|
|
|
| Model predictive control energy management based ondriver demand torque prediction |
Dong-dong JIANG,Dao-fei LI*( ),Xiao-li YU ),Xiao-li YU |
| Institute of Power Machinery and Vehicular Engineering, Zhejiang University, Hangzhou 310027, China |
|
|
|
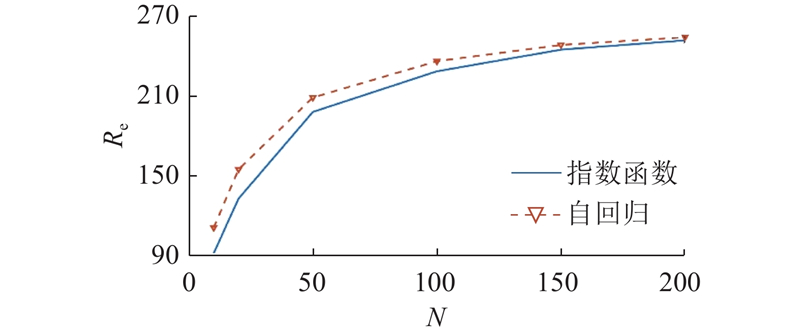
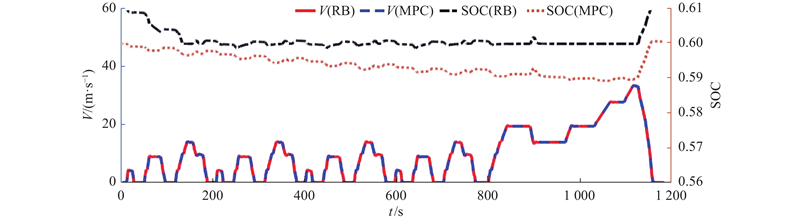
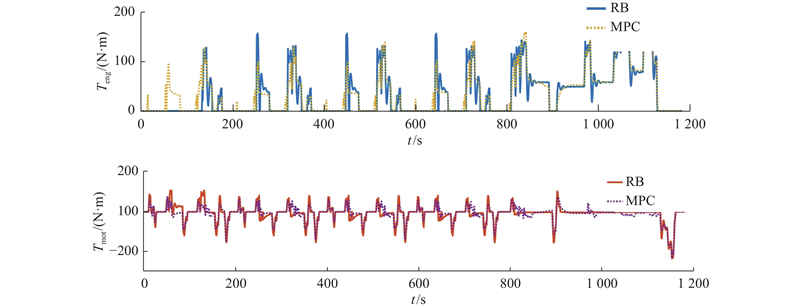
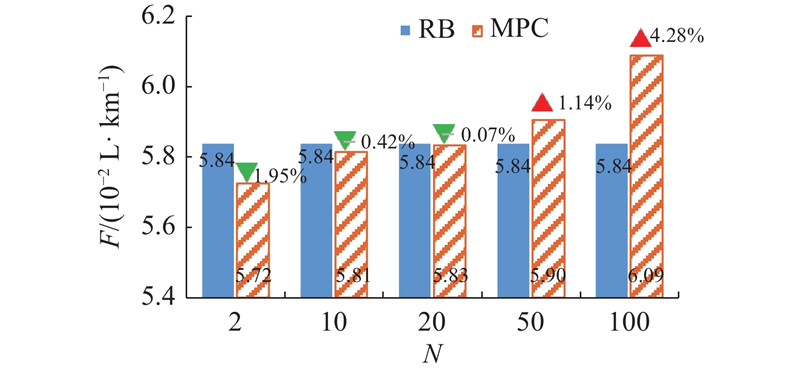
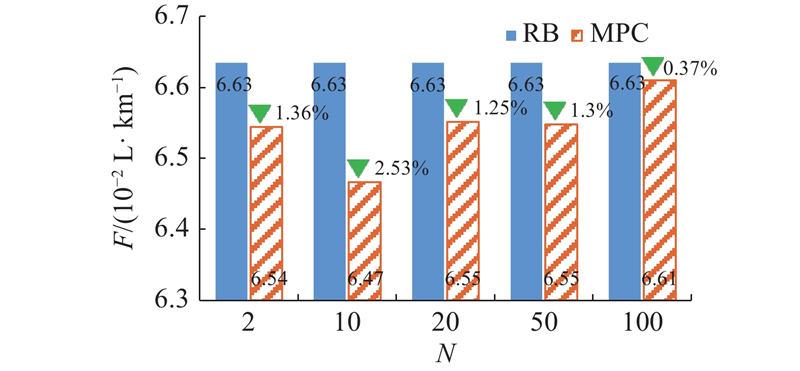
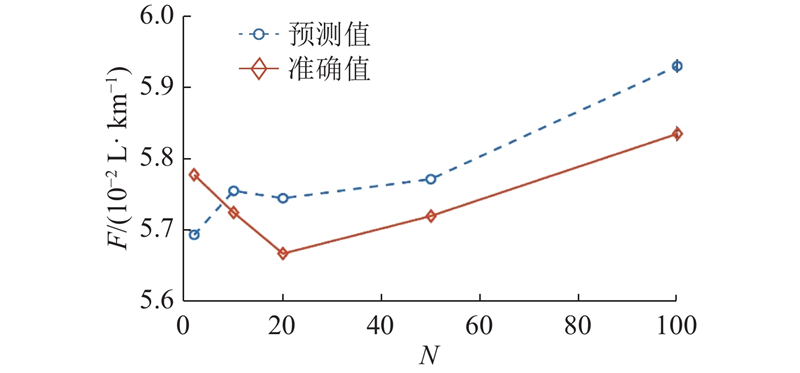
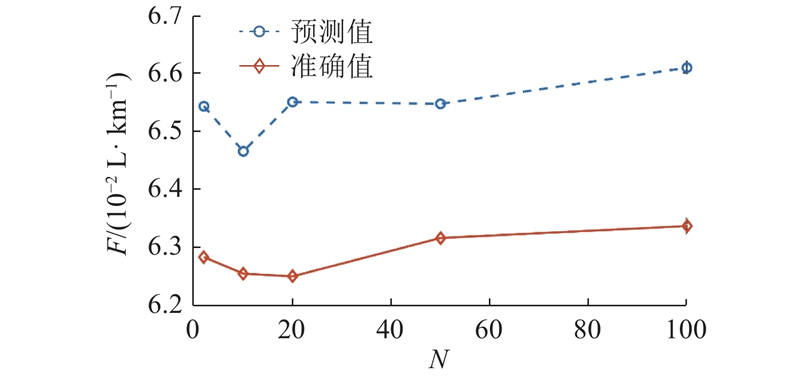
Abstract The linear-time varying model predictive control was proposed for the vehicle energy management control strategy based on the driver demand torque prediction aiming at the parallel hybrid electric vehicle. The driver’s demand torque in the next period was predicted according to the driver's demand torque in the previous period. The prediction accuracy of the autoregressive model within the 200 prediction step length is higher compared with the exponential function prediction method. The predicted speed sequence can be calculated from the predicted demand torque sequence according to the longitudinal dynamic formula. Then the vehicle model with nonlinear characteristics was