煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] 。煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] 。悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业。由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] 。同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] 。因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题。
近年来,许多学者针对悬臂式掘进机在不同巷道条件下的断面成形轨迹规划进行了深入研究。张旭辉等[7 ] 结合数字孪生技术,在虚拟端设计了示教轨迹并进行了优化,解决了掘进机断面成形轨迹过度依赖现场人工经验的问题。Xu等[8 ] 建立了掘进机的空间位姿模型,并基于正、逆运动学进行了截割轨迹规划,验证了掘进机自主截割理论的可靠性。Ning等[9 ] 结合掘进机的运动位置、速度及加速度等限制条件,利用线性内插法对截割臂关节轨迹进行了优化设计,并以此为基础构建了截割臂的截割精度模型。马宏伟等[10 ] 对巷道拱形断面进行了数值仿真,并采用“弓”形轨迹规划方法实现了掘进机断面成形截割任务。
在轨迹规划领域,国内外学者普遍采用智能优化算法。这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划。李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化。田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法。Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量。沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升。Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好。王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证。刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹。张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化。Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划。郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业。夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤。田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划。上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题。
为此,本文通过对智能优化算法、掘进机断面成形轨迹规划等进行研究,提出了一种改进灰狼优化(grey wolf optimizer, GWO)算法,以实现煤矿井下掘进机最优断面成形轨迹的自主规划。首先,利用栅格法构建二维巷道断面模型,并对不规则夹矸进行膨胀化处理。然后,对GWO算法的收敛因子、学习机制、位置更新策略进行改进,并在改进GWO算法的基础上,以截割能耗、欠挖面积和转向次数为优化目标,对掘进机的最优断面成形轨迹进行规划。接着,在4种巷道断面环境下开展轨迹规划仿真实验,并对轨迹长度、欠挖面积、转向次数和重复截割次数等指标进行分析。最后,搭建掘进机样机截割实验平台,并在不同巷道断面环境下开展截割实验,以验证所提出方法的可行性,旨在为井下掘进设备的智能化和自动化发展奠定理论基础。
1 总体研究方案
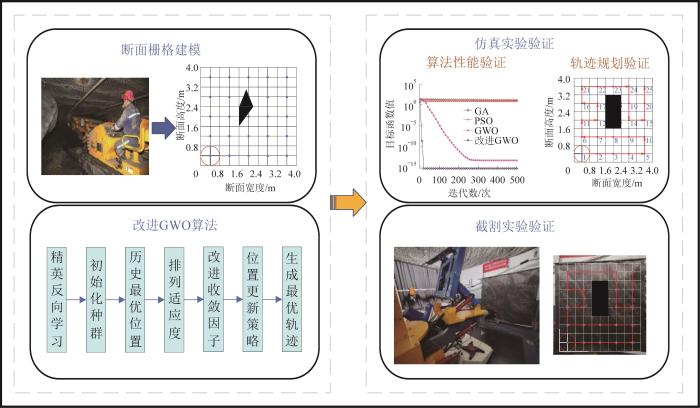
现阶段,在煤矿巷道断面成形作业中,悬臂式掘进机主要依靠人工操作,存在掘进效率低、安全性能差等问题。为解决煤矿巷道复杂条件下的断面成形轨迹规划难题,需要实现对巷道待截割断面环境的建模以及掘进机截割部轨迹的自主规划。为此,在掘进机机身上布置多源传感器,以实时监测掘进机的状态;同时,在栅格地图中建立二维巷道断面模型,并利用改进GWO算法进行轨迹规划,以得到最优的巷道断面成形轨迹。所提出的掘进机断面成形轨迹规划方法的总体方案如图1 所示。
图1
图1
掘进机断面成形轨迹规划总体方案
Fig.1
Overall scheme of trajectory planning for roadheader section forming
首先,根据已知的煤矿巷道断面信息,利用栅格法构建二维巷道断面模型,并将不规则夹矸部分的栅格进行膨胀化处理。然后,使用余弦式收敛因子、精英反向学习机制及基于PSO算法的位置更新策略等方法来改进GWO算法,以提升其收敛速度和收敛精度;同时,利用国际通用的测试函数进行仿真实验,以验证改进GWO算法的性能。接着,在仿真平台中,利用改进GWO算法规划得到最优的断面成形轨迹。最后,搭建掘进机样机实验平台以开展断面截割实验,通过由回转油缸行程传感器、抬升油缸行程传感器组成的截割臂位姿检测系统实时采集位姿数据,以验证所提出的轨迹规划方法对断面成形质量、掘进效率等的提升作用。
2 巷道断面栅格建模
2.1 栅格法
栅格法是一种简单而有效的地图构建方法,被广泛应用于智能装备的轨迹规划与障碍物的实时建模。在煤矿巷道掘进作业中,为获取夹矸在断面环境中的位置和尺寸信息,需要对断面上所有的待截割点按一定的方向和顺序进行标定,进而确定受夹矸影响的轨迹点。常见的巷道断面形状包括梯形、矩形和拱形等,本文以矩形巷道断面为研究对象,建立其栅格化模型。
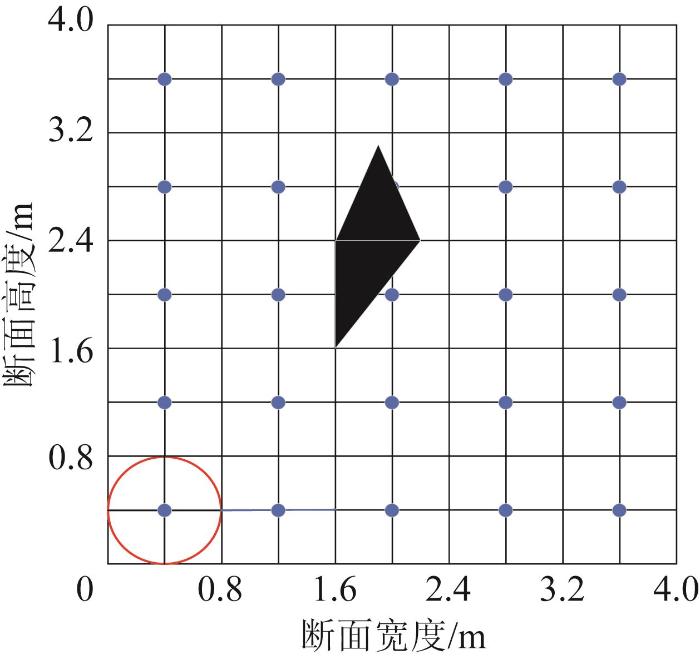
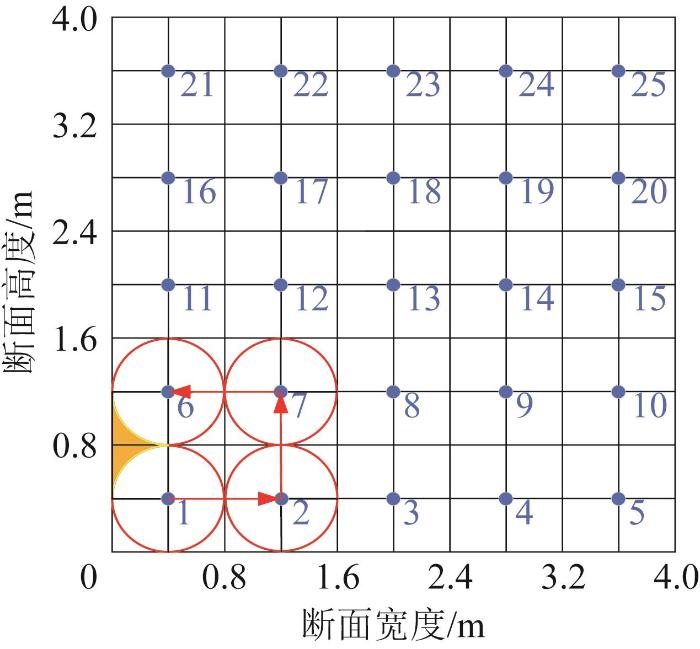
栅格化是指将连续空间划分为离散的网格单元,通常用于处理地图、图像等。对于矩形巷道断面,可将其划分为一系列离散的矩形栅格单元。设待截割巷道断面的宽度为W ,高度为H ,截割头半径为R ,采用尺寸为R × R 的单元格进行栅格化处理,则该断面的总栅格数m =WH /R 2 。若在计算时发现存在多余的网格区域,则可采用刷帮、扫底等工艺来实现截割。所建立的二维巷道断面栅格模型如图2 所示。图中:圆形区域为待截割断面上掘进机截割头的投影,占4个网格,圆心为截割过程中截割头需要通过的中心点;黑色区域标记了夹矸所处的具体位置;白色区域为待截割区域。
图2
图2
巷道断面栅格模型
Fig.2
Grid model of roadway section
2.2 夹矸膨胀化处理
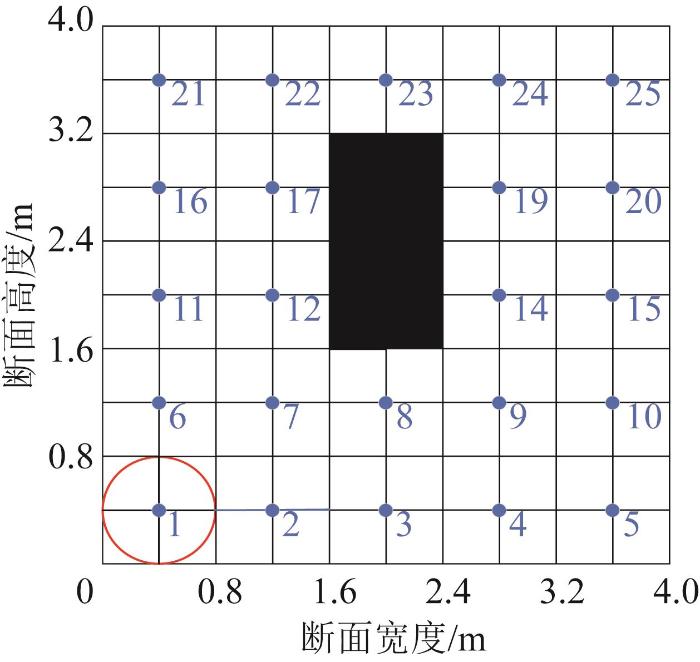
