A spatio-temporal graph attention network for vehicle multimodal trajectory prediction (STGAMT) was proposed to address the challenges of predicting manually-driven vehicle trajectories and investigating their impact on autonomous driving decisions. The temporal and spatial characteristics were modeled based on the historical information about the vehicle. A two-dimensional convolutional neural network was employed to identify transverse and longitudinal lane change states, which were then combined with the output from the spatio-temporal dynamic interaction module to form transverse and longitudinal motion characteristics. The Softmax function was used to determine the vehicle’s driving intention. The multi-mode trajectory output was achieved by using a GRU network based on Gaussian conditional distribution. Experimental results showed that, in short-term predictions, the STGAMT model reduced the average error by 63.8% and 41.0% compared to the other five classic models on HighD and NGSIM datasets, respectively. In long-term predictions, the STGAMT model reduced the RMSE by 62.5% and 19.1% compared to the average RMSE of the other five classic models on HighD and NGSIM datasets, respectively. Results indicated that the STGAMT model could effectively improve the accuracy of manually-driven vehicle trajectory prediction.
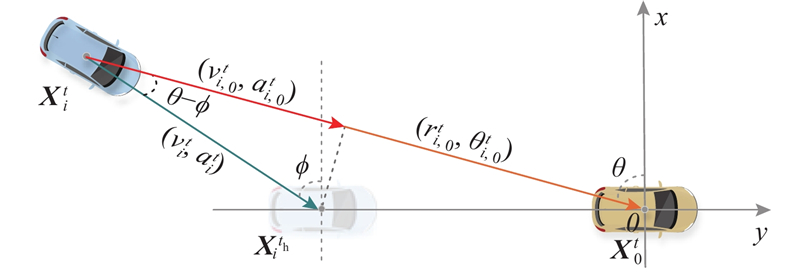
Fig.1Calculation diagram of vehicle relative motion state
Fig.2Diagram of STGAMT model structure
Fig.3Trajectories affected by historical time
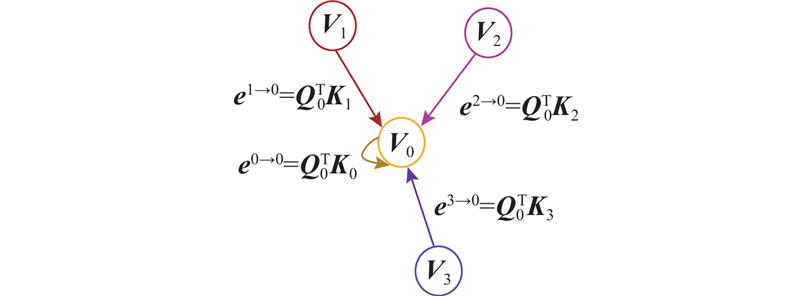
Fig.4Diagram of graph attention network
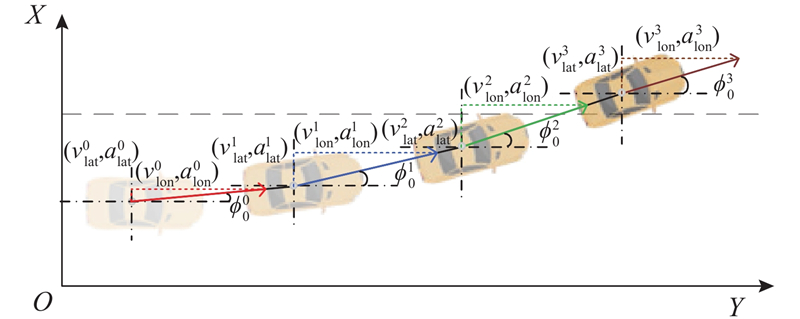
Fig.5Lane change trajectory of vehicle
Fig.6Structure of intention feature extraction operation
数据集
RMSE
tf/s
S-LSTM[16]
CS-LSTM[15]
S-GAN[14]
PIP[18]
STDAN[17]
STGAMT(w/o IFE)
STGAMT
HighD
1
0.22
0.22
0.20
0.17
0.19
0.07
0.07
2
0.62
0.61
0.57
0.52
0.27
0.19
0.19
3
1.27
1.24
1.14
1.05
0.48
0.35
0.32
4
2.15
2.10
1.90
1.76
0.91
0.65
0.61
5
3.14
3.27
2.91
2.63
1.66
1.20
1.14
NGSIM
1
0.65
0.61
0.57
0.55
0.42
0.22
0.21
2
1.31
1.27
1.32
1.18
1.01
0.80
0.78
3
2.16
2.09
2.22
1.94
1.69
1.52
1.49
4
3.25
3.10
3.26
2.88
2.56
2.47
2.40
5
4.55
4.37
4.40
4.04
3.67
3.69
3.58
Tab.1RMSE for different models in 5-second forecast range
模型名称
te/s
S-LSTM[16]
0.0157
CS-LSTM[15]
0.0174
S-GAN[14]
0.0283
PIP[18]
0.0185
STDAN[17]
0.0214
STGAMT(w/o IFE)
0.0137
STGAMT
0.0139
Tab.2Comparison of training time per epoch for models
数据集
tf/s
RMSE(lat)
RMSE(lon)
STGAMT (w/o IFE)
STGAMT
STGAMT (w/o IFE)
STGAMT
HighD
1
0.03
0.03
0.07
0.07
2
0.12
0.11
0.14
0.14
3
0.25
0.23
0.24
0.22
4
0.37
0.36
0.53
0.48
5
0.49
0.47
1.09
1.04
NGSIM
1
0.08
0.08
0.20
0.20
2
0.20
0.20
0.77
0.75
3
0.30
0.29
1.49
1.46
4
0.39
0.37
2.43
2.37
5
0.49
0.40
3.66
3.54
Tab.3RMSE comparison of ablation experiment
Fig.7Prediction trajectory and attention distribution map of target vehicle
[1]
ISLAM M M, NEWAZ A A, SONG L, et al Connected autonomous vehicles: state of practice[J]. Applied Stochastic Models in Business and Industry, 2023, 39 (5): 684- 700
doi: 10.1002/asmb.2772
[2]
HUANG Y J, DU J T, YANG Z R, et al A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7 (3): 652- 674
doi: 10.1109/TIV.2022.3167103
[3]
