|
|
|
| Multimodal trajectory prediction model integrating graph convolutional networks and social pooling |
Qinghui ZHAO1( ),Xin CUI1,*(),Yiwei ZHANG1,Yan CHEN1,2 ),Xin CUI1,*(),Yiwei ZHANG1,Yan CHEN1,2 |
1. School of Computer Science and Technology, Shandong University of Technology, Zibo 255049, China
2. College of Information Engineering, Xizang Vocational Technical College, Lhasa, 850000, China |
|
|
|
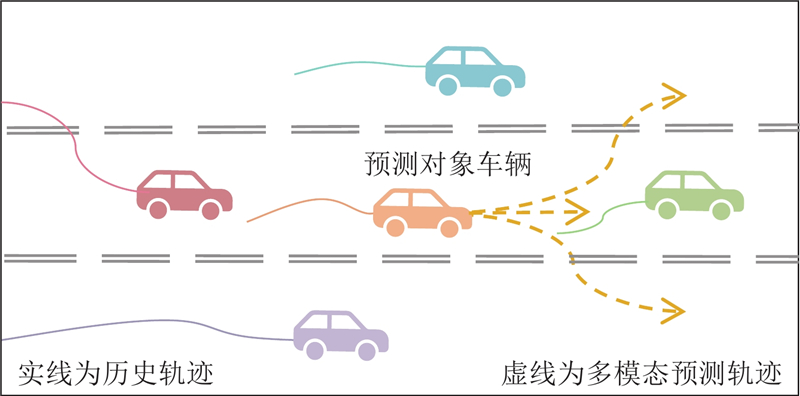
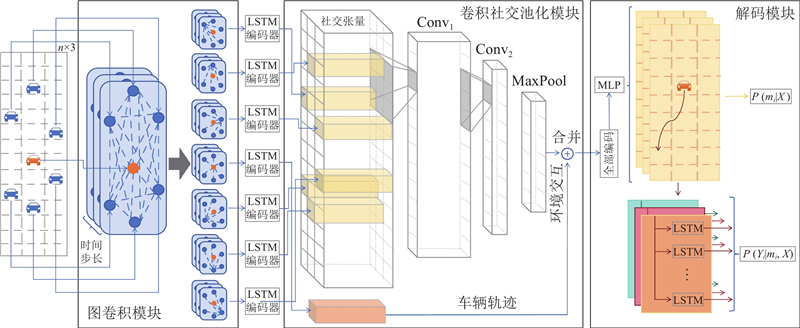
Abstract A multimodal trajectory prediction model was proposed for vehicle interaction behaviors in real traffic environments. Time series, spatial sequences, and social behavior were integrated for modeling and predicting future vehicle trajectories. Time-dependent features such as vehicle speed and acceleration were extracted from historical data using long short-term memory (LSTM). The interaction intensity between vehicles was quantified by graph convolutional networks (GCN) through a weighted adjacency matrix. A convolutional social pooling module was introduced to extract local interaction features and enhance hierarchical spatial interaction patterns. A multimodal prediction mechanism was adopted, where a multilayer perceptron (MLP) was used to compute the probability distribution of driving behaviors. The LSTM decoder was combined to generate future trajectory distributions corresponding to specific driving behaviors. Experimental results demonstrate that the proposed model achieves strong performance in vehicle trajectory prediction. Compared to baseline models, the root mean square error is reduced by 27.9% on average, and the negative log-likelihood is reduced by 56.45% on average.
