混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点。相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等。混联机构的混联方式有并-串型、串-并型和并-并型三种。前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] 。针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] 。这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点。为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题。隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景。
多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析。常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等。这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来。为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合。其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合。瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系。利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析。
上述研究表明:FIS理论在分析具有复杂构型特征的机构时优势显著。基于此,本文以FIS理论为理论框架,对一类具有多体节叠加特征的混联机构开展正运动学建模和优化设计研究。首先,描述并总结混联机构的多体节叠加构型特征,通过引入装配夹角对应的有限旋量项来确定其多体节运动叠加传递原理。然后,推导该机构在体节数为任意正整数时均成立的正运动学模型和速度雅可比矩阵,并进行仿真验证。接着,利用响应面法建立机构性能指标的代理模型,并利用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,非支配排序遗传算法-Ⅱ)对机构的尺寸参数进行多目标优化,得到Pareto前沿。最后,通过熵权-逼近理想解排序法在Pareto前沿中选择最优方案,并设计制作实物样机,以验证优化方案的可行性。
1 混联机构构型分析
1.1 构型描述
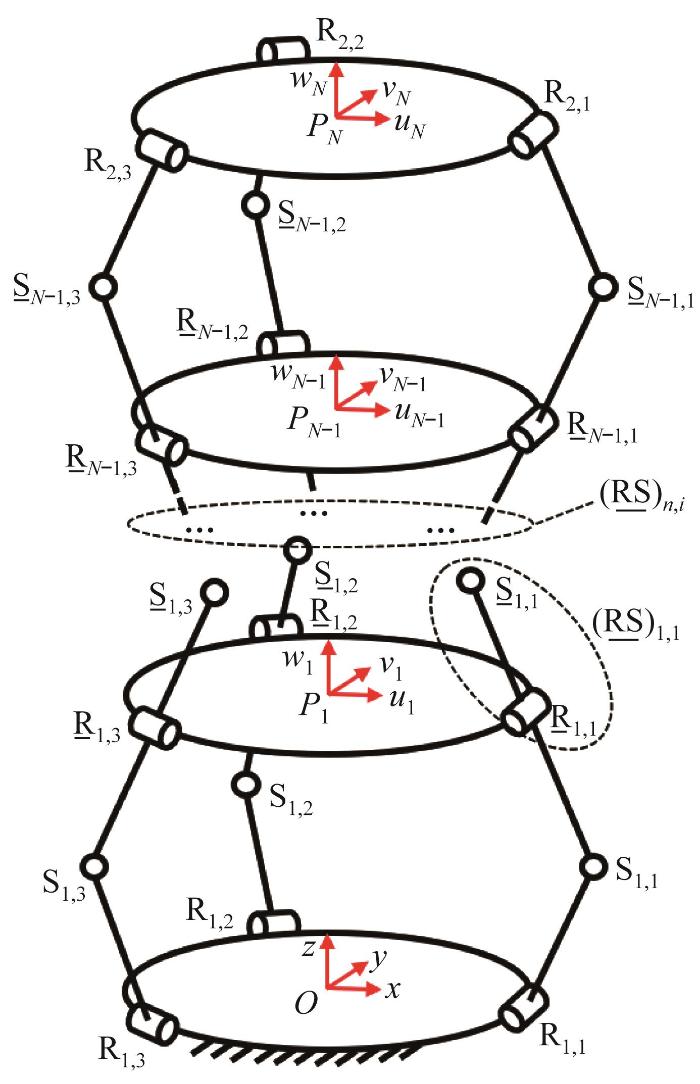
本文所研究的多体节叠加型混联机构如图1 所示。该机构是一种特殊的三支链多平台混联机构,其构型与体节数相关。当体节数不同时,机构呈现出不同的构型。以静平台(基座)→末端动平台作为体节叠加的正方向,则该机构的构型可描述为3-R1 S(RS) N -1 R2 。其中,N 为正整数,表示机构中的动平台数(即体节数)。支链R1 S(RS) N -1 R2 中各符号的含义如下:R1 表示安装在机构静平台上的转动关节,R2 表示安装在末端动平台上的转动关节,S表示与R1 相邻的球关节;(RS) N -1 表示N -1个(RS)结构首尾相接形成的支链段,R表示安装在中间平台上的转动关节,S表示安装在中间平台上的球关节,位于转动关节R之后。
图1
图1
3-R1 S(RS) N - 1 R2
Fig.1
Schematic diagram of 3-R1 S(RS) N -1 R2 hybrid mechanism
当N =1时,支链中不存在(RS)结构,此时机构的构型变为3-R1 SR2 并联机构。由此可知,3-R1 S(RS) N -1 R2 混联机构的构型可看作:N 个3-RSR并联机构作为N 段体节,通过共用1个运动平台(前一体节的动平台为后一体节的静平台)和3个R关节的方式进行N -1次叠加获得的多体节叠加型混联机构。3-R1 S(RS) N -1 R2 混联机构共用的运动平台和R关节如图1 所示。为便于区分体节和支链,代表各运动关节字母的右下角标的第2个数字表示机构的第i 条支链。
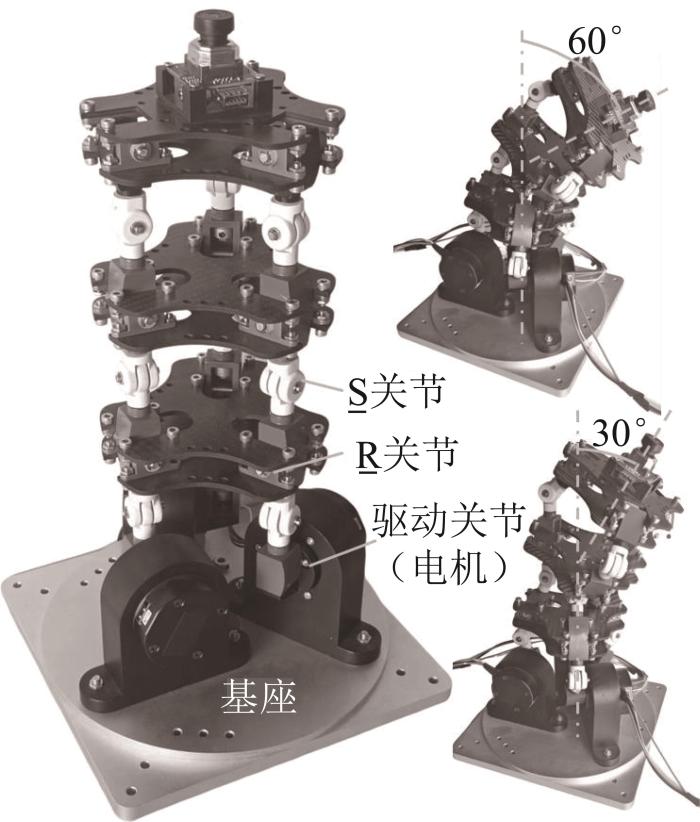
当体节数N =3时,3-R1 S(RS) N -1 R2 混联机构的实物样机如图2 所示。当以与静平台相连的R1, i z 轴的平动自由度以及绕x 、y 轴的转动自由度)。鉴于该机构的多体节叠加特征,各体节动平台的姿态角随体节数N 的增大而逐层叠加,从而使机构的末端动平台可在x 、y 方向上实现较大的姿态角。
图2
图2
3-R1 S(RS) N - 1 R2 N =3
Fig.2
3-R1 S(RS) N -1 R2 hybrid mechanism prototype (N =3)
1.2 多体节运动叠加传递原理
为明确多体节叠加特征对混联机构运动特性的影响,需对机构构型的拓扑结构进行深入分析。基于FIS理论,并联机构动平台的有限运动为其支链有限旋量的交集,如式(1)所示;支链的有限运动为各关节有限运动的合成,可用有限旋量的螺旋三角积表示,如式(2)所示。其中: S f, M 表示并联机构动平台的有限旋量, S f, L, i i 条支链的有限旋量, S f, j , i i 条支链中第j 个关节的有限旋量;Δ 1 ]。
S f , M = S f , L , i ⋂ S f , L , i - 1 ⋂ ⋯ ⋂ S f , L , 1 (1)
S f , L , i = S f , j , i Δ S f , j - 1 , i Δ ⋯ Δ S f , 1 , i (2)
基于式(2),按照由机构静平台到末端动平台的方向进行角标的顺序标注。当体节数为N 时,支链R1 S(RS) N -1 R2 对应的有限旋量表达式为:
S f , R 1 S R S ̲ N - 1 R 2 , i = S f , R 2 , i Δ S f , S ̲ N - 1 , i Δ S f , R ̲ N - 1 , i Δ ⋯ Δ S f , S ̲ 1 , i Δ S f , R ̲ 1 , i Δ S f , S , i Δ S f , R 1 , i (3)
式中: S f, X , i i 条R1 S(RS) N -1 R2 支链中对应关节的有限旋量,X 表示不同关节。
S关节可视作3个轴线相交但方向不同的R关节(记为Ra 、Rb 、Rc ),则R关节和S关节的有限旋量分别表示为:
S f , R , i = 2 t a n θ R 2 s R r R × s R (4)
S f , S , i = S f , R a , i Δ S f , R b , i Δ S f , R c , i = 2 t a n θ R a 2 s R a r R a × s R a Δ 2 t a n θ R b 2 s R b r R b × s R b Δ 2 t a n θ R c 2 s R c r R c × s R c (5)
式中: s R 表示R关节轴线方向对应的单位向量, r R 表示机构末端指向R关节轴线的向量,θ R 表示R关节的转动角度。