BENRACHOU D E, GLASER S, ELHENAWY M, et al Use of social interaction and intention to improve motion prediction within automated vehicle framework: a review[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (12): 22807- 22837
doi: 10.1109/TITS.2022.3207347
[4]
李文礼, 韩迪, 石晓辉, 等. 基于时-空注意力机制的车辆轨迹预测[J]. 中国公路学报, 2023, 36: 226–239. LI Wenli, HAN Di, SHI Xiaohui, et al, Vehicle trajectory prediction based on spatial-temporal attention mechanism[J]. China Journal of Highway and Transport , 2023, 36: 226–239.
[5]
ZHANG K P, LI L Explainable multimodal trajectory prediction using attention models[J]. Transportation Research Part C: Emerging Technologies, 2022, 143: 103829
doi: 10.1016/j.trc.2022.103829
[6]
DING Z, ZHAO H Incorporating driving knowledge in deep learning based vehicle trajectory prediction: a survey[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (8): 3996- 4015
doi: 10.1109/TIV.2023.3266446
[7]
HOUENOU A, BONNIFAIT P, CHERFAOUI V, et al. Vehicle trajectory prediction based on motion model and maneuver recognition [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Tokyo: IEEE, 2013: 4363–4369.
[8]
BARTH A, FRANKE U. Where will the oncoming vehicle be the next second? [C]// 2008 IEEE Intelligent Vehicles Symposium . Eindhoven: IEEE, 2008: 510–515.
[9]
JIANG Y, ZHU B, YANG S, et al Vehicle trajectory prediction considering driver uncertainty and vehicle dynamics based on dynamic bayesian network[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53 (2): 689- 703
doi: 10.1109/TSMC.2022.3186639
[10]
HUANG M, ZHU M, XIAO Y, et al Bayonet-corpus: a trajectory prediction method based on bayonet context and bidirectional GRU[J]. Digital Communications and Networks, 2021, 7 (1): 72- 81
doi: 10.1016/j.dcan.2020.03.002
[11]
ALTCHé F, DE LA FORTELLE A, IEEE. An LSTM network for highway trajectory prediction [C]// IEEE International Conference on Intelligent Transportation Systems . New York: IEEE, 2017: 253–259.
[12]
LI X, YING X W, CHUAH M C, et al. GRIP: graph-based interaction-aware trajectory prediction [C]// IEEE Intelligent Transportation Systems Conference . Auckland: IEEE, 2019: 3960–3966.
[13]
MO X U, YANG X, CHEN L. Graph and recurrent neural network-based vehicle trajectory prediction for highway driving [C]// IEEE International Intelligent Transportation Systems Conference . Indianapolis: IEEE, 2021: 1934–1939.
[14]
GUPTA A, JOHNSON J, LI F F, et al. Social GAN: socially acceptable trajectories with generative adversarial networks [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 2255–2264.
[15]
DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops . New York: IEEE, 2018: 1468–1476.
[16]
ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces [C]// IEEE Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2016: 961–971.
[17]
CHEN X, ZHANG H, ZHAO F, et al Intention-aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for internet of vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 19471- 19483
doi: 10.1109/TITS.2022.3170551
[18]
SONG H, DING W C, CHEN Y X, et al. PiP: planning-informed trajectory prediction for autonomous driving [C]// Computer Vision - ECCV 2020 16th European Conference Proceedings Lecture Notes in Computer Science . Glasgow: LNCS, 2020: 598–614.