|
|
|
| Dynamic analysis of a 7-DOF redundant and hybrid mechanical arm |
Ze-sheng WANG( ),Yan-biao LI*(),Yi-qin LUO,Peng SUN,Bo CHEN,Hang ZHENG ),Yan-biao LI*(),Yi-qin LUO,Peng SUN,Bo CHEN,Hang ZHENG |
| College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310032, China |
|
|
|
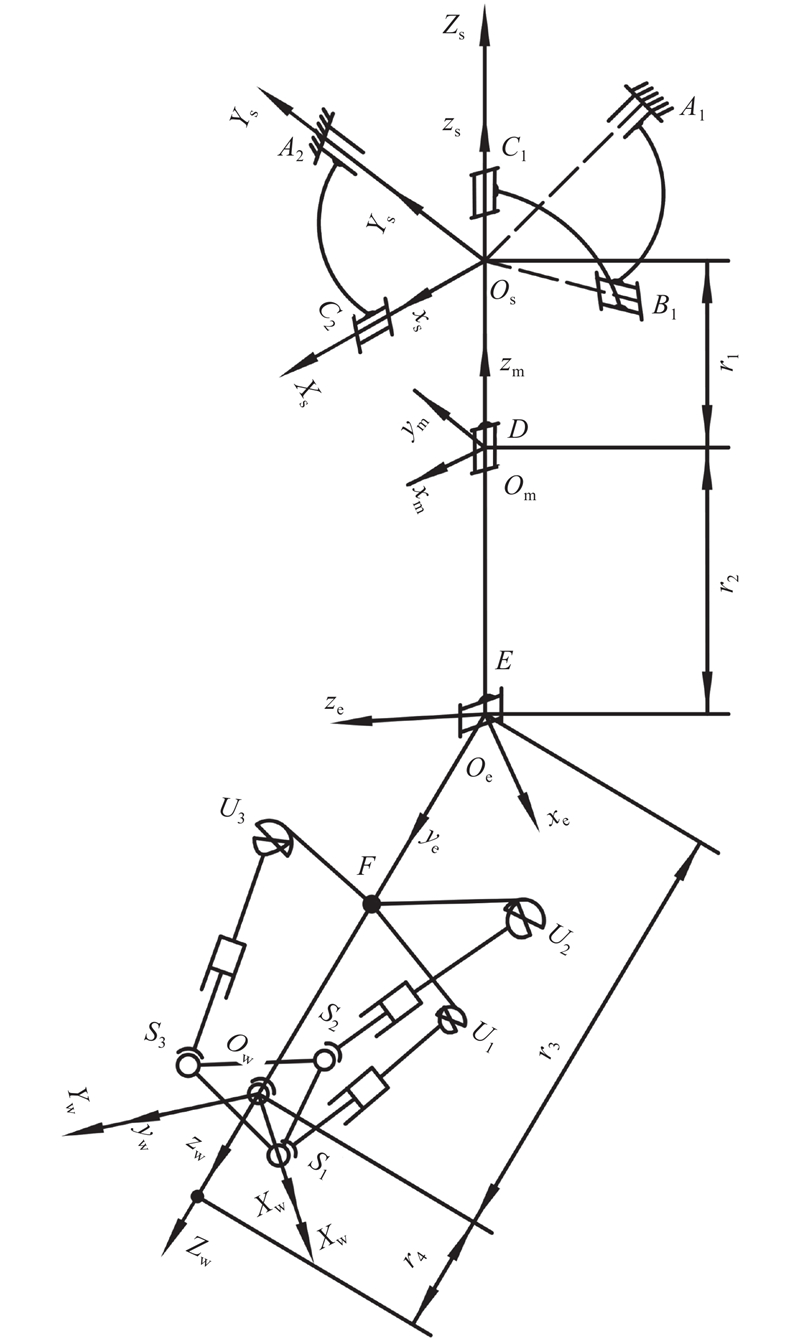
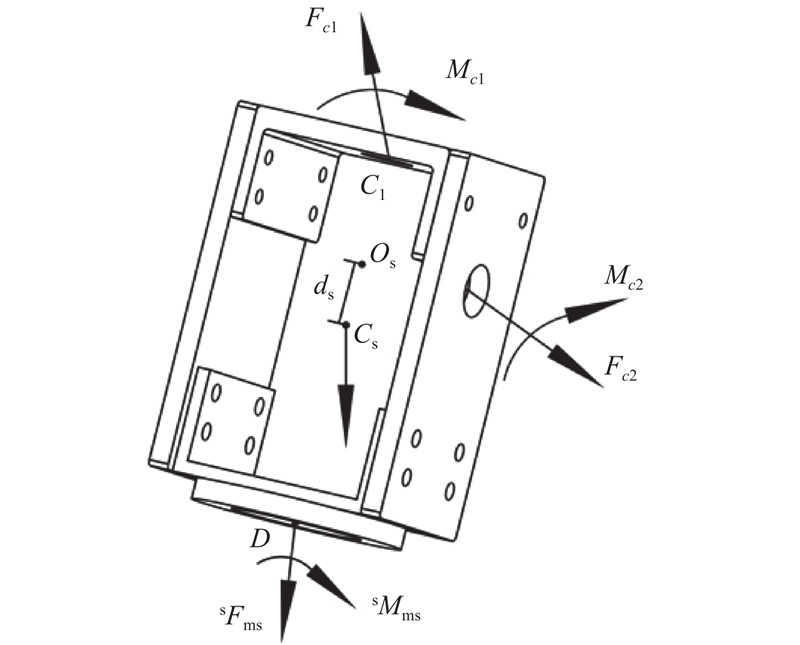
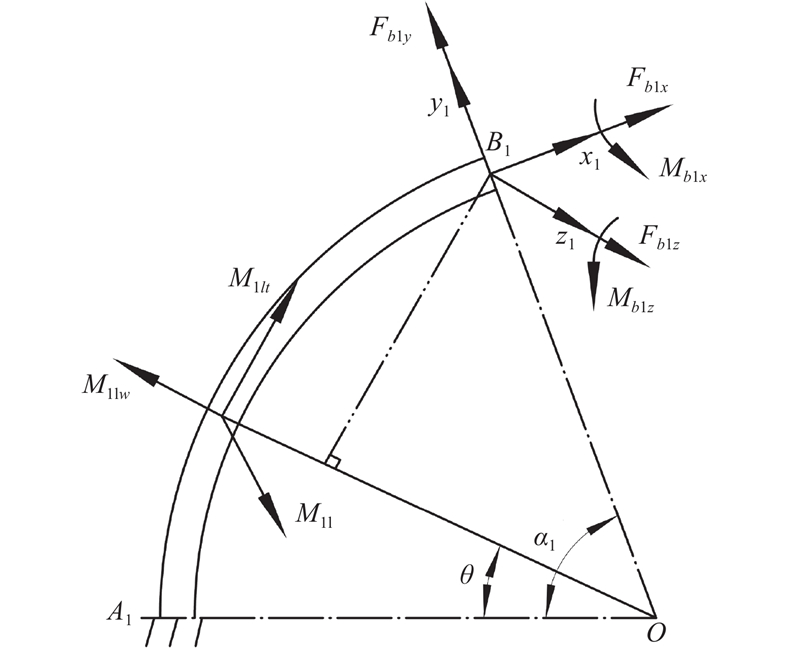
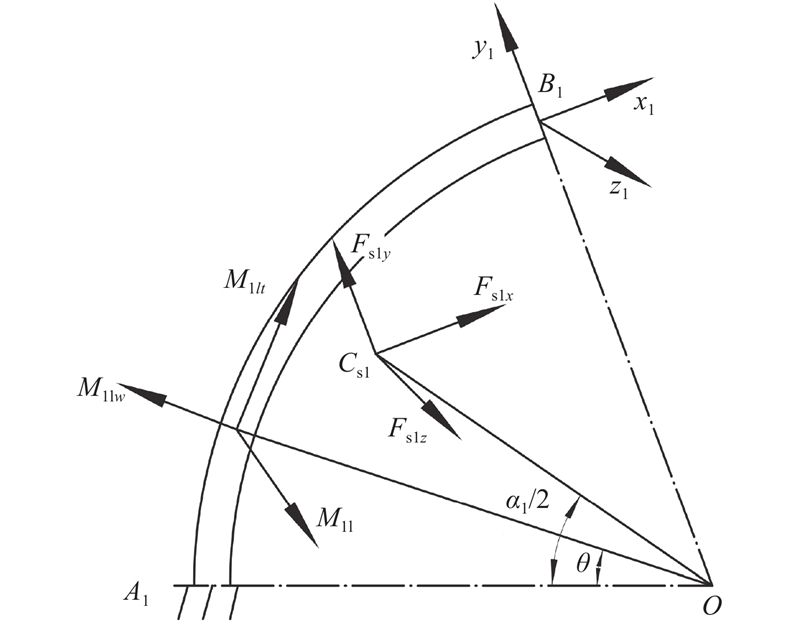
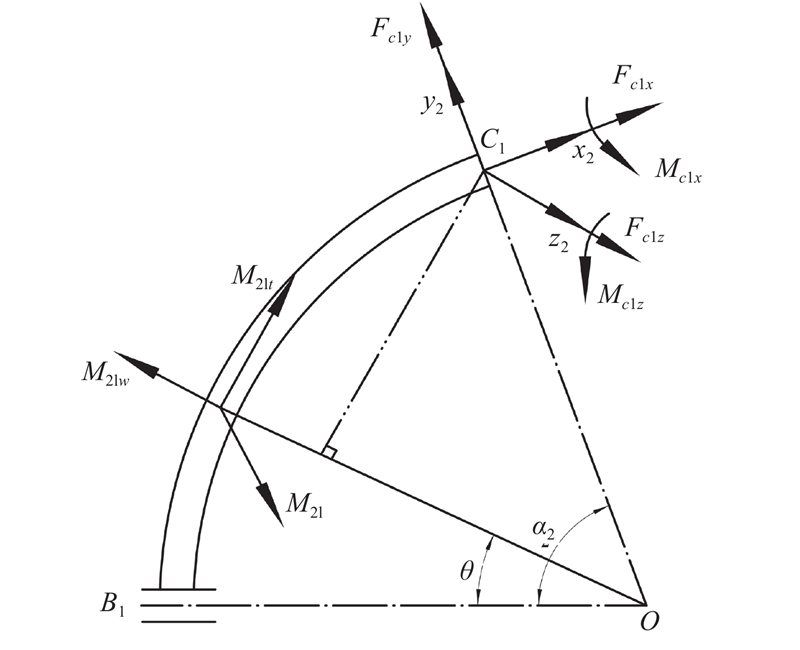
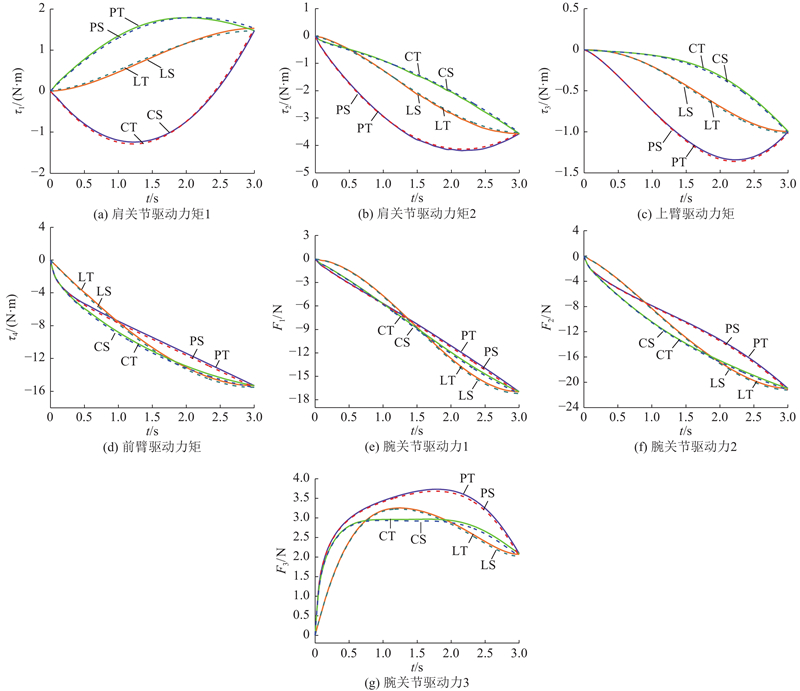
Abstract A novel 7-DOF redundant and serial-parallel hybrid humanoid arm mechanism was proposed, inspired by the motion characteristics of human arm joints, and the dynamic modeling method of the hybrid mechanism was proposed taking the mechanism as an example. The velocity and acceleration of each component are derived by the vector method in respective joint coordinate system, according to the motion transmissibility characteristics. The equilibrium equations of the redundant hybrid mechanical arm are established by the Newton-Euler method in respective joint coordinate system. The number of the unknown variables of the required solutions are 27, since the shoulder joint is an over-constrain mechanism. The