|
|
|
| Research overview on touchdown detection methods for footed robots |
Xiaoyong JIANG1,2( ),Kaijian YING1,Qiwei WU1,Xuan WEI1 ),Kaijian YING1,Qiwei WU1,Xuan WEI1 |
1. School of Mechanical and Energy Engineering, Zhejiang University of Science and Technology, Hangzhou 310000, China
2. School of Mechanical Engineering, Zhejiang University, Hangzhou 310058, China |
|
|
|
Abstract The effects of leg structure design, foot-end design and sensor design on touchdown detection were comprehensively discussed by analyzing the existing legged robot touchdown detection methods. The touchdown method for direct detection of external sensors, the touchdown detection method based on kinematics and dynamics, and the touchdown detection method based on learning were summarized. Touchdown detection methods were summarized in three special scenarios: slippery ground, soft ground, and non-foot-end contact. The application scenarios of touchdown detection technology were analyzed, including the three application scenarios of motion control requirements, navigation applications, and terrain and geological sensing. The development trends were pointed out, which related to the four major touchdown detection methods of hardware improvement and integration, multi-mode touchdown detection, multi-sensor fusion touchdown detection, and intelligent touchdown detection. The specific relationships between various touchdown detection algorithms were summarized, which provided guidance for the development of follow-up technology for touchdown detection and specific applications of touchdown detection.
|
|
Received: 06 July 2023
Published: 23 January 2024
|
|
|
| Fund: 国家自然科学基金资助项目(51675480) |
足式机器人触地检测方法的研究综述
基于现有足式机器人触地检测方法的研究,综合论述了腿部结构设计、足端设计、传感器设计对触地检测的影响. 总结外部传感器直接检测的触地检测方法、基于运动学与动力学的触地检测方法以及基于学习的触地检测方法. 归纳地面湿滑、地面松软以及非足端触地这3种特殊场景中的触地检测方法. 分析触地检测技术的应用场景,具体包括运动控制的需要、导航中的应用、地形与地质的感知这三大应用场景. 指出硬件改进和集成、多模态触地检测、多传感器融合化触地检测以及智能化触地检测这四大触地检测方法相关的发展趋势,总结各触地检测算法之间的具体关联,为触地检测后续技术的发展及触地检测的具体应用提供指导.
关键词:
足式机器人,
触地检测,
力传感器,
状态估计,
足端力估计
|
|
| [54] |
GONG Y, HARTLEY R, DA X, et al. Feedback control of a cassie bipedal robot: Walking, standing, and riding a segway [C]//2019 American Control Conference. Philadelphia: IEEE, 2019: 4559-4566.
|
|
|
| [55] |
WANG S, BHATIA A, MASON M T, et al. Contact localization using velocity constraints [J]. IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 7351−7358.
|
|
|
| [56] |
HWANGBO J, BELLICOSO C D, FANKHAUSER P, et al. Probabilistic foot contact estimation by fusing information from dynamics and differential/forward kinematics [C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 3872-3878.
|
|
|
| [57] |
NEUNERT M, FARSHIDIAN F, WINKLER A W, et al Trajectory optimization through contacts and automatic gait discovery for quadrupeds[J]. IEEE Robotics and Automation Letters, 2017, 2 (3): 1502- 1509
doi: 10.1109/LRA.2017.2665685
|
|
|
| [58] |
HUYNH B P, BAE J. Impact intensity estimation of aquadruped robot without using a force sensor [EB/OL]. (2022-04-03)[2023-10-08]. https://arxiv.org/pdf/2204.01003.
|
|
|
| [59] |
CAMURRI M, FALLON M, BAZEILLE S, et al Probabilistic contact estimation and impact detection for state estimation of quadruped robots[J]. IEEE Robotics and Automation Letters, 2017, 2 (2): 1023- 1030
doi: 10.1109/LRA.2017.2652491
|
|
|
| [60] |
LIN T Y, ZHANG R, YU J, et al. Legged robot state estimation using invariant Kalman filtering and learned contact events [EB/OL]. (2022-11-29)[2023-10-08]. https://arxiv.org/pdf/2106.15713.
|
|
|
| [61] |
PIPERAKIS S, MARAVGAKIS M, KANOULAS D, et al. Robust contact state estimation in humanoid walking gaits [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyoto: IEEE, 2022: 6732-6738.