|
|
Received: 09 June 2025
Published: 06 May 2026
|
|
|
| Fund: 科技博士项目(4041422007). |
|
Corresponding Authors:
Xin CUI
E-mail: sdutzhaoqinghui@163.com;cx@sdut.edu.cn
|
融合图卷积网络与社交池化的多模态轨迹预测模型
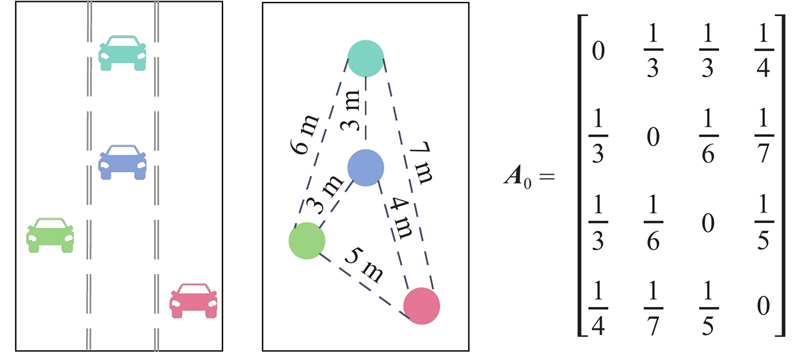
针对实际交通环境中车辆间的交互行为,提出多模态轨迹预测模型,结合时间序列、空间序列与社交行为建模,对车辆未来轨迹进行预测. 利用长短时记忆网络(LSTM)从历史数据中提取如车辆速度、加速度的时间依赖特征. 通过图卷积网络(GCN)利用加权邻接矩阵量化车辆间的交互强度,引入卷积社交池模块,提取车辆局部交互特征,提高层次空间交互模式. 采用多模态预测机制、多层感知机(MLP)计算驾驶行为概率分布,结合LSTM解码器生成与特定驾驶行为相符的未来轨迹分布. 实验结果表明,所提模型具有良好的车辆轨迹预测性能,相较于基线模型,均方根误差平均减少27.9%,负对数似然平均减少56.45%.
关键词:
轨迹预测,
长短期记忆网络(LSTM),
图卷积网络(GCN),
卷积社交池化,
多模态预测
|
|
| [1] |
KHALIL R A, SAFELNASR Z, YEMANE N, et al Advanced learning technologies for intelligent transportation systems: prospects and challenges[J]. IEEE Open Journal of Vehicular Technology, 2024, 5: 397- 427
doi: 10.1109/OJVT.2024.3369691
|
|
|
| [2] |
XU Z, YUAN J, YU L, et al Machine learning-based traffic flow prediction and intelligent traffic management[J]. International Journal of Computer Science and Information Technology, 2024, 2 (1): 18- 27
|
|
|
| [3] |
方金凤, 张振伟, 孟祥福 基于深度学习的车辆轨迹预测研究进展[J]. 计算机科学与探索, 2026, 20 (2): 346- 366
FANG Jinfeng, ZHANG Zhenwei, MENG Xiangfu Advancements in deep learning-based vehicle trajectory prediction research[J]. Journal of Frontiers of Computer Science and Technology, 2026, 20 (2): 346- 366
|
|
|
| [4] |
GAO J, YU B, CHEN Y, et al An ADAS with better driver satisfaction under rear-end near-crash scenarios: a spatio-temporal graph transformer-based prediction framework of evasive behavior and collision risk[J]. Transportation Research Part C: Emerging Technologies, 2024, 159: 104491
doi: 10.1016/j.trc.2024.104491
|
|
|
| [5] |
HUANG Y, DU J, YANG Z, et al A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7 (3): 652- 674
doi: 10.1109/TIV.2022.3167103
|
|
|
| [6] |
王娜, 罗亮, 彭锟, 等 基于组稀疏卡尔曼滤波的多步轨迹预测方法[J]. 空军工程大学学报, 2023, 24 (6): 70- 77
WANG Na, LUO Liang, PENG Kun, et al A multi-step trajectory prediction method based on group sparse Kalman filtering[J]. Journal of Air Force Engineering University, 2023, 24 (6): 70- 77
doi: 10.3969/j.issn.2097-1915.2023.06.010
|
|
|
| [7] |
TAO L, WATANABE Y, YAMADA S, et al Comparative evaluation of Kalman filters and motion models in vehicular state estimation and path prediction[J]. Journal of Navigation, 2021, 74 (5): 1142- 1160
doi: 10.1017/S0373463321000370
|
|
|
| [8] |
佘翊妮, 裴植, 刘晴辉, 等 城市道路通勤车辆行驶轨迹的改进型隐马尔可夫预测方法[J]. 浙江工业大学学报, 2025, 53 (4): 437- 443
SHE Yini, PEI Zhi, LIU Qinghui, et al An improved hidden Markov prediction method for the trajectory of urban road vehicles[J]. Journal of Zhejiang University of Technology, 2025, 53 (4): 437- 443
doi: 10.3969/j.issn.1006-4303.2025.04.011
|
|
|
| [9] |
YAO H, LI X, YANG X Physics-aware learning-based vehicle trajectory prediction of congested traffic in a connected vehicle environment[J]. IEEE Transactions on Vehicular Technology, 2023, 72 (1): 102- 112
doi: 10.1109/TVT.2022.3203906
|
|
|
| [10] |
LI H, LIAO Z, RUI Y, et al A physical law constrained deep learning model for vehicle trajectory prediction[J]. IEEE Internet of Things Journal, 2023, 10 (24): 22775- 22790
doi: 10.1109/JIOT.2023.3305395
|
|
|
| [11] |
LEFKOPOULOS V, MENNER M, DOMAHIDI A, et al Interaction-aware motion prediction for autonomous driving: a multiple model Kalman filtering scheme[J]. IEEE Robotics and Automation Letters, 2021, 6 (1): 80- 87