transformed into a linear time-varying mode. The linear time-varying model predictive control algorithm was used to solve the problem. The model predictive control algorithm based on driver demand torque prediction was compared with the rule-based control algorithm and the model predictive control algorithm with known operating conditions. The comparison results show that the fuel economy of the model predictive control algorithm based on driver demand torque prediction is better under the three standard operating conditions of NEDC, UDDS and WLTC compared with the rule-based control algorithm, but there is room for improvement compared with the results of known operating condition.
|
|
Received: 02 July 2019
Published: 05 July 2020
|
|
|
|
Corresponding Authors:
Dao-fei LI
E-mail: dfli@zju.edu.cn
|
基于驾驶员需求转矩预测的模型预测控制能量管理
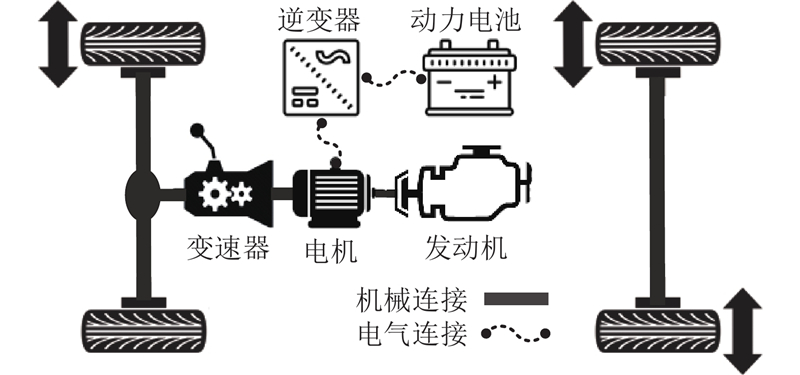
以并联式混合动力车辆为研究对象,基于驾驶员需求转矩预测,采用线性时变模型预测控制算法对对象车辆进行能量管理控制. 根据驾驶员前一段时间内的需求转矩,可以预测下一时段内驾驶员的需求转矩. 与指数函数预测方法相比,自回归模型在预测步长200步之内的预测准确度比指数函数高. 根据纵向动力学公式,可以由预测获得的需求转矩序列计算获得预测的车速序列;采用线性化处理的方法,将具有非线性特性的车辆模型转化成线性时变模型,采用线性时变模型预测控制算法进行求解;将基于驾驶员需求转矩预测的模型预测控制算法和基于规则的控制算法、工况已知的模型预测控制算法进行对比. 对比结果表明:基于驾驶员需求转矩预测的模型预测控制算法与基于规则的控制算法相比,在NEDC、UDDS和WLTC这3个标准工况下的燃油经济性均有所提高,但是与工况已知时的计算结果相比有提升的空间.
