|
|
|
| Estimation of vehicle sideslip angle based on multi-method fusion |
Zi-qun GAO1( ),Gui-zhi XIE2,Bing ZHOU1,Yan XU1,*(),Xiao-jian WU3,Tian CHAI1 ),Gui-zhi XIE2,Bing ZHOU1,Yan XU1,*(),Xiao-jian WU3,Tian CHAI1 |
1. State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University, Changsha 410082, China
2. National Engineering Research Center for High Efficiency Grinding, Hunan University, Changsha 410082, China
3. School of Advanced Manufacturing, Nanchang University, Nanchang 330031, China |
|
|
|
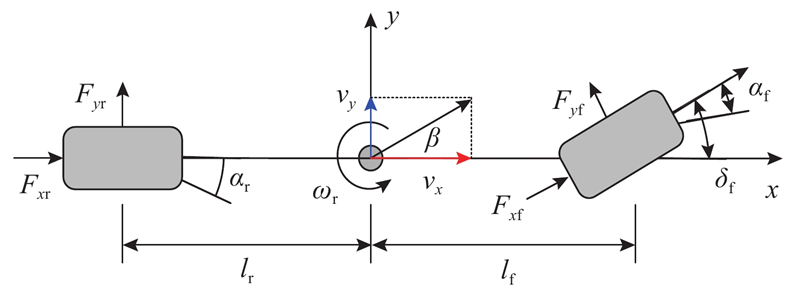
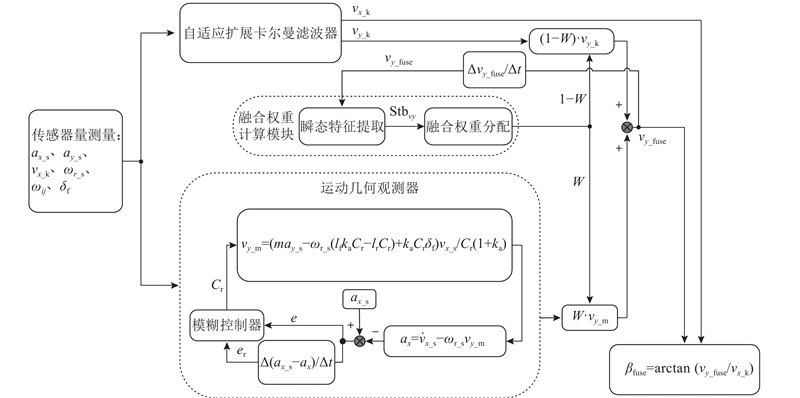
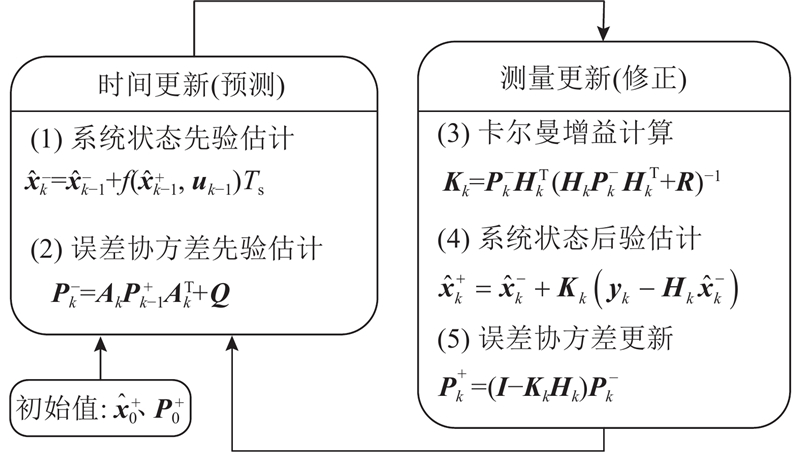
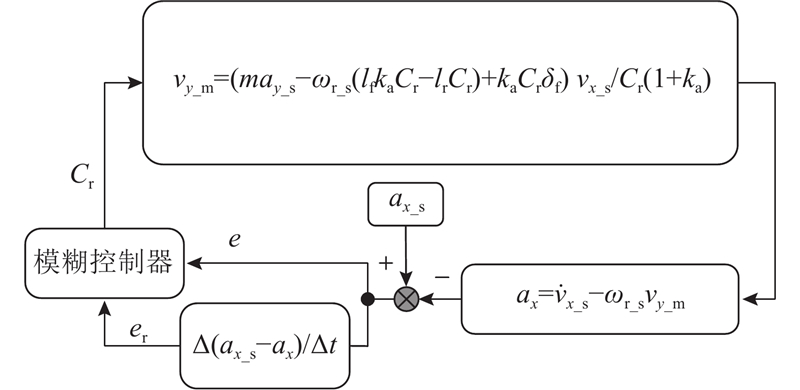
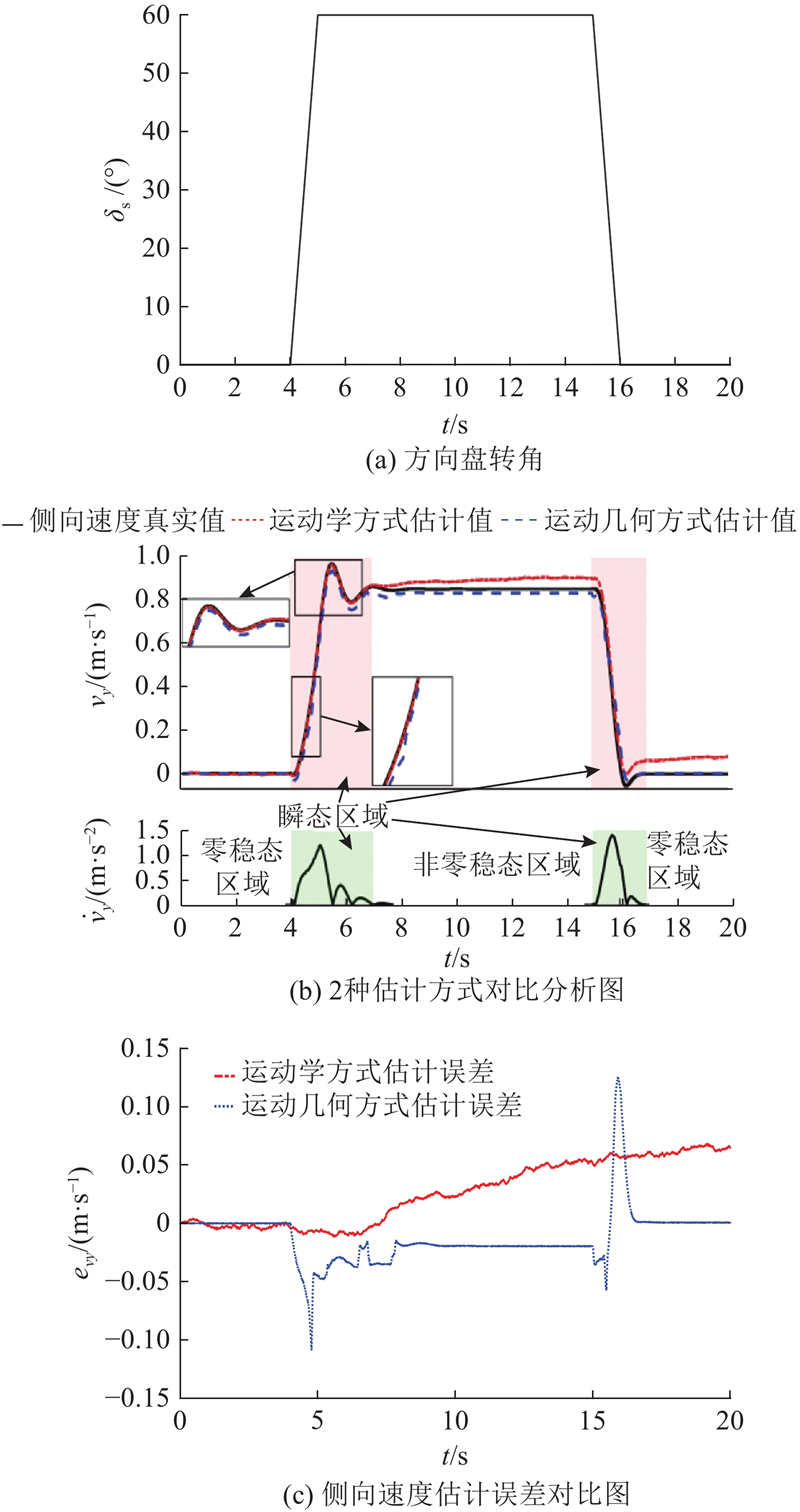
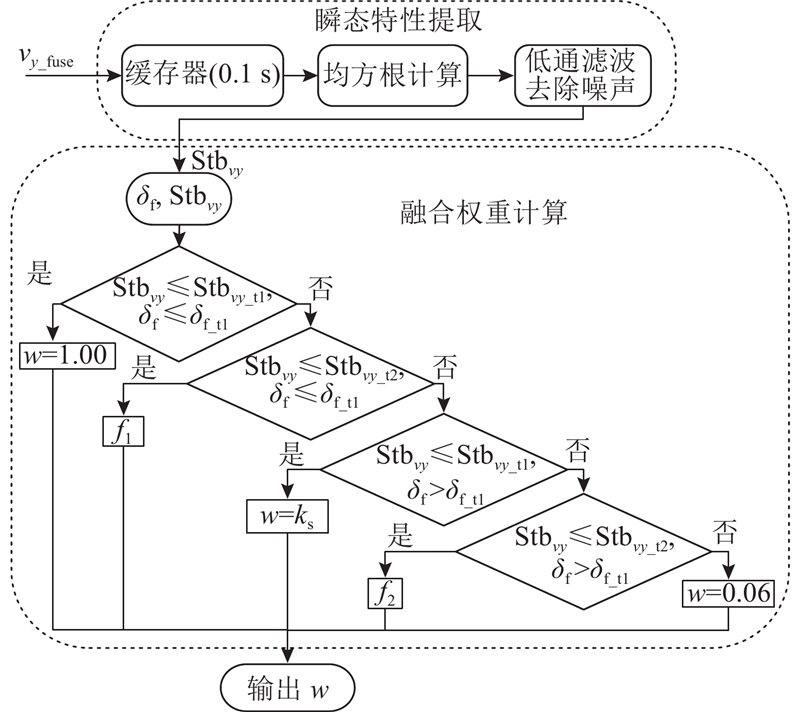
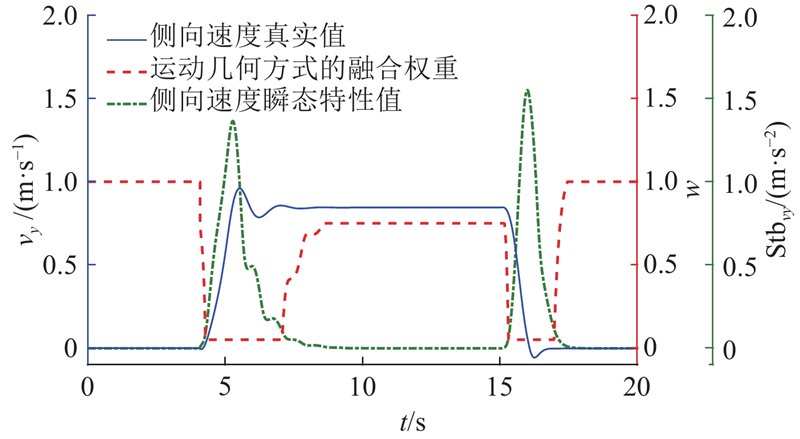
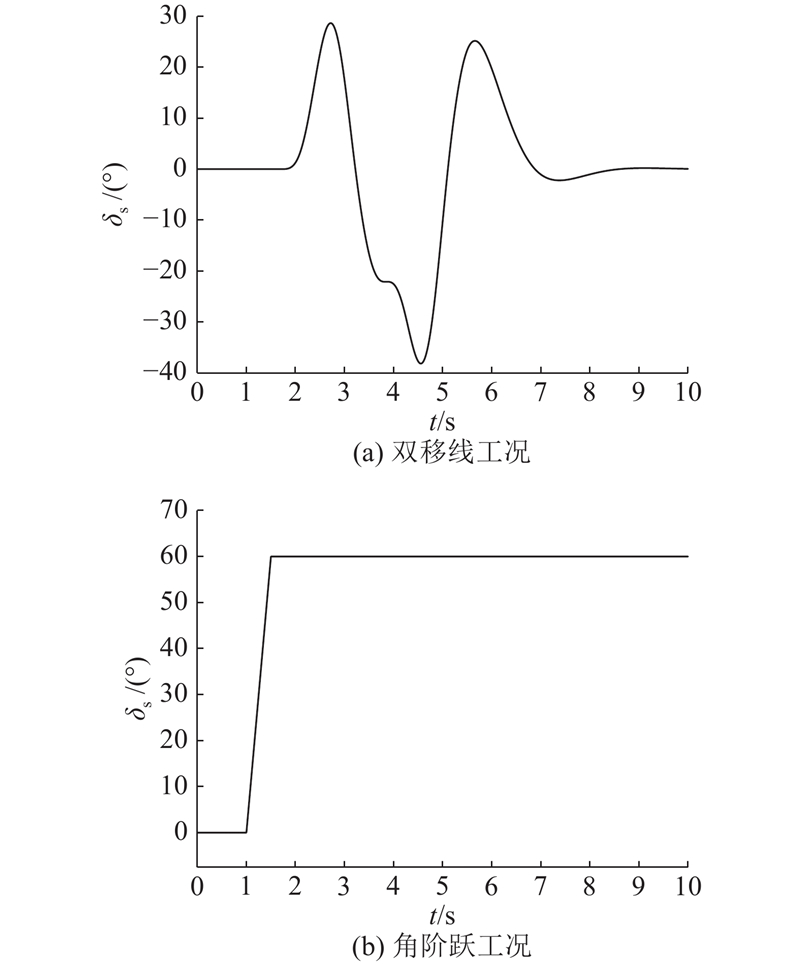
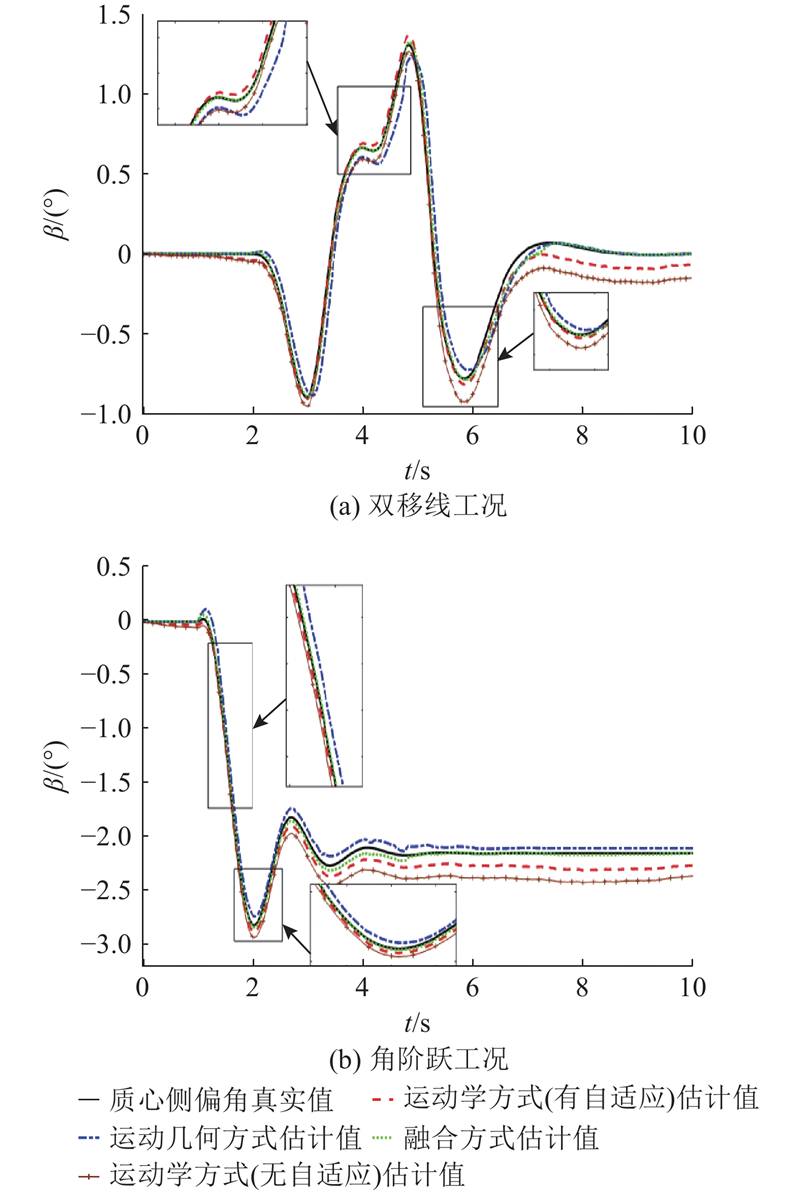
