|
|
|
| Vehicle trajectory prediction model integrating dynamic risk map and multivariate attention mechanism |
Wenqiang CHEN1( ),Linyue FENG2,Dongdan WANG2,Yulei GU3,*(),Xuan ZHAO3 ),Linyue FENG2,Dongdan WANG2,Yulei GU3,*(),Xuan ZHAO3 |
1. School of Future Transportation, Chang’an University, Xi’an 710064, China
2. School of Transportation Engineering, Chang’an University, Xi’an 710064, China
3. School of AutoMobile, Chang’an University, Xi’an 710064, China |
|
|
|
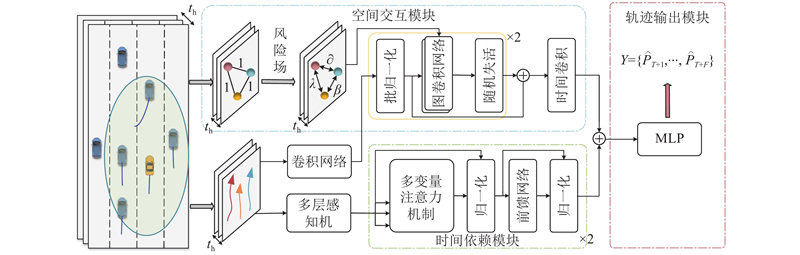
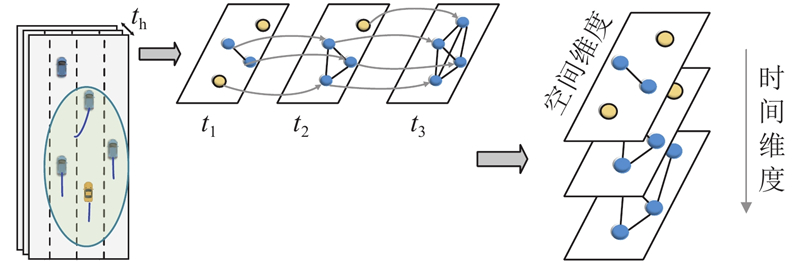
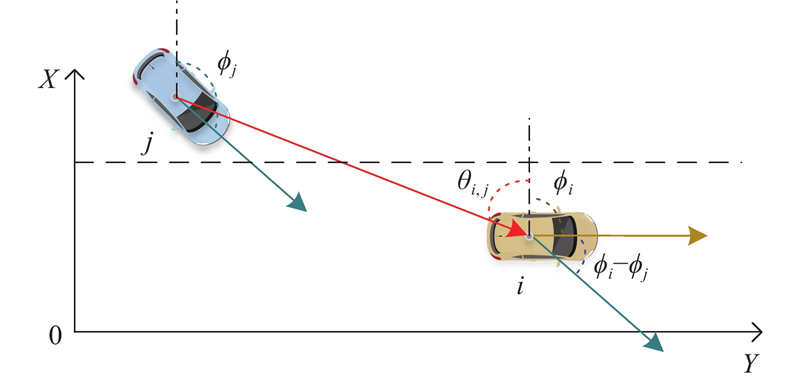
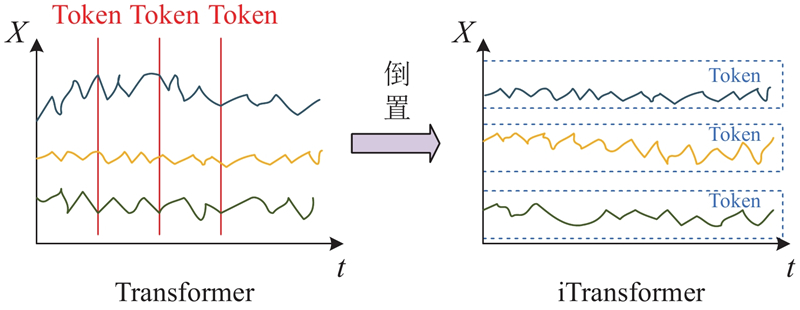
Abstract A multi-target trajectory cooperative prediction model (RGMA) based on a dynamic risk map and multivariate attention mechanism was proposed aiming at the problems of insufficient accuracy and generalization ability in vehicle trajectory prediction in complex traffic scenarios. A dynamic risk graph that integrated multi-factor interaction features such as vehicle size, speed, acceleration, and heading angle was constructed, and the conflict risk between vehicles was quantified as the adjacency weight of the graph convolutional network, enhancing the physical interpretability of spatial interaction modeling. A multivariate attention Transformer module was designed to treat the time series of each variable as an independent token, capturing cross-variable dependency and long-term temporal feature in order to improve temporal modeling capability. The future trajectories of multiple vehicles were output through concatenating the spatiotemporal feature and a multilayer perceptron. Experiments on real-world dataset NGSIM and HighD show that RGMA outperforms existing mainstream methods in both short-term and long-term prediction. Ablation study verifies the effectiveness of each module and the robustness of the model.
