多体节叠加型混联机构正运动学建模与优化设计
Forward kinematics modeling and optimal design of multi-segment stacked hybrid mechanism
多体节叠加型混联机构正运动学建模与优化设计 |
| 齐杨,娄元航 |
|
Forward kinematics modeling and optimal design of multi-segment stacked hybrid mechanism |
| Yang QI,Yuanhang LOU |
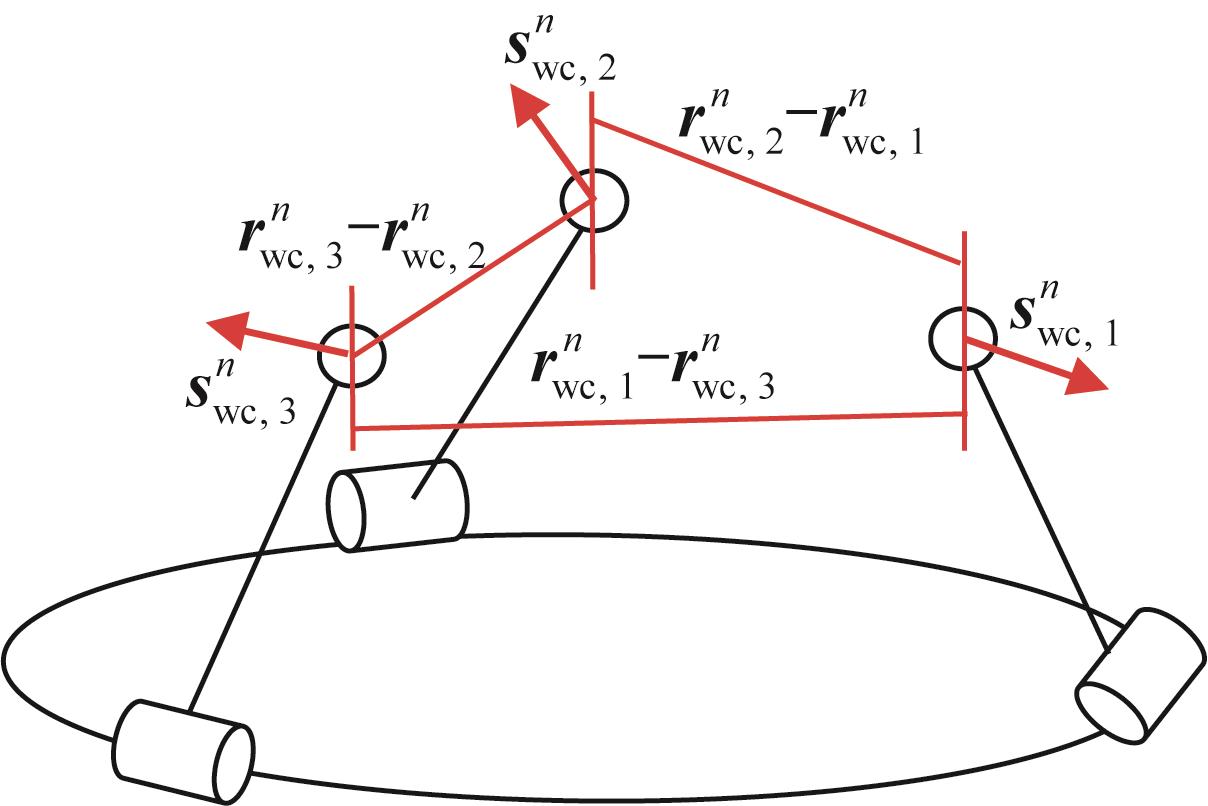
| 图6 最小球关节距离示意图 |
| Fig.6 Schematic diagram of minimum spherical joint distance |
|
|