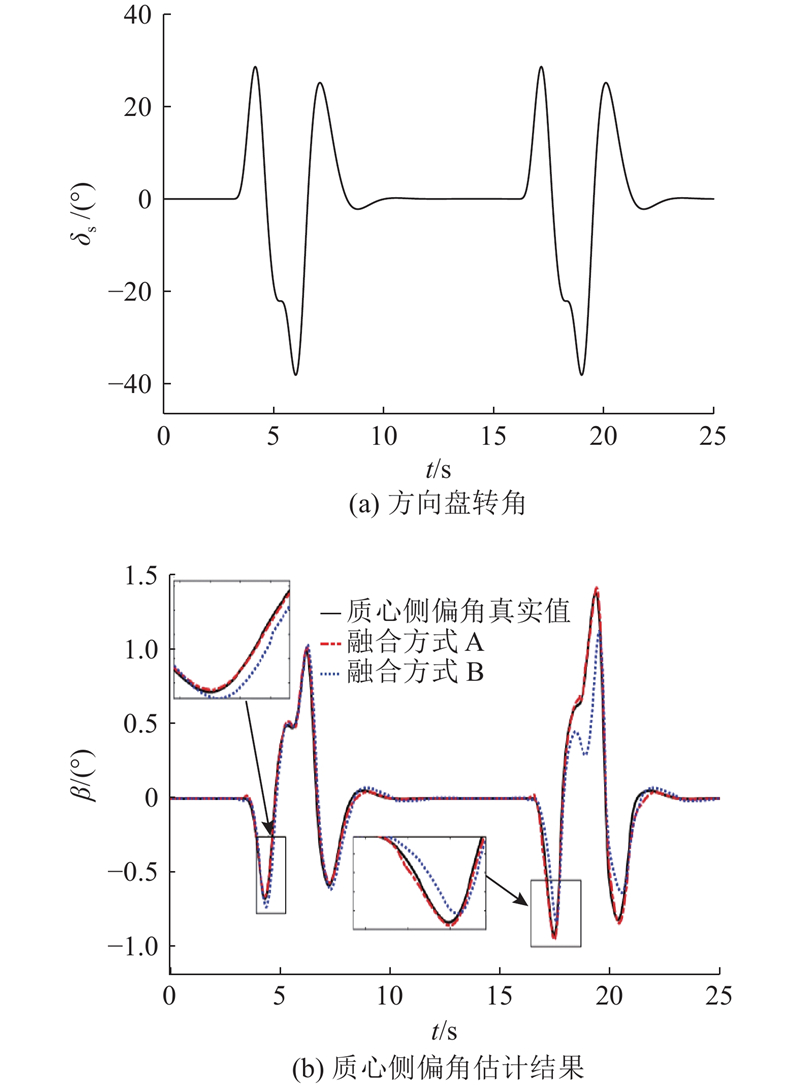
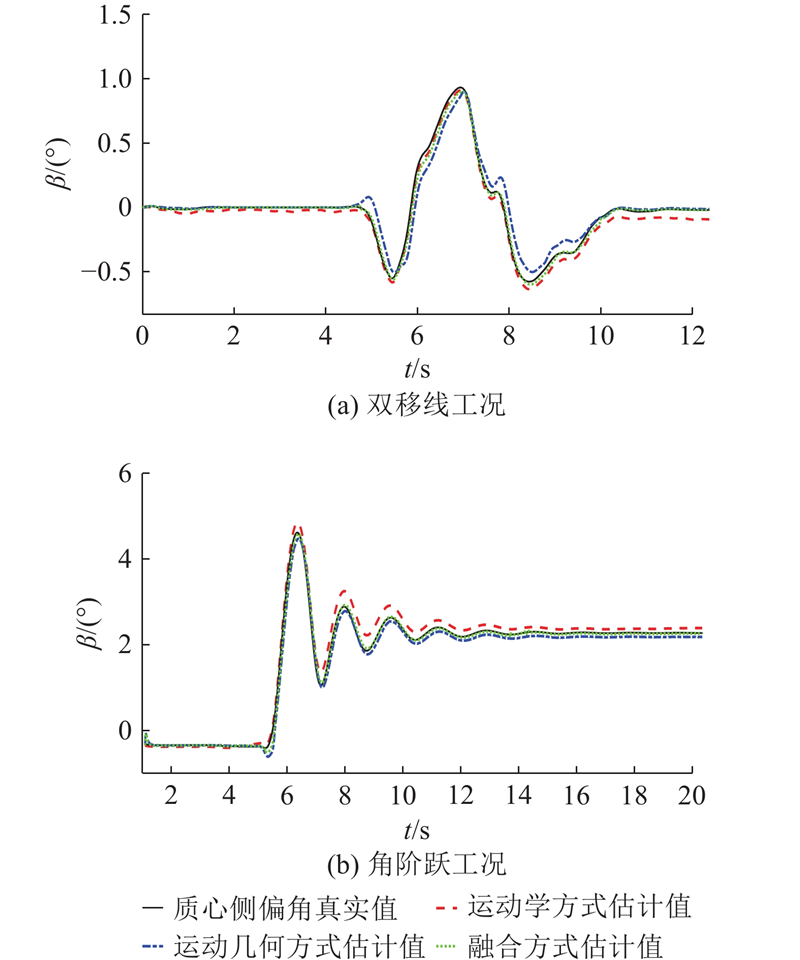
Abstract Due to the measurement noise uncertainty and the dependence on the road friction coefficient, the estimation accuracy of the vehicle sideslip angle fusion estimation was affected, and a fusion estimation algorithm of the vehicle sideslip angle based on the kinematic method and the kinematic-geometry method was proposed. An adaptive extended