doi: 10.1109/LRA.2020.3032079
|
|
|
| [12] |
WANG Y, LIU Z, ZUO Z, et al Trajectory planning and safety assessment of autonomous vehicles based on motion prediction and model predictive control[J]. IEEE Transactions on Vehicular Technology, 2019, 68 (9): 8546- 8556
doi: 10.1109/TVT.2019.2930684
|
|
|
| [13] |
WIRTHMÜLLER F, SCHLECHTRIEMEN J, HIPP J, et al Teaching vehicles to anticipate: a systematic study on probabilistic behavior prediction using large data sets[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22 (11): 7129- 7144
doi: 10.1109/TITS.2020.3002070
|
|
|
| [14] |
WANG Y, WANG C, ZHAO W, et al Decision-making and planning method for autonomous vehicles based on motivation and risk assessment[J]. IEEE Transactions on Vehicular Technology, 2021, 70 (1): 107- 120
doi: 10.1109/TVT.2021.3049794
|
|
|
| [15] |
宋秀兰, 董兆航, 单杭冠, 等 基于时空融合的多头注意力车辆轨迹预测[J]. 浙江大学学报: 工学版, 2023, 57 (8): 1636- 1643
SONG Xiulan, DONG Zhaohang, SHAN Hangguan, et al Vehicle trajectory prediction based on temporal-spatial multi-head attention mechanism[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (8): 1636- 1643
doi: 10.3785/j.issn.1008-973X.2023.08.016
|
|
|
| [16] |
YU H, HUO S, ZHU M, et al. Machine learning-based vehicle intention trajectory recognition and prediction for autonomous driving [C]// Proceedings of the 7th International Conference on Advanced Algorithms and Control Engineering. Shanghai: IEEE, 2024: 771–775.
|
|
|
| [17] |
张淼, 何仪娟, 杨博宇, 等 基于LSTM-KF模型的高速列车群组追踪运行轨迹预测方法[J]. 交通运输工程学报, 2024, 24 (3): 296- 310
ZHANG Miao, HE Yijuan, YANG Boyu, et al Trajectory prediction method for high-speed train group tracking operation based on LSTM-KF model[J]. Journal of Traffic and Transportation Engineering, 2024, 24 (3): 296- 310
|
|
|
| [18] |
QUAN R, ZHU L, WU Y, et al Holistic LSTM for pedestrian trajectory prediction[J]. IEEE Transactions on Image Processing, 2021, 30: 3229- 3239
doi: 10.1109/TIP.2021.3058599
|
|
|
| [19] |
高镇海, 鲍明喜, 高菲, 等 基于LSTM概率多模态预期轨迹预测方法[J]. 汽车工程, 2023, 45 (7): 1145- 1152
GAO Zhenhai, BAO Mingxi, GAO Fei, et al The method of probabilistic multi-modal expected trajectory prediction based on LSTM[J]. Automotive Engineering, 2023, 45 (7): 1145- 1152
doi: 10.19562/j.chinasae.qcgc.2023.07.005
|
|
|
| [20] |
李战武, 张帅, 乔英峰, 等 基于自注意力机制和CNN-LSTM的空战目标机动轨迹预测[J]. 兵器装备工程学报, 2023, 44 (7): 209- 216
LI Zhanwu, ZHANG Shuai, QIAO Yingfeng, et al Maneuvering trajectory prediction of air combat targets based on self-attention mechanism and CNN-LSTM[J]. Journal of Ordnance Equipment Engineering, 2023, 44 (7): 209- 216
|
|
|
| [21] |
ROSSI L, AJMAR A, PAOLANTI M, et al Vehicle trajectory prediction and generation using LSTM models and GANs[J]. PLoS One, 2021, 16 (7): e0253868
doi: 10.1371/journal.pone.0253868
|
|
|
| [22] |
HUANG Z, WANG J, PI L, et al LSTM based trajectory prediction model for cyclist utilizing multiple interactions with environment[J]. Pattern Recognition, 2021, 112: 107800
doi: 10.1016/j.patcog.2020.107800
|
|
|
| [23] |
IP A, IRIO L, OLIVEIRA R. Vehicle trajectory prediction based on LSTM recurrent neural networks [C]// Proceedings of the IEEE 93rd Vehicular Technology Conference. Helsinki: IEEE, 2021: 1–5.