|
|
|
| [62] |
NAHRENDRA I M A, YU B, MYUNG H. Dreamwaq: learning robust quadrupedal locomotion with implicit terrain imagination via deep reinforcement learning [C]//IEEE International Conference on Robotics and Automation. London: IEEE, 2023: 5078-5084.
|
|
|
| [63] |
TAKEMURA H, DEGUCHI M, UEDA J, et al Slip-adaptive walk of quadruped robot[J]. Robotics and Autonomous Systems, 2005, 53 (2): 124- 141
doi: 10.1016/j.robot.2005.07.002
|
|
|
| [64] |
FOCCHI M, BARASUOL V, FRIGERIO M, et al Slip detection and recovery for quadruped robots[J]. Robotics Research, 2018, 2 (11): 185- 199
|
|
|
| [65] |
TESHIGAWARA S, SHIMIZU S, TADAKUMA K, et al. High sensitivity slip sensor using pressure conductive rubber [C]//IEEE Sensors. Christchurch: IEEE, 2009: 988-991.
|
|
|
| [1] |
CHAI H, LI Y, SONG R, et al A survey of the development of quadruped robots: joint configuration, dynamic locomotion control method and mobile manipulation approach[J]. Biomimetic Intelligence and Robotics, 2022, 2 (1): 100029
doi: 10.1016/j.birob.2021.100029
|
|
|
| [2] |
PIPERAKIS S, TRAHANIAS P. Non-linear ZMP based state estimation for humanoid robot locomotion[C]//IEEE-RAS 16th International Conference on Humanoid Robots. Cancun: IEEE, 2016: 202-209.
|
|
|
| [66] |
IWASAKI T, TAKESHITA T, ARINAGA Y, et al Shearing force measurement device with a built-in integrated micro displacement sensor[J]. Sensors and Actuators A: Physical, 2015, 221: 1- 8
|
|
|
| [67] |
JENELTEN F, HWANGBO J, TRESOLDI F, et al Dynamic locomotion on slippery ground[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 4170- 4176
doi: 10.1109/LRA.2019.2931284
|
|
|
| [68] |
KOLVENBACH H, ARM P, HAMPP E, et al. Traversing steep and granular martian analog slopes with a dynamic quadrupedal robot [EB/OL]. (2021-06-03)[2023-10-08]. https://arxiv.org/pdf/2106.01974.
|
|
|
| [69] |
SHIRWATKAR A, KUMAR S, AMRUTUR B, et al. Realizing linear controllers for quadruped robots on planetary terrains [EB/OL]. [2023-10-08]. https://hex-plex.github.io/publication/exploration/exploration.pdf.
|
|
|
| [70] |
MAKOVIYCHUK V, WAWRZYNIAK L, GUO Y, et al. Isaac gym: high performance GPU-based physics simulation for robot learning [EB/OL]. (2021-08-25)[2023-10-08]. https://arxiv.org/pdf/2108.10470.
|
|
|
| [71] |
SIVA S, WIGNESS M, ROGERS J, et al. Enhancing consistent ground maneuverability by robot adaptation to complex off-road terrains [C]//Conference on Robot Learning. London: PMLR, 2022: 1200-1210.
|
|
|
| [72] |
HULAS J, ZHOU C. Improving quadrupedal locomotion on granular material using genetic algorithm [C]//Robots into the Real World. England: ResearchGate, 2020: 33-34.
|
|
|
| [73] |
AJEWOLE P O, MANUWA S I. Establishment of Bekker's model for predicting the pressure-sinkage behaviour of a loamy sand soil [EB/OL]. (2014-09)[2023-10-08]. https://www.researchgate.net/publication/267186683_Establishment_of_Bekker%27s_Model_for_Predicting_the_Pressure-Sinkage_Behaviour_of_a_Loamy_Sand_Soil.