相邻两体节的同位支链共用运动平台和R关节,导致前一体节的随动RS杆与后一体节的主动RS杆本质上为同一杆件(SRS杆),但存在一定的装配夹角。考虑到装配夹角对混联机构运动叠加传递的影响,在相邻体节共用的R关节处引入虚拟关节R′ n -1 ,即在Rn -1 关节和Sn -2 关节的有限旋量之间引入如下转动项:
S f , R ̲ n - 1 ' , i = 2 t a n θ R ̲ n - 1 ' , i 2 s R ̲ n - 1 , i r R ̲ n - 1 , i × s R ̲ n - 1 , i (6)
θ R ̲ n - 1 ' , i = 2 π - ω R ̲ n - 1 , i - θ R ̲ n - 1 , i (7)
式中:ω R ̲ n - 1 , i θ R ̲ n - 1 , i
将式(6)代入式(3)中的相应位置,结合各体节中运动平台的位置和式(1)可知,3-R1 S(RS) N -1 R2 混联机构末端动平台对应的有限旋量可表示为3条支链有限旋量的交集:
S f , 3 - R 1 S R S ̲ N - 1 R 2 = S f , R 1 S R S ̲ N - 1 R 2 , 3 ⋂ S f , R 1 S R S ̲ N - 1 R 2 , 2 ⋂ S f , R 1 S R S ̲ N - 1 R 2 , 1 = S f , 3 - R S R , N Δ S f , 3 - R S R , N - 1 Δ ⋯ Δ S f , 3 - R S R , n Δ ⋯ Δ S f , 3 - R S R , 1 (8)
式中:S f , 3 - R S R , n n 个体节的有限旋量。
当体节数N 取不同数值时,S f , 3 - R S R , n n =1, 2,…, N )的表达式如下:
S f , 3 - R S R , n = S f , R ̲ n - 1 , 3 Δ S f , S ̲ n - 2 , 3 Δ S f , R ̲ n - 2 ' , 3 ⋂ S f , R ̲ n - 1 , 2 Δ S f , S ̲ n - 2 , 2 Δ S f , R ̲ n - 2 ' , 2 ⋂ S f , R ̲ n - 1 , 1 Δ S f , S ̲ n - 2 , 1 Δ S f , R ̲ n - 2 ' , 1 , n ≠ 1 , N S f , R 2 , 3 Δ S f , S ̲ N - 1 , 3 Δ S f , R ̲ N - 1 ' , 3 ⋂ S f , R 2 , 2 Δ S f , S ̲ N - 1 , 2 Δ S f , R ̲ N - 1 ' , 2 ⋂ S f , R 2 , 1 Δ S f , S ̲ N - 1 , 1 Δ S f , R ̲ N - 1 ' , 1 , n = N S f , R ̲ 1 , 3 Δ S f , S , 3 Δ S f , R 1 , 3 ⋂ S f , R ̲ 1 , 2 Δ S f , S , 2 Δ S f , R 1 , 2 ⋂ S f , R ̲ 1 , 1 Δ S f , S , 1 Δ S f , R 1 , 1 , n = 1
式(8)揭示了3-R1 S(RS) N -1 R2 混联机构的多体节运动叠加传递原理,即对于具有N 个动平台的3-R1 S(RS) N -1 R2 机构,其末端动平台的有限运动为N 个3-RSR体节有限运动的叠加传递,可利用多个体节有限运动的顺序螺旋三角积进行计算。相邻体节间的运动参数按式(7)所示的数值关系逐层关联,将驱动R关节的输入运动与末端动平台的输出运动相联系,以形成正向映射,可用于构建机构的正运动学模型。
2 混联机构正运动学建模
2.1 单体节正运动学模型
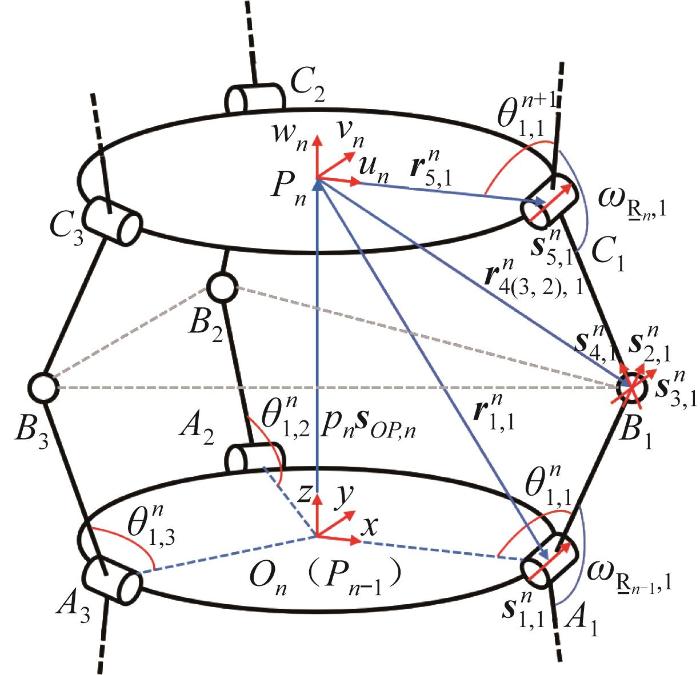
第n 个3-RSR体节的机构简图如图3 所示。设该机构的支链沿平台周向均布,即3条支链绕平台中心间隔120°装配,则图3 中R关节轴线的单位方向向量s j , i n r 5 , i n
s 1 , 3 n = R z 2 π / 3 s 1 , 2 n = R z 4 π / 3 s 1 , 1 n s 5 , 3 n = R w 2 π / 3 s 5 , 2 n = R w 4 π / 3 s 5 , 1 n r 5 , 3 n = R w 2 π / 3 r 5 , 2 n = R w 4 π / 3 r 5 , 1 n (9)
式中: R z φ z 轴的旋转矩阵, R w φ w 轴的旋转矩阵。因r 2 , i n r 3 , i n r 2 , i n = r 3 , i n = r 4 , i n
图3
图3
单体节3-RSR 机构示意图
Fig.3
Schematic diagram of single-segment 3-RSR mechanism
由3-RSR并联机构的运动特性可知,其动平台的有限旋量可表示为:
S f , 3 - R S R , n = 0 p n s O P , n Δ 2 t a n ϕ 1 , n 2 s 1 n r n × s 1 n Δ 2 t a n ϕ 2 , n 2 s 2 n r n × s 2 n Δ 2 t a n ϕ 3 , n 2 s 3 n r n × s 3 n (10)
式中:s O P , n On 指向其动平台中心Pn 的单位方向向量;pn 表示线段On Pn 在机构由参考位形变换为当前位形过程中的长度变化量,即平移距离; r n Pn 指向参考坐标系原点的向量;s i n i =1, 2, 3)表示动平台中心Pn 在空间内旋转的方向向量;ϕ i , n i = 1 , 2 , 3 n 个动平台由参考位姿变换到当前位姿过程中绕s i n ϕ i , n
鉴于3-R1 S(RS) N -1 R2 混联机构包含较多的同构型体节和重复支链,出于简化运动学建模和模块化设计的考虑,本文设各3-RSR体节的动、静平台半径相等且6根RS杆的尺寸完全一致,即有:
r 54 , i n = r 5 , i n - r 4 , i n = r 2 , i n - r 1 , i n = r 21 , i n = l n p n s O P , n + r 1 , 1 n = p n s O P , n + r 1 , 2 n = p n s O P , n + r 1 , 3 n = d r 5 , 1 n = r 5 , 2 n = r 5 , 3 n = d
式中:ln 表示各3-RSR体节中RS杆的长度,d 表示动、静平台的半径。
在上述尺寸条件下,3-RSR体节具有如下几何特性:
1)静平台中心指向动平台中心的单位方向向量s O P , n z 轴的夹角α n s O P , n w 轴夹角β n β n = 2 α n
2)动平台的姿态可用z -y -z 型欧拉角定义,即先绕z 轴转动φ y 轴转动β z 轴转动- φ r n 0 ,则式(10)可改写为:
S f , 3 - R S R = 0 p n s O P , n Δ 2 t a n - φ n 2 s z n 0 Δ 2 t a n β n 2 s y n 0 Δ 2 t a n φ n 2 s z n 0 (11)
式中:s y n s z n z 轴的方向向量和经一次旋转后y 轴的方向向量。
3)动平台中心的位置与姿态之间存在耦合关系,由静平台中心On 指向动平台中心Pn 的向量可表示为:
