adaptability to the rugged terrain conditions.
|
|
Received: 25 September 2024
Published: 27 October 2025
|
|
|
基于多方法加权融合的矿用车质心侧偏角估计
针对矿用车在崎岖路面工况下质心侧偏角估计困难的问题,提出基于扩展卡尔曼滤波(EKF)方法和积分方法加权融合的质心侧偏角估计方法. 为了准确描述车辆运动状态,建立包含非独立悬架和平衡悬架的矿用车十七自由度动力学模型. 利用基于轮速的车辆纵向速度估计器获取车辆纵向速度初步估计值,构建基于EKF的车辆纵、横向速度估计器和车辆横向速度积分估计器. 根据EKF方法和积分方法的特点,提出比例-微分融合权重系数计算方法,借此对2种方法进行加权融合. 仿真实验结果表明,所提方法能够结合EKF方法和积分方法的优点,实现车辆质心侧偏角的准确估计,具有较好的崎岖路面工况适应能力.
关键词:
矿用车,
状态估计,
融合估计,
动力学模型,
质心侧偏角,
扩展卡尔曼滤波(EKF)
|
|
| [1] |
李兆强, 吴巧俊, 熊福力, 等. 基于点云曲面拟合的自适应阈值地面分割算法 [EB/OL]. (2024–08–21)[2024–09–05]. https://link.cnki.net/urlid/11.2127.TP.20240821.0831.006.
|
|
|
| [2] |
MAZZILLI V, DE PINTO S, PASCALI L, et al Integrated chassis control: classification, analysis and future trends[J]. Annual Reviews in Control, 2021, 51: 172- 205
doi: 10.1016/j.arcontrol.2021.01.005
|
|
|
| [3] |
SKRICKIJ V, KOJIS P, ŠABANOVIČ E, et al Review of integrated chassis control techniques for automated ground vehicles[J]. Sensors, 2024, 24 (2): 600
doi: 10.3390/s24020600
|
|
|
| [4] |
SINGH K B, ALI ARAT M, TAHERI S Literature review and fundamental approaches for vehicle and tire state estimation[J]. Vehicle System Dynamics, 2019, 57 (11): 1643- 1665
doi: 10.1080/00423114.2018.1544373
|
|
|
| [5] |
陈慧, 高博麟, 徐帆 车辆质心侧偏角估计综述[J]. 机械工程学报, 2013, 49 (24): 76- 94
CHEN Hui, GAO Bolin, XU Fan Review on vehicle sideslip angle estimation[J]. Journal of Mechanical Engineering, 2013, 49 (24): 76- 94
doi: 10.3901/JME.2013.24.076
|
|
|
| [6] |
JIN X, YIN G, CHEN N Advanced estimation techniques for vehicle system dynamic state: a survey[J]. Sensors, 2019, 19 (19): 4289
doi: 10.3390/s19194289
|
|
|
| [7] |
汪洪波, 徐世寒, 周道林, 等 基于模糊滑模观测器与传感器信号积分可拓融合的车辆质心侧偏角估计[J]. 北京理工大学学报, 2022, 42 (7): 713- 722
WANG Hongbo, XU Shihan, ZHOU Daolin, et al Vehicle mass-centroid sideslip angle estimation based on extension fusion of fuzzy sliding-mode observer and sensor signal integral[J]. Transactions of Beijing Institute of Technology, 2022, 42 (7): 713- 722
|
|
|
| [8] |
卢兴华, 季学武, 刘贺, 等 基于轮胎侧偏刚度变化率的车辆质心侧偏角融合估计算法[J]. 科学技术与工程, 2021, 21 (29): 12735- 12743
LU Xinghua, JI Xuewu, LIU He, et al Fusion estimation algorithm of vehicle sideslip angle based on changing rate of tire cornering stiffness[J]. Science Technology and Engineering, 2021, 21 (29): 12735- 12743
|
|
|
| [9] |
夏秋, 陈特, 陈龙, 等 基于冗余信息融合的车辆质心侧偏角估计方法[J]. 汽车工程, 2022, 44 (2): 280- 289
XIA Qiu, CHEN Te, CHEN Long, et al Vehicle sideslip angle estimation method based on redundant information fusion[J]. Automotive Engineering, 2022, 44 (2): 280- 289
|
|
|
| [10] |
CHEN T, CAI Y, CHEN L, et al Sideslip angle fusion estimation method of three-axis autonomous vehicle based on composite model and adaptive cubature Kalman filter[J]. IEEE Transactions on Transportation Electrification, 2024, 10 (1): 316- 330
doi: 10.1109/TTE.2023.3263592