|
|
|
| [74] |
AGUILAR J, GOLDMAN D I Robophysical study of jumping dynamics on granular media[J]. Nature Physics, 2016, 12 (3): 278- 283
doi: 10.1038/nphys3568
|
|
|
| [75] |
JOHNSON J B, DUVOY P X, KULCHITSKY A V, et al Analysis of Mars Exploration Rover wheel mobility processes and the limitations of classical terramechanics models using discrete element method simulations[J]. Journal of Terramechanics, 2017, 73: 61- 71
doi: 10.1016/j.jterra.2017.09.002
|
|
|
| [76] |
DEL PRETE A, NORI F, METTA G, et al. Control of contact forces: the role of tactile feedback for contact localization [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve: IEEE, 2012: 4048-4053.
|
|
|
| [77] |
DE LUCA A, MATTONE R. Sensorless robot collision detection and hybrid force/motion control [C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona: IEEE, 2005: 999-1004.
|
|
|
| [78] |
DE LUCA A, ALBU-SCHAFFER A, HADDADIN S, et al. Collision detection and safe reaction with the DLR-III lightweight manipulator arm [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 1623-1630.
|
|
|
| [79] |
VORNDAMME J, SCHAPPLER M, HADDADIN S. Collision detection, isolation and identification for humanoids [C]//IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017: 4754-4761.
|
|
|
| [80] |
MANUELLI L, TEDRAKE R. Localizing external contact using proprioceptive sensors: the contact particle filter [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 5062-5069.
|
|
|
| [81] |
BARASUOL V, FINK G, FOCCHI M, et al. On the detection and localization of shin collisions and reactive actions in quadruped robots [C]//International Conference on Climbing and Walking Robots. Kuala Lumpur: Scholars Archive, 2019: 49-51.
|
|
|
| [82] |
MORALES J, MARTINEZ J L, MANDOW A, et al Static tip-over stability analysis for a robotic vehicle with a single-axle trailer on slopes based on altered supporting polygons[J]. IEEE/ASME Transactions on Mechatronics, 2012, 18 (2): 697- 705
|
|
|
| [83] |
KIM H G, LEE D G, SEO T W Rolling stability enhancement via balancing tail for a water-running robot[J]. Journal of Bionic Engineering, 2015, 12 (3): 395- 405
doi: 10.1109/TSMC.1979.4310180
|
|
|
| [84] |
DIANSHENG C, SITONG L, XUANHAI L, et al. Stability analysis of a mobile health care robot [C]//IEEE International Conference on Real-time Computing and Robotics. Angkor Wat: IEEE, 2016: 591-596.
|
|
|
| [85] |
ZHU H, LUO M, MEI T, et al Energy-efficient bio-inspired gait planning and control for biped robot based on human locomotion analysis[J]. Journal of Bionic Engineering, 2016, 13 (2): 271- 282
doi: 10.1016/S1672-6529(16)60300-1
|
|
|
| [86] |
SARDAIN P, BESSONNET G Forces acting on a biped robot. center of pressure-zero moment point[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2004, 34 (5): 630- 637
doi: 10.1109/TSMCA.2004.832811
|
|
|
| [87] |
BELLICOSO C D, JENELTEN F, GEHRING C, et al Dynamic locomotion through online nonlinear motion optimization for quadrupedal robots[J]. IEEE Robotics and Automation Letters, 2018, 3 (3): 2261- 2268
doi: 10.1109/LRA.2018.2794620
|
|
|
| [88] |
KHORRAM M, MOOSAVIAN S A A. Balance recovery of a quadruped robot [C]//3rd RSI International Conference on Robotics and Mechatronics. Tehran: IEEE, 2015: 259-264.
|
|
|
| [89] |
CHEROUVIM N, PAPADOPOULOS E. Use of a novel multipart controller for the parametric study of a trotting quadruped robot [C]//IEEE International Conference on Robotics and Automation. Pasadena: IEEE, 2008: 805-810.
|
|
|
| [90] |
DI CARLO J, WENSING P M, KATZ B, et al. Dynamic locomotion in the mit cheetah 3 through convex model-predictive control [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 1-9.
|
|
|
| [91] |
BUCHANAN R, CAMURRI M, FALLON M. Haptic sequential Monte Carlo localization for quadrupedal locomotion in vision-denied scenarios [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyoto: IEEE, 2020: 3657-3663.