O n P n ⃗ = p n s O P , n = p n s i n α n c o s φ n s i n α n s i n φ n c o s α n T
p n = O n P n ⃗
4)3个S关节的中心所形成的平面B 1 B 2 B 3 垂直于平分线段On Pn ,且静平台所在平面A 1 A 2 A 3 与动平台所在平面C 1 C 2 C 3 相对于平面B 1 B 2 B 3 镜像对称。
5)静平台R关节的转动角度与动平台R关节的转动角度大小相同、方向相反,对应的转动角度存在如下微分关系:d θ 5 , i n = - d θ 1 , i n
限于篇幅,本文只给出运动学求解思路和最终求解结果。首先,求解3个S关节中心所构成平面B 1 B 2 B 3 的单位法向量。基于动、静平台关于该平面镜像对称的特性,平面B 1 B 2 B 3 的单位法向量即为线段On Pn (Pn -1 Pn )的单位方向向量s O P , n On 点与平面B 1 B 2 B 3 间距离的2倍即为线段On Pn 的长度p n α n φ n β n = 2 α n 式(12)所示。
s O P , n = - e 1 l n e 5 e 3 - l n e 6 e 4 - e 2 T e 1 2 + l n e 5 e 3 - l n e 6 e 4 2 + e 2 2 p n = 2 e 1 d - l n c θ 1 , 1 + l n s θ 1 , 1 e 2 e 2 2 + e 1 2 + l n e 5 e 3 - l n e 6 e 4 2 φ n = a r c t a n l n e 5 e 3 - l n e 6 e 4 e 1 β n = - 2 a r c t a n e 1 2 + l n e 5 e 3 - l n e 6 e 4 2 e 2 (12)
e 1 = 3 2 l n d - l n c θ 1 , 2 e 6 + 3 2 l n d - l n c θ 1 , 3 e 5 e 2 = 3 2 d - l n c θ 1 , 2 e 3 + 3 2 l n d - l n c θ 1 , 3 e 4 e 3 = l n c θ 1 , 1 - 3 2 d + l n 2 c θ 1 , 3 e 4 = l n c θ 1 , 1 - 3 2 d + l n 2 c θ 1 , 2 e 5 = s θ 1 , 1 - s θ 1 , 2 e 6 = s θ 1 , 1 - s θ 1 , 3
式中:c θ 1 , i s θ 1 , i c o s θ 1 , i s i n θ 1 , i
式(12)即为单体节3-RSR机构的正运动学模型,将其代入式(11),可进一步将单体节正运动学模型推广至多体节叠加的正运动学模型。
2.2 多体节叠加正运动学建模
基于有限旋量的等效位置变换,将有限旋量的转动项和平动项分离,则式(11)可改写为:
S f , 3 - R S R , n = S R , n Δ 0 p n Q n s O P , n (13)
式(13)中等号右边第1项为转动项,第2项为平动项,其中 S R, n Q n
S R , n = 2 t a n - φ n 2 s z n 0 Δ 2 t a n β n 2 s y n 0 Δ 2 t a n φ n 2 s z n 0 Q n = e x p φ n s ˜ z n e x p β n s ˜ y n e x p - φ n s ˜ z n
式中:s ˜ z n s ˜ y n s z n s z n
将式(13)代入式(8)并进行等效位置变换,可得:
S f , 3 - R 1 S R S ̲ N - 1 R 2 = S R , N Δ ⋯ Δ S R , 1 Δ 0 ∑ n = 1 N ∏ k = 1 n Q k p n s O P , n (14)
需要强调的是,由于有限旋量的螺旋三角积和等效位置变换均对旋量项的顺序有严格的要求,因此式(14)中的连乘必须按照角标数字由小到大的顺序依次进行右乘,具体如下:
∏ k = 1 n Q k = Q 1 Q 2 ⋯ Q n - 1 Q n
综上,利用式(14)可以建立具有任意体节数N 和任意设计参数组合(d , ln , ω R ̲ n , i ) 的3-R1 S(RS) N -1 R2 混联机构的正运动学模型。
2.3 速度雅可比矩阵
由式(14)可知,当体节数N 的数值较大时,难以直接利用对时间进行微分运算的方法获得与体节数N 相关的速度雅可比矩阵表达式。因此,本文基于3-R1 S(RS) N -1 R2 混联机构多体节运动叠加传递原理,利用有限旋量与瞬时旋量之间的微分映射关系,推导出任意体节数N 均适用的速度雅可比矩阵。
对式(8)两端进行微分运算,得到式(15)。由式(15)可知,3-R1 S(RS) N -1 R2 混联机构末端动平台的瞬时旋量等于各3-RSR体节瞬时旋量在机构末端的叠加,将式(15)改写为雅可比矩阵形式,如式(16)所示。
S ˙ f , 3 - R 1 S R S ̲ N - 1 R 2 | θ 1 , i n = 0 = S t , 3 - R S R , N + S t , 3 - R S R , N - 1 + ⋯ + S t , 3 - R S R , 1 (15)
S t , 3 - R 1 S R S ̲ N - 1 R 2 = J N ρ N + J N - 1 ρ N - 1 + ⋯ + J 1 ρ 1 (16)
式中: S t, 3-RSR, n n 个3-RSR体节的瞬时旋量,S t , 3 - R 1 S R S ̲ N - 1 R 2 1 S(RS) N -1 R2 机构的瞬时旋量;J n n 个3-RSR体节中主动R关节输入速度与机构末端速度之间的映射关系,即速度雅可比矩阵; ρ n n 个3-RSR体节的3个驱动R关节的转动角速度所构成的列向量,ρ n = θ ˙ 1 , 1 n θ ˙ 1 , 2 n θ ˙ 1 , 3 n 0 1 × 3 T
由3-RSR并联机构的几何特性5可知,相邻体节中主动R关节的速度关系为ρ n = - ρ n - 1 式(16)可改写为:
S t , 3 - R 1 S R S ̲ N - 1 R 2 = ∑ n = 1 N - 1 n - 1 J n ρ 1 (17)
根据式(17),混联机构整体的速度雅可比矩阵 J
J = ∑ n = 1 N - 1 n - 1 J n (18)
J n = J x , n - 1 J ρ , n J x , n = J x a , n J x c , n J ρ , n = J ρ a , n 0 3 × 3 0 3 × 3 0 3 × 3 J x a , n = S w a , 1 n T S w a , 2 n T S w a , 3 n T T J x c , n = S w c , 1 n T S w c , 2 n T S w c , 3 n T T J ρ a , n = S w a , 1 n T S ^ t a , 1 n S w a , 2 n T S ^ t a , 2 n S w a , 3 n T S ^ t a , 3 n
式中:S w a , i n S w c , i n n 个3-RSR体节中第i 条支链对应的驱动力旋量和约束力旋量,S ^ t a , i n n 个3-RSR体节中第i 条支链对应的单位驱动瞬时旋量。
