|
|
|
| Identification of improved friction model for robot based on hybrid genetic algorithm |
Tie ZHANG( ),Liang-liang HU,Yan-biao ZOU ),Liang-liang HU,Yan-biao ZOU |
| School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510640, China |
|
|
|
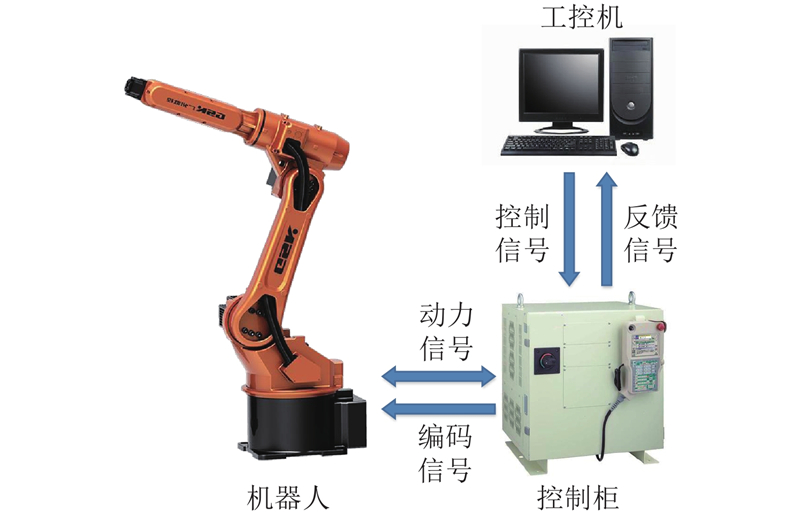
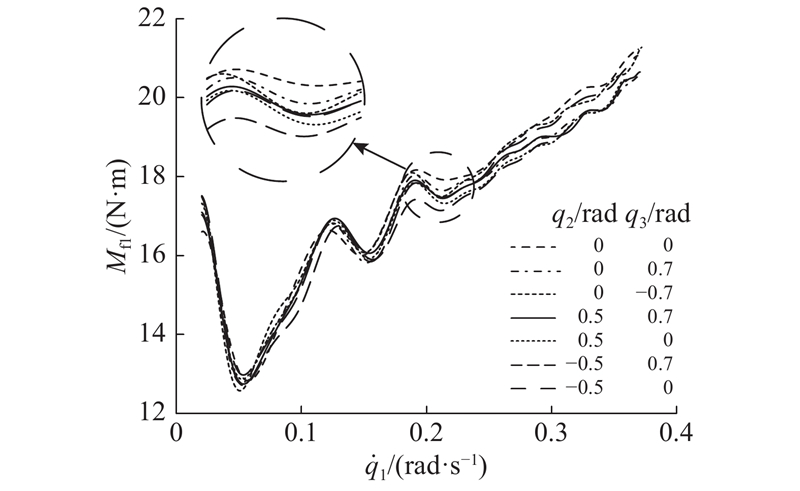
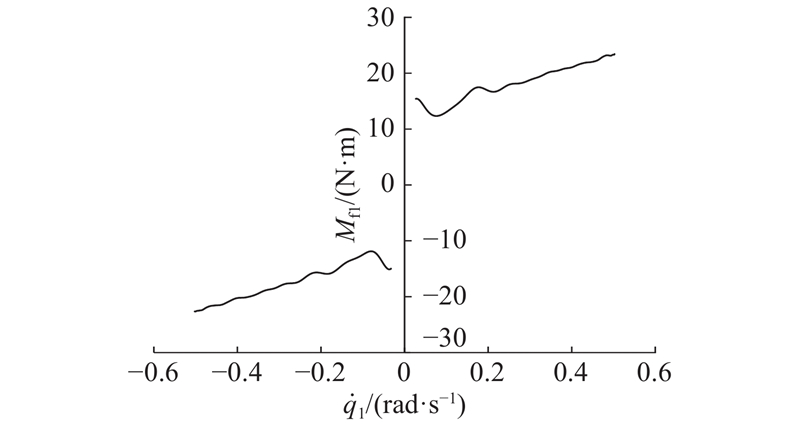
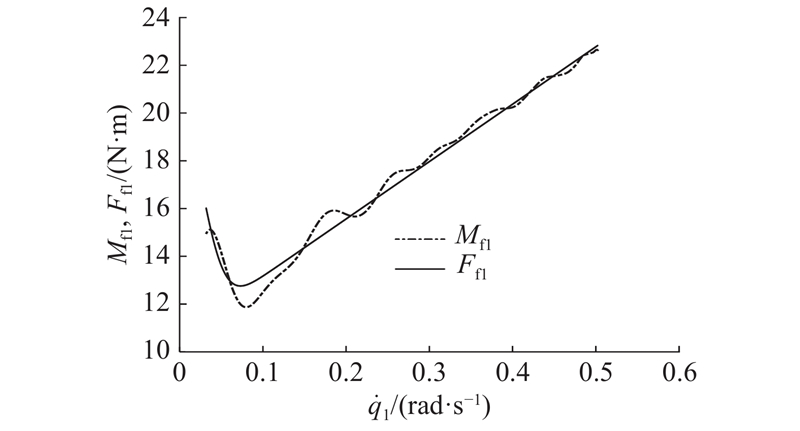
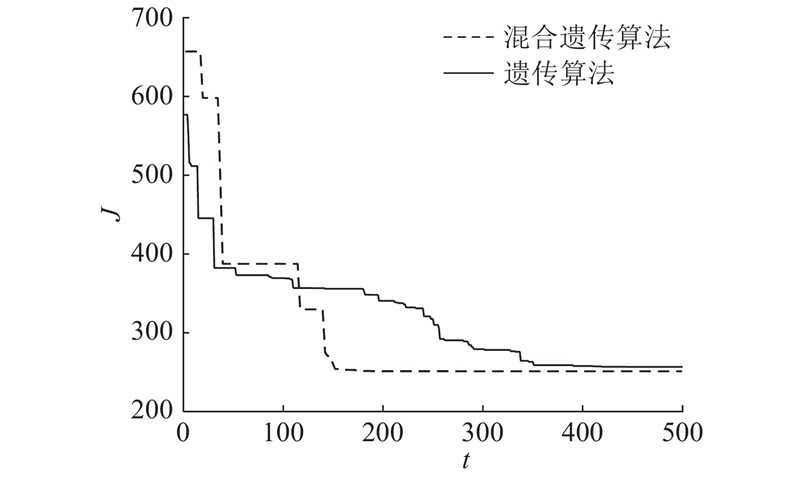
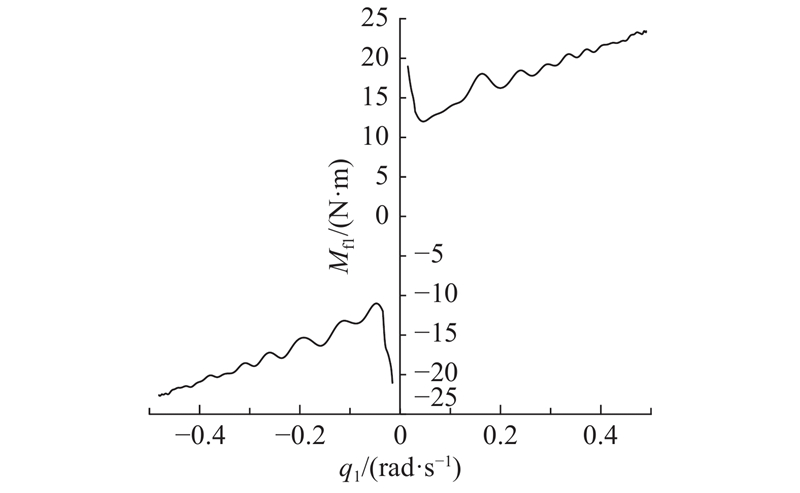
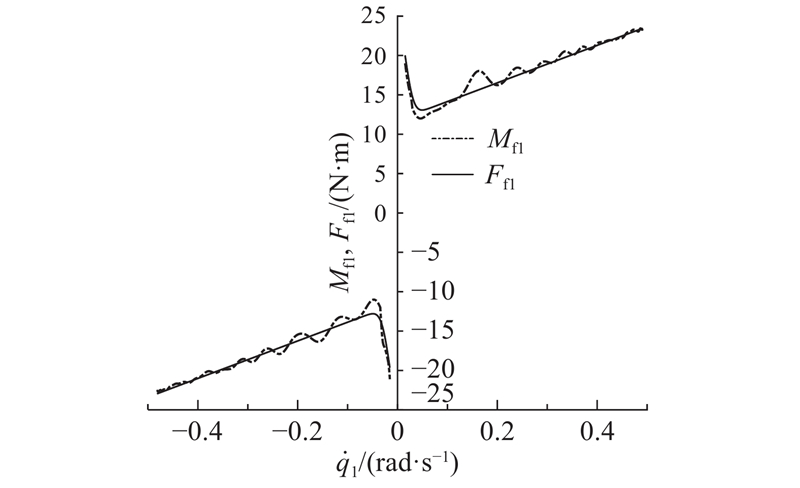
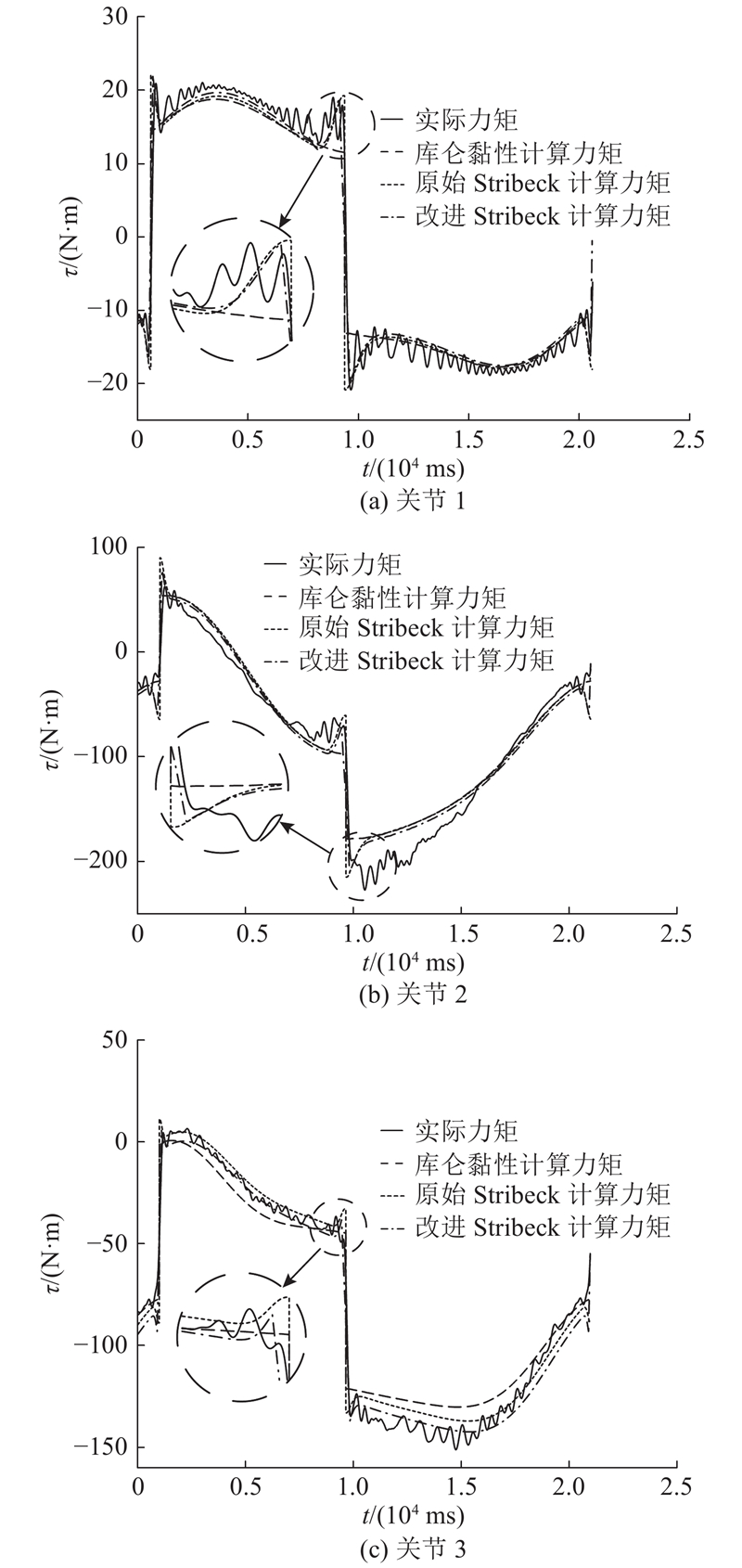
Abstract Aiming at the problem that the Coulomb and viscous friction model cannot really reflect the nonlinear characteristics of friction in the process of robot motion, an improved Stribeck friction model was used to describe the joint friction, and a method of model parameter identification based on the combination of hybrid genetic algorithm and cosine trajectory was proposed. First, different cosine trajectories were used to excite the robot joints, and the friction torque of the joints was determined using the known dynamic equations of the robot, so as to establish the mapping relationship between the robot joint velocity and the joint friction torque. Second, the simulated annealing hybrid genetic algorithm was used to identify the friction parameters. Finally, a multi-joint series robot was used as the research object, and the friction parameter identification experiments were carried out to verify the effectiveness of the proposed method. Experimental results indicate that compared with the traditional Coulomb and viscous friction model, the improved Stribeck friction model can reduce the calculation error of the joint torque by 17.7% to 33.6%, and can further improve the accuracy of the robot dynamic model.