|
|
|
| [92] |
WISTH D, CAMURRI M, FALLON M VILENS: visual, inertial, lidar, and leg odometry for all-terrain legged robots[J]. IEEE Transactions on Robotics, 2022, 39 (1): 309- 326
|
|
|
| [93] |
LENS T, RADKHAH K, VON STRYK O. Simulation of dynamics and realistic contact forces for manipulators and legged robots with high joint elasticity [C]//15th International Conference on Advanced Robotics. Tallinn: IEEE, 2011: 34-41.
|
|
|
| [94] |
KOLVENBACH H, BREITENSTEIN M, GEHRING C, et al. Scalability analysis of legged robots for space exploration [C]//68th International Astronautical Congress. Adelaide: Curran, 2018: 10399-10413.
|
|
|
| [95] |
MUDALIGE N D W, NAZAROVA E, BABATAEV I, et al. Dogtouch: CNN-based recognition of surface textures by quadruped robot with high density tactile sensors [C]//IEEE 95th Vehicular Technology Conference. Helsinki: IEEE, 2022: 1-5.
|
|
|
| [96] |
SHI G, YAO C, WANG W, et al. Adaptive planar foot with compliant ankle joint and multi-modal sensing for quadruped robots [C]//IEEE International Conference on Robotics and Biomimetics. Xishuangbanna: IEEE, 2022: 52-57.
|
|
|
| [97] |
KOLVENBACH H, BARTSCHI C, WELLHAUSEN L, et al Haptic inspection of planetary soils with legged robots[J]. IEEE Robotics and Automation Letters, 2019, 4 (2): 1626- 1632
doi: 10.1109/LRA.2019.2896732
|
|
|
| [98] |
CHUAH M Y M, EPSTEIN L, KIM D, et al. Bi-modal hemispherical sensor: a unifying solution for three axis force and contact angle measurement [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Macau: IEEE, 2019: 7968-7975.
|
|
|
| [99] |
CHILIAN A, HIRSCHMULLER H, GORNER M. Multisensor data fusion for robust pose estimation of a six-legged walking robot [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011: 2497-2504.
|
|
|
| [100] |
MA J, BAJRACHARYA M, SUSCA S, et al Real-time pose estimation of a dynamic quadruped in GPS-denied environments for 24-hour operation[J]. The International Journal of Robotics Research, 2016, 35 (6): 631- 653
doi: 10.1177/0278364915587333
|
|
|
| [101] |
NOBILI S, CAMURRI M, BARASUOL V, et al. Heterogeneous sensor fusion for accurate state estimation of dynamic legged robots [C]//Robotics: Science and Systems. Cambridge: [s. n. ], 2017.
|
|
|
| [3] |
FOURMY M, FLAYOLS T, LEZIART P A, et al. Contact forces preintegration for estimation in legged robotics using factor graphs [C]//2021 IEEE International Conference on Robotics and Automation. Xi'an: IEEE, 2021: 1372-1378.
|
|
|
| [4] |
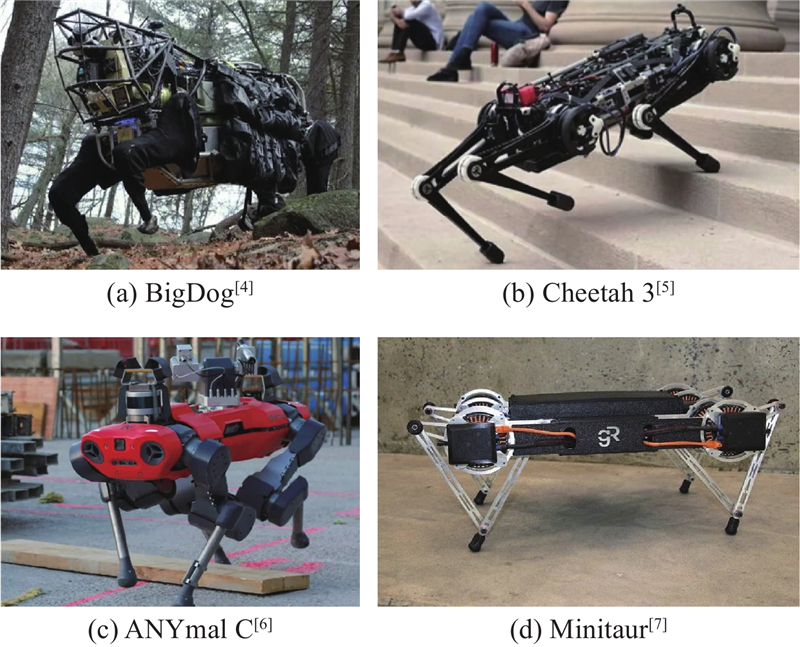
PLAYTER R, BUEHLER M, RAIBERT M. BigDog [C]//Unmanned Systems Technology VIII. Florida: SPIE, 2006: 896-901.