|
|
Received: 23 September 2025
Published: 04 February 2026
|
|
|
| Fund: 国家重点研发计划资助项目(2024YFB2505703);国家自然科学基金资助项目(52172362);陕西省自然科学基金资助项目(2025JC-YBMS-374);中央高校基本科研业务费专项资金资助项目(300102344203);陕西省交通运输厅科技资助项目(ZYXZB-20230223). |
|
Corresponding Authors:
Yulei GU
E-mail: cwq@chd.edu.cn;guylei001@chd.edu.cn
|
融合动态风险图与多变量注意力机制的车辆轨迹预测模型
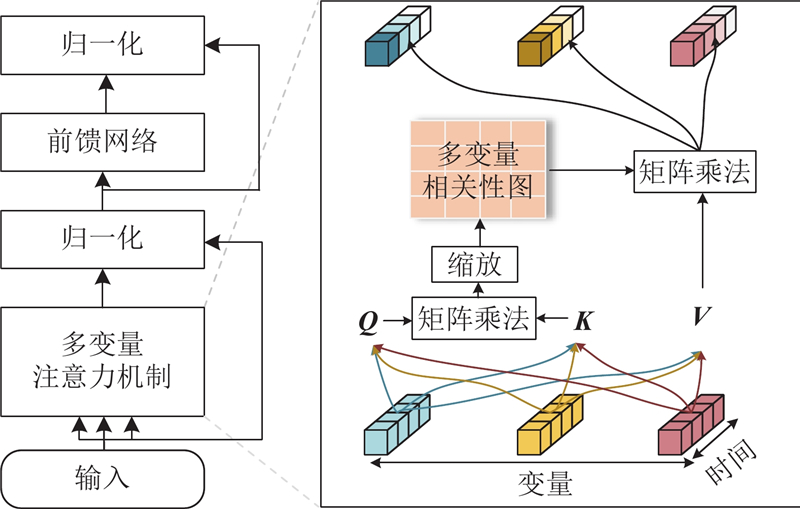
针对复杂交通场景中车辆轨迹预测精度与泛化能力不足的问题,提出基于动态风险图和多变量注意力机制融合的车辆多目标轨迹协同预测模型(RGMA). 该模型通过构建动态风险图,融合车辆尺寸、速度、加速度和角度等多因素交互特征,量化车辆间的冲突风险作为图卷积网络的邻接权重,增强空间交互建模的物理可解释性. 设计多变量注意力Transformer模块,将各变量时间序列作为独立token,捕捉跨变量依赖与长时序特征,提升时间维度建模的能力. 通过拼接时空特征并经由多层感知机输出多车辆未来轨迹. 在NGSIM和HighD真实数据集上的实验表明,RGMA在短期与长期预测中均优于现有的主流方法,通过消融实验验证了各模块的有效性与模型鲁棒性.
关键词:
车辆轨迹预测,
动态风险图,
多变量注意力机制,
自动驾驶系统,
图神经网络
|
|
| [1] |
GRIGORESCU S, TRASNEA B, COCIAS T, et al A survey of deep learning techniques for autonomous driving[J]. Journal of Field Robotics, 2020, 37 (3): 362- 386
doi: 10.1002/rob.21918
|
|
|
| [2] |
陈文强, 王东丹, 朱文英, 等 基于时空图注意力网络的车辆多模态轨迹预测模型[J]. 浙江大学学报: 工学版, 2025, 59 (3): 443- 450
CHEN Wenqiang, WANG Dongdan, ZHU Wenying, et al Vehicle multimodal trajectory prediction model based on spatiotemporal graph attention network[J]. Journal of Zhejiang University: Engineering Science, 2025, 59 (3): 443- 450
|
|
|
| [3] |
LEFÈVRE S, VASQUEZ D, LAUGIER C A survey on motion prediction and risk assessment for intelligent vehicles[J]. ROBOMECH Journal, 2014, 1 (1): 1
|
|
|
| [4] |
LEFKOPOULOS V, MENNER M, DOMAHIDI A, et al Interaction-aware motion prediction for autonomous driving: a multiple model Kalman filtering scheme[J]. IEEE Robotics and Automation Letters, 2021, 6 (1): 80- 87
doi: 10.1109/LRA.2020.3032079
|
|
|
| [5] |
WANG Y, WANG C, ZHAO W, et al Decision-making and planning method for autonomous vehicles based on motivation and risk assessment[J]. IEEE Transactions on Vehicular Technology, 2021, 70 (1): 107- 120
doi: 10.1109/TVT.2021.3049794
|
|
|
| [6] |
LI J, DAI B, LI X, et al A dynamic Bayesian network for vehicle maneuver prediction in highway driving scenarios: framework and verification[J]. Electronics, 2019, 8 (1): 40
doi: 10.3390/electronics8010040
|
|
|
| [7] |
STREUBEL T, HOFFMANN K H. Prediction of driver intended path at intersections [C]//Proceedings of the IEEE Intelligent Vehicles Symposium. [S. l. ]: IEEE, 2014: 134−139.