由于实际巷道断面内的夹矸形态不规则,需要对未占满整个网格的夹矸进行膨胀扩展,以形成一个完整的网格。不规则夹矸的扩展方法采用二值膨胀法,公式为:O = U ⊕ I = ( x , y ) | [ I x y ⋂ U ] ≠ ∅ O U I Ixy 为膨胀位置( x , y ) 图3 所示。
图3
图3
不规则夹矸膨胀处理结果
Fig.3
Expansion treatment result of irregular gangue
3 GWO 算法的改进与仿真验证
3.1 GWO 算法
GWO算法[23 ] 的核心思想源于灰狼的捕猎过程。灰狼狼群存在明确的等级制度,按照决策权层级自上而下依次为:α狼、β狼、δ狼与ω狼。灰狼的捕猎流程可划分为3个阶段:追捕、包围、攻击。在GWO算法中,取前3只狼(最优解)为α狼、β狼和δ狼,剩下的狼(备选解)均为ω狼。灰狼捕猎行为的数学模型描述如下:
D = | C X P t - X t | (1)
X t + 1 = X P t - A D (2)
A = 2 a r 1 - a z
C = 2 r 2
式中:D 为灰狼与猎物之间的距离; X P 为猎物的位置向量, X t 为当前迭代次数; A C a 为收敛因子,其取值在迭代过程中由初始值线性下降到0; r 1 、 r 2 为各元素取值范围为[0, 1]的随机向量;z
X t + 1 = ( X 1 + X 2 + X 3 ) 3 (3)
X n = X j - A n D j D j = C n X j - X
式中: X 1 、 X 2 、 X 3 分别为ω狼个体受α狼、β狼和δ狼引导更新后的位置向量, X j j =α, β, δ)为α狼、β狼和δ狼当前的位置向量,Dj 为α狼、β狼和δ狼与其他ω狼个体间的距离, C n n =1, 2, 3)为随机向量, A n
3.2 GWO 算法的改进
3.2.1 改进收敛因子
在GWO算法的寻优过程中,自适应系数向量 A a 的变化而变化。 A a 的表达式如下:
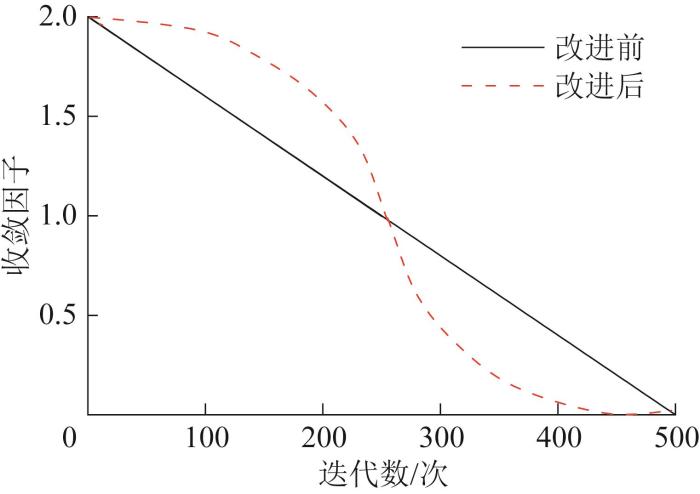
a = 1 + c o s t - 1 π t m a x - 1 , t ≤ 1 2 t m a x 1 - c o s t - 1 π t m a x - 1 , 1 2 t m a x < t < t m a x (4)
图4 所示为改进前后的收敛因子对比。由图4 可以看出,与常规线性收敛因子相比,改进后的非线性收敛因子在初始阶段的下降速度较慢,可长期维持较大值,提高了GWO算法的全局寻优能力,避免陷入局部最优;在后续阶段,为了提高GWO算法搜索的准确性,收敛因子长期维持较小值,以加快寻优速度。
图4
图4
改进前后的收敛因子对比
Fig.4
Comparison of convergence factor before and after improvement
3.2.2 引入精英反向学习机制
精英反向学习机制[24 ] 的原理如下:先由群体中的精英个体组成逆向群体,再从逆向群体与现有群体中选择优良个体组成新的群体,以提高群体的多样性,从而避免GWO算法陷入局部最优。在GWO算法寻优过程中,将灰狼种群的极值点个体设为种群中的精英个体,其位置向量可表示为:
X i = ( X i , 1 , X i , 2 , … , X i , M ) (5)
X i ¯ = ( X i , 1 ¯ , X i , 2 ¯ , ⋅ ⋅ ⋅ , X i , M ¯ ) (6)
X i , d ¯ = δ ( l d + u d ) - X i , d (7)
式中:δ ld 为动态边界上限,ud 为动态边界下限。
当精英个体位置的反向解处于边界之外时,需要重新随机生成,重置方程如下:
X i , d ¯ = e ( l d + u d ) (8)
3.2.3 改进位置更新策略
PSO算法[25 ] 可将每一个粒子随机地分布在解域空间内。将粒子的位置设定为x ,根据适应度值设置局部最优位置和全局最优位置,则粒子的速度更新公式可表示为:
v i d , k + 1 = ω v i d , k + c 1 r 1 , k ( P i d , k - x i d , k ) + c 2 r 2 , k ( P g d , k - x i d , k ) (9)
式中:v i d , k v i d , k + 1 i 第k 次、第k + 1 d 维的速度,r 1, k r 2, k Pid , k k 次迭代的粒子最优位置,P g d , k k 次迭代的群体最优位置,x i d , k k c 1 c 2
x i d , k + 1 = x i d , k + v i d , k + 1 (10)
GWO算法在位置更新过程中综合考虑了个体位置以及种群最优、优、次优位置信息,但并未考虑各领袖狼的影响权重。鉴于PSO算法具有一定记忆能力,能够避免GWO算法陷入局部最优,基于PSO对GWO算法的位置更新策略进行改进。改进后的位置更新公式可表示为:
X t + 1 = 1 3 b 1 r 1 Δ X 1 t + 1 + 1 3 b 2 r 2 Δ X 2 t + 1 + 1 3 b 3 r 3 Δ X 3 t + 1 (11)
Δ X 1 t + 1 = X α t - X t Δ X 2 t + 1 = X β t - X t Δ X 3 t + 1 = X δ t - X t
式中:Δ X 1 Δ X 2 Δ X 3 r 1 r 2 r 3 b 1 、b 2 、b 3 为学习因子,表征α狼、β狼和δ狼的影响权重,本文设b 1 =0.5,b 2 =0.3,b 3 =0.2。
在改进GWO算法中引入学习因子,可以更好地平衡算法的全局搜索能力与局部搜索能力,能够为后续的轨迹规划奠定理论基础。
3.3 改进GWO 算法的性能测试
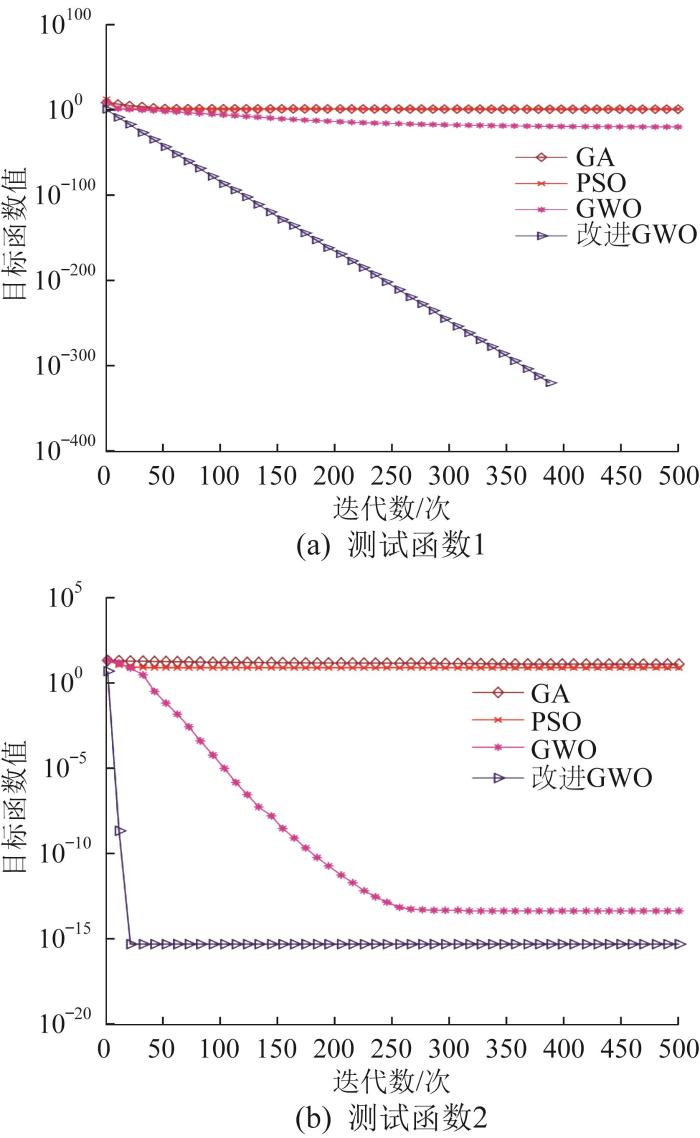
IEEE国际进化计算大会(IEEE Congress on Evolutionary Computation, IEEE CEC)测试函数用例是一组用于评价与比较智能优化算法性能的标准函数,其一般具有已知或接近的最优解,可用于检验算法的搜索能力、收敛速度和收敛精度等。基于此,本文采用2个标准测试函数对传统GA、传统PSO算法、传统GWO算法和改进GWO算法的性能进行了测试,结果如图5 所示。从测试结果来看,改进GWO算法表现出更为优异的性能,相比于其他算法,其收敛速度和收敛精度显著提高。
图 5
图 5
智能优化算法的收敛曲线对比
Fig.5
Comparison of convergence curves of intelligent optimization algorithms
4 基于改进GWO 算法的掘进机断面成形轨迹规划
4.1 断面成形优化模型
掘进机断面成形轨迹规划通常以截割能耗最低与断面成形质量最佳为优化目标。其中:截割能耗包括截割头的旋转能耗和截割臂的摆动能耗;断面成形质量的评价指标主要包括欠挖面积和转向次数,欠挖面积越小、转向次数越少,则断面成形质量越好。
4.1.1 截割能耗
为了降低掘进机的截割能耗和提高其工作效率,需要对掘进机在断面成形作业过程中的截割能耗进行优化。掘进机的截割能耗Q 等于截割头旋转能耗Q 1 与截割臂摆动能耗Q 2 之和,即Q = Q 1 +Q 2 。其中:截割头的旋转能耗会随截割面积的增大而增大,在掘进过程中若保留较多欠挖区域,则可降低旋转能耗;断面成形轨迹越长,则伴随的截割臂摆动次数越多,摆动能耗相应增加。旋转能耗Q 1 和摆动能耗Q 2 的计算式如下:
Q 1 = q 1 ( s + s 1 - s 2 - s 3 ) h (12)
Q 2 = q 2 L (13)
式中:q 1 为截割头截割单位体积煤岩的能耗,s 为断面面积,s 1 为二次挖掘面积,s 2 为欠挖面积,s 3 为夹矸面积,h 为截割头平均钻入深度,q 2 为截割臂摆动单位长度的能耗,L 为断面成形轨迹长度。
4.1.2 欠挖面积
如图6 所示,当截割头依次从1→2→7→6经过时,轨迹点1与轨迹点6之间的区域不能被截割到,即发生欠挖情况。将这个区域的面积定义为单位欠挖面积s 0
s 0 = 2 ( R 2 - π R 2 / 4 ) (14)
图 6
图 6
欠挖区域示意图
Fig.6
Schematic diagram of under-excavated area
基于此,即可根据一系列轨迹上任意轨迹点的连续序列来判定有无欠挖区域,判断式如下:
N u = 1 , p u ∈ E , p u + 1 ∉ E , ∀ u ∈ { 1 , 2 , … , n f - 1 } 1 , p u ∈ E , u = n f 0 , 其他 (15)
式中:Nu 为判断是否存在欠挖区域的指示函数,Nu =1表示存在欠挖区域,Nu =0表示不存在欠挖区域;E 为轨迹点序号集合,n f 为轨迹点数量,pu 、pu +1 为轨迹点序号。
需要指出的是,若未进行刷帮、扫底等工艺,则因受截割头外形的约束,无论选择哪条断面成形轨迹,最终均会在包含轨迹的矩形断面的每个顶点处形成2个单位欠挖区域。考虑到夹矸等障碍物,本文在规划断面成形轨迹时不进行刷帮处理。由此可知,截割产生的总欠挖面积为:
s 2 = s 0 ∑ 1 n f N u + 2 (16)
4.1.3 转向次数
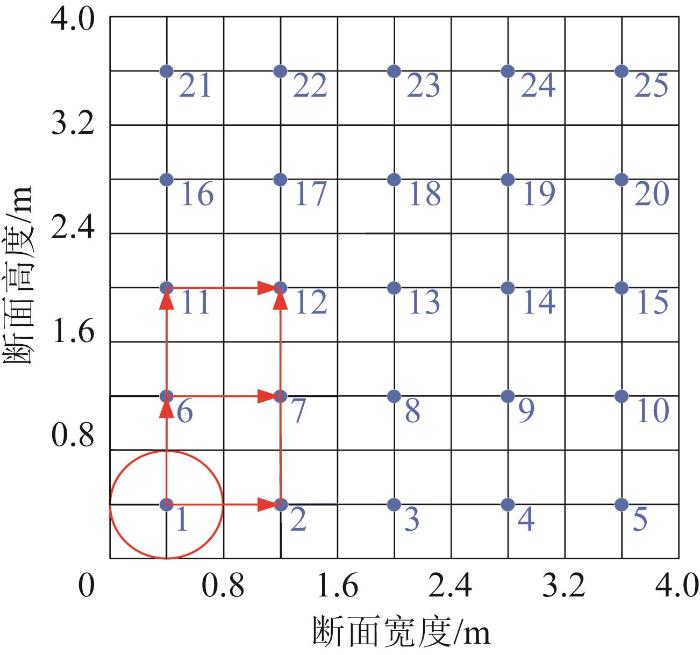
掘进机截割臂在进行截割作业时频繁转向不仅会增加能耗,还可能会影响截割过程的稳定性和精确性,从而影响断面成形质量。如图7 所示,当断面成形轨迹的起点和终点围成“日”字形时,截割头可通过以下3种方式形成断面成形轨迹:1→2→7→12、1→6→11→12和1→6→7→12。当截割头从1→2→7→12、1→6→11→12依次经过时,断面成形轨迹存在1次转向;从1→6→7→12依次经过时,断面成形轨迹存在2次转向。综上,断面成形轨迹转向次数的表达式如下:
T = ∑ u = 1 n f - 1 J (17)
J = 1 , o u ≠ o u + 1 0 , o u = o u + 1
式中:T 为断面成形轨迹的转向次数,J 为判断轨迹方向是否变化的指示函数,ou 、ou +1 为轨迹点的方向。
图 7
图 7
断面成形轨迹转向示意图
Fig.7
Schematic diagram of steering of section forming trajectory
4.1.4 断面成形约束
在规划断面成形轨迹时,需要根据掘进机的实际作业情况设定相应的约束条件。
第一,在掘进机进行截割作业时,断面成形轨迹上相继的2个轨迹点必须是邻接的。令S p u pu 的轨迹点的相邻轨迹点序号集合,即:
p u + 1 ∈ S p u , ∀ u ∈ { 1 , 2 , … , n f - 1 } (18)
( P = n f ) ∧ ( p u ≠ p w ) = 1 , ∀ u , w ∈ { 1 , 2 , … , n f } , u ≠ w (19)
式中:P 为轨迹点序列,pw 为与pu 不同的轨迹点序号。