驱动力旋量S w a , i n S w c , i n S ^ t a , i n
S w a , i n = s w a , i n r w a , i n × s w a , i n s w a , i n = Q 1 Q 2 ⋯ Q n r 5 , i n - r 3 , i n r w a , i n = Q 1 Q 2 ⋯ Q n r 5 , i n - ∑ g = n + 1 N ∏ k = 1 g Q k p g s O P , g
S w c , i n = s w c , i n r w c , i n × s w c , i n s w c , i n = s 1 , i n × s 2 , i n × s 3 , i n × s 5 , i n s 1 , i n × s 2 , i n × s 3 , i n × s 5 , i n r w c , i n = Q 1 Q 2 ⋯ Q n r 3 , i n - ∑ g = n + 1 N ∏ k = 1 g Q k p g s O P , g
S ^ t a , i n = 1 θ ˙ 1 , i n S t , R ̲ n - 2 ' , 1 = s 1 , i n r 1 , i n × s 1 , i n s 1 , i n = Q 1 Q 2 ⋯ Q n s 1 , i 1 r 1 , i n = Q 1 Q 2 ⋯ Q n - 1 r 5 , i n - ∑ g = n N ∏ k = 1 g Q k p g s O P , g
式中:s j , i n n 个3-RSR体节中第i 条支链内的第j 个关节的轴向向量,r w a , i n r w c , i n r 1 , i n n 个3-RSR体节中第i 条支链内动平台R关节轴线、S关节轴线和静平台R关节轴线的向量。
由式(18)即可获得体节数N 为任意正整数时3-R1 S(RS) N -1 R2 混联机构的速度雅可比矩阵。
2.4 仿真验证
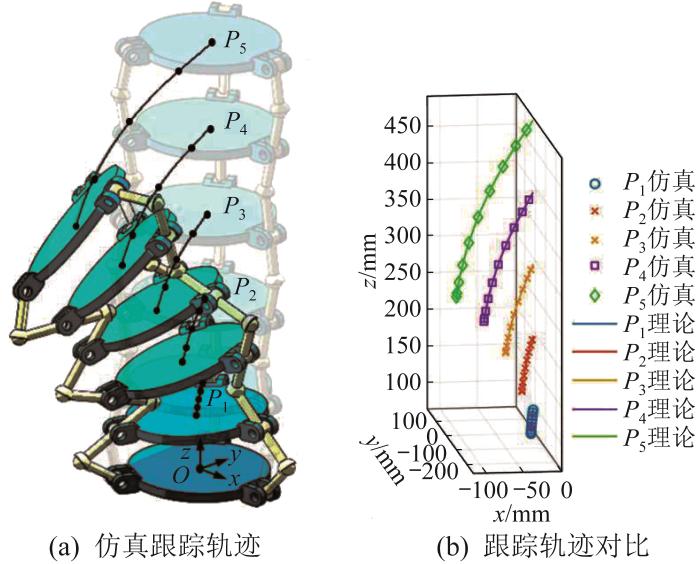
为验证前文推导的正运动学模型和速度雅可比矩阵的正确性,利用SolidWorks软件中的Motion分析模块进行仿真验证。出于模块化设计理念,设定各体节的尺寸参数d 、ln 、ω R ̲ n , i d 、l 、ω 。为不失一般性,设混联机构共有5个体节,此时构型为3-R1 S(RS)4 R2 ,通过仿真获取第1个至第5个运动平台中心P 1 ~P 5 的位置坐标和速度,并与理论计算值进行对比。
设混联机构仿真模型中各体节的几何尺寸为d = 9 m m 、 l = 50 m m 、 ω = π
θ 1 , 1 1 = 5 9 π + π 6 s i n t 10 π θ 1 , 2 1 = 5 9 π + 2 π 9 s i n t 10 π θ 1 , 3 1 = 5 9 π + 5 π 18 s i n t 10 π (19)
θ ˙ 1 , i 1 = U i π 10 c o s t 10 π U 1 = π 6 , U 2 = 2 π 9 , U 3 = 5 π 18 (20)
式(19)表示3个驱动R关节以100°为初始角度,在5 s内分别以30°、40°和50°为幅值转过了正弦函数的1/4周期。式(20)表示式(19)所示转动过程中驱动R关节的角速度。
通过运动仿真得到各运动平台中心P 1 ~P 5 的跟踪轨迹,如图4 (a)所示;导出5个运动平台中心P 1 ~P 5 对应的仿真跟踪轨迹,并与理论计算结果进行对比,如图4 (b)所示。由于仿真环境下难以直接测量各运动平台的姿态,因此本文主要验证速度雅可比矩阵中影响线性速度的部分。线性速度部分可由速度雅可比矩阵获得,如式(21)所示:
V 3 - R 1 S R S ̲ N - 1 R 2 = J v ρ 1 (21)
J v = J 1 : 3 , 1 : 3
式中:V 3 - R 1 S R S ̲ N - 1 R 2 1 S(RS) N -1 R2 混联机构末端动平台中心的线性速度, J v N 时速度雅可比矩阵的前三行前三列构成的子矩阵。
图4
图4
混联机构位置解的理论值与仿真值对比
Fig.4
Comparison of theoretical and simulated values of position solution of hybrid mechanism
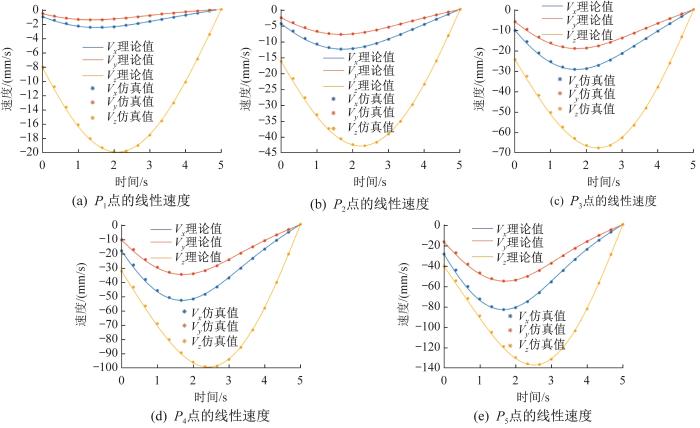
将式(20)所示的角速度变化规律代入式(21),即可获得5个运动平台中心P 1 ~P 5 的线性速度,其与仿真结果的对比如图5 所示。图中:Vx 、Vy 和Vz 分别表示运动平台中心的线性速度在x 、y 、z 方向上的分量。
图5
图5
混联机构速度解的理论值与仿真值对比
Fig.5
Comparison of theoretical and simulated values of velocity solution of hybrid mechanism
图4 和图5 结果表明,5个运动平台中心的位置解和速度解的理论值与仿真值吻合,验证了本文推导的正运动学模型和速度雅可比矩阵的正确性。
3 混联机构多目标优化设计
3.1 性能指标定义
为衡量混联机构末端动平台的姿态调整范围,定义最大姿态角β max 。该指标为末端动平台法向量相对于静平台坐标系z 轴的夹角β end, N 式(22)所示。β max 的数值越大,表明混联机构末端动平台的姿态调节范围越大。
β m a x = m a x β e n d , N (22)
由上文第n 个体节的约束力旋量S w c , i n i 条支链中S关节中心且方向向量为s w c , i n M i n
M i n = 0 r w c , i n - r w c , m n × s M , i n (23)
式中:s M , i n n 个体节中形成的第i 对力偶的方向向量。
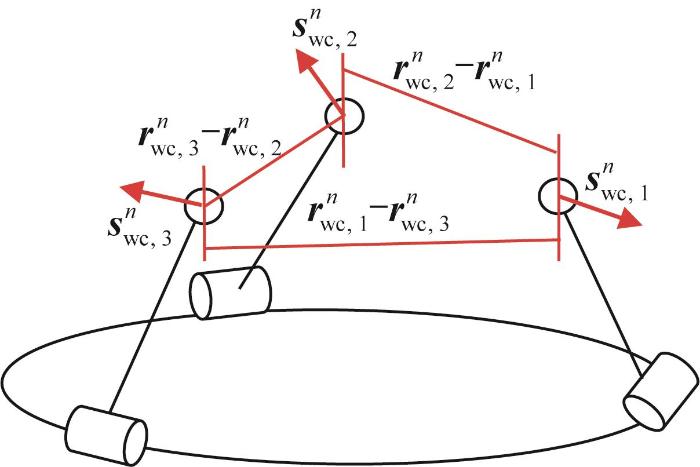
由图1 可知,同一条支链上相邻体节的球关节分别位于支链的内外两侧,处于内侧的球关节可能会因距离过近而发生干涉。另外,由式(23)可知,当球关节距离过近时,会导致约束力形成的约束力偶减小,此时混联机构若要维持固定的姿态,则需要极大的约束力(接近奇异)。为此,定义式(24)所示的最小球关节距离d S, min 来限制这种情况的发生,如图6 所示。
d S , m i n = m i n r w c , p n - r w c , j n , n = 1 , 2 , ⋯ , N , p ≠ j (24)
图6
图6
最小球关节距离示意图
Fig.6
Schematic diagram of minimum spherical joint distance
鉴于混联机构在工作空间中处于不同位形,所对应的d S , m i n d S , m i n G d S , m i n d S , m i n G
虚功率传递率是评估机构力/运动传递性能的关键指标。由于3-R1 S(RS) N -1 R2 混联机构具有多体节叠加的特征,其各体节的主动R关节的输入角速度在驱动R关节的带动下对机构末端做虚功,定义机构的局部虚功率传递率νQ :
ν Q = m i n Q N ⋯ 1 , 1 m a x Q N ⋯ 1 , 1 , Q N ⋯ 1 , 2 m a x Q N ⋯ 1 , 2 , Q N ⋯ 1 , 3 m a x Q N ⋯ 1 , 3 (25)
