|
|
|
| Frequency-domain tuning method for linear active disturbance rejection control parameters of electro-hydraulic servo systems |
Gang YANG( ),Yue PAN,Zhaozhuo WANG,Yue XU,Baoren LI ),Yue PAN,Zhaozhuo WANG,Yue XU,Baoren LI |
| School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan 430074, China |
|
|
|
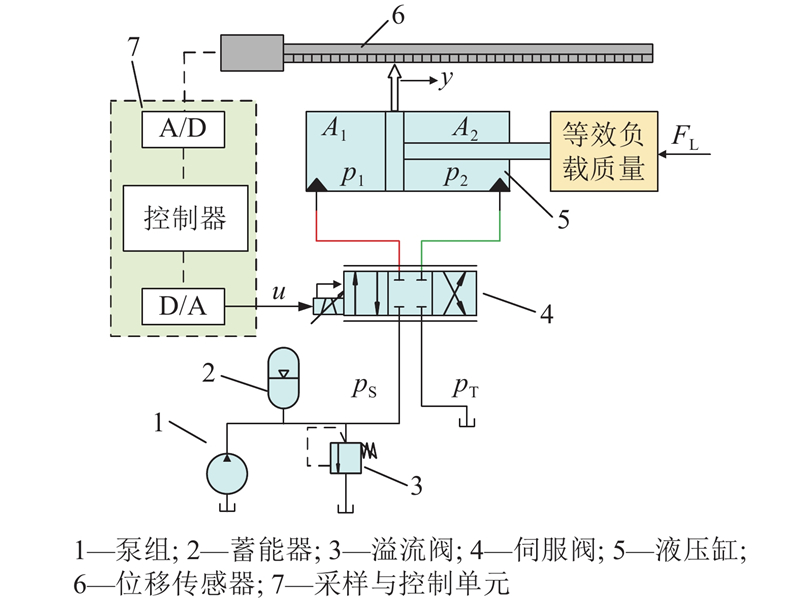
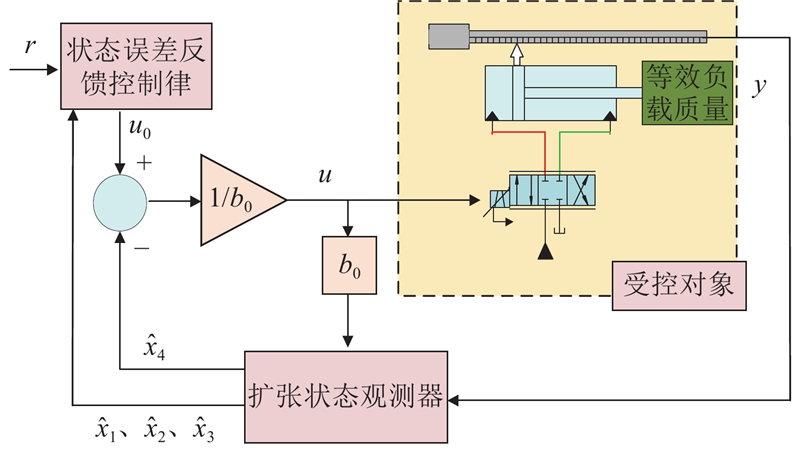
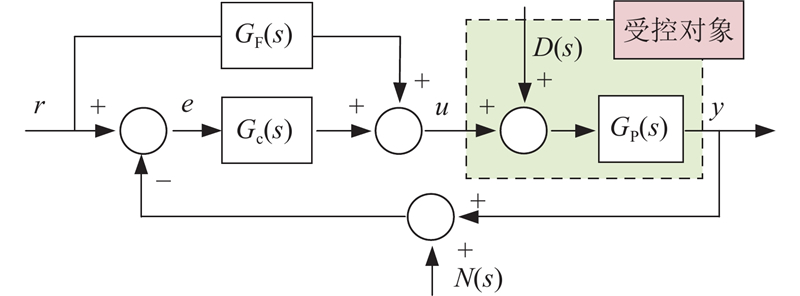
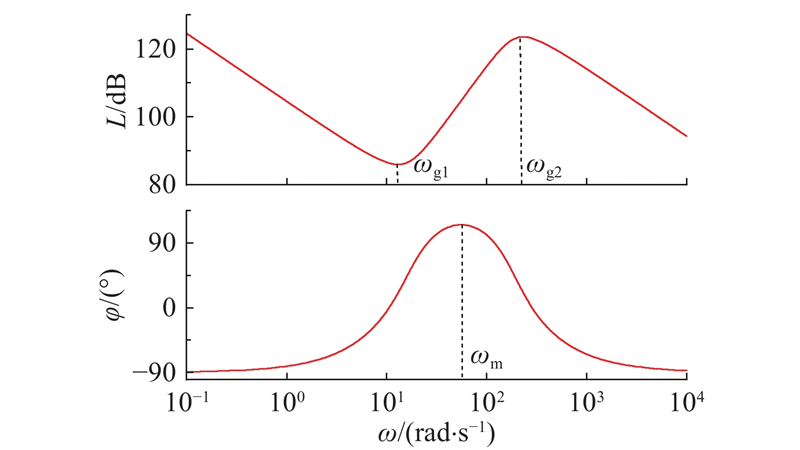
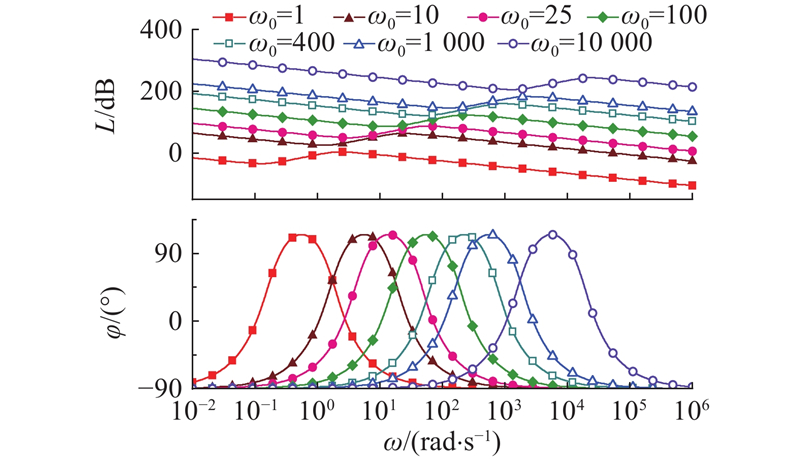