|
|
|
| [5] |
BLEDT G, POWELL M J, KATZ B, et al. Mit cheetah 3: design and control of a robust, dynamic quadruped robot [C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 2245-2252.
|
|
|
| [6] |
SHI F, HOMBERGER T, LEE J, et al. Circus anymal: a quadruped learning dexterous manipulation with its limbs [C]//IEEE International Conference on Robotics and Automation. Xi'an: IEEE, 2021: 2316-2323.
|
|
|
| [7] |
BLACKMAN D J, NICHOLSON J V, ORDONEZ C, et al. Gait development on minitaur, a direct drive quadrupedal robot [C]//Unmanned Systems Technology XVIII. Baltimore: SPIE, 2016: 141-155.
|
|
|
| [8] |
GARCIA E, DE SANTOS P G On the improvement of walking performance in natural environments by a compliant adaptive gait[J]. IEEE Transactions on Robotics, 2006, 22 (6): 1240- 1253
doi: 10.1109/TRO.2006.884343
|
|
|
| [9] |
ZHANG X, ZHENG H Walking up and down hill with a biologically-inspired postural reflex in a quadrupedal robot[J]. Autonomous Robots, 2008, 1 (25): 15- 24
|
|
|
| [10] |
HIROSE S, FUKUDA Y, YONEDA K, et al Quadruped walking robots at Tokyo Institute of Technology[J]. IEEE Robotics and Automation Magazine, 2009, 16 (2): 104- 114
doi: 10.1109/MRA.2009.932524
|
|
|
| [11] |
NELSON G, SAUNDERS A, NEVILLE N, et al Petman: a humanoid robot for testing chemical protective clothing[J]. Journal of the Robotics Society of Japan, 2012, 30 (1): 372- 377
|
|
|
| [12] |
KANEKO K, HARADA K, KANEHIRO F, et al. Humanoid robot HRP-3 [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice: IEEE, 2008: 2471-2478.
|
|
|
| [13] |
GRIFFIN R J, WIEDEBACH G, BERTRAND S, et al. Walking stabilization using step timing and location adjustment on the humanoid robot, atlas [C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver: IEEE, 2017: 667-673.
|
|
|
| [14] |
KATZ B, DI CARLO J, KIM S. Mini cheetah: a platform for pushing the limits of dynamic quadruped control [C]// International Conference on Robotics and Automation. Montreal: IEEE, 2019: 6295-6301.
|
|
|
| [15] |
SEMINI C, TSAGARAKIS N G, GUGLIELMINO E, et al Design of HyQ: a hydraulically and electrically actuated quadruped robot[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2011, 225 (6): 831- 849
doi: 10.1177/0959651811402275
|
|
|
| [16] |
BELLEGARDA G, CHEN Y, LIU Z, et al. Robust high-speed running for quadruped robots via deep reinforcement learning [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyoto: IEEE, 2022: 10364-10370.
|
|
|
| [17] |
FERREIRA J, MOREIRA A P, SILVA M, et al. A survey on localization, mapping, and trajectory planning for quadruped robots in vineyards [C]//IEEE International Conference on Autonomous Robot Systems and Competitions. Santa Maria da Feira: IEEE, 2022: 237-242.
|
|
|
| [18] |
MURPHY M P, SAUNDERS A, MOREIRA C, et al The littledog robot[J]. The International Journal of Robotics Research, 2011, 30 (2): 145- 149
doi: 10.1177/0278364910387457
|
|
|
| [19] |
YANG C, YUAN K, ZHU Q, et al Multi-expert learning of adaptive legged locomotion[J]. Science Robotics, 2020, 5 (49): eabb2174
doi: 10.1126/scirobotics.abb2174
|
|
|
| [20] |
LIN J, DENG G, CHEN L, et al. Bionic architecture design and robust rough-terrain locomotion for a high-payload quadrupedal robot [C]//IEEE International Conference on Robotics and Biomimetics. Dali: IEEE, 2019: 1027-1034.
