|
|
|
| Swarm intelligence optimization of linear active disturbance rejection controller for steer-by-wire system |
Xuan WEI1,2( ),He HUANG1,2,*(),Lan YANG3,Huifeng WANG1,Tao GAO3 ),He HUANG1,2,*(),Lan YANG3,Huifeng WANG1,Tao GAO3 |
1. School of Electronic and Control Engineering, Chang'an University, Xi’an 710064, China
2. Key Laboratory of Intelligent Expressway Information Fusion and Control, Chang’an University, Xi’an 710064, China
3. School of Information Engineering, Chang’an University, Xi’an 710064, China |
|
|
|
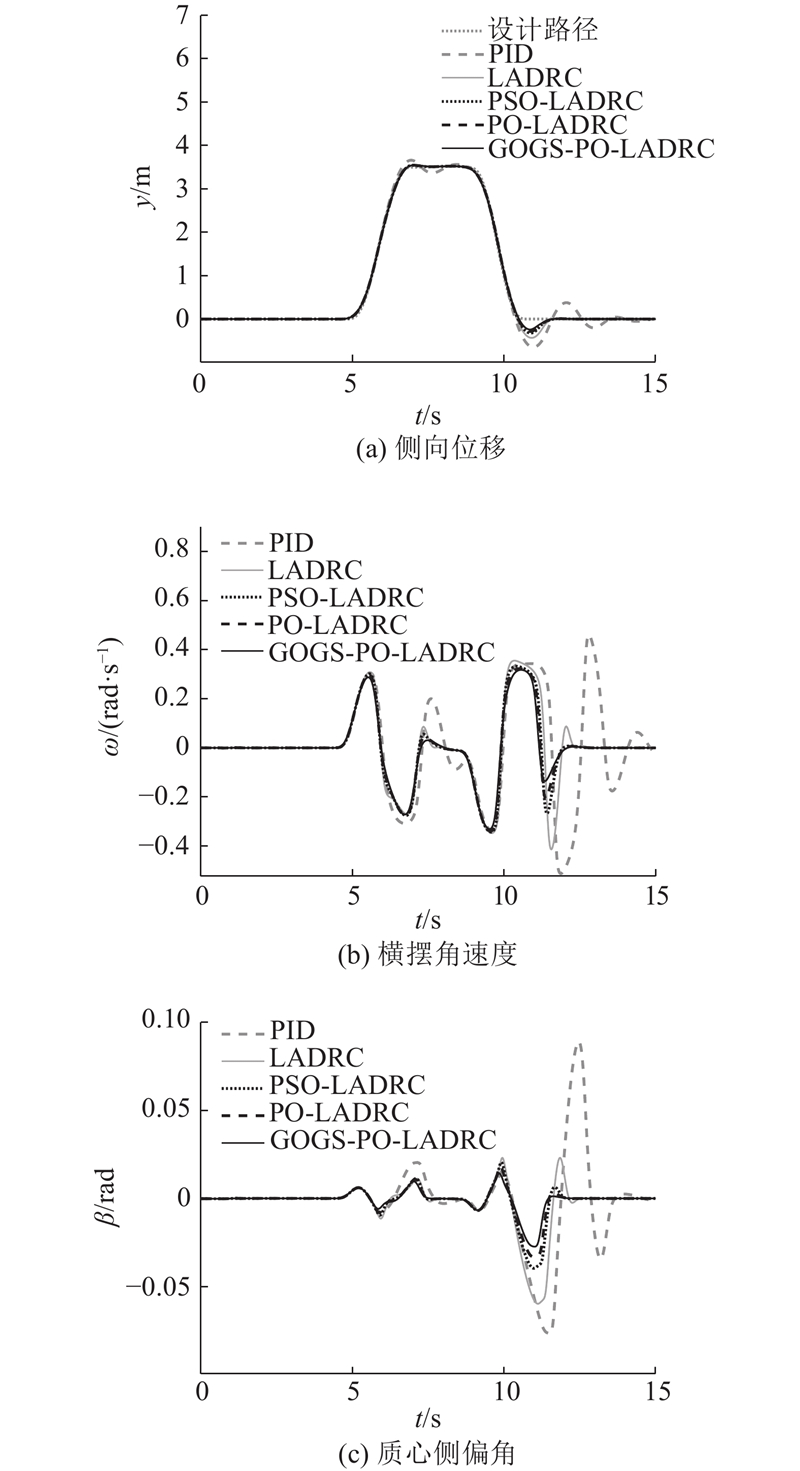
Abstract A linear active disturbance rejection controller (LADRC) method based on a multi-strategy enhanced parrot optimization (GOGS-PO) algorithm was proposed in order to address the issues of poor adaptability and difficult parameter tuning of the LADRC in steer-by-wire system. A simulation model of vehicle steer-by-wire system utilizing LADRC was established. The performance of the parrot swarm intelligence algorithm was enhanced through four improvement strategies. A mated-pair initialization