Q N ⋯ 1 , i = ∑ n = 1 N S w a , i n T S ^ t a , i n
式中:QN …1, i i 条支链中第1个体节到第N 个体节对机构末端动平台所做瞬时虚功的和。
定义全局虚功率传递率ηQ 为局部虚功率传递率在机构工作空间W n 中的均值,如式(26)所示。指标ηQ 的数值越大,表示驱动关节输入的力/运动传递至机构末端动平台的能力越强。
η Q = ∫ W n ν Q d W n ∫ W n d W n (26)
为衡量混联机构在特定位形下的承载能力,引入最大和最小承载力指标σF , max 和σF , min ,两者分别为矩阵G = J - 1 T J - 1 σF , m =(σF , max +σF , min )/2来综合评价机构在某一位形下的承载能力。同时,定义全域承载能力指标ηF ,如式(27)所示。指标ηF 的数值越大,表明机构在单位驱动力下的承载能力越强。
η F = ∫ W n σ F , m d W n ∫ W n d W n (27)
因全局虚功率传递率和全域承载能力这2个指标需要通过工作空间内的积分运算获得,随机选取离散点会导致指标数值出现误差。经过试验,在体节数不大于5时,每次利用MATLAB软件中的unifrnd函数(可随机生成连续均匀分布数组)生成10万组随机点,可使每2次生成的指标数值保持两位有效数字不变,符合后续的使用需求。
3.2 最优体节数选取
3-R1 S(RS) N -1 R2 混联机构由多体节叠加构成,其体节数N 会影响速度雅可比矩阵,对机构的运动/力传递特性具有较大影响。因此,体节数N 也应被视作优化参数。但由于体节数取值只能是离散的正整数,使得Pareto最优解只能分布在有限的离散点处,无法形成连续的Pareto前沿。此时,优化目标之间的权衡关系将被割裂,导致算法无法决策出2个离散最优解之间是否存在更优方案。因此,在建立目标函数前,需先确定最优体节数。
对于3-R1 S(RS) N -1 R2 混联机构,一方面,不同性能指标的量纲不统一;另一方面,同一性能指标在取不同体节数(对应不同的构型)时的取值范围不同。因此,最优体节数的选取需要综合考虑横向比较、性能等权和无严格短板三个要求。鉴于4种性能指标均为正向指标(指标数值越大,性能越优),采用极差标准化的方法,定义标准化等权重对比指标K u :
K u = 1 4 E 1 + E 2 + E 3 + E 4 (28)
E 1 = β m a x - m i n β m a x m a x β m a x - m i n β m a x E 2 = d S , m i n G - m i n d S , m i n G m a x d S , m i n G - m i n d S , m i n G E 3 = η Q - m i n η Q m a x η Q - m i n η Q E 4 = η F - m i n η F m a x η F - m i n η F
式中:β m a x d S , m i n G η Q η F
标准化等权重性能对比指标K u 越接近1,表明在该设计变量(d , l , ω )组合下,混联机构的综合性能越优。因此,可采用平均值最大、标准差最小的方法选取最优体节数。
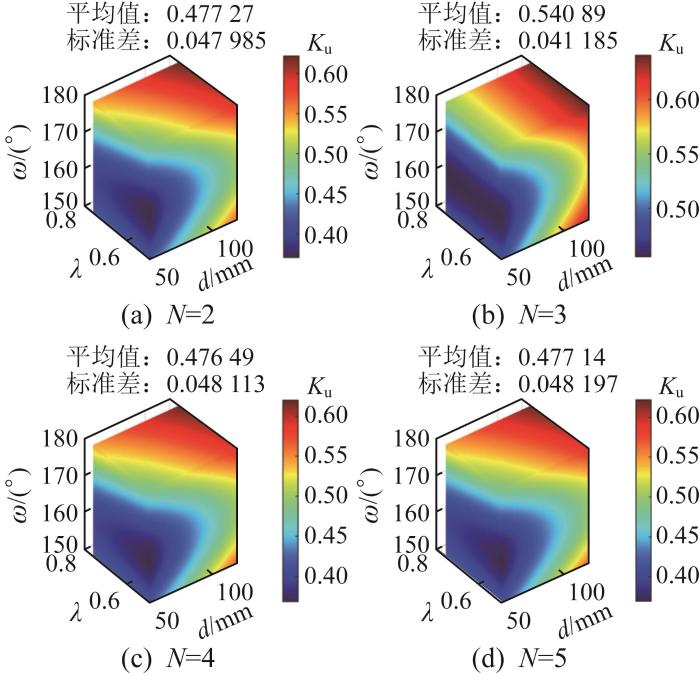
为防止出现机构整体过于细长(过大的RS杆长和较小的平台半径)或过于矮胖(过大的平台半径和较小的RS杆长)的情况,将RS杆的长度l 表示为平台半径d 的比例形式,即l =λd 。通过限制比例系数λ 的范围来控制杆件长度与平台半径的协调性。考虑到过大的体节数N 会使关节成倍增多,进而导致精度和负载难以达标,本文仅分析体节数N =2~5时性能对比指标K u 的取值分布,结果如图7 所示。
图7
图7
不同体节数下性能对比指标 K u
Fig.7
Distribution of performance comparison indicator K u under different numbers of segments
由图7 可知,当体节数N =3时,设计变量空间中性能对比指标K u 的平均值最大、标准差最小,说明3-R1 S(RS)2 R2 混联机构在设计变量空间中的综合性能最优且最稳定,故取最优体节数为3。
3.3 多目标优化
由于上述各性能指标的计算公式均为复杂非线性函数,且部分全域指标的数值需要进行大量的离散计算才能获取,为了加快性能指标的求解速度,本文采用响应面法建立各性能指标的代理模型,用于优化过程中的近似数值求解。
本文采用拉丁超立方抽样法获取200组样本点,利用式(22)、(24)、(26)和(27)计算得到各性能指标,并分别拟合出对应的1~4阶响应面模型,选取精度最高的响应面模型用于后续的多目标优化。各响应面模型的精度评估结果如表1 所示。其中,精度评价指标包括RAAE(relative average absolute error,相对平均绝对误差)、RMAE(relative mean absolute error,相对均值绝对误差)、RMSE(root mean square error,均方根误差)和决定系数R 2 。需要注意的是,RAAE与RMAE的归一化方式不同。
由表1 可知,性能指标β max 、ηQ 、ηF 对应的精度最高的响应面模型为4阶模型,d S , m i n G
m a x F d , λ , ω = β m a x d S , m i n G η Q η F T s . t . d ∈ 80 , 120 m m λ ∈ 0.50 , 0.75 ω ∈ 150 ° , 180 ° d S , m i n G ≥ 30 m m (29)
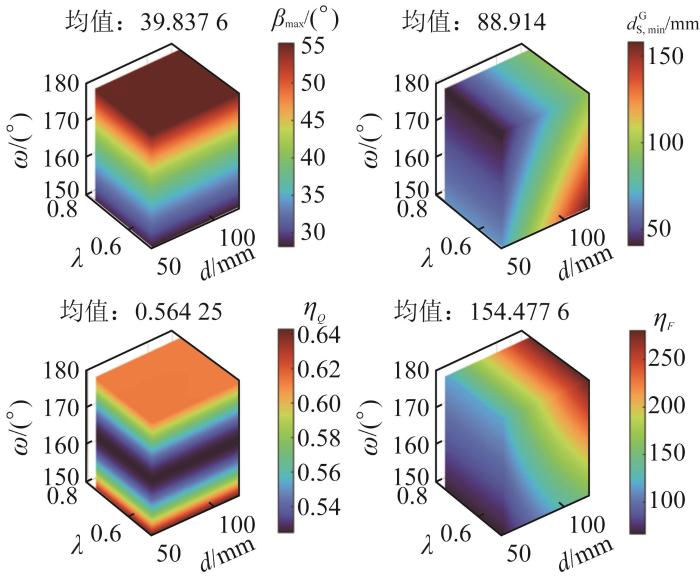
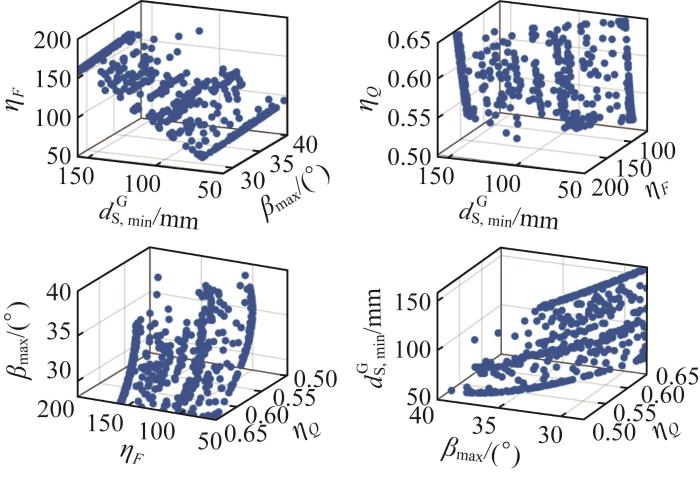
利用各性能指标的响应面模型,绘制设计变量取值范围内各性能指标的分布云图,如图8 所示。由图8 可知,性能指标β m a x d S , m i n G ηQ 和η F
图8
图8
混联机构性能指标分布云图
Fig.8
Distribution cloud maps of performance indicators of hybrid mechanism
本文采用NSGA-Ⅱ进行多目标优化,算法的参数设置如表2 所示。利用NSGA-Ⅱ对式(29)所示的优化模型进行求解,得到了包含376个最优解的Pareto前沿,如图9 所示。
图9
图9
混联机构多目标优化的Pareto 前沿
Fig.9
Pareto frontier for multi-objective optimization of hybrid mechanism
为了客观地评估4种性能指标对混联机构实际工作性能的综合影响,引入熵权-逼近理想解排序法来选取最优解。
I = I 1 ⋮ I 376 376 × 4 (30)
式中: I q q 个最优解对应的四维行向量,其元素为经过极差标准化处理后4项性能指标的数值。
然后,计算各性能指标的权重并构建加权标准化矩阵 D
D = I 1 ⋮ I 376 δ 1 δ 2 δ 3 δ 4 (31)
δ h = 1 + ( 1 / l n 376 ) ∑ q = 1 376 p q , h l n p q , h ∑ h = 1 4 1 + ( 1 / l n 376 ) ∑ q = 1 376 p q , h l n p q , h