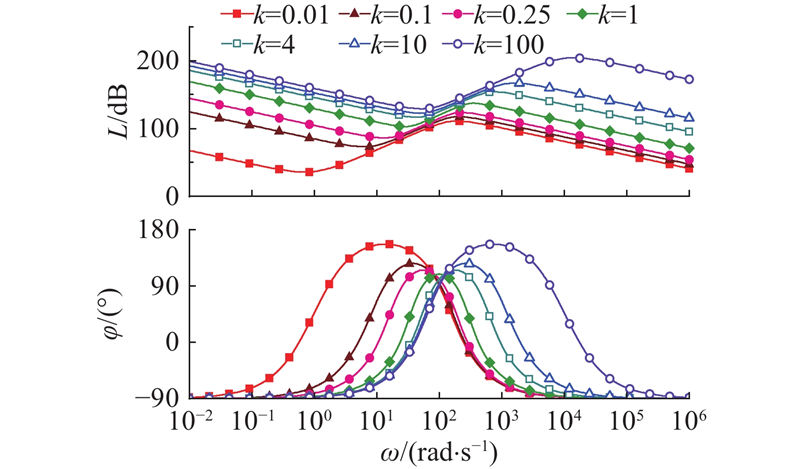
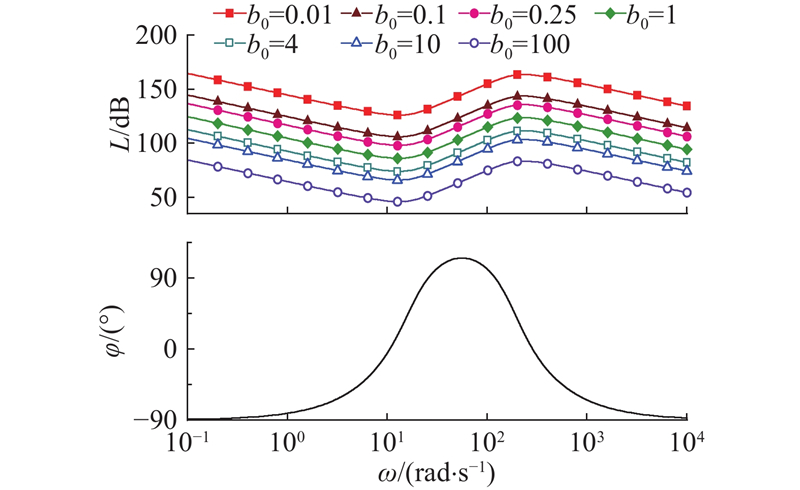
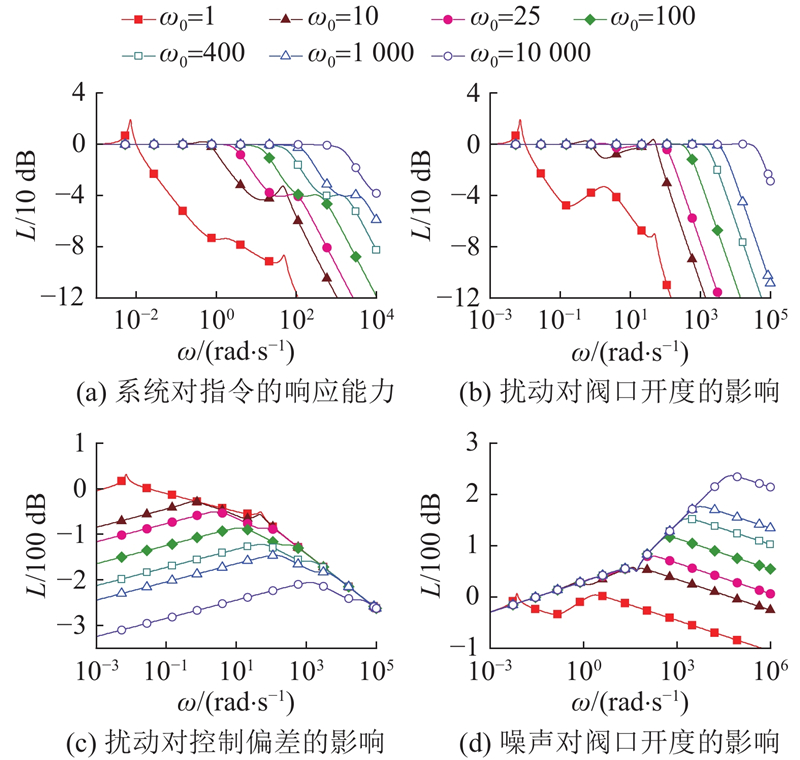
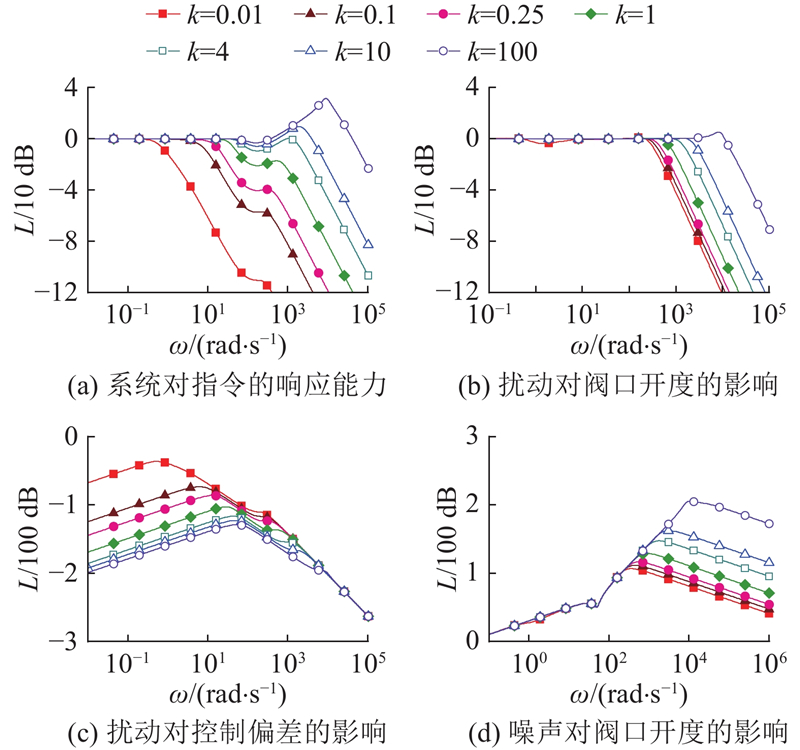
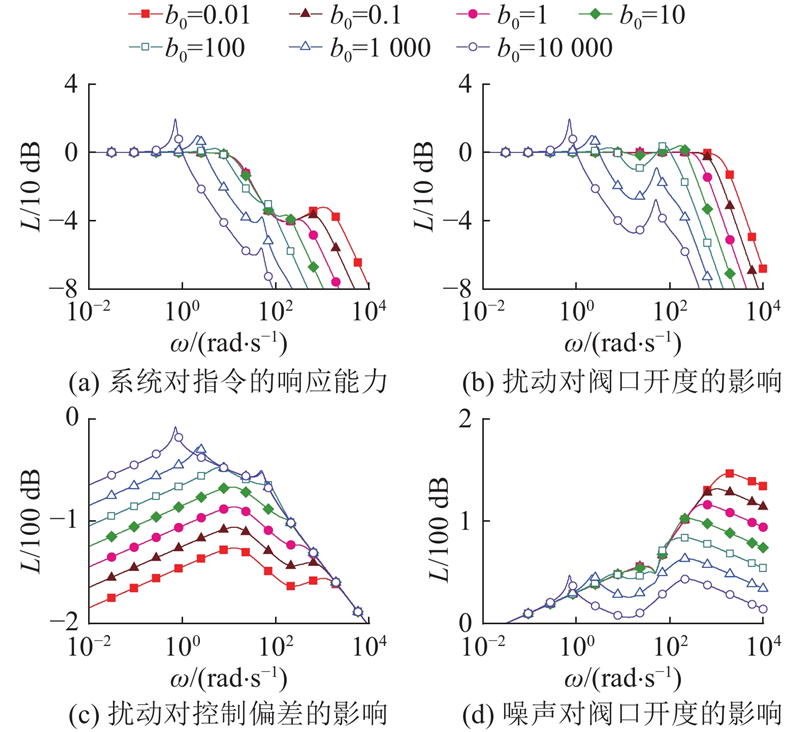
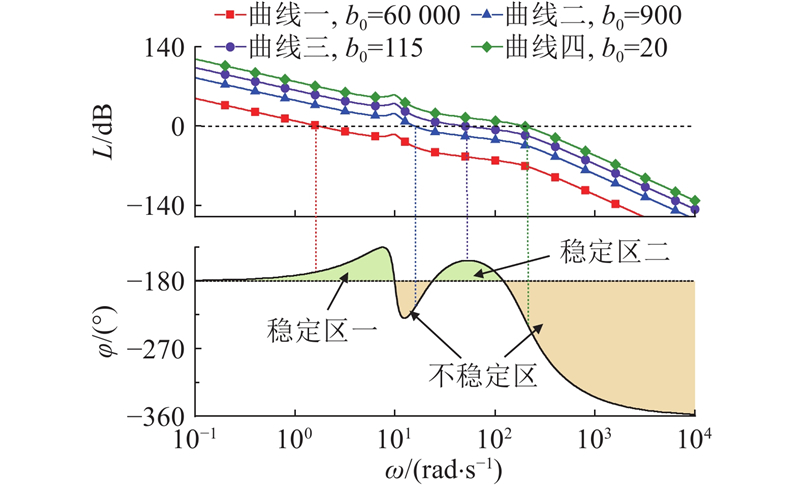
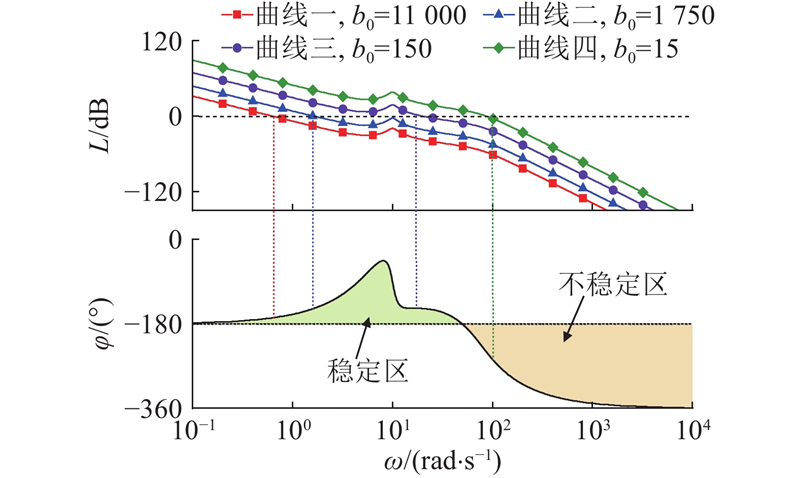
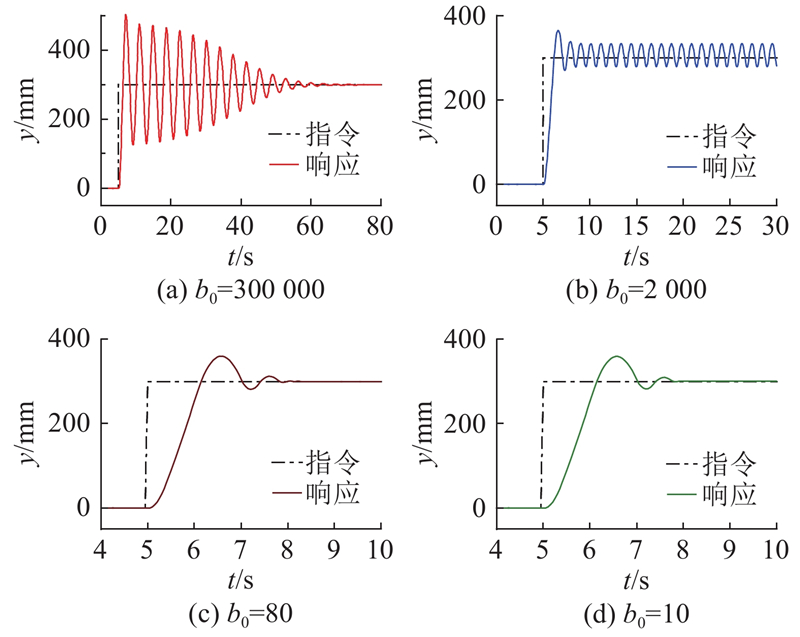
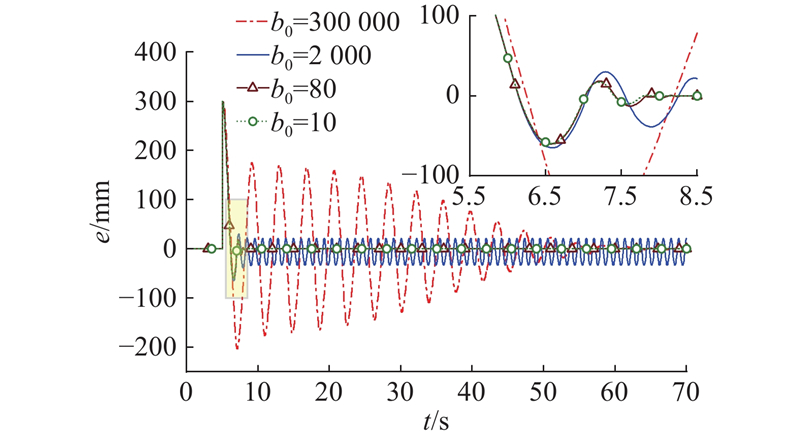
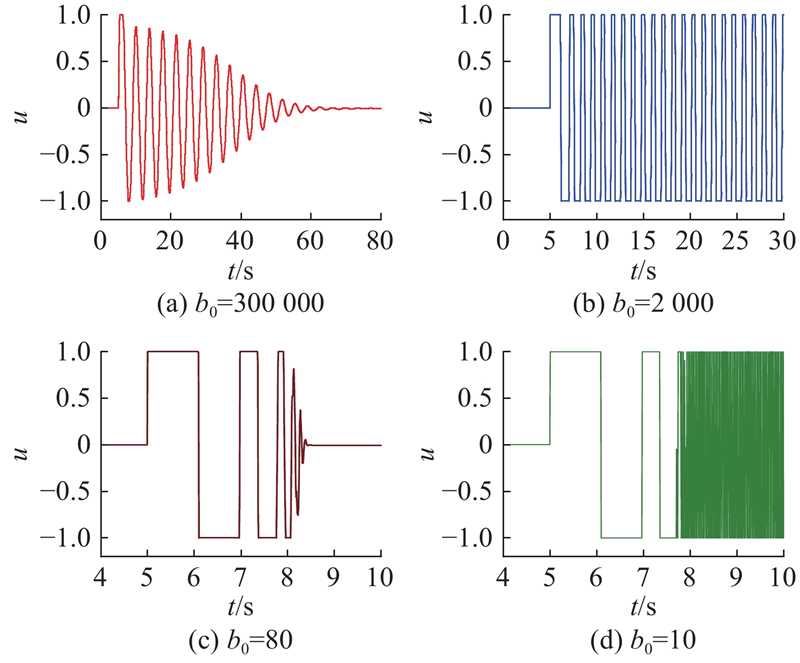
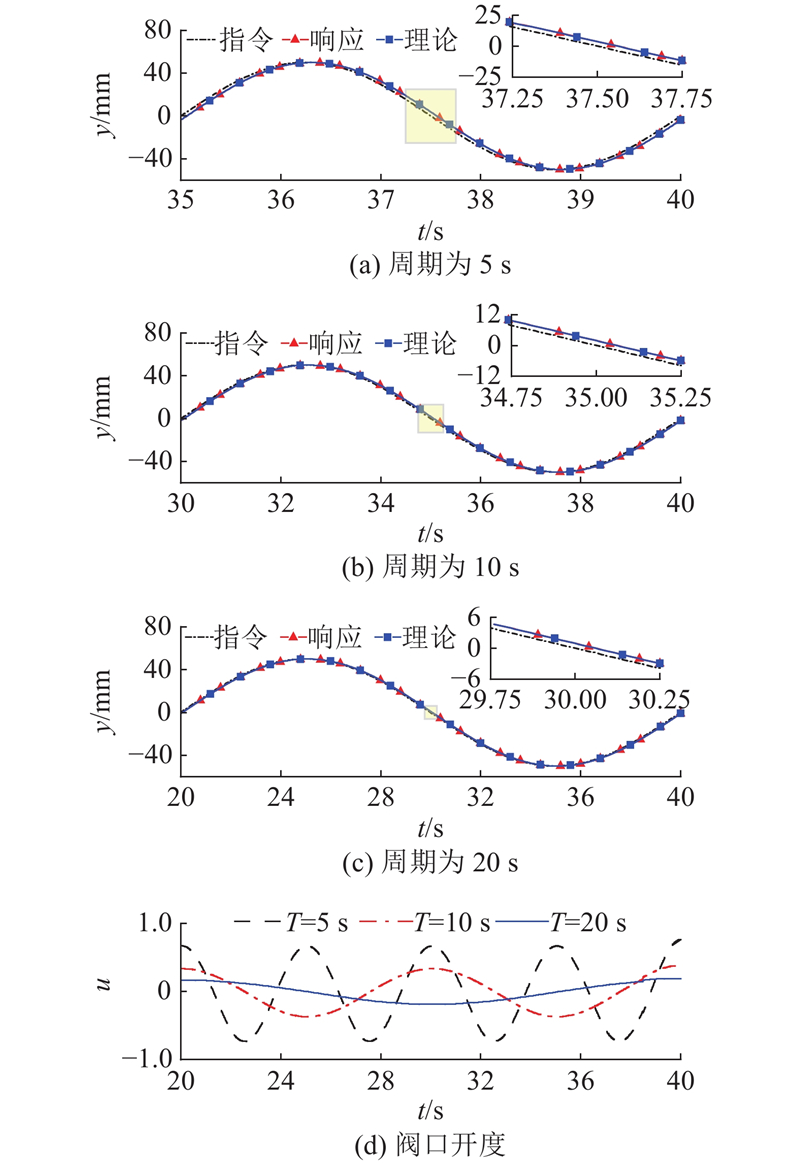
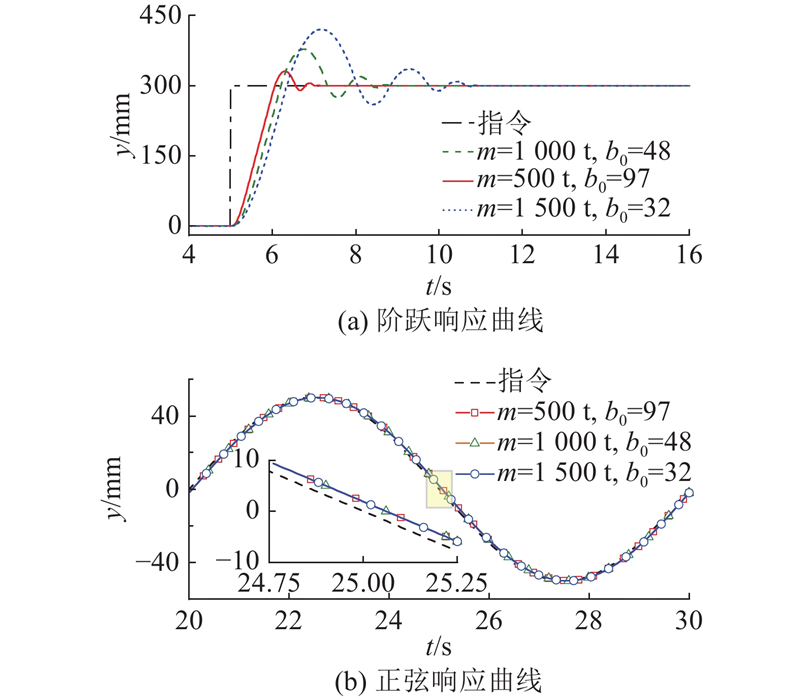
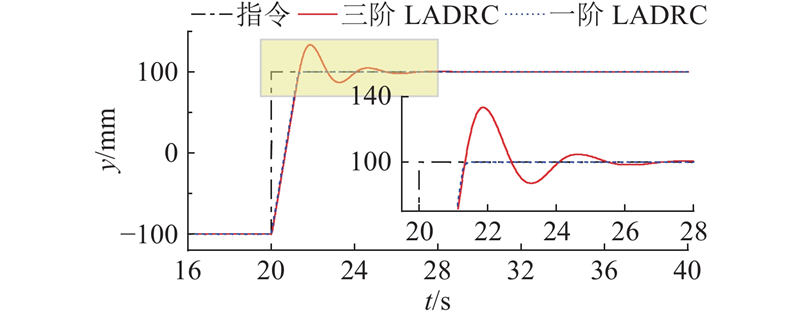
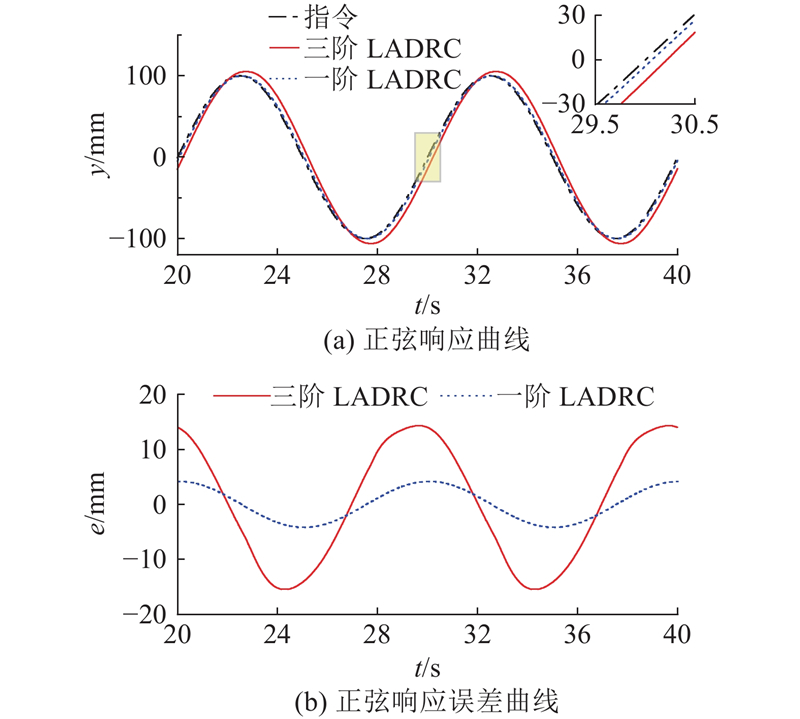