第三,断面成形轨迹不经过夹矸区域Ω L p u p u + 1 pu 与pu +1 的轨迹点之间的路径,则有:
L p u p u + 1 ⋂ Ω = ∅ , ∀ u ∈ { 1 , 2 , … , n f - 1 } (20)
基于上述约束条件,构建断面成形轨迹规划的优化模型:
m i n F ( P ) = λ 1 Q ( P ) + λ 2 s 2 ( P ) + λ 3 T ( P ) s . t . ( P = n f ) ∧ ( p u ≠ p w ) = 1 , u ≠ w L p u p u + 1 ⋂ Ω = ∅ p u + 1 ∈ S p u (21)
式中:λ 1 λ 2 λ 3
4.2 轨迹规划仿真任务设置
以矩形截面巷道的挖掘作业为例,根据实际掘进机的尺寸,设截割头的半径为0.4 m;在4 m×4 m的断面中,设栅格边长为0.4 m。截割起点的选择与煤岩整体的坚硬程度有关:对于软煤,以巷道断面中心为起点;对于中硬煤,以巷道断面左侧下方为起点;对于硬煤,以巷道断面左侧上方为起点。本文以中硬煤为研究对象,设挖掘每立方米煤岩所需的能耗为6 kW/h。不同机型掘进机截割臂摆动单位长度所需的能耗也不同,本文设为0.1 kJ/m。在此基础上,针对巷道施工过程中断面夹矸分布的复杂性,设置4种断面环境,如表1 所示。
4.3 轨迹规划仿真分析
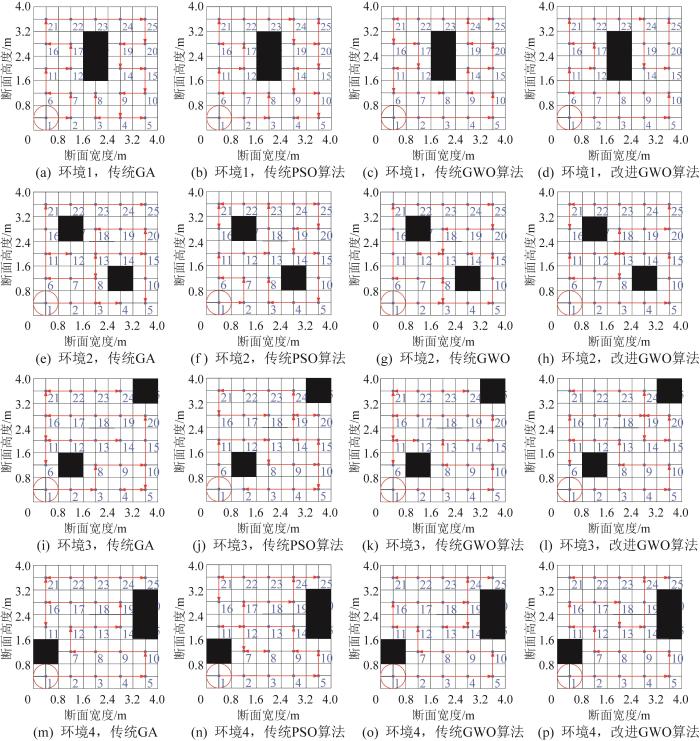
根据4.2节中设置的任务,分别基于传统GA、传统PSO算法、传统GWO算法和改进GWO算法对4种巷道断面环境下的掘进机断面成形轨迹进行仿真规划,结果如图8 所示。设截割头的起点为轨迹点1,截割头从起点开始历经所有待截割的轨迹点,截割过程中箭头指向为截割头的移动方向。对于横向和纵向的截割动作,在实际截割时,只需打开截割部的回转油缸或抬升油缸,即可实现掘进机沿横向和纵向的断面截割。
图8
图8
掘进机断面成形轨迹仿真规划方案对比
Fig.8
Comparison of simulation planning schemes for section forming trajectory of roadheader
基于重复截割次数、转向次数、轨迹长度和单位欠挖面积这4项评价指标,对基于传统GA、传统PSO算法、传统GWO算法和改进GWO算法的掘进机断面成形轨迹规划仿真结果进行对比,如表2 所示。结果表明,基于改进GWO算法规划得到的掘进机截割能耗和断面成形质量均优于其他算法;基于改进GWO算法获得的最优轨迹的欠挖面积相对较小,可有效减少后续的扫帮工序,在提升断面成形质量的同时提高了截割效率,且截割臂的转向次数较少,改善了频繁转向影响掘进机稳定性和截割效率的问题,从而提高了截割准确性。
5 实验验证
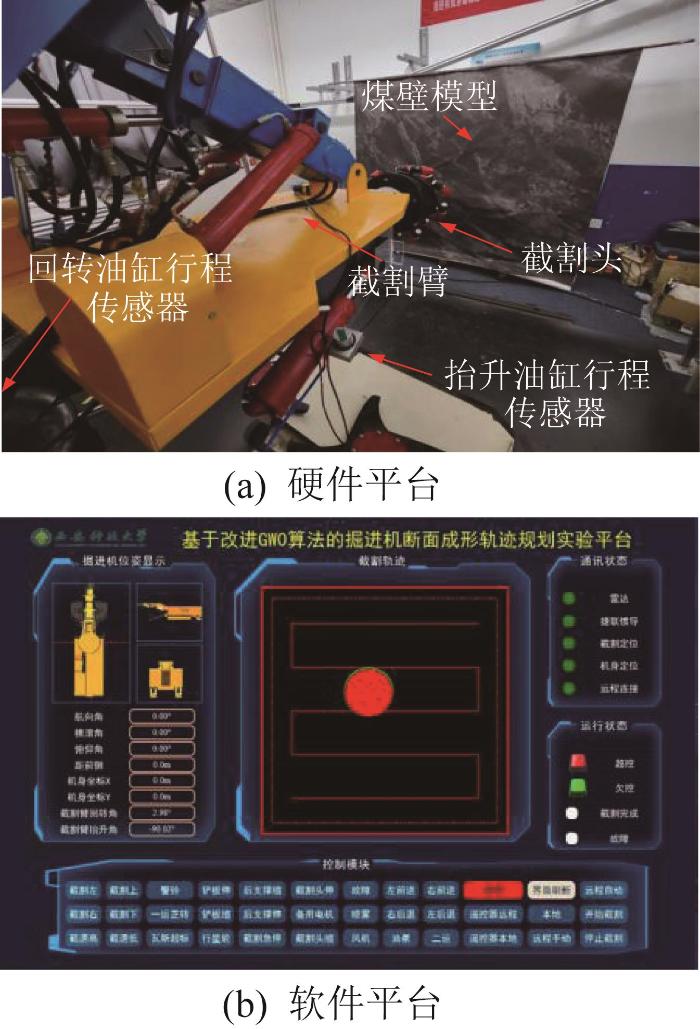
5.1 实验平台搭建
在实验室现有条件的基础上,搭建掘进机截割实验平台,如图9 所示。其中:硬件平台主要包括悬臂式掘进机样机、截割臂位姿检测系统(由回转油缸行程传感器和抬升油缸行程传感器组成)以及煤壁模型等;软件平台主要包括由掘进机截割臂位姿显示模块、断面成形轨迹显示模块、掘进机远程控制模块组成的掘进机自主定位与智能截割控制平台。
图9
图9
掘进机截割实验平台
Fig. 9
Roadheader cutting experiment platform
5.2 截割实验
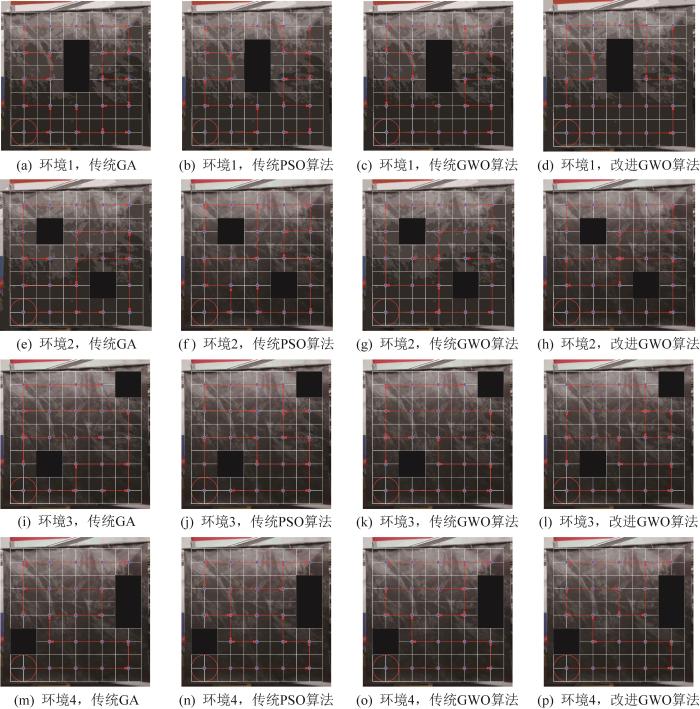