p q , h = I q , h ∑ q = 1 376 I q , h
式中:δh 表示第h 项性能指标的权重,Iq, h 表示第q 个最优解中第h 项性能指标的取值,pq, h 表示第q 个最优解中第h 项性能指标的取值Iq, h 与该指标在Pareto前沿中取值总和的比值。
接着,基于加权标准化矩阵 D
I i d e a l + = m a x D q , 1 , m a x D q , 2 , m a x D q , 3 , m a x D q , 4 I i d e a l - = m i n D q , 1 , m i n D q , 2 , m i n D q , 3 , m i n D q , 4
式中:Dq, h 表示第q 个最优解中第h 项性能指标经加权标准化处理后的数值。
最后,计算各Pareto最优解与正、负理想解的相对贴近度Cq :
C q = d q - d q - + d q + (32)
d q + = ∑ h = 1 4 D q , h - m a x D q , h 2 d q - = ∑ h = 1 4 D q , h - m i n D q , h 2
式中:d q + d q - q 个Pareto最优解到正、负理想解的距离,采用欧氏距离进行计算。
选取相对贴近度最高的Pareto最优解作为最优方案,对应的混联机构尺寸参数为:d =99.20 mm、l =60.388 mm(λ =0.608 75)、ω
3.4 优化结果
由于最优方案对应的机构尺寸参数值为不规整小数,考虑到后续的加工制造,对数值进行就近取整:d =100 mm、l =λd =60 mm(λ =0.6)、ω d =85 mm、l =0.6d =51 mm、ω 表3 所示。
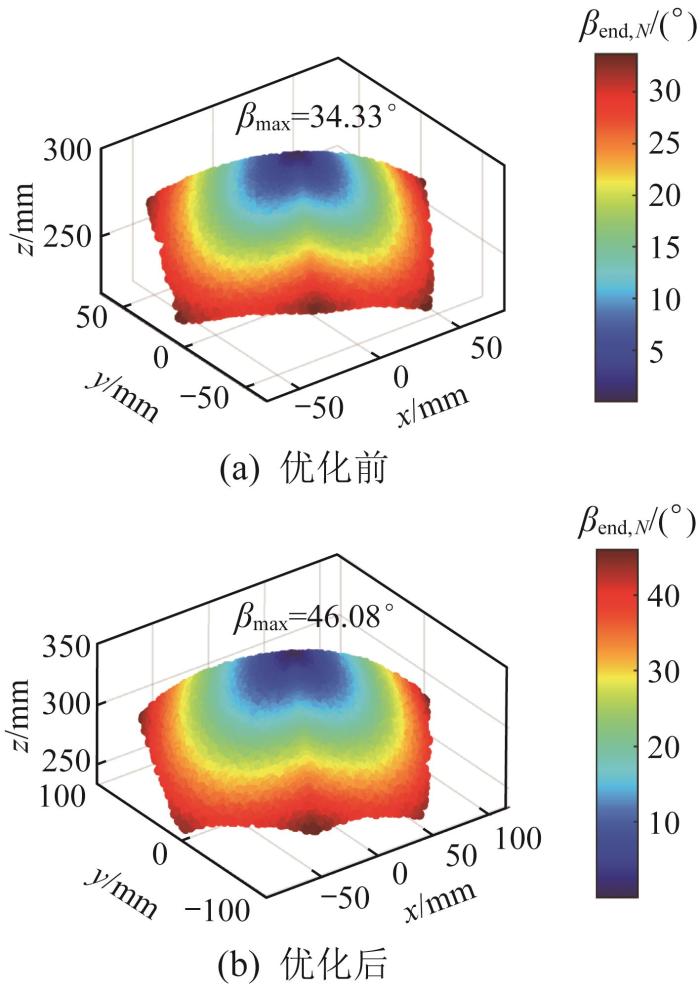
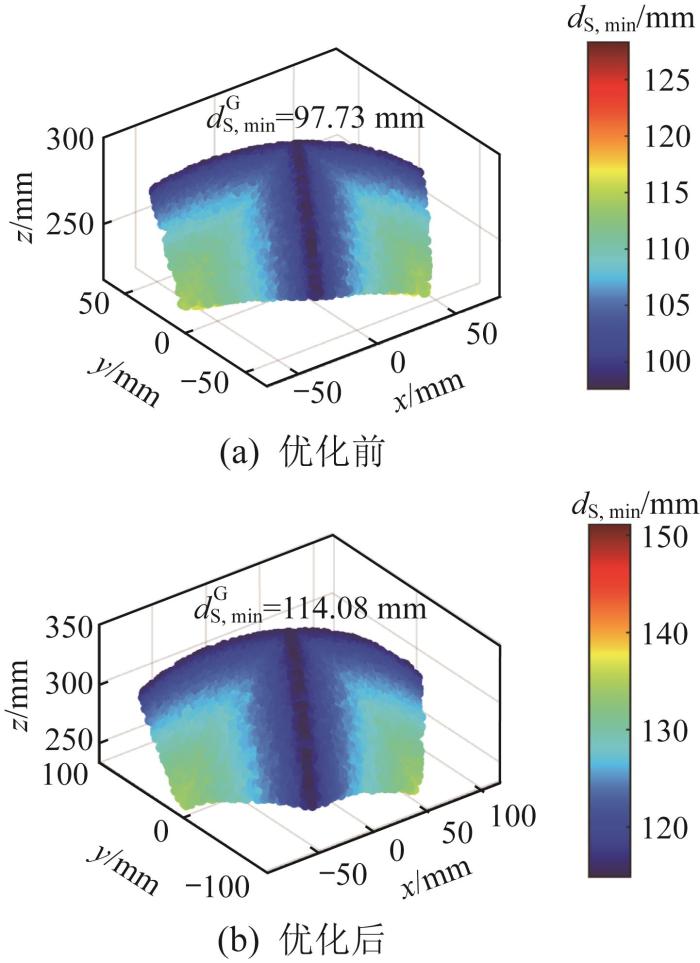
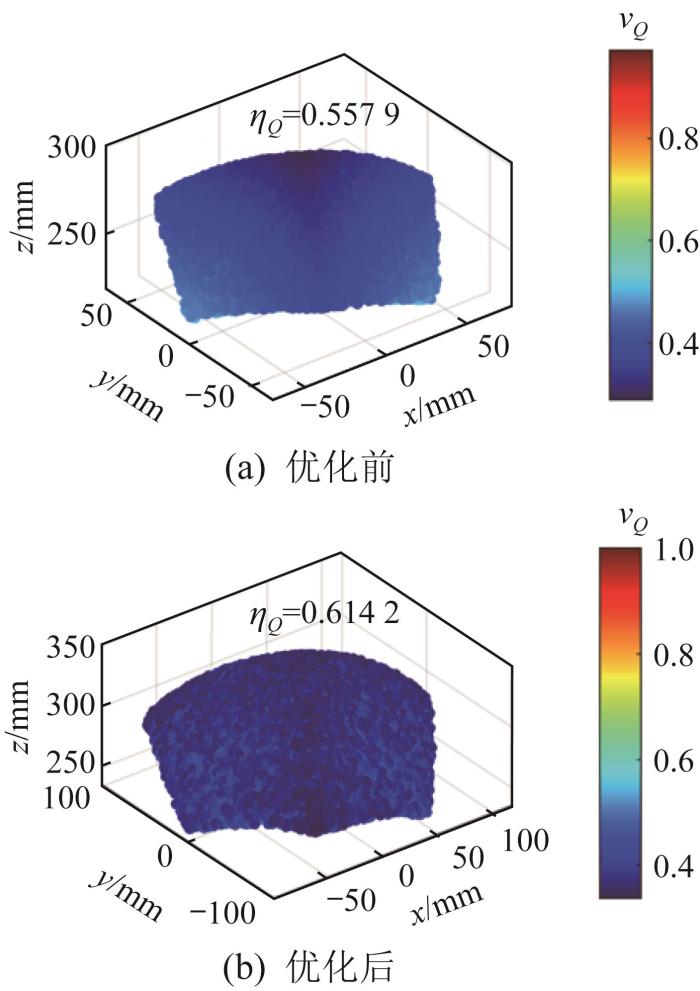
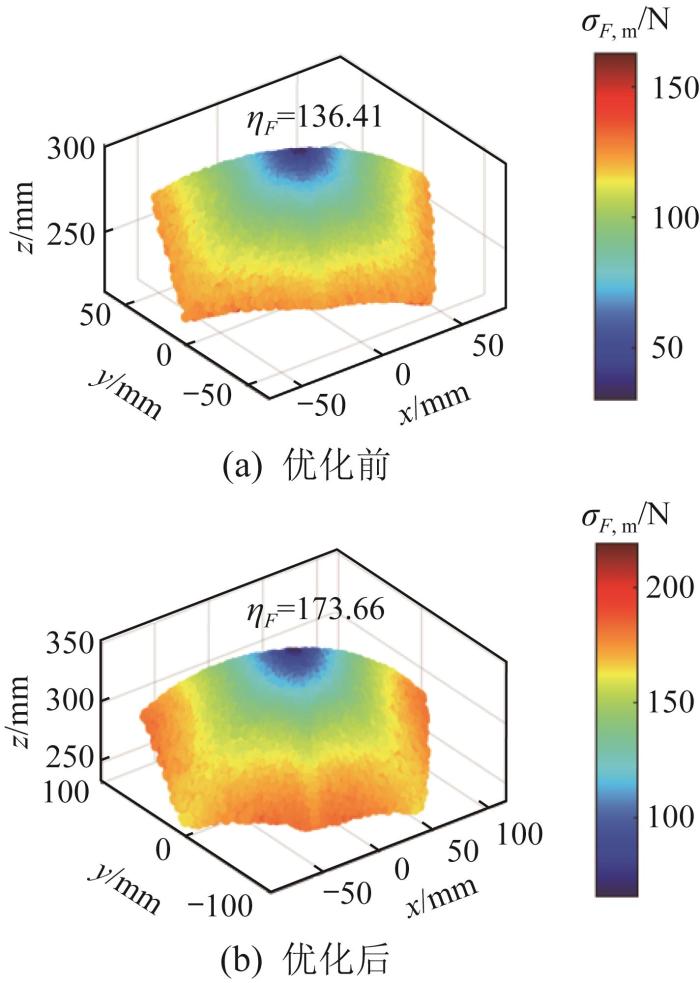
由表3 可知,尺寸参数取整前后混联机构各性能指标的相对变化率均小于2%,说明参数取整对性能指标的影响轻微,可将取整后的优化方案作为最终方案。在此基础上,优化前后混联机构的末端姿态角β end, N d S, min 、局部虚功率传递率νQ 和平均承载力σF , m 在工作空间中的分布如图10 至图13 所示。
图10
图10
优化前后混联机构的末端姿态角对比
Fig.10
Comparison of end posture angle of hybrid mechanism before and after optimization
图11
图11
优化前后混联机构的最小球关节距离对比
Fig.11
Comparison of minimum spherical joint distance of hybrid mechanism before and after optimization
图12
图12
优化前后混联机构的虚功率传递率对比
Fig.12
Comparison of virtual power transmissibility of hybrid mechanism before and after optimization
图13
图13
优化前后混联机构的平均承载力对比
Fig.13
Comparison of average load-bearing capacity of hybrid mechanism before and after optimization
由图10 至图13 可见,相较于优化前,优化后混联机构的末端姿态角、最小球关节距离、虚功率传递率和平均承载力均明显改善,且工作空间显著增大。基于最终方案的尺寸参数,设计并制作混联机构实物样机,如图14 所示。
图14
图14
优化后的混联机构样机实物图
Fig.14
Physical diagram of optimized hybrid mechanism prototype
4 结 论
1)针对3-R1 S(RS) N -1 R2 多体节叠加型混联机构,基于FIS理论对其构型进行了分析,并利用其共用运动平台和R关节的特点,通过向机构的有限旋量中引入与装配夹角相关的转动项,得出其多体节运动叠加传递原理,即末端动平台的有限运动为各体节有限运动在末端动平台中心的叠加。
2)推导了混联机构单体节的正运动学模型,利用多体节运动叠加传递原理进一步推广,得到了任意体节数下均成立的混联机构正运动学模型和速度雅可比矩阵,并通过运动仿真进行了对比验证,这可为其他类似构型机器人的正运动学模型构建提供一种新思路。
3)根据多体节叠加型混联机构的正运动学模型和速度雅可比矩阵,基于NSGA-Ⅱ和熵权-逼近理想解排序法开展了多目标优化设计。经过优化和参数取整后,混联机构的最大姿态角、全域最小球关节距离、全局虚功率传递率和全域承载能力相比于优化前分别提升了34.23%、16.73%、10.13%和27.31%。
本文链接: https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.185
参考文献
View Option
[1]
[本文引用: 2]
LIU Y YAO J T GUO Y T et al Design and analysis of hybrid cabin assembly attitude adjustment robot system
[J]. Journal of National University of Defense Technology , 2025 , 47 (2 ): 131 -145 .
DOI:10.11887/j.cn.202502012
[本文引用: 2]
[2]
[本文引用: 1]
LIU X J XIE F G YANG D et al Discussion on research mode of advanced scientific and technological innovation
[J]. Journal of Mechanical Engineering , 2022 , 58 (11 ): 1 -10 .
DOI:10.3901/JME.2022.11.001
[本文引用: 1]
[3]
张秀丽 , 孙国康 , 周洪淼 , 等 具有柔性驱动关节的串并混联仿生机械臂
[J]. 北京交通大学学报 , 2024 , 48 (6 ): 154 -161 .
[本文引用: 1]
ZHANG X L SUN G K ZHOU H M et al A series-parallel hybrid bionic manipulator with flexible driving joints
[J]. Journal of Beijing Jiaotong University , 2024 , 48 (6 ): 154 -161 .
[本文引用: 1]
[4]
NEUMANN K E Tricept application