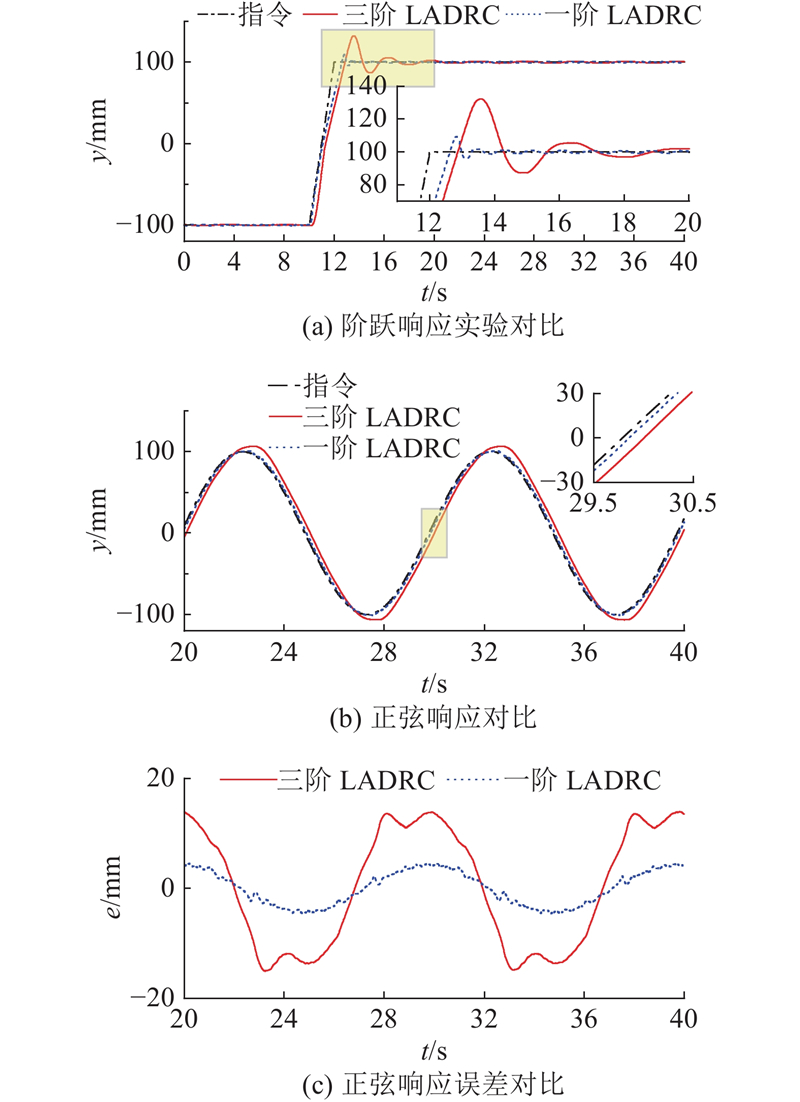
Abstract To resolve the challenges associated with parameter tuning in linear active disturbance rejection control (LADRC) for electro-hydraulic servo systems, the frequency-domain equivalent model of LADRC was derived and analyzed. The system correction mechanism of LADRC was examined from a frequency-domain perspective, and the influences of parameters on the closed-loop performance of electro-hydraulic servo systems were systematically investigated. The system correction