|
|
|
| [11] |
WU Y, LI G, FAN D Joint estimation of driving state and road adhesion coefficient for distributed drive electric vehicle[J]. IEEE Access, 2021, 9: 75460- 75469
doi: 10.1109/ACCESS.2021.3081443
|
|
|
| [12] |
ZHANG Y, LI M, ZHANG Y, et al An enhanced adaptive unscented Kalman filter for vehicle state estimation[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 6502412
|
|
|
| [13] |
李韶华, 王桂洋, 杨泽坤, 等 基于DRBF-EKF算法的车辆质心侧偏角与路面附着系数动态联合估计[J]. 力学学报, 2022, 54 (7): 1853- 1865
LI Shaohua, WANG Guiyang, YANG Zekun, et al Dynamic joint estimation of vehicle sideslip angle and road adhesion coefficient based on DRBF-EKF algorithm[J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54 (7): 1853- 1865
|
|
|
| [14] |
QI D, FENG J, NI X, et al Maximum correntropy extended Kalman filter for vehicle state observation[J]. International Journal of Automotive Technology, 2023, 24 (2): 377- 388
doi: 10.1007/s12239-023-0031-8
|
|
|
| [15] |
张年瑞. 转弯制动工况下车辆状态估计及稳定性控制研究 [D]. 长春: 吉林大学, 2022: 1–67.
ZHANG Nianrui. Research on vehicle state estimation and handling stability control under cornering braking [D]. Changchun: Jilin University, 2022: 1–67.
|
|
|
| [16] |
陈建锋, 吴强, 葛新元, 等 基于切换策略的车辆质心侧偏角高性能获取[J]. 汽车工程, 2024, 46 (2): 346- 355
CHEN Jianfeng, WU Qiang, GE Xinyuan, et al High-performance acquisition for vehicle sideslip angle based on switch strategy[J]. Automotive Engineering, 2024, 46 (2): 346- 355
|
|
|
| [17] |
李小雨, 许男, 郭孔辉 基于运动学方法和运动几何方法融合的质心侧偏角估计[J]. 机械工程学报, 2020, 56 (2): 121- 129
LI Xiaoyu, XU Nan, GUO Konghui Vehicle sideslip angle estimation based on fusion of kinematic method and kinematic-geometry method[J]. Journal of Mechanical Engineering, 2020, 56 (2): 121- 129
doi: 10.3901/JME.2020.02.121
|
|
|
| [18] |
高自群, 谢桂芝, 周兵, 等 多方法融合的汽车质心侧偏角估计[J]. 浙江大学学报: 工学版, 2023, 57 (12): 2391- 2400
GAO Ziqun, XIE Guizhi, ZHOU Bing, et al Estimation of vehicle sideslip angle based on multi-method fusion[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (12): 2391- 2400
|
|
|
| [19] |
CHENG S, LI L, CHEN J Fusion algorithm design based on adaptive SCKF and integral correction for side-slip angle observation[J]. IEEE Transactions on Industrial Electronics, 2018, 65 (7): 5754- 5763
doi: 10.1109/TIE.2017.2774771
|
|
|
| [20] |
PARK G Vehicle sideslip angle estimation based on interacting multiple model Kalman filter using low-cost sensor fusion[J]. IEEE Transactions on Vehicular Technology, 2022, 71 (6): 6088- 6099
doi: 10.1109/TVT.2022.3161460
|
|
|
| [21] |
陈峥, 李磊磊, 舒星, 等 基于改进容量增量分析法的锂电池可用容量估计[J]. 中国公路学报, 2022, 35 (8): 20- 30
CHEN Zheng, LI Leilei, SHU Xing, et al Estimation of available capacity for lithium-ion battery based on improved increment capacity analysis[J]. China Journal of Highway and Transport, 2022, 35 (8): 20- 30
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|