[C]//Proceedings of 3rd Chemnitz Parallel Kinematics Seminar . Zwickau : Verlag Wissenschaftliche Scripten , 2002 : 547 -551 .
[本文引用: 1]
[6]
BI Z M WANG L H Energy modeling of machine tools for optimization of machine setups
[J]. IEEE Transactions on Automation Science and Engineering , 2012 , 9 (3 ): 607 -613 .
[本文引用: 1]
[7]
何雨镐 , 谢福贵 , 解增辉 , 等 一种五轴并联加工单元的参数与刚度优化设计
[J]. 机械工程学报 , 2024 , 60 (13 ): 308 -315 .
[本文引用: 1]
HE Y H XIE F G XIE Z H et al Parameters and stiffness optimization of a five-axis parallel machining unit
[J]. Journal of Mechanical Engineering , 2024 , 60 (13 ): 308 -315 .
[本文引用: 1]
[9]
牟德君 , 陈先岭 , 常雪龙 , 等 (2-UPU+SPR)+(2-UPU+RPS)非对称混联机构末端约束及自由度分析
[J]. 机械工程学报 , 2024 , 60 (17 ): 272 -282 .
[本文引用: 1]
MU D J CHEN X L CHANG X L et al Analysis of terminal constraints and DOF of (2-UPU+SPR)+(2-UPU+RPS) asymmetric hybrid manipulator
[J]. Journal of Mechanical Engineering , 2024 , 60 (17 ): 272 -282 .
[本文引用: 1]
[10]
胡波 , 张达 , 高俊林 , 等 基于共形几何代数求解(4SPS+SPR)+(2RPS+SPR)串并联机构位置正解
[J]. 机械工程学报 , 2021 , 57 (13 ): 102 -113 . doi:10.3901/JME.2021.13.102
[本文引用: 1]
HU B ZHANG D GAO J L et al CGA-based approach to solve the forward position solution of the (4SPS+SPR)+(2RPS+SPR) serial-parallel manipulator
[J]. Journal of Mechanical Engineering , 2021 , 57 (13 ): 102 -113 .
DOI:10.3901/JME.2021.13.102
[本文引用: 1]
[11]
胡波 , 冯苗苗 , 赵金君 , 等 少驱动多层耦合混联机构
CN115648184B [P]. 2024-12-27 .
[本文引用: 1]
HU B FENG M M ZHAO J J et al Reduced drive multi-layer coupled hybrid mechanism
CN115648184B [P]. 2024-12-27 .
[本文引用: 1]
[12]
[本文引用: 1]
SUI J H ZHAO H Z YANG H et al Research and experiment of a modified honeybee abdomen mechanism
[J]. Journal of Mechanical Engineering , 2025 , 61 (17 ): 105 -113 .
DOI:10.3901/jme.2025.17.105
[本文引用: 1]
[13]
HUANG Z LI Q C Type synthesis of symmetrical lower-mobility parallel mechanisms using the constraint-synthesis method
[J]. The International Journal of Robotics Research , 2003 , 22 (1 ): 59 -79 .
[本文引用: 1]
[14]
HE J GAO F MENG X D et al Type synthesis for 4-DOF parallel press mechanism using GF set theory
[J]. Chinese Journal of Mechanical Engineering , 2015 , 28 (4 ): 851 -859 .
[本文引用: 1]
[15]
HE L T FANG H R ZHANG D Design of a class of reconfigurable hybrid mechanisms for large complex curved surface machining based on topological graph theory
[J]. Mechanism and Machine Theory , 2023 , 190 : 105461 .
[本文引用: 1]
[16]
WEI J YU B LIU C L et al Grassmann line geometry based configuration synthesis of equivalent UU parallel mechanisms with two virtual center-of-motion
[J]. Mechanism and Machine Theory , 2023 , 181 : 105208 .
[本文引用: 1]
[17]
LIAN B B SUN T SONG Y M et al Stiffness analysis and experiment of a novel 5-DOF parallel kinematic machine considering gravitational effects
[J]. International Journal of Machine Tools and Manufacture , 2015 , 95 : 82 -96 .
[本文引用: 1]
[18]
SUN T ZHAI Y P SONG Y M et al Kinematic calibration of a 3-DOF rotational parallel manipulator using laser tracker
[J]. Robotics and Computer-Integrated Manufacturing , 2016 , 41 : 78 -91 .
[本文引用: 1]
[19]
SUN T LIAN B B YANG S F et al Kinematic calibration of serial and parallel robots based on finite and instantaneous screw theory
[J]. IEEE Transactions on Robotics , 2020 , 36 (3 ): 816 -834 .