number of dynamic equations based on Newton's Euler method is 24. Three deformation coordination equations are derived by utilizing the micro-deformation and superposition principle, by adding the relation between the deformation of the member caused by the redundant constrained force (torque) and the position error of the moving platform as a complementary condition. The complete dynamics model of the manipulator is obtained by simultaneous equations. The correctness of dynamics model is verified by simulation results of the linear, parabolic and circular trajectories. The correctness of the modeling lays the foundation for further research and application of the mechanism.
|
|
Received: 15 July 2019
Published: 28 August 2020
|
|
|
|
Corresponding Authors:
Yan-biao LI
E-mail: wzs163yx@163.com;lybrory@zjut.edu.cn
|
七自由度冗余混联机械臂的动力学分析
结合人体手臂关节的运动特点,提出新型七自由度冗余串并混联拟人机械臂机构,并以该机构为例提出混联机构动力学建模方法. 根据运动的传递特性,采用矢量法推导出各个构件在各关节坐标系中的速度和加速度. 基于牛顿-欧拉法在各关节坐标系建立冗余混联机械臂机构的力平衡方程,由于肩关节为过约束机构,所要求解的未知量为27个,基于牛顿欧拉法所建动力学方程为24个. 引入冗余约束力(力矩)引起的杆件变形与动平台位置误差的关系作为补充条件,利用小变形叠加原理补充3个肩关节机构的变形协调方程,联立方程组得到机械臂动力学全解模型. 通过直线、抛物线和圆形轨迹的算例仿真结果验证动力学模型的正确性,为该机构的进一步研究及应用奠定理论基础.
关键词:
拟人机械臂,
冗余自由度,
混联,
动力学建模,
变形协调方程
|
|
| [1] |
