| 机械与能源工程 |
|

|
|
|
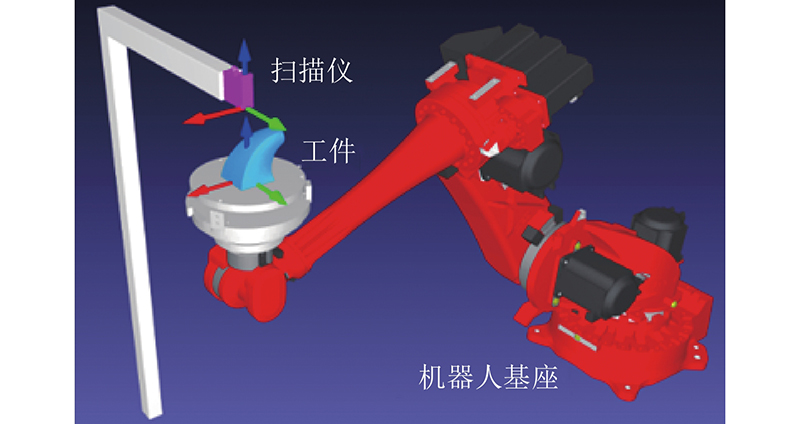
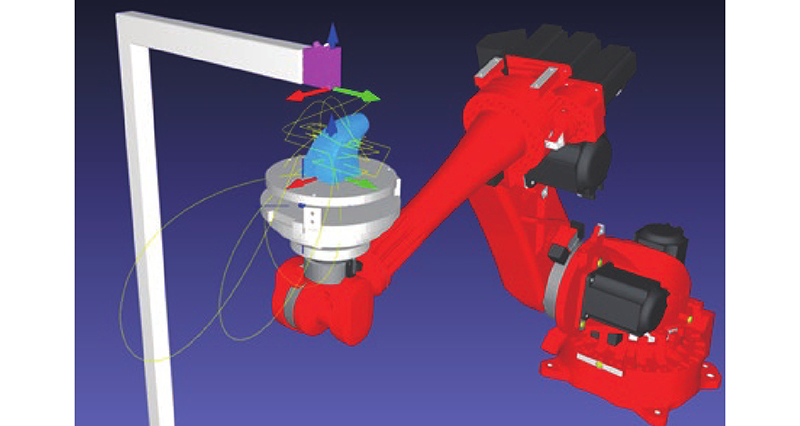
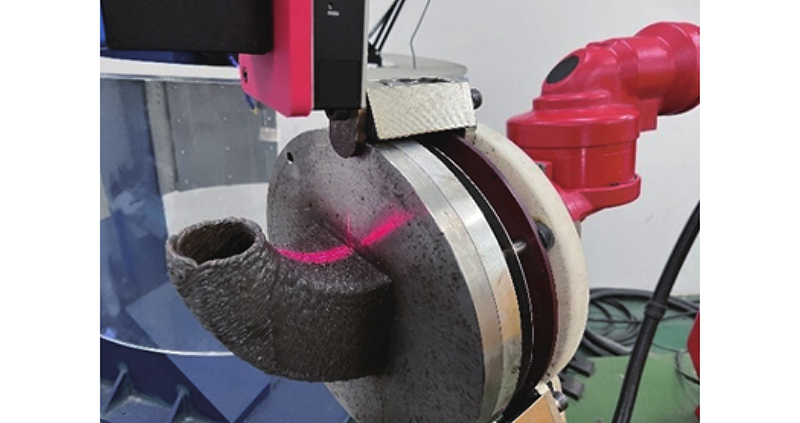
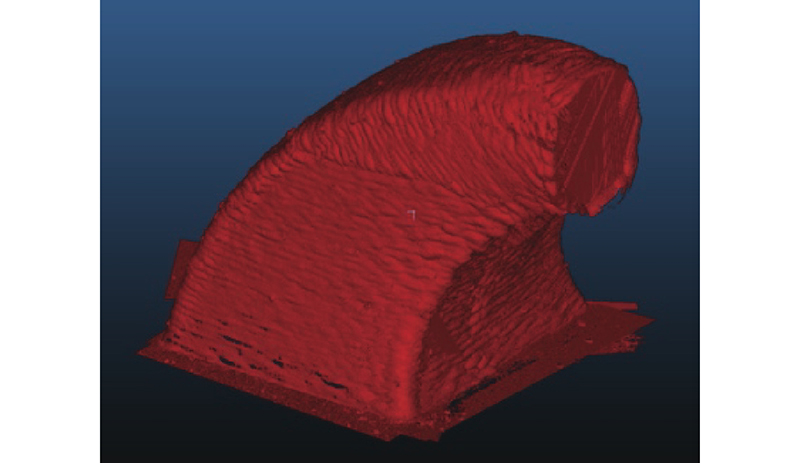
| 面向电弧增材的单线激光扫描路径规划 |
靳佳澳1,2( ),沈洪垚1,2,*(),孙扬帆1,2,林嘉浩1,2,陈静霓1,2 ),沈洪垚1,2,*(),孙扬帆1,2,林嘉浩1,2,陈静霓1,2 |
1. 浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州 310027
2. 浙江大学 浙江省三维打印工艺与装备重点实验室,浙江 杭州 310027 |
|
| Single-line laser scanning path planning for wire arc and additive manufacturing |
| Jia-ao JIN1,2(),Hong-yao SHEN1,2,*(),Yang-fan SUN1,2,Jia-hao LIN1,2,Jing-ni CHEN1,2 |
1. State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China
2. Key Laboratory of 3D Printing Process and Equipment of Zhejiang Province, Zhejiang University, Hangzhou 310027, China |
引用本文:
靳佳澳,沈洪垚,孙扬帆,林嘉浩,陈静霓. 面向电弧增材的单线激光扫描路径规划[J]. 浙江大学学报(工学版), 2023, 57(1): 21-31.
Jia-ao JIN,Hong-yao SHEN,Yang-fan SUN,Jia-hao LIN,Jing-ni CHEN. Single-line laser scanning path planning for wire arc and additive manufacturing. Journal of ZheJiang University (Engineering Science), 2023, 57(1): 21-31.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2023.01.003
或
https://www.zjujournals.com/eng/CN/Y2023/V57/I1/21
|
| 1 |
SINGH S, SHARMA K S, RATHOD W D A review on process planning strategies and challenges of WAAM[J]. Materials Today: Proceedings, 2021, 47 (19): 6564- 6575
|
| 2 |
SINGH R S, KHANNA P Wire arc additive manufacturing (WAAM): a new process to shape engineering materials[J]. Materials Today: Proceedings, 2021, 44 (1): 118- 128
|
| 3 |
WU Bin-tao, PAN Zeng-xi, DING Dong-hong, et al A review of the wire arc additive manufacturing of metals: properties, defects and quality improvement[J]. Journal of Manufacturing Processes, 2018, 35 (1): 127- 139
|
| 4 |
李友浩. 基于线结构光的电弧增材制造熔积层形貌三维测量[D]. 武汉: 华中科技大学, 2016.
LI You-hao. Deposition layer’s 3d measurement of arc-based additive manufacturing based on line-structured light [D]. Wuhan: Huazhong University of Science and Technology, 2016.
|
| 5 |