|
|
|
| [21] |
GOLDMAN D, KOMSUOGLU H, KODITSCHEK D March of the sandbots[J]. IEEE Spectrum, 2009, 46 (4): 30- 35
doi: 10.1109/MSPEC.2009.4808384
|
|
|
| [22] |
HIROSE S, KATO K. Study on quadruped walking robot in Tokyo Institute of Technology-past, present and future [C]//IEEE International Conference on Robotics and Automation. San Francisco: IEEE, 2000: 414-419.
|
|
|
| [23] |
ALTENDORFER R, MOORE N, KOMSUOGLU H, et al Rhex: a biologically inspired hexapod runner[J]. Autonomous Robots, 2001, 11 (3): 207- 213
doi: 10.1023/A:1012426720699
|
|
|
| [24] |
MICHAUD F, LETOURNEAU D, ARSENAULT M, et al Multi-modal locomotion robotic platform using leg-track-wheel articulations[J]. Autonomous Robots, 2005, 18 (2): 137- 156
doi: 10.1007/s10514-005-0722-1
|
|
|
| [25] |
SANCHEZ C J, CHIU C W, ZHOU Y, et al Locomotion control of hybrid cockroach robots[J]. Journal of the Royal Society Interface, 2015, 12 (105): 20141363
doi: 10.1098/rsif.2014.1363
|
|
|
| [26] |
LUNECKAS M, LUNECKAS T, UDRIS D, et al A hybrid tactile sensor-based obstacle overcoming method for hexapod walking robots[J]. Intelligent Service Robotics, 2021, 14: 9- 24
|
|
|
| [27] |
DA X, XIE Z, HOELLER D, et al. Learning a contact-adaptive controller for robust, efficient legged locomotion [C]//Conference on Robot Learning. Cambridge: PMLR, 2021: 883-894.
|
|
|
| [28] |
JI Q, FU S, TAN K, et al Synthesizing the optimal gait of a quadruped robot with soft actuators using deep reinforcement learning[J]. Robotics and Computer-Integrated Manufacturing, 2022, 78: 102382
doi: 10.1016/j.rcim.2022.102382
|
|
|
| [29] |
MURALIDHARAN S T, ZHU R, JI Q, et al. A soft quadruped robot enabled by continuum actuators [C]//IEEE 17th International Conference on Automation Science and Engineering. Lyon: IEEE, 2021: 834-840.
|
|
|
| [30] |
PARK I W, KIM J Y, LEE J, et al Mechanical design of the humanoid robot platform, HUBO[J]. Advanced Robotics, 2007, 21 (11): 1305- 1322
doi: 10.1163/156855307781503781
|
|
|
| [31] |
PARK I W, KIM J Y, LEE J, et al. Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot 3: HUBO) [C]//5th IEEE-RAS International Conference on Humanoid Robots. Tsukuba: IEEE, 2005: 321-326.
|
|
|
| [32] |
NIKONOVAS A, HARRISON A J L, HOULT S, et al The application of force-sensing resistor sensors for measuring forces developed by the human hand[J]. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 2004, 218 (2): 121- 126
doi: 10.1243/095441104322984013
|
|
|
| [33] |
HOEPFLINGER M A, REMY C D, HUTTER M, et al. Haptic terrain classification for legged robots [C]//IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 2828-2833.
|
|
|
| [34] |
WU X A, HUH T M, MUKHERJEE R, et al Integrated ground reaction force sensing and terrain classification for small legged robots[J]. IEEE Robotics and Automation Letters, 2016, 1 (2): 1125- 1132
doi: 10.1109/LRA.2016.2524073
|
|
|
| [35] |
HUTTER M. StarlETH & Co. : design and control of legged robots with compliant actuation [D]. Zurich: Swiss Federal Institute of Technology Zurich, 2013.