ORIN D E, GOSWAMI A, LEE S H Centroidal dynamics of a humanoid robot[J]. Autonomous Robots, 2013, 35 (2/3): 161- 176
|
|
|
| [2] |
KUINDERSMA S, DEITS R, FALLON M, et al Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot[J]. Autonomous Robots, 2016, 40 (3): 429- 455
doi: 10.1007/s10514-015-9479-3
|
|
|
| [3] |
EBRAHIMI I, CARRETERO J A, BOUNDREAU R 3-PRRR redundant planar parallel manipulator: inverse displacement, workspace and singularity analyses[J]. Mechanism and Machine Theory, 2007, 42 (8): 1007- 1016
doi: 10.1016/j.mechmachtheory.2006.07.006
|
|
|
| [4] |
LITTLE D R Numerical predictions for serial, parallel, and coactive logical rule-based models of categorization response time[J]. Behavior Research Methods, 2012, 44 (4): 1148- 1156
doi: 10.3758/s13428-012-0202-4
|
|
|
| [5] |
BGHERMAN B, PISLA D, VAIDA C, et al Development of inverse dynamic model for a surgical hybrid parallel robot with equivalent lumped masses[J]. Robotics and Computer Integrated Manufacturing, 2012, 2 (3): 402- 415
|
|
|
| [6] |
DASGUPTA D, MRUTHYUNJAYA T S Force redundancy in parallel manipulators: theoretical and practical issue[J]. Mechanism and Machine Theory, 1998, 33 (6): 727- 742
doi: 10.1016/S0094-114X(97)00094-3
|
|
|
| [7] |