DING Dong-hong, PAN Zeng-xi, CUIURI D, et al Wire-feed additive manufacturing of metal components: technologies, developments and future interests[J]. The International Journal of Advanced Manufacturing Technology, 2015, 81 (1): 465- 481
|
| 6 |
SINGH P, DUTTA D. Multi-direction layered deposition: an overview of process planning methodologies [EB/OL]. [2003-01-01]. http://dx.doi.org/10.26153/tsw/5563.
|
| 7 |
LIU Bing, SHEN Hong-yao, DENG Rong-xin, et al Research on a planning method for switching moments in hybrid manufacturing processes[J]. Journal of Manufacturing Processes, 2020, 56 (A): 786- 795
|
| 8 |
RAUT L P, TAIWADE R V Wire arc additive manufacturing: a comprehensive review and research directions[J]. Journal of Materials Engineering and Performance, 2021, 30 (1): 4768- 4791
|
| 9 |
杜军, 马琛, 魏正英 基于视觉传感的铝合金电弧增材沉积层形貌动态响应[J]. 浙江大学学报: 工学版, 2020, 54 (8): 1481- 1489
DU Jun, MA Chen, WEI Zheng-ying Dynamic response of surface morphology of aluminum (Al) deposited layers in wire and arc additive manufacturing based on visual sensing[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (8): 1481- 1489
|
| 10 |
BAI X W, ZHANG H O, WANG G L Improving prediction accuracy of thermal analysis for weld-based additive manufacturing by calibrating input parameters using IR imaging[J]. The International Journal of Advanced Manufacturing Technology, 2013, 69 (1): 1087- 1095
|
| 11 |
KARUNAKARAN P K, SURYAKUMAR S, PUSHPA V, et al Low cost integration of additive and subtractive processes for hybrid layered manufacturing[J]. Robotics and Computer-Integrated Manufacturing, 2010, 26 (5): 490- 499
doi: 10.1016/j.rcim.2010.03.008
|
| 12 |
SHEN Hong-yao, JIN Jia-ao, LIU Bing, et al Measurement and evaluation of laser-scanned 3D profiles in wire arc hybrid manufacturing processes[J]. Measurement, 2021, 176: 109089
doi: 10.1016/j.measurement.2021.109089
|
| 13 |
DING Li-jun, DAI Shu-guang, MU Ping-an. CAD-based path planning for 3d laser scanning of complex surface [C]// 2nd International Conference on Intelligent Computing, Communication and Convergence. Odisha: Elsevier, 2016: 526–535.