掘进机断面成形轨迹规划实验的测试指标为:1)截割效率,鉴于掘进机截割实验平台无法施加额外载荷,在实验中将截割臂摆动速度设为恒定,截割效率以完成固定轨迹所用的时间来评估;2)断面成形质量,在煤壁模型上设置不同位置的夹矸后,软件平台界面上可实时显示避开夹矸后的断面成形轨迹,可用轨迹的精度及覆盖率来表征断面成形质量。为了验证本文所提出的方法在实际掘进机中应用的可行性,结合真实掘进机与掘进机样机的尺寸比例以及可截割范围的比例,在截割实验中以2 m×2 m的矩形断面为例,设置图10 所示的断面环境,使用软件平台分别根据利用传统GA、传统PSO算法、传统GWO算法和改进GWO算法规划的断面成形轨迹来控制掘进机样机进行截割实验。掘进机样机在不同位置处的截割动作如图11 所示。
图10
图10
掘进机断面成形轨迹实验规划方案对比
Fig. 10
Comparison of experimental planning schemes for section forming trajectory of roadheader
图11
图11
掘进机样机的截割动作
Fig. 11
Cutting action of roadheader prototype
掘进机样机的截割实验结果如表3 所示。结果表明,在不同实验环境下,与传统GWO算法相比,使用改进GWO算法规划断面成形轨迹时,掘进机的截割时间平均缩短了10%,截割覆盖率平均提升了4%;与传统PSO算法相比,截割时间平均缩短了12%,截割覆盖率平均提升了6%;与传统GA相比,截割时间平均缩短了14%,截割覆盖率平均提升了7%。通过多组截割实验发现,本文所提出的断面成形轨迹规划方法的性能较好,能够满足巷道掘进作业的规范和要求。
6 结 论
提高掘进机的截割效率和截割质量是目前煤矿智能化面临的重要难题。为此,本文围绕掘进机断面成形轨迹规划问题开展研究。综合考虑截割能耗、欠挖面积、转向次数和重复截割次数等多个指标,并结合断面环境对掘进机截割作业的影响,提出了一种基于改进GWO算法的断面成形轨迹规划方法,并通过仿真分析和实验验证了其可行性,主要结论如下。
1)通过引入非线性收敛因子、精英反向学习机制以及基于PSO的位置更新策略,对传统GWO算法进行了改进,有效提升了GWO算法的全局搜索能力和局部搜索能力,加快了其寻优速度,且避免了算法陷入局部最优。
2)通过对巷道断面进行栅格化建模以及对不规则夹矸进行膨胀化处理,设计了4种夹矸位置不同的断面环境。通过开展断面成形轨迹规划仿真实验发现,本文所提出的方法对于常见的矩形巷道断面均可规划得到最优的断面成形轨迹,且可在保证截割安全的前提下降低截割能耗和提升断面成形质量。
3)截割实验结果表明,相较于传统算法,改进GWO算法规划得到的断面成形轨迹在截割效率和断面成形质量方面均有所提升,可满足不同煤矿巷道断面环境下掘进机的作业要求。后续研究工作可在煤矿井下真实掘进机上开展,以实现巷道掘进技术的智能化发展,进一步提高掘进效率。
参考文献
View Option
[1]
王国法 , 刘峰 , 孟祥军 , 等 煤矿智能化(初级阶段)研究与实践
[J]. 煤炭科学技术 , 2019 , 47 (8 ): 1 -36 .
[本文引用: 1]
WANG G F LIU F MENG X J et al Research and practice on intelligent coal mine constructi on (primary stage)
[J]. Coal Science and Technology , 2019 , 47 (8 ): 1 -36 .
[本文引用: 1]
[2]
张旭辉 , 杨文娟 , 薛旭升 , 等 煤矿远程智能掘进面临的挑战与研究进展
[J]. 煤炭学报 , 2022 , 47 (1 ): 579 -597 .
[本文引用: 1]
ZHANG X H YANG W J XUE X S et al Challenges and developing of the intelligent remote control on roadheaders in coal mine
[J]. Journal of China Coal Society , 2022 , 47 (1 ): 579 -597 .
[本文引用: 1]
[3]
王国法 , 庞义辉 , 任怀伟 , 等 智慧矿山系统工程及关键技术研究与实践
[J]. 煤炭学报 , 2024 , 49 (1 ): 181 -202 .
[本文引用: 1]
WANG G F PANG Y H REN H W et al System engineering and key technologies research and practice of smart mine
[J]. Journal of China Coal Society , 2024 , 49 (1 ): 181 -202 .
[本文引用: 1]
[4]
葛世荣 , 胡而已 , 李允旺 煤矿机器人技术新进展及新方向
[J]. 煤炭学报 , 2023 , 48 (1 ): 54 -73 .
[本文引用: 1]
GE S R HU E Y LI Y W New progress and direction of robot technology in coal mine
[J]. Journal of China Coal Society , 2023 , 48 (1 ): 54 -73 .
[本文引用: 1]
[5]
杨文娟 , 张旭辉 , 张超 , 等 悬臂式掘进机器人巷道成形智能截割控制系统研究
[J]. 工矿自动化 , 2019 , 45 (9 ): 40 -46 .
[本文引用: 1]
YANG W J ZHANG X H ZHANG C et al Research on intelligent cutting control system for roadway forming of boom-type tunneling robot
[J]. Journal of Mine Automation , 2019 , 45 (9 ): 40 -46 .
[本文引用: 1]
[6]
雷孟宇 , 张旭辉 , 杨文娟 , 等 钻锚机器人钻臂轨迹规划方法研究
[J]. 煤田地质与勘探 , 2023 , 51 (10 ): 180 -190 .
[本文引用: 1]
LEI M Y ZHANG X H YANG W J et al Manipulator trajectory planning method of anchor drilling robot
[J]. Coal Geology & Exploration , 2023 , 51 (10 ): 180 -190 .
[本文引用: 1]
[7]
张旭辉 , 王甜 , 张超 , 等 数字孪生驱动的悬臂式掘进机虚拟示教记忆截割方法
[J]. 煤炭学报 , 2023 , 48 (11 ): 4247 -4260 .
[本文引用: 1]
ZHANG X H WANG T ZHANG C et al DT-driven memory cutting control method using VR instruction of boom-type roadheader
[J]. Journal of China Coal Society , 2023 , 48 (11 ): 4247 -