|
|
|
| [36] |
CHUAH M Y, KIM S Enabling force sensing during ground locomotion: a bio-inspired, multi-axis, composite force sensor using discrete pressure mapping[J]. IEEE Sensors Journal, 2014, 14 (5): 1693- 1703
doi: 10.1109/JSEN.2014.2299805
|
|
|
| [37] |
TOMO T P, SOMLOR S, SCHMITZ A, et al Design and characterization of a three-axis hall effect-based soft skin sensor[J]. Sensors, 2016, 16 (4): 491
doi: 10.3390/s16040491
|
|
|
| [38] |
KOCO E, MIRKOVIC D, KOVACIC Z Hybrid compliance control for locomotion of electrically actuated quadruped robot[J]. Journal of Intelligent and Robotic Systems, 2019, 94 (3): 537- 563
|
|
|
| [39] |
YUAN W, DONG S, ADELSON E H Gelsight: high-resolution robot tactile sensors for estimating geometry and force[J]. Sensors, 2017, 17 (12): 2762
doi: 10.3390/s17122762
|
|
|
| [40] |
TENZER Y, JENTOFT L P, HOWE R D The feel of MEMS barometers: inexpensive and easily customized tactile array sensors[J]. IEEE Robotics and Automation Magazine, 2014, 21 (3): 89- 95
doi: 10.1109/MRA.2014.2310152
|
|
|
| [41] |
GUGGENHEIM J W, JENTOFT L P, TENZER Y, et al Robust and inexpensive six-axis force–torque sensors using MEMS barometers[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22 (2): 838- 844
doi: 10.1109/TMECH.2017.2654446
|
|
|
| [42] |
ZU L, WEN J, WANG S, et al Multiangle, self-powered sensor array for monitoring head impacts[J]. Science Advances, 2023, 9 (20): 5152
doi: 10.1126/sciadv.adg5152
|
|
|
| [43] |
TALEBI S, POULAKAKIS I, PAPADOPOULOS E, et al. Quadruped robot running with a bounding gait [C]//Experimental Robotics VII. Hawaii: [s. n. ], 2001: 281-289.
|
|
|
| [44] |
NAM H, XU Q, HONG D. A reliable low-cost foot contact sensor for legged robots [C]//2020 17th International Conference on Ubiquitous Robots. Kyoto: IEEE, 2020: 219-224.
|
|
|
| [45] |
BLOESCH M, GEHRING C, FANKHAUSER P, et al. State estimation for legged robots on unstable and slippery terrain [C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013: 6058-6064.
|
|
|
| [46] |
FALLON M F, ANTONE M, ROY N, et al. Drift-free humanoid state estimation fusing kinematic, inertial and lidar sensing [C]//IEEE-RAS International Conference on Humanoid Robots. Madrid: IEEE, 2014: 112-119.
|
|
|
| [47] |
ROTELLA N, SCHAAL S, RIGHETTI L. Unsupervised contact learning for humanoid estimation and control [C]//IEEE International Conference on Robotics and Automation. Brisbane: IEEE, 2018: 411-417.
|
|
|
| [48] |
PIPERAKIS S, KOSKINOPOULOU M, TRAHANIAS P Nonlinear state estimation for humanoid robot walking[J]. IEEE Robotics and Automation Letters, 2018, 3 (4): 3347- 3354
doi: 10.1109/LRA.2018.2852788
|
|
|
| [49] |
WANG R, ZHAO J, WANG J. Torque compensation model and touchdown detection model of the hydraulic quadruped robot controlled by VMC [C]//34th Chinese Control and Decision Conference. Hefei: IEEE, 2022: 3937-3943.
|
|
|
| [50] |
ORTENZI V, LIN H C, AZAD M, et al. Kinematics-based estimation of contact constraints using only proprioception [C]//2016 IEEE-RAS 16th International Conference on Humanoid Robots. Cancun: IEEE, 2016: 1304-1311.
|
|
|
| [51] |
BLOESCH M, HUTTER M, HOEPFLINGER M A, et al State estimation for legged robots-consistent fusion of leg kinematics and IMU[J]. Robotics, 2013, 17: 17- 24
|
|
|
| [52] |
HARTLEY R, GHAFFARI M, EUSTICE R M, et al Contact-aided invariant extended Kalman filtering for robot state estimation[J]. The International Journal of Robotics Research, 2020, 39 (4): 402- 430
doi: 10.1177/0278364919894385
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|