|
| 14 |
LARSSON S, KJELLANDER A P J Path planning for laser scanning with an industrial robot[J]. Robotics and Autonomous Systems, 2008, 56: 615- 624
doi: 10.1016/j.robot.2007.10.006
|
| 15 |
PHAN D M N, QUINSAT Y, LAVERNHE S, et al Path planning of a laser-scanner with the control of overlap for 3d part inspection[J]. Procedia CIRP, 2018, 67: 392- 397
doi: 10.1016/j.procir.2017.12.231
|
| 16 |
LARTIGUE C, QUINSAT Y, CHARYAR M S, et al Voxel-based path planning for 3d scanning of mechanical parts[J]. Computer-Aided Design and Applications, 2014, 11 (2): 220- 227
doi: 10.1080/16864360.2014.846096
|
| 17 |
艾小祥, 俞慈君, 方强, 等 基于遗传算法的机翼壁板扫描路径优化[J]. 浙江大学学报: 工学版, 2015, 49 (3): 448- 456
AI Xiao-xiang, YU Ci-jun, FANG Qiang, et al Optimized scanning path of wing panel based on genetic algorithm[J]. Journal of Zhejiang University: Engineering Science, 2015, 49 (3): 448- 456
|
| 18 |
YANG Yi-peng, LI Zhao-ting, YU Xing-hu, et al A trajectory planning method for robot scanning system using mask R-CNN for scanning objects with unknown model[J]. Neurocomputing, 2020, 404: 329- 339
doi: 10.1016/j.neucom.2020.04.059
|
| 19 |
刘阳. 基于激光感知的喷涂机器人智能编程算法研究与软件开发[D]. 南京: 东南大学, 2018.
LIU Yang. Research on intelligent programming algorithm and software development of painting robot based on laser sensing [D]. Nanjing: Southeast University, 2018.
|
| 20 |
王鹏. 线结构光三维自动扫描系统关键技术的研究[D]. 天津: 天津大学, 2008.
WANG Peng. Study on key techniques for automatic 3d structured-light scanning system [D]. Tianjin: Tianjin University, 2008.
|
| 21 |
张晓蕾. 基于动态路径规划的三维扫描方法研究[D]. 大连: 大连理工大学, 2017.
ZHANG Xiao-lei. The research of 3d scanning method based on dynamic path planning [D]. Dalian: Dalian University of Technology, 2017.
|
| 22 |
王朝. 结合机器视觉路径规划的激光三角法零件精密测量系统研究[D]. 武汉: 华中科技大学, 2019.
WANG Chao. Research of high precision measurement system for laser triangulation method combined with machine vision path planning [D]. Wuhan: Huazhong University of Science and Technology, 2019.
|
| 23 |
MAHMUDA M, JOANNICB D, ROY M, et al 3D part inspection path planning of a laser scanner with control on the uncertainty[J]. Computer-Aided Design, 2011, 43 (4): 345- 355
doi: 10.1016/j.cad.2010.12.014
|
| 24 |
DONG Zhi-xu, SUN Xing-wei, LIU Wei-jun, et al Measurement of free-form curved surfaces using laser triangulation[J]. Sensors, 2018, 18 (10): 3527
doi: 10.3390/s18103527
|
| 25 |
SON S, LEE K H. Automated scan plan generation using STL meshes for 3D stripe-type laser scanner [C]// Computational Science and Its Applications. Germany: Springer, 2003: 424–435.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|