YI B J, OH S R, SUH I H A five-bar finger mechanism involving redundant actuators: analysis and its applications[J]. IEEE Transactions on Robotics and Automation, 1999, 15 (6): 1001- 1010
doi: 10.1109/70.817665
|
|
|
| [8] |
CHAKAROV D Study of the antagonistic stiffness of parallel manipulators with actuation redundancy[J]. Mechanism and Machine Theory, 2004, 39 (6): 583- 601
doi: 10.1016/j.mechmachtheory.2003.12.001
|
|
|
| [9] |
张东胜, 许允斗, 姚建涛, 等 2RPU/UPR+RP五自由度混联机器人静刚度分析[J]. 中国机械工程, 2018, 29 (6): 712- 719
ZHANG Dong-sheng, XU Yun-dou, YAO Jian-tao, et al Static stiffness analysis of 2RPU/UPR+RP 5-DOF hybrid manipulators[J]. China Mechanical Engineering, 2018, 29 (6): 712- 719
doi: 10.3969/j.issn.1004-132X.2018.06.012
|
|
|
| [10] |
王晓磊, 金振林, 李晓丹 串并混联仿生机械腿静力学性能分析[J]. 农业机械学报, 2019, 50 (1): 383- 389
WANG Xiao-lei, JIN Zhen-lin, LI Xiao-dan Analysis of static performance of serial-parallel hybrid bionic mechanical leg[J]. Transactions of the Chinese Society for Agricultural Machi-nery, 2019, 50 (1): 383- 389
doi: 10.6041/j.issn.1000-1298.2019.01.044
|
|
|
| [11] |
徐奕柳, 杨龙, 杨中原, 等 新型PURU+RR+S球面并联人形机器人踝关节机构动力学性能分析[J]. 中国机械工程, 2017, 28 (16): 1971- 1976
XU Yi-liu, YANG Long, YANG Zhong-yuan, et al Dynamics property analyses of a novel PURU+RR+S spherical parallel humanoid robotic ankle mechani- sms[J]. China Mechanical Engineering, 2017, 28 (16): 1971- 1976