|
|
|
| [8] |
TRAN Q, FIRL J. Online maneuver recognition and multimodal trajectory prediction for intersection assistance using non-parametric regression [C]//2014 IEEE Intelligent Vehicles Symposium. Dearborn: IEEE, 2014: 118−123.
|
|
|
| [9] |
SCHREIER M, WILLERT V, ADAMY J. Bayesian, maneuver-based, long-term trajectory prediction and criticality assessment for driver assistance systems [C]//Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems. Qingdao: IEEE, 2014: 334–341.
|
|
|
| [10] |
REN Y Y, ZHAO L, ZHENG X L, et al A method for predicting diverse lane-changing trajectories of surrounding vehicles based on early detection of lane change[J]. IEEE Access, 2022, 10: 17451- 17472
|
|
|
| [11] |
LI J, MA H, ZHAN W, et al. Generic probabilistic interactive situation recognition and prediction: from virtual to real [C]//Proceedings of the 21st International Conference on Intelligent Transportation Systems. Maui: IEEE, 2018: 3218–3224.
|
|
|
| [12] |
DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction [C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Salt Lake City: IEEE, 2018: 1549–15498.
|
|
|
| [13] |
GUPTA A, JOHNSON J, LI F F, et al. Social GAN: socially acceptable trajectories with generative adversarial networks [C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 2255–2264.
|
|
|
| [14] |
ZHAO T, XU Y, MONFORT M, et al. Multi-agent tensor fusion for contextual trajectory prediction [C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2020: 12118–12126.
|
|
|
| [15] |
LI X, YING X, CHUAH M C. GRIP: graph-based interaction-aware trajectory prediction [C]//Proceedings of the IEEE Intelligent Transportation Systems Conference. Auckland: IEEE, 2019: 3960–3966.
|
|
|
| [16] |
ZHANG K, ZHAO L, DONG C, et al AI-TP: attention-based interaction-aware trajectory prediction for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (1): 73- 83
|
|
|
| [17] |
MO X, XING Y, LV C. Graph and recurrent neural network-based vehicle trajectory prediction for highway driving [C]//Proceedings of the IEEE International Intelligent Transportation Systems Conference. Indianapolis: IEEE, 2021: 1934−1939.
|
|
|
| [18] |
HELBING D, MOLNÁR P Social force model for pedestrian dynamics[J]. Physical Review E, 1995, 51 (5): 4282- 4286
|
|
|
| [19] |
ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces [C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 961–971.
|
|
|
| [20] |
MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al Attention based vehicle trajectory prediction[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6 (1): 175- 185
doi: 10.1109/TIV.2020.2991952
|
|
|
| [21] |
LIN L, LI W, BI H, et al Vehicle trajectory prediction using LSTMs with spatial–temporal attention mechanisms[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14 (2): 197- 208
doi: 10.1109/MITS.2021.3049404
|
|
|
| [22] |
GUO H, MENG Q, CAO D, et al Vehicle trajectory prediction method coupled with ego vehicle motion trend under dual attention mechanism[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 2507516
|
|
|
| [23] |
LI C, LIU Z, YANG N, et al Regional attention network with data-driven modal representation for multimodal trajectory prediction[J]. Expert Systems with Applications, 2023, 232: 120808
|
|
|
| [24] |
CHEN X, ZHANG H, ZHAO F, et al Intention-aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for Internet of vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 19471- 19483
doi: 10.1109/TITS.2022.3170551
|
|
|
| [25] |
DIEHL F, BRUNNER T, LE M T, et al. Graph neural networks for modelling traffic participant interaction [C]//Proceedings of the IEEE Intelligent Vehicles Symposium. Paris: IEEE, 2019: 695–701.
|
|
|
| [26] |
CHEN H. STGCN for modeling vehicle trajectory in highway scenario [C]//Proceedings of the 5th International Conference on Mechanical, Control and Computer Engineering. Harbin: IEEE, 2020: 1115−1118.