capability and order selection of LADRC under varying hydraulic natural frequency conditions were discussed. A parameter matching design method for LADRC was developed based on the Bode stability criterion. Simulation and experimental results demonstrate that the proposed parameter matching design method ensures the stability of closed-loop systems. For systems with lower hydraulic natural frequencies, the third-order LADRC controller is shown to effectively expand the response bandwidth and accelerate the response speed. Conversely, for systems with higher hydraulic natural frequencies, the first-order LADRC achieves superior control performance compared to the third-order LADRC. Under experimental conditions, the first-order LADRC reduces the step response overshoot by 71.25%, shortens the settling time by 61.79%, and decreases the dynamic tracking root-mean-square error by 71.29% relative to the third-order LADRC.
|
|
Received: 28 December 2024
Published: 27 October 2025
|
|
|
| Fund: 基础加强计划重点基础研究项目(2021-173ZD-029). |
电液伺服系统线性自抗扰控制参数频域整定方法
针对电液伺服系统线性自抗扰控制(LADRC)参数难以整定的问题,推导并分析LADRC的频域等效模型;从频域角度分析LADRC的系统矫正机理,研究各参数对电液伺服系统闭环性能的影响;讨论在不同液压固有频率工况下LADRC的系统校正能力和阶数选取,基于伯德稳定判据提出LADRC的参数匹配设计方法. 仿真与实验结果表明,所提参数匹配设计方法能够使闭环系统稳定. 对于液压固有频率较低的系统,三阶LADRC控制器能够有效增大响应带宽,提高响应速度;对于液压固有频率较高的系统,一阶LADRC较三阶LADRC具有更好的控制效果. 在实验条件下,一阶LADRC的阶跃响应超调、调节时间以及动态跟踪均方根误差较三阶LADRC分别减少了71.25%、61.79%和71.29%.
关键词:
电液伺服系统,
线性自抗扰控制(LADRC),
参数整定,
频域分析,
稳定性分析
|
|
| [11] |
ZANG Wanshun, SHEN Gang, ZHAO Jun, et al Extended sliding mode observer-based robust tracking control scheme for electro-hydraulic servo systems[J]. Journal of Zhejiang University: Engineering Science, 2024, 58 (3): 611- 621
|
|
|
| [12] |
韩京清 自抗扰控制技术[J]. 前沿科学, 2007, 1 (1): 24- 31
HAN Jingqing Auto disturbances rejection control technique[J]. Frontier Science, 2007, 1 (1): 24- 31
|
|
|
| [13] |
GAO Z. Scaling and bandwidth-parameterization based controller tuning [C]// Proceedings of the 2003 American Control Conference. Denver: IEEE, 2003: 4989–4996.
|
|
|
| [14] |
刘永伟, 陈学思, 王冉珺, 等. 改进的LADRC参数稳定域计算方法及应用[EB/OL]. (2024–09–10)[2024–12–28]. https://link.cnki.net/doi/10.14107/j.cnki.kzgc.20240284.