[本文引用: 1]
[20]
SUN T LIAN B B Stiffness and mass optimization of parallel kinematic machine
[J]. Mechanism and Machine Theory , 2018 , 120 : 73 -88 .
[本文引用: 1]
[21]
SUN T YANG S F HUANG T et al A finite and instantaneous screw based approach for topology design and kinematic analysis of 5-axis parallel kinematic machines
[J]. Chinese Journal of Mechanical Engineering , 2018 , 31 (1 ): 44 .
[本文引用: 1]
[22]
SUN T YANG S F HUANG T et al A way of relating instantaneous and finite screws based on the screw triangle product
[J]. Mechanism and Machine Theory , 2017 , 108 : 75 -82 .
[本文引用: 1]
[23]
SUN T YANG S F LIAN B B Finite and instantaneous screw theory in robotic mechanism [M]. Singapore : Springer , 2020 .
[本文引用: 1]
[24]
HUO X M LIAN B B WANG P F et al Topology and dimension synchronous optimization of 1T2R parallel robots
[J]. Mechanism and Machine Theory , 2023 , 187 : 105385 .
[本文引用: 1]
[25]
CHEN K X WANG M HUO X M et al Topology and dimension synchronous optimization design of 5-DOF parallel robots for in-situ machining of large-scale steel components
[J]. Mechanism and Machine Theory , 2023 , 179 : 105105 .
[本文引用: 1]
[26]
[本文引用: 1]
GUO R F LIAN B B SONG Y M et al Kinematic analysis of Myard circular network based on FIS theory
[J]. Journal of Mechanical Engineering , 2020 , 56 (19 ): 132 -142 .
DOI:10.3901/JME.2020.19.132
[本文引用: 1]
混联式舱内装配调姿机器人系统设计与分析
2
2025
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
... 为明确多体节叠加特征对混联机构运动特性的影响,需对机构构型的拓扑结构进行深入分析.基于FIS理论,并联机构动平台的有限运动为其支链有限旋量的交集,如式(1) 所示;支链的有限运动为各关节有限运动的合成,可用有限旋量的螺旋三角积表示,如式(2) 所示.其中: S f, M 表示并联机构动平台的有限旋量, S f, L, i i 条支链的有限旋量, S f, j , i i 条支链中第j 个关节的有限旋量;Δ 1 ]. ...
混联式舱内装配调姿机器人系统设计与分析
2
2025
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
... 为明确多体节叠加特征对混联机构运动特性的影响,需对机构构型的拓扑结构进行深入分析.基于FIS理论,并联机构动平台的有限运动为其支链有限旋量的交集,如式(1) 所示;支链的有限运动为各关节有限运动的合成,可用有限旋量的螺旋三角积表示,如式(2) 所示.其中: S f, M 表示并联机构动平台的有限旋量, S f, L, i i 条支链的有限旋量, S f, j , i i 条支链中第j 个关节的有限旋量;Δ 1 ]. ...
现代科技创新研究模式探讨
1
2022
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
现代科技创新研究模式探讨
1
2022
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
具有柔性驱动关节的串并混联仿生机械臂
1
2024
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
具有柔性驱动关节的串并混联仿生机械臂
1
2024
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
Tricept application
1
2002
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
可重构混联机械手: TriVariant的误差建模与灵敏度分析
1
2006
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
可重构混联机械手: TriVariant的误差建模与灵敏度分析
1
2006
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
Energy modeling of machine tools for optimization of machine setups
1
2012
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
一种五轴并联加工单元的参数与刚度优化设计
1
2024
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
一种五轴并联加工单元的参数与刚度优化设计
1
2024
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
n (3-RPS)混联机构静力学和刚度模型
1
2015
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
n (3-RPS)混联机构静力学和刚度模型
1
2015
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
(2-UPU+SPR)+(2-UPU+RPS)非对称混联机构末端约束及自由度分析
1
2024
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
(2-UPU+SPR)+(2-UPU+RPS)非对称混联机构末端约束及自由度分析
1
2024
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
基于共形几何代数求解(4SPS+SPR)+(2RPS+SPR)串并联机构位置正解
1
2021
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
基于共形几何代数求解(4SPS+SPR)+(2RPS+SPR)串并联机构位置正解
1
2021
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
少驱动多层耦合混联机构
1
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
少驱动多层耦合混联机构
1
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
仿蜜蜂蜂腰结构的变体机构设计与实验
1
2025
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
仿蜜蜂蜂腰结构的变体机构设计与实验
1
2025
... 混联机构兼具串联机构高灵活性、大工作空间和并联机构高刚度、大负载的优点.相较于单一构型的机器人,以混联机构为机械本体的机器人更适用于一些具有高负载、大工作空间需求和结构尺寸限制的作业场景,如舱内装配机器人[1 ] 、原位加工机器人[2 ] 和仿生协作机械臂[3 ] 等.混联机构的混联方式有并-串型、串-并型和并-并型三种.前2种类型的主要区别在于串联部分与并联部分的先后位置:前者常利用其串联部分获得较大的姿态空间,如Tricept机器人[4 ] 、TriVariant机器人[5 ] 和Exechon机器人[6 ] ;后者利用其串联部分获得较大的位置空间,如移动式混联加工机器人[7 ] .针对并-并型混联机构,燕山大学的胡波团队提出了多种构型,如n (3-RPS)混联机构[8 ] 、(2-UPU+SPR)+(2-UPU+RPS)混联机构[9 ] 及(4SPS+SPR)+(2RPS+SPR)串并联机构[10 ] .这类混联机构通常由2个或多个并联机构依次相连构成,且多个并联机构独立驱动,在并联机构数量较多时呈现出驱动冗余的特点.为此,胡波等[11 ] 又提出了一种少驱动多层耦合混联机构,通过支链中杆件的几何关系将相邻关节的支链输入耦合起来,实现了并-并型混联机构的少驱动,解决了并联机构数量较多时的驱动冗余问题.隋峻浩等[12 ] 利用齿轮对多个3-RSR机构的运动进行耦合,设计了一种用于空天飞行器的仿蜜蜂蜂腰结构的变体头锥机构,并开展了相关的实验研究,进一步验证了多层并-并型混联机构具有广泛的应用前景. ...
Type synthesis of symmetrical lower-mobility parallel mechanisms using the constraint-synthesis method
1
2003
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Type synthesis for 4-DOF parallel press mechanism using GF set theory
1
2015
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Design of a class of reconfigurable hybrid mechanisms for large complex curved surface machining based on topological graph theory
1
2023
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Grassmann line geometry based configuration synthesis of equivalent UU parallel mechanisms with two virtual center-of-motion
1
2023
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Stiffness analysis and experiment of a novel 5-DOF parallel kinematic machine considering gravitational effects
1
2015
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Kinematic calibration of a 3-DOF rotational parallel manipulator using laser tracker
1
2016
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Kinematic calibration of serial and parallel robots based on finite and instantaneous screw theory
1
2020
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Stiffness and mass optimization of parallel kinematic machine
1
2018
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
A finite and instantaneous screw based approach for topology design and kinematic analysis of 5-axis parallel kinematic machines
1
2018
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
A way of relating instantaneous and finite screws based on the screw triangle product
1
2017
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
1
2020
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Topology and dimension synchronous optimization of 1T2R parallel robots
1
2023
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
Topology and dimension synchronous optimization design of 5-DOF parallel robots for in-situ machining of large-scale steel components
1
2023
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
基于FIS理论的Myard环形组网机构运动学分析
1
2020
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...
基于FIS理论的Myard环形组网机构运动学分析
1
2020
... 多层耦合混联机构具有较为复杂的构型和运动特性,需对其进行详细分析.常用于机构构型分析的方法包括约束综合法[13 ] 、GF(generalized function,广义函数)集合法[14 ] 、拓扑图论法[15 ] 和Grassmann线几何法[16 ] 等.这些方法普遍应用于并/混联机构的构型综合,难以与机构的运动特性分析结合起来.为解决上述问题,天津大学的Sun等在对并联机器人的刚度[17 ] 、运动学标定[18 -19 ] 、刚度与质量优化[20 ] 以及拓扑设计与运动学分析[21 ] 进行了一系列研究后,提出了一种利用螺旋三角积将有限旋量与瞬时旋量相关联的方法[22 ] ,并总结出了一种基于有限与瞬时旋量(finite and instantaneous screw, FIS)理论的机器人机构拓扑与性能一体化分析框架[23 ] ,实现了机构构型分析与运动特性分析的结合.其中,有限旋量为机构构型研究提供了完整的数学框架,可对复杂刚体系统由参考位形变换到期望位形的连续运动进行最简数学描述,获取并联机构支链及动平台的有限运动表征,从而实现机构构型的分析与综合.瞬时旋量可由有限旋量的微分映射得到,常用于分析机构的瞬时速度及加速度等运动/力传递关系.利用上述基于FIS理论的一体化分析框架,Huo等[24 ] 对1T2R并联机构的拓扑与性能集成优化进行了研究;Chen等[25 ] 对用于大型金属构件原位加工的并联机器人进行了拓扑与性能集成优化设计;郭瑞峰等[26 ] 对用于环形组网机构的Myard折展机构进行了运动学分析. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}