doi: 10.3969/j.issn.1004-132X.2017.16.012
|
|
|
| [12] |
WANG L, WU J, WANG J Dynamic formulation of a planar 3-DOF parallel manipulator with actuation redundancy[J]. Robotics and Computer Integrated Manufacturing, 2010, 26 (1): 67- 73
doi: 10.1016/j.rcim.2009.03.001
|
|
|
| [13] |
CHUNG C Y, LEE B H, KIM M S, et al Torque optimizing control with singularity-robustness for kinematically redundant robots[J]. Journal of Intelligent and Robotic Systems, 2000, 28 (3): 231- 258
doi: 10.1023/A:1008152705719
|
|
|
| [14] |
KALNI H, REZAEI A, AKBARZADEH A Improved general solution for the dynamic modeling of Gough-Stewart platform based on principle of virtual work[J]. Nonlinear Dynamics, 2016, 83 (4): 2393- 2418
doi: 10.1007/s11071-015-2489-z
|
|
|
| [15] |
MOOSAVIAN S A A, POURREZA A, ALIPOUR K Dynamics and stability of a hybrid serial-parallel mobile robot[J]. Mathematical and Computer Modelling of Dynamical Systems, 2010, 16 (1): 35- 56
doi: 10.1080/13873951003676518
|
|
|
| [16] |
WANG X, YU H, WANG H, et al. Dynamic analysis for the leg mechanism of a wheel-leg hybrid rescue robot [C]// 2014 UKACC International Conference on Control (CONTROL). Luoyang: IEEE, 2014: 504-508.