关键词:
并联式混合动力车辆,
驾驶员需求转矩预测,
能量管理控制,
线性时变模型预测控制
|
|
| [1] |
环境保护部国家质量监督检验检疫总局. 轻型汽车污染物排放限值及测量方法(中国第六阶段): GB18352.6-2016 [S/OL]. 2016-12-23. http://www.doc88.com/p-7038457360771.html.
|
|
|
| [2] |
JOHNSON V H, WIPKE K B, RAUSEN D J. HEV control strategy for real-time optimization of fuel economy and emission [C]//SAE International. Arlington: SAE, 2000: 1543.
|
|
|
| [3] |
ANBARAN S A, IDRIS N R N, JANNATI M, et al. Rule-based supervisory control of split-parallel hybrid electric vehicle [C]//Proceedings of the 2014 IEEE Conference on Energy Conversion. Johor Bahru: IEEE, 2014: 7?12.
|
|
|
| [4] |
MUSARDO C, RIZZONI G, GUEZENNEC Y, et al A-ECMS: an adaptive algorithm for hybrid electric vehicle energy management[J]. European Journal of Control, 2005, 11 (4/5): 509- 524
|
|
|
| [5] |
SEZER V, GOKASAN M, BOGOSYAN S A novel ECMS and combined cost map approach for high-efficiency series hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2011, 60 (8): 3557- 3570
doi: 10.1109/TVT.2011.2166981
|
|
|
| [6] |
KULIKOV I A, BAULINA E E, FILONOV A I. Optimal control of a hybrid vehicle's powertrain minimizing pollutant emissions and fuel consumption [C]//SAE 2014 Commercial Vehicle Engineering Congress. Illinois: SAE, 2014: 2372-2376.
|
|
|
| [7] |
KO J, KO S, SON H, et al Development of brake system and regenerative braking cooperative control algorithm for automatic-transmission-based hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2015, 64 (2): 431- 440
doi: 10.1109/TVT.2014.2325056
|
|
|
| [8] |
KIM N, CHA S, PENG H Optimal control of hybrid electric vehicles based on pontryagin’s minimum principle[J]. IEEE Transactions on Control Systems Technology, 2011, 19 (5): 1279- 1287
doi: 10.1109/TCST.2010.2061232
|
|
|
| [9] |
HUANG Y, WANG H, KHAJEPOUR A, et al Model predictive control power management strategies for HEVs: a review[J]. Journal of Power Sources, 2017, 341 (15): 91- 106
|
|
|
| [10] |
DI C S, WEI L, KOLMANOVSKY I V, et al Power smoothing energy management and its application to a series hybrid powertrain[J]. IEEE Transactions on Control Systems Technology, 2013, 21 (6): 2091- 2103
doi: 10.1109/TCST.2012.2218656
|
|
|
| [11] |
张洁丽. 基于模型预测控制的插电式混合动力客车能量管理策略研究[D]. 北京: 北京理工大学, 2016.
ZHANG Jie-li. Energy management strategy for a plug-in hybrid electric bus based on model predictive control [D]. Beijing: Beijing Institute of Technology, 2016.
|
|
|
| [12] |
BORHAN H, VAHIDI A, PHILLIPS A M, et al MPC-based energy management of a power-split hybrid electric vehicle[J]. IEEE Transactions on Control Systems Technology, 2012, 20 (3): 593- 603
doi: 10.1109/TCST.2011.2134852
|
|
|
| [13] |
SUN C, HU X, MOURA S J, et al Velocity predictors for predictive energy management in hybrid electric vehicles[J]. IEEE Transactions on Control Systems Technology, 2015, 23 (3): 1197- 1204
doi: 10.1109/TCST.2014.2359176
|
|
|
| [14] |
孙超. 混合动力汽车预测能量管理研究[D]. 北京: 北京理工大学, 2016.
SUN Chao. Predictive energy management of hybrid electric vehicle powertrains [D]. Beijing: Beijing Institute of Technology, 2016.
|
|
|
| [15] |
曾祥瑞, 黄开胜, 孟凡博 具有实时运算潜力的并联混合动力汽车模型预测控制[J]. 汽车安全与节能学报, 2012, 3 (2): 165- 172
ZENG Xiang-rui, HUANG Kai-sheng, MENG Fan-bo Model predictive control for parallel hybrid electric vehicles with potential real-time capability[J]. Automotive Safety and Energy, 2012, 3 (2): 165- 172
doi: 10.3969/j.issn.1676-8484.2012.02.010
|
|
|
| [16] |
庞中华, 崔红. 系统辨识与自适应控制MATLAB仿真[M]. 北京: 北京航空航天大学出版社, 2009: 36-46.
|
|
|
| [17] |
刘金琨, 沈晓蓉, 赵龙. 系统辨识理论及MATLAB仿真[M]. 北京: 电子工业出版社, 2013: 31-47.
|
|
|
| [18] |
IYAMA H, NAMERIKAWA T. Fuel consumption optimization for a power-split HEV via gain-scheduled model predictive control [C]//2014 53rd Annual Conference of the Society of Instrument and Control Engineers of Japan. Sapporo: IEEE, 2014.
|
|
|
| [19] |
XU Xiao-kang, PENG Jun, ZHANG Rui, et al Adaptive model predictive control for cruise control of high-speed trains with time-varying parameters[J]. Journal of Advanced Transportation, 2019, (5): 1- 11
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|