|
|
|
| [27] |
SHENG Z, XU Y, XUE S, et al Graph-based spatial-temporal convolutional network for vehicle trajectory prediction in autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 17654- 17665
doi: 10.1109/TITS.2022.3155749
|
|
|
| [28] |
LI F J, ZHANG C Y, PHILIP CHEN C L STS-DGNN: vehicle trajectory prediction via dynamic graph neural network with spatial–temporal synchronization[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 2525413
|
|
|
| [29] |
VASWANI A, SHAZEER N, PARMAR N, et al Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30: 5998- 6008
|
|
|
| [30] |
QUINTANAR A, FERNÁNDEZ-LLORCA D, PARRA I, et al. Predicting vehicles trajectories in urban scenarios with transformer networks and augmented information [C]//Proceedings of the IEEE Intelligent Vehicles Symposium. Nagoya: IEEE, 2021: 1051–1056.
|
|
|
| [31] |
GENG M, LI J, XIA Y, et al A physics-informed Transformer model for vehicle trajectory prediction on highways[J]. Transportation Research Part C: Emerging Technologies, 2023, 154: 104272
doi: 10.1016/j.trc.2023.104272
|
|
|
| [32] |
GAO K, LI X, CHEN B, et al Dual transformer based prediction for lane change intentions and trajectories in mixed traffic environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24 (6): 6203- 6216
doi: 10.1109/TITS.2023.3248842
|
|
|
| [33] |
CHEN X, ZHANG H, ZHAO F, et al Vehicle trajectory prediction based on intention-aware non-autoregressive transformer with multi-attention learning for Internet of vehicles[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 2513912
|
|
|
| [34] |
XU D, SHANG X, LIU Y, et al Group vehicle trajectory prediction with global spatio-temporal graph[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (2): 1219- 1229
doi: 10.1109/TIV.2022.3200338
|
|
|
| [35] |
徐东伟, 程千兵, 顾同成, 等 基于时空交互特征融合的车辆轨迹预测方法研究[J]. 中国公路学报, 2025, 38 (11): 447- 458
XU Dongwei, CHENG Qianbing, GU Tongcheng, et al Research on vehicle trajectory prediction method based on spatio-temporal interaction feature fusion[J]. China Journal of Highway and Transport, 2025, 38 (11): 447- 458
|
|
|
| [36] |
CHEN C, CHEN X, GUO C, et al Trajectory prediction for autonomous driving based on structural informer method[J]. IEEE Transactions on Automation Science and Engineering, 2025, 22: 17452- 17463
|
|
|
| [37] |
WANG W, CHEN W, QIU Q, et al CrossFormer: a versatile vision transformer hinging on cross-scale attention[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45 (8): 10260- 10276
|
|
|
| [38] |
WANG J, WU J, ZHENG X, et al Driving safety field theory modeling and its application in pre-collision warning system[J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 306- 324
doi: 10.1016/j.trc.2016.10.003
|
|
|
| [39] |
MA H, AN B, LI L, et al Anisotropy safety potential field model under intelligent and connected vehicle environment and its application in car-following modeling[J]. Journal of Intelligent and Connected Vehicles, 2023, 6 (2): 79- 90
doi: 10.26599/JICV.2023.9210006
|
|
|
| [40] |
袁阳阳. 基于近似模型的汽车尾部结构减阻优化 [D]. 重庆: 重庆交通大学, 2018.
YUAN Yangyang. Drag reduction optimization of vehicle rear structure based on approximate model [D]. Chongqing: Chongqing Jiaotong University, 2018.
|
|
|
| [41] |
李文中, 王立, 李振兴, 等 不同尺寸车身轻量化评价及重量目标设定[J]. 汽车实用技术, 2020, 45 (19): 122- 124
LI Wenzhong, WANG Li, LI Zhenxing, et al BIW lightweight evaluation and weight target setting method for different size vehicle[J]. Automobile Applied Technology, 2020, 45 (19): 122- 124
doi: 10.16638/j.cnki.1671-7988.2020.19.039
|
|
|
| [42] |
WOLF M T, BURDICK J W. Artificial potential functions for highway driving with collision avoidance [C]//Proceedings of the IEEE International Conference on Robotics and Automation. Pasadena: IEEE, 2008: 3731–3736.
|
|
|
| [43] |
LI L, GAN J, JI X, et al Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (1): 122- 141
doi: 10.1109/TITS.2020.3008284
|
|
|
| [44] |
LV P, WANG W, WANG Y, et al SSAGCN: social soft attention graph convolution network for pedestrian trajectory prediction[J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35 (9): 11989- 12003
doi: 10.1109/TNNLS.2023.3250485
|
|
|
| [45] |
LIU Y, HU T, ZHANG H, et al. iTransformer: inverted transformers are effective for time series forecasting [EB/OL]. [2025−09−10]. https://arxiv.org/abs/2310.06625.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|