|
|
|
| [24] |
SHENG Z, XU Y, XUE S, et al Graph-based spatial-temporal convolutional network for vehicle trajectory prediction in autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 17654- 17665
doi: 10.1109/TITS.2022.3155749
|
|
|
| [25] |
DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Salt Lake City: IEEE, 2018: 1549–1557.
|
|
|
| [26] |
KAWASAKI A, SEKI A. Multimodal trajectory predictions for urban environments using geometric relationships between a vehicle and lanes [C]// Proceedings of the IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 9203–9209.
|
|
|
| [27] |
CHEN X, ZHANG H, ZHAO F, et al Intention-aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for Internet of vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 19471- 19483
doi: 10.1109/TITS.2022.3170551
|
|
|
| [28] |
ZHANG T, SONG W, FU M, et al Vehicle motion prediction at intersections based on the turning intention and prior trajectories model[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8 (10): 1657- 1666
doi: 10.1109/JAS.2021.1003952
|
|
|
| [29] |
KATARIYA V, BAHARANI M, MORRIS N, et al DeepTrack: lightweight deep learning for vehicle trajectory prediction in highways[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 18927- 18936
doi: 10.1109/TITS.2022.3172015
|
|
|
| [30] |
KINGMA D P, BA J. Adam: a method for stochastic optimization [EB/OL]. (2017–01–30)[2025–05–29]. https://arxiv.org/abs/1412.6980.
|
|
|
| [31] |
PASZKE A, GROSS S, CHINTALA S, et al. Automatic differentiation in pytorch [C]// 31st International Conference on Neural Information Processing Systems. Long Beach: Curran Associates Inc, 2017: 1–4.
|
|
|
| [32] |
COIFMAN B, LI L A critical evaluation of the next generation simulation (NGSIM) vehicle trajectory dataset[J]. Transportation Research Part B: Methodological, 2017, 105: 362- 377
|
|
|
| [33] |
KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems [C]// Proceedings of the 21st International Conference on Intelligent Transportation Systems. Maui: IEEE, 2018: 2118–2125.
|
|
|
| [34] |
MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Non-local social pooling for vehicle trajectory prediction [C]// Proceedings of the IEEE Intelligent Vehicles Symposium. Paris: IEEE, 2019: 975–980.
|
|
|
| [35] |
SONG H, DING W, CHEN Y, et al. PiP: planning-informed trajectory prediction for autonomous driving [C]// Computer Vision – ECCV 2020. [S.l.]: Springer, 2020: 598–614.
|
|
|
| [36] |
YANG Z, GAO Z, GAO F, et al Intelligent vehicle moving trajectory prediction based on residual attention network[J]. World Electric Vehicle Journal, 2022, 13 (3): 47
doi: 10.3390/wevj13030047
|
|
|
| [37] |
WANG R, WANG S, YAN H, et al WSiP: wave superposition inspired pooling for dynamic interactions-aware trajectory prediction[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2023, 37 (4): 4685- 4692
doi: 10.1609/aaai.v37i4.25592
|
|
|
| [38] |
XIONG W, CHEN J, ZHANG X, et al. Hierarchical attention network for planning-informed multi-agent trajectory prediction [C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Detroit: IEEE, 2023: 5501–5506.
|
|
|
| [39] |
JIN L, LIU X, WANG Y, et al Multi-modality trajectory prediction with the dynamic spatial interaction among vehicles under connected vehicle environment[J]. Scientific Reports, 2024, 14: 2873
doi: 10.1038/s41598-024-53315-6
|
|
|
| [40] |
WEI Y, ZENG X, CHEN X, et al HTSA-LSTM: leveraging driving habits for enhanced long-term urban traffic trajectory prediction[J]. Applied Sciences, 2025, 15 (6): 2922
doi: 10.3390/app15062922
|
|
|
| [41] |
LIAO H, LI Y, LI Z, et al. Less is more: efficient brain-inspired learning for autonomous driving trajectory prediction [EB/OL]. (2024–07–09)[2025–05–29]. https://arxiv.org/pdf/2407.07020.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|