|
|
Received: 28 June 2020
Published: 10 June 2021
|
|
|
| Fund: 国家科技重大专项资助项目(2015ZX04005006);广东省科技计划资助项目(2019B040402006);中山市科技重大专项资助项目(2016F2FC0006,2018A10018) |
基于混合遗传算法的机器人改进摩擦模型辨识
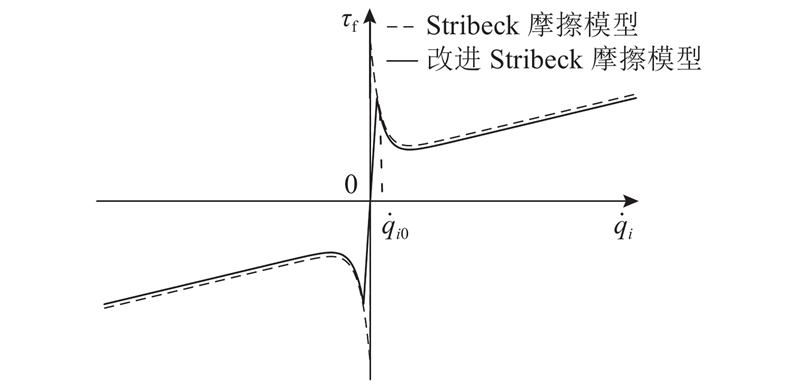
为了解决机器人运动过程中库伦+黏性摩擦模型不能真实反映关节摩擦的非线性特性的问题,采用改进Stribeck摩擦模型对机器人关节摩擦进行建模,提出基于混合遗传算法与余弦轨迹的模型参数辨识方法. 采用不同的余弦轨迹对机器人关节进行激励,利用已知的机器人动力学方程确定关节摩擦力矩,从而建立机器人关节速度与关节摩擦力矩之间的映射关系,并利用模拟退火混合遗传算法对摩擦参数进行辨识. 为了验证所提方法的有效性,以多关节串联型机器人为研究对象,进行摩擦参数辨识实验. 实验结果表明,与传统的库伦+黏性摩擦模型相比,改进的Stribeck摩擦模型可以减少17.7%~33.6%的关节力矩计算误差,并能够进一步提高机器人动力学模型的准确性.
关键词:
机器人动力学模型,
关节力矩,
Stribeck摩擦模型,
混合遗传算法,
参数辨识
|
|
| [1] |
LEE S D, AHN K H, SONG J B. Torque control based sensorless hand guiding for direct robot teaching [C]// 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Daejeon: IEEE, 2016: 745-750.
|
|
|
| [2] |
LEE S D, KIM M C, SONG J B. Sensorless collision detection for safe human-robot collaboration [C]// 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg: IEEE, 2015: 2392-2397.
|
|
|
| [3] |
GROTJAHN M, DAEMI M, HEIMANN B Friction and rigid body identification of robot dynamics[J]. International Journal of Solids and Structures, 2001, 38 (10?13): 1889- 1902
doi: 10.1016/S0020-7683(00)00141-4
|
|
|
| [4] |
HAMON P, GAUTIER M, GARREC P. Dynamic identification of robots with a dry friction model depending on load and velocity [C]// 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei: IEEE, 2010: 6187-6193.
|
|
|
| [5] |
吴文祥, 朱世强, 王宣银, 等 基于摩擦模糊建模与补偿的机器人低速控制[J]. 电机与控制学报, 2013, 17 (8): 70- 77
WU Wen-xiang, ZHU Shi-qiang, WANG Xuan-yin Slow motion control of serial robots with friction compensation based on fuzzy logic system[J]. Electric Machines and Control, 2013, 17 (8): 70- 77
|
|
|
| [6] |
IWASAWA S, OHISHI K, YOKOKURA Y, et al. Fine sensorless force control using Stribeck model for injection molding machine [C]// 10th France-Japan/8th Europe-Asia Congress on Mecatronics (MECATRONICS2014-Tokyo). Tokyo: IEEE, 2014: 201-206.