strategy was designed to improve population distribution uniformity and enhance global exploration capability. A dynamic residence factor was introduced to optimize staying behavior and avoid local optima. The golden sine algorithm was used to refine the fear-of-strangers behavior. The leader mechanism of the salp swarm algorithm was integrated to accelerate convergence. Validation using test functions shows that GOGS-PO outperforms comparative algorithms in both convergence speed and accuracy. The LADRC parameters were optimized by using GOGS-PO in order to improve control performance. Simulation experiments showed that the GOGS-PO-based LADRC method reduced front wheel steering angle tracking error, yaw rate, and peak sideslip angle under complex conditions compared with traditional methods, achieving front wheel steering angle tracking accuracy on the order of 0.02°. Statistical significance tests confirmed that the GOGS-PO-LADRC control strategy ranked first across all evaluation metrics with significant advantage, demonstrating that the method enhanced vehicle handling stability and dynamic response performance.
|
|
Received: 09 April 2025
Published: 04 February 2026
|
|
|
| Fund: 国家自然科学基金资助项目(52572353);中央高校基本科研业务费资助项目(300102325501);中国交通教育研究会教育科研课题资助项目(JT2024YB444). |
|
Corresponding Authors:
He HUANG
E-mail: 2113304060@qq.com;huanghe@chd.edu.cn
|
线控转向系统线性自抗扰控制器的群智能优化
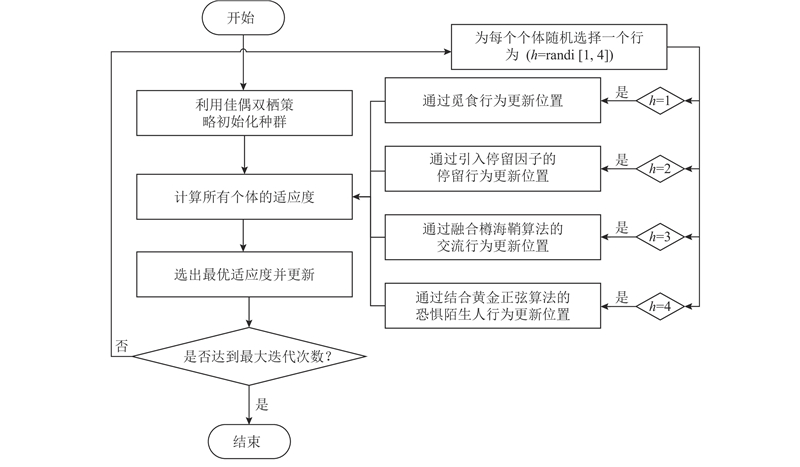
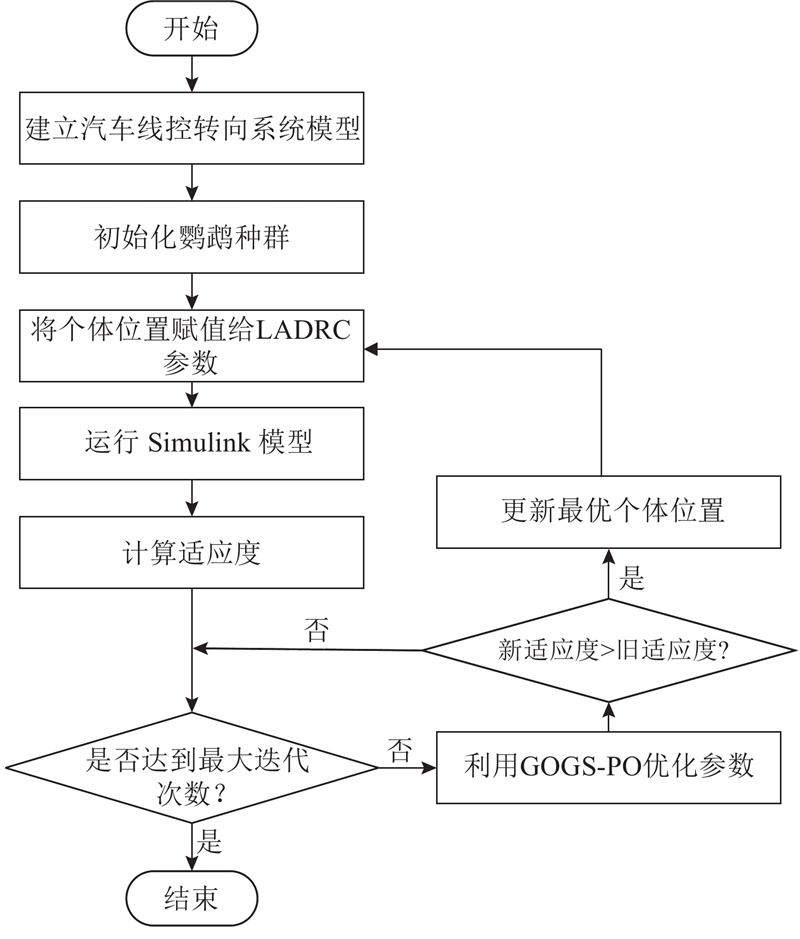
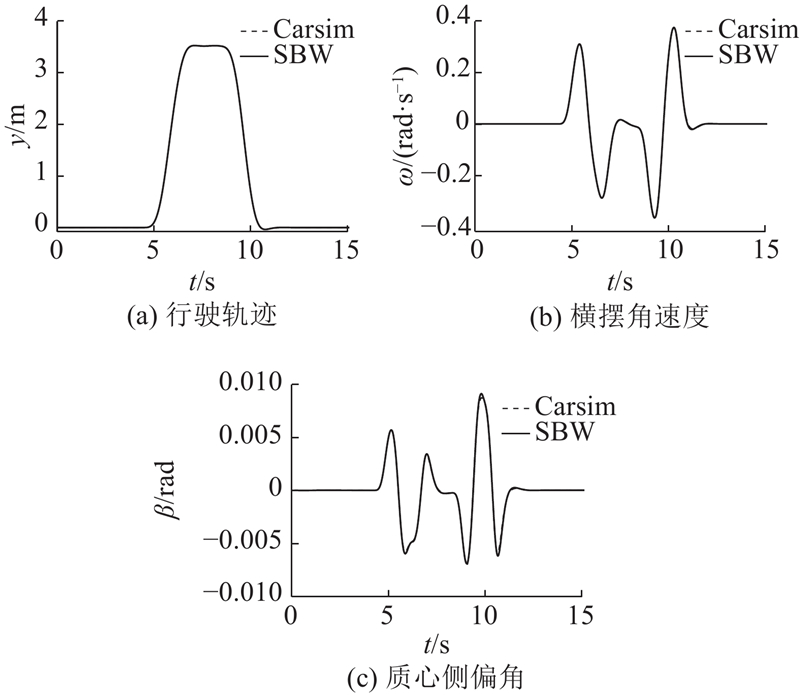
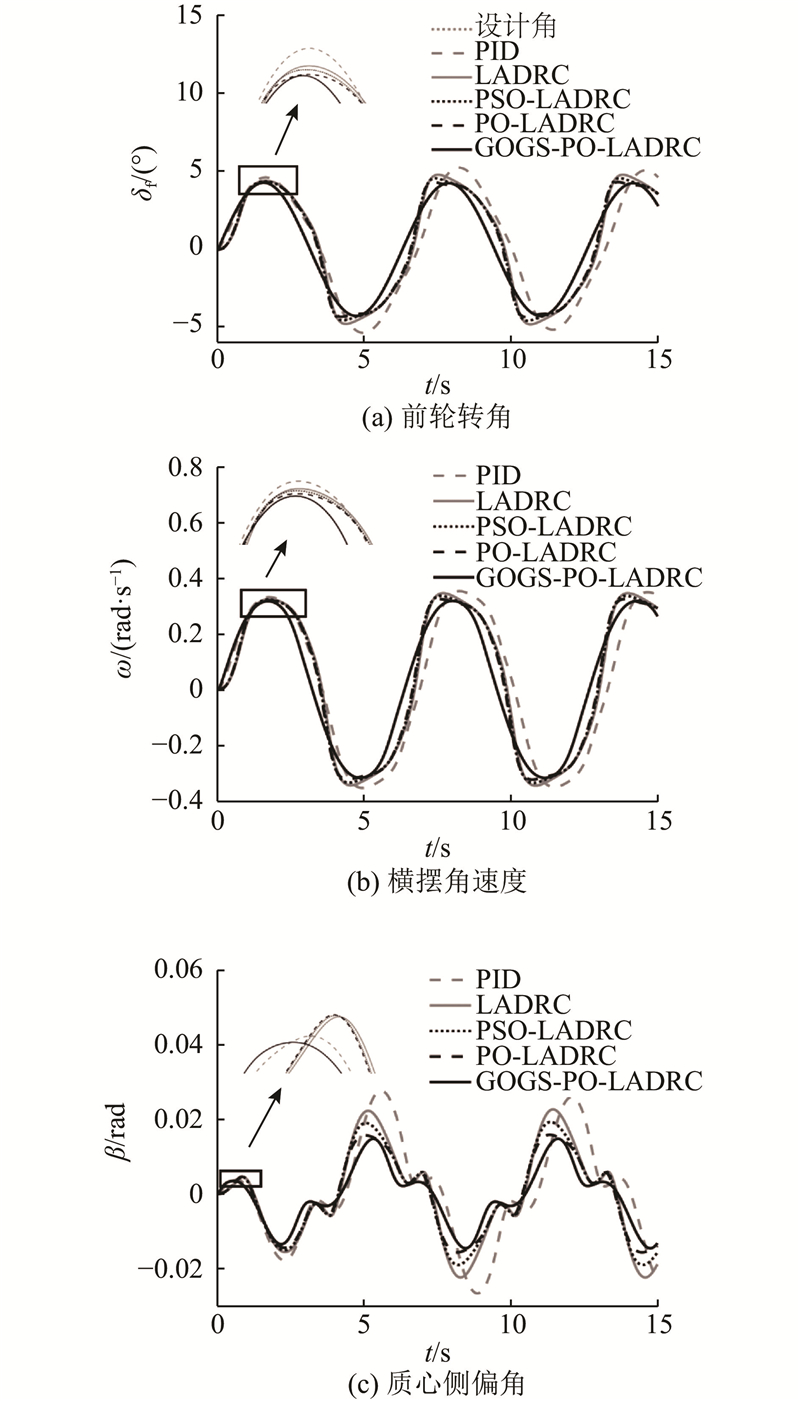
针对线控转向系统中线性自抗扰控制器(LADRC)适应性差、参数调整困难的问题,提出基于多策略鹦鹉优化算法(GOGS-PO)的LADRC控制方法. 建立基于LADRC的汽车线控转向系统仿真模型. 通过4项改进策略,提升鹦鹉群智能算法的性能. 设计佳偶双栖初始化策略,提升种群分布的均匀性,增强全局探索能力. 引入动态停留因子,优化停留行为,避免局部最优. 采用黄金正弦算法,优化恐惧陌生人的行为. 融合樽海鞘优化算法的领导者机制,加速收敛. 测试函数的验证表明,GOGS-PO在收敛速度和精度上均优于对比算法. 利用GOGS-PO优化LADRC参数,提升控制性能. 仿真实验表明,在复杂工况下,基于GOGS-PO的LADRC方法相较于传统方法,前轮转角跟踪误差、横摆角速度和质心侧偏角峰值均降低,前轮转角的跟踪精度达到0.02°量级. 在统计显著性测试中,GOGS-PO-LADRC控制策略在所有的评价指标中均排名第一,具有显著性优势,证实该方法提升了车辆的操纵稳定性和动态响应性能.
关键词:
线控转向(SBW),
线性自抗扰控制器(LADRC),
鹦鹉算法,
参数整定,
路面附着系数
|
|
| [1] |
LIN J, ZHANG F, SU L, et al Research on variable transmission ratio control method to improve vehicle handling comfort based on steer-by-wire system[J]. Actuators, 2024, 13 (2): 48
doi: 10.3390/act13020048
|
|
|
| [2] |
HUANG C, LI L, WANG X Comparative study of two types of control loops aiming at trajectory tracking of a steer-by-wire system with Coulomb friction[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235 (1): 16- 31
doi: 10.1177/0954407020946972
|
|
|
| [3] |
MENG L, SUN C Automatic control method of automobile steering-by-wire based on fuzzy PID[J]. International Journal of Vehicle Information and Communication Systems, 2023, 8 (1/2): 1- 15
doi: 10.1504/IJVICS.2023.131596
|
|
|
| [4] |
JIN K, XIAO P, YANG D, et al Research on steering-by-wire system motor control based on an improved sparrow search proportional–integral–derivative algorithm[J]. Electronics, 2024, 13 (22): 4553
doi: 10.3390/electronics13224553
|
|
|
| [5] |
LI Y R, HUANG J M, HE Z M. A nonlinear control method of steering angle following used in steer-by-wire system [J]. Applied Mechanics and Materials, 2012, 190/191: 890–893.