Kalman filter was established based on the three-degree-of-freedom vehicle kinematics equation to estimate the lateral and the longitudinal velocities of vehicles. A fuzzy adaptive kinematic geometry estimator for the tyre lateral stiffness was designed to estimate the vehicle lateral velocity. According to the differences in the applicability of two estimation methods, a lateral velocity weighted fusion algorithm based on the transient characteristics extraction was designed. Using the fusion result of the lateral velocity and the longitudinal velocity estimated by kinematic method, the vehicle sideslip angle was calculated. Results of Carsim-Simulink simulation and the driver in loop test show that the proposed algorithm has high real-time estimation accuracy and robustness to changes in the road friction coefficient.
|
|
Received: 18 October 2022
Published: 27 December 2023
|
|
|
| Fund: 国家自然科学基金资助项目(51875184,52002163,52262054) |
|
Corresponding Authors:
Yan XU
E-mail: gzq96@hnu.edu.cn;xuyanzb@163.com
|
多方法融合的汽车质心侧偏角估计
汽车质心侧偏角融合估计过程中存在量测噪声不确定、依赖路面附着系数问题,影响估计精度,为此提出联合运动学方式与运动几何方式的质心侧偏角融合估计算法. 利用三自由度车辆运动学方程建立自适应扩展卡尔曼滤波器,用于车辆侧、纵向速度估计. 设计轮胎侧偏刚度模糊自适应的运动几何估计器,以实现车辆侧向速度估计. 根据2种估计方式适用性的差异,设计基于瞬态特性提取的侧向速度加权融合算法,利用侧向速度融合结果与运动学方式估计的纵向速度计算车辆质心侧偏角. Carsim-Simulink的仿真与驾驶员在环试验结果表明,所提算法具有高实时估计精度和路面附着系数变化的鲁棒性.