|
|
|
| [7] |
KERMANI M R, PATEL R V, MOALLEM M Friction identification and compensation in robotic manipulators[J]. IEEE Transactions on Instrumentation and Measurement, 2007, 56 (6): 2346- 2353
doi: 10.1109/TIM.2007.907957
|
|
|
| [8] |
HENSEN R, MOLENGRAFT M, STEINBUCH M Friction induced hunting limit cycles: a comparison between the LuGre and switch friction model[J]. Automatica, 2003, 39 (12): 2131- 2137
doi: 10.1016/S0005-1098(03)00234-6
|
|
|
| [9] |
ARMSTRONG-HELOUVRY B. Control of machines with friction [M]. Berlin: Springer Science and Business Media, 2012.
|
|
|
| [10] |
MARTON L, LANTOS B Modeling, identification, and compensation of stick-slip friction[J]. IEEE Transactions on Industrial Electronics, 2007, 54 (1): 511- 521
doi: 10.1109/TIE.2006.888804
|
|
|
| [11] |
VAKIL M, FOTOUHI R, NIKIFORUK P N Energy-based approach for friction identification of robotic joints[J]. Mechatronics, 2011, 21 (3): 614- 624
doi: 10.1016/j.mechatronics.2010.12.007
|
|
|
| [12] |
KENNEDY C, DESAI J P Modeling and control of the Mitsubishi PA-10 robot arm harmonic drive system[J]. IEEE-ASME Transactions on Mechatronics, 2005, 10 (3): 263- 274
doi: 10.1109/TMECH.2005.848290
|
|
|
| [13] |
孙洪鑫, 王修勇, 陈政清. 辩识LuGre摩擦模型参数的2种智能算法 [C]// 第五届全国电磁流变液及其应用学术会议. 大连: 大连理工大学电子音像出版社, 2008: 1-6.
SUN Hong-xin, WANG Xiu-yong, CHEN Zheng-qing. Two intelligent algorithms of LuGrefriction model for parameter identification [C]// The 5th National Conference on Electro-rheological Fluids and Magnetorheological Suspensions. Dalian: Electronic and Audiovisual Press of Dalian University of Technology, 2008: 1-6.
|
|
|
| [14] |
CRAI G, JOHN J. Introduction to Robotics: Mechanics and Control [M]. New York: Pearson Education, Inc, 1986.
|
|
|
| [15] |
KHALIL W, DOMBRE E. Modeling, identification and control of robots [M]. Oxford: Butterworth-Heinemann, 2004.
|
|
|
| [16] |
吴文祥, 朱世强, 靳兴来 基于改进傅里叶级数的机器人动力学参数辨识[J]. 浙江大学学报: 工学版, 2013, 47 (2): 231- 237
WU Wen-xiang, ZHU Shi-qiang, JIN Xing-lai Dynamic identification for robot manipulators based on modified Fourier series[J]. Journal of Zhejiang University: Engineering Science, 2013, 47 (2): 231- 237
|
|
|
| [17] |
KHALIL W, GAUTIER M, LEMOINE P. Identification of the payload inertial parameters of industrial manipulators [C]// Proceedings 2007 IEEE International Conference on Robotics and Automation. Rome: IEEE, 2007: 4943-4948.
|
|
|
| [18] |
SOUSA C D, CORTESAO R Physical feasibility of robot base inertial parameter identification: a linear matrix inequality approach[J]. The International Journal of Robotics Research, 2014, 33 (6): 931- 944
doi: 10.1177/0278364913514870
|
|
|
| [19] |
ARMSTRONG-HELOUVRY B. Stick-slip arising from Stribeck friction [C]// Proceedings, IEEE International Conference on Robotics and Automation. Cincinnati: IEEE, 1990: 1377-1382.
|
|
|
| [20] |
HONG H Research on the parameter identification of friction model for servo systems based on genetic algorithms[J]. Systems Engineering and Electronics, 2003, 2 (1): 1116- 1120
|
|
|
| [21] |
SRINIVAS M, PATNAIK L M Adaptive probabilities of crossover and mutation in genetic algorithms[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1994, 24 (4): 656- 667
doi: 10.1109/21.286385
|
|
|
| [22] |
任子武, 伞冶 实数遗传算法的改进及性能研究[J]. 电子学报, 2007, 35 (2): 269- 274
REN Zi-wu, SAN Ye Improvement of real-valued genetic and performance study[J]. Acta Electronica Sinica, 2007, 35 (2): 269- 274
|
|
|
| [23] |
METROPOLIS N, ROSENBLUTH A W, ROSENBLUTH M N, et al Equation of state calculations by fast computing machines[J]. The Journal of Chemical Physics, 1953, 21 (6): 1087- 1092
doi: 10.1063/1.1699114
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|