|
|
|
| [6] |
ZHAO L, CAO Q, HU Y, et al Stability control of steer by wire system based on improved ADRC[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236 (10/11): 2283- 2293
|
|
|
| [7] |
夏亮, 孙天夫, 李鑫宇, 等 基于线性自抗扰控制技术的伺服控制系统研究[J]. 电气工程学报, 2023, 18 (4): 43- 49
XIA Liang, SUN Tianfu, LI Xinyu, et al Research on servo control system based on linear active disturbance rejection control technology[J]. Journal of Electrical Engineering, 2023, 18 (4): 43- 49
doi: 10.11985/2023.04.005
|
|
|
| [8] |
HAN D, LI C, SHI Z Attitude autopilot design based on fuzzy linear active disturbance rejection control[J]. Aerospace, 2022, 9 (8): 429
doi: 10.3390/aerospace9080429
|
|
|
| [9] |
XU J, GUO Y, LIU F, et al Development and experiment of semi-physical simulation platform for space manipulator[J]. Sensors, 2024, 24 (13): 4354
doi: 10.3390/s24134354
|
|
|
| [10] |
LIAN J, HUI G, MA L, et al Parrot optimizer: algorithm and applications to medical problems[J]. Computers in Biology and Medicine, 2024, 172: 108064
doi: 10.1016/j.compbiomed.2024.108064
|
|
|
| [11] |
MIRJALILI S, GANDOMI A H, MIRJALILI S Z, et al Salp swarm algorithm: a bio-inspired optimizer for engineering design problems[J]. Advances in Engineering Software, 2017, 114: 163- 191
doi: 10.1016/j.advengsoft.2017.07.002
|
|
|
| [12] |
刘书翰, 吴晓东, 梁登宇, 等 基于转速参考模型的线控转向主动回正控制[J]. 汽车工程学报, 2025, 15 (1): 108- 115
LIU Shuhan, WU Xiaodong, LIANG Dengyu, et al Active return-to-center control for steer-by-wire systems based on a steering wheel angular speed reference model[J]. Chinese Journal of Automotive Engineering, 2025, 15 (1): 108- 115
doi: 10.3969/j.issn.2095-1469.2025.01.11
|
|
|
| [13] |
孙有平, 李崧, 何江美, 等 汽车线控转向系统稳定性控制策略研究[J]. 重庆理工大学学报: 自然科学, 2024, (7): 37- 43
SUN Youping, LI Song, HE Jiangmei, et al Research on the stability control strategy of vehicle steer-by-wire system[J]. Journal of Chongqing University of Technology: Natural Science, 2024, (7): 37- 43
|
|
|
| [14] |
HEINRICH F, KASTE J, KABIL S G, et al Methods for modeling the steering wheel torque of a steer-by-wire vehicle[J]. Automotive and Engine Technology, 2022, 7 (1): 53- 64
|
|
|
| [15] |
LUO S, ZHANG B, MA J, et al Research on a hierarchical control strategy for anti-lock braking systems based on active disturbance rejection control (ADRC)[J]. Applied Sciences, 2025, 15 (3): 1294
doi: 10.3390/app15031294
|
|
|
| [16] |
LU Z An adaptive dung beetle optimization algorithm with golden sine for optimizing numerical unconstrained problems[J]. Current Journal of Applied Science and Technology, 2024, 43 (4): 12- 20
doi: 10.9734/cjast/2024/v43i44365
|
|
|
| [17] |
XUE J, SHEN B Dung beetle optimizer: a new meta-heuristic algorithm for global optimization[J]. The Journal of Supercomputing, 2023, 79 (7): 7305- 7336
doi: 10.1007/s11227-022-04959-6
|
|
|
| [18] |
YUAN C, ZHAO D, HEIDARI A A, et al Polar lights optimizer: algorithm and applications in image segmentation and feature selection[J]. Neurocomputing, 2024, 607: 128427
doi: 10.1016/j.neucom.2024.128427
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|