关键词:
质心侧偏角估计,
运动学估计方式,
运动几何估计方式,
加权融合估计,
模糊控制
|
|
| [1] |
KANG J, YOO J, YI K Driving control algorithm for maneuverability, lateral stability, and rollover prevention of 4WD electric vehicles with Independently driven front and rear wheels[J]. IEEE Transactions on Vehicular Technology, 2011, 60 (7): 2987- 3001
doi: 10.1109/TVT.2011.2155105
|
|
|
| [2] |
GUSTAFSSON F Automotive safety systems[J]. IEEE Signal Processing Magazine, 2009, 26 (4): 32- 47
doi: 10.1109/MSP.2009.932618
|
|
|
| [3] |
MAMMAR S, KOENIG D Vehicle handling improvement by active steering[J]. Vehicle System Dynamics, 2002, 38 (3): 211- 242
doi: 10.1076/vesd.38.3.211.8288
|
|
|
| [4] |
STEPHANT J, CHARARA A, MEIZEL D Evaluation of a sliding mode observer for vehicle sideslip angle[J]. Control Engineering Practice, 2007, 15 (7): 803- 812
doi: 10.1016/j.conengprac.2006.04.002
|
|
|
| [5] |
LI X Y, XU N, LI Q, et al A fusion methodology for sideslip angle estimation on the basis of kinematics-based and model-based approaches[J]. Journal of Automobile Engineering, 2020, 234 (7): 1930- 1943
|
|
|
| [6] |
LI L, JIA G, RAN X, et al A variable structure extended Kalman filter for vehicle sideslip angle estimation on a low friction road[J]. Vehicle System Dynamics, 2014, 52 (2): 280- 308
doi: 10.1080/00423114.2013.877148
|
|
|
| [7] |
ZHAO L H, LIU Z Y, CHEN H Design of a nonlinear observer for vehicle velocity estimation and experiments[J]. IEEE Transactions on Control Systems Technology, 2011, 19 (3): 664- 672
doi: 10.1109/TCST.2010.2043104
|
|
|
| [8] |
YU Z P Review of vehicle state estimation problem under driving situation[J]. Journal of Mechanical Engineering, 2009, 45 (5): 20- 33
doi: 10.3901/JME.2009.05.020
|
|
|
| [9] |
GUO H Y, CAO D P, CHEN H, et al Vehicle dynamic state estimation: state of the art schemes and perspectives[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5 (2): 418- 431
doi: 10.1109/JAS.2017.7510811
|
|
|
| [10] |
ZHANG Z Y, ZHANG S Z, HUANG C X, et al State estimation of distributed drive electric vehicle based on adaptive extended Kalman filter[J]. Journal of Mechanical Engineering, 2019, 55 (6): 156
doi: 10.3901/JME.2019.06.156
|
|
|
| [11] |
ZHANG Q, LIU Z Y, GU M Q, et al. Vehicle sideslip angle estimation based on switched fuzzy model [C]// 2019 IEEE 58th Conference on Decision and Control (CDC). Nice: IEEE, 2019: 4817-4822.
|
|
|
| [12] |
PIYABONGKARN D, RAJAMANI R, GROGG J A, et al Development and experimental evaluation of a slip angle estimator for vehicle stability control[J]. IEEE Transactions on Control Systems Technology, 2008, 17 (1): 78- 88
|
|
|
| [13] |
PIYABONGKARN D , RAJAMANI R , GROGG J A, et al. Development and experimental evaluation of a slip angle estimator for vehicle stability control [C]// 2006 American Control Conference. Minneapolis: IEEE, 2006: 5366-5371.
|
|
|
| [14] |
李小雨. 复合工况下分布式驱动电动汽车失稳机理及操纵稳定性控制研究 [D]. 长春: 吉林大学, 2020: 43-44.
LI Xiao-yu. Research on instability mechanism and handling stability control of distributed drive electric vehicles under combined slip condition [D]. Changchun: Jilin University, 2020: 43-44.
|
|
|
| [15] |
YOU S H, HAHN J O, LEE H New adaptive approaches to real-time estimation of vehicle sideslip angle[J]. Control Engineering Practice, 2009, 17 (12): 1367- 1379
doi: 10.1016/j.conengprac.2009.07.002
|
|
|
| [16] |
NISHIO A, TOZU K, YAMAGUCHI H, et al. Development of vehicle stability control system based on vehicle sideslip angle estimation [C]// SAE 2001 World Congress. Michigan: SAE, 2006: 1-10.
|
|
|
| [17] |
GAO B L, XIE S G, GONG J F Vehicle sideslip angle estimation based on fusion of kinematics-dynamics methods[J]. Automotive Safety and Energy, 2015, 6 (1): 72- 78
|
|
|
| [18] |
高博麟, 陈慧, 陈威, 等 汽车质心侧偏角融合估计方法[J]. 汽车工程, 2013, 35 (8): 717- 722
GAO Bo-lin, CHEN Hui, CHEN Wei, et al Fusion estimation of vehicle sideslip angle[J]. Automotive Engineering, 2013, 35 (8): 717- 722
|
|
|
| [19] |
KIM K H, LEE J G, CHAN G P Adaptive two-stage extended Kalman filter for a fault-tolerant INS-GPS loosely coupled system[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45 (1): 125- 137
doi: 10.1109/TAES.2009.4805268
|
|
|
| [20] |
CHELI F, SABBIONI E, PESCE M, et al A methodology for vehicle sideslip angle identification: comparison with experimental data[J]. Vehicle System Dynamics, 2007, 45 (6): 549- 563
doi: 10.1080/00423110601059112
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|