|
|
|
| [15] |
张彬文, 谭文, 李健 基于频域近似的线性系统自抗扰参数整定[J]. 控制理论与应用, 2019, 36 (5): 831- 840
ZHANG Binwen, TAN Wen, LI Jian Tuning of linear active disturbance rejection control via frequency domain approximation[J]. Control Theory and Applications, 2019, 36 (5): 831- 840
|
|
|
| [16] |
TIAN G, GAO Z. Frequency response analysis of active disturbance rejection based control system [C]// Proceedings of the IEEE International Conference on Control Applications. Singapore: IEEE, 2007: 1595–1599.
|
|
|
| [17] |
吕云嵩 阀控非对称缸频域建模[J]. 机械工程学报, 2007, 43 (9): 122- 126
LÜ Yunsong Modeling in frequency domain for valve controlled asymmetric hydraulic cylinders[J]. Chinese Journal of Mechanical Engineering, 2007, 43 (9): 122- 126
doi: 10.3901/JME.2007.09.122
|
|
|
| [18] |
袁朝辉, 董骥, 刘存颖, 等 阀控缸的非线性建模和分析[J]. 机床与液压, 2008, 36 (9): 249- 251
YUAN Zhaohui, DONG Ji, LIU Cunying, et al Valve control cylinder nonlinear modeling and analysis[J]. Machine Tool and Hydraulics, 2008, 36 (9): 249- 251
|
|
|
| [19] |
秦鹏帅. 电液伺服系统位置跟踪控制算法研究 [D]. 秦皇岛: 燕山大学, 2024.
|
|
|
| [1] |
赵鹏宇, 陈英龙, 周华 油液混合动力工程机械系统及控制策略研究综述[J]. 浙江大学学报: 工学版, 2016, 50 (3): 449- 459
ZHAO Pengyu, CHEN Yinglong, ZHOU Hua Overview of hydraulic hybrid engineering machinery system and control strategy[J]. Journal of Zhejiang University: Engineering Science, 2016, 50 (3): 449- 459
|
|
|
| [19] |
QIN Pengshuai. Research on position tracking control algorithm of electro-hydraulic servo system [D]. Qinhuangdao: Yanshan University, 2024.
|
|
|
| [20] |
ZHENG Q, GAO L Q, GAO Z On validation of extended state observer through analysis and experimentation[J]. Journal of Dynamic Systems, Measurement, and Control, 2012, 134 (2): 024505
doi: 10.1115/1.4005364
|
|
|
| [2] |
杨民强 盾构机液压系统研究进展综述[J]. 液压与气动, 2022, 46 (10): 170- 181
YANG Minqiang Review on research progress of related technologies of shield machine hydraulic system[J]. Chinese Hydraulics and Pneumatics, 2022, 46 (10): 170- 181
|
|
|
| [3] |
徐远志, 焦宗夏, 冯昊, 等 飞机液压刹车系统的自激振动分析与抑制[J]. 机械工程学报, 2024, 60 (16): 200- 208
XU Yuanzhi, JIAO Zongxia, FENG Hao, et al Analysis and suppression for self-excited vibration of aircraft hydraulic braking system[J]. Journal of Mechanical Engineering, 2024, 60 (16): 200- 208
|
|
|
| [4] |
王春行. 液压控制系统[M]. 北京: 机械工业出版社, 2004.
|
|
|
| [5] |
LI Z, XING K. Application of fuzzy PID controller for electro-hydraulic servo position control system [C]// Proceedings of the 3rd IEEE International Conference on Control Science and Systems Engineering. Beijing: IEEE, 2017: 158–162.
|
|
|
| [6] |
LI J, LI W, DU X Research on the characteristics of electro-hydraulic position servo system of RBF neural network under fuzzy rules[J]. Scientific Reports, 2024, 14: 15332
doi: 10.1038/s41598-024-64262-7
|
|
|
| [7] |
陈志高, 胡仕成, 黎新齐 基于模糊PID的变幅液压控制系统[J]. 液压与气动, 2021, 45 (6): 156- 162
CHEN Zhigao, HU Shicheng, LI Xinqi Variable amplitude hydraulic control system based on fuzzy PID[J]. Chinese Hydraulics and Pneumatics, 2021, 45 (6): 156- 162
|
|
|
| [8] |
焦宗夏, 姚建勇. 电液伺服系统非线性控制 [M]. 北京: 科学出版社, 2016.
|
|
|
| [9] |
郑靖重. 电液驱动俯仰机构非线性控制方法研究 [D]. 南京: 南京理工大学, 2019: 1–66.
ZHENG Jingchong. Study on nonlinear control method of electro-hydraulic drive pitch mechanism [D]. Nanjing: Nanjing University of Science and Technology, 2019.
|
|
|
| [10] |
魏建华, 孙春耕, 方锦辉, 等 复合材料成形液压机自适应鲁棒运动控制[J]. 浙江大学学报: 工学版, 2018, 52 (5): 925- 933
WEI Jianhua, SUN Chungeng, FANG Jinhui, et al Adaptive robust motion control of composite material hydraulic press[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (5): 925- 933
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|