|
|
|
| [17] |
SANGVERAPHUNSIRI V, CHOOPRASIRD K Dynamics and control of a 5-DOF manipulator based on an H-4 parallel mechanism[J]. International Journal of Advanced Manufactu-ring Technology, 2011, 52 (1?4): 343- 364
doi: 10.1007/s00170-010-2722-3
|
|
|
| [18] |
孙鹏, 李研彪, 郭明飞 一种仿人肩关节的运动学和工作空间分析[J]. 兵工学报, 2019, 40 (2): 384- 394
SUN Peng, LI Yan-biao, GUO Ming-fei Kinematics and working space analysis of a humanoid shoulder Joint[J]. Acta Armamentarii, 2019, 40 (2): 384- 394
|
|
|
| [19] |
STAICU S Dynamics of the spherical 3-UPS/S parallel mechanism with prismatic actuators[J]. Multibody System Dynamics, 2009, 22 (2): 115- 132
doi: 10.1007/s11044-009-9150-x
|
|
|
| [20] |
李研彪, 王泽胜, 孙鹏, 等 一种四自由度冗余串并混联拟人机械臂的动载协调分配优化[J]. 机械工程学报, 2020, 56 (9): 45- 54
LI Yan-biao, WANG Ze-sheng, SUN Peng, et al Dynamic load distribution optimization for a 4-DOF redundant and series-parallel hybrid humanoid arm[J]. Journal of Mechanical Engineering, 2020, 56 (9): 45- 54
|
|
|
| [21] |
张 亮. 仿人机器人肩肘腕关节及臂的设计[D]. 秦皇岛: 燕山大学, 2016: 104-109.
ZHANG Liang. Design for shoulder elbow wrist Joint and arm of humanoid robot [D]. Qinhuangdao: Yanshan University, 2016: 104-109.
|
|
|
| [22] |
印松, 陈竟新, 唐矫燕 基于牛顿—欧拉法的3-UPS/S并联机构动力学分析[J]. 制造业自动化, 2013, 35 (2): 86- 88
YIN Song, CHEN Jing-xin, TANG Jiao-yan Dynamic analysis of the 3-UPS/S parallel mechanism based on Newton-Euler method[J]. Manufacturing Automation, 2013, 35 (2): 86- 88
doi: 10.3969/j.issn.1009-0134.2013.01(x).24
|
|
|
| [23] |
周玉林, 刘 磊, 高 峰, 等 3自由度球面并联机构3-RRR静力全解[J]. 机械工程学报, 2008, 44 (6): 169- 176
ZHOU Yu-lin, LIU Lei, GAO Feng, et al Static full-solutions of spherical parallel mechanism 3-RRR with 3-DOF[J]. Journal of Mechanical Engineering, 2008, 44 (6): 169- 176
doi: 10.3321/j.issn:0577-6686.2008.06.026
|
|
|
| [24] |
AZIZI M R, NADERI D Dynamic modeling and trajectory planning for a mobile spherical robot with a 3D of inner mechanism[J]. Mechanism and Machine Theory, 2013, 64: 251- 261
doi: 10.1016/j.mechmachtheory.2013.02.004
|
|
|
| [25] |
陈纯, 徐永帅, 王佳伟, 等 并联驱动双向偏转平台设计与动力学分析[J]. 农业机械学报, 2019, 50 (5): 420- 426
CHEN Chun, XU Yong-shuai, WANG Jia-wei, et al Design and dynamic analysis of novel parallel bidirectional deflection platform[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50 (5): 420- 426
doi: 10.6041/j.issn.1000-1298.2019.05.048
|
|
|
| [26] |
朱伟, 郭倩, 马致远, 等. SCARA并联机构刚度和动力学分析[J]. 农业机械学报, 2019, 50(10): 375-385.
ZHU Wei, GUO Qian, MA Zhi-yuan, et al. Stiffness and dynamics analysis of a new SCARA parallel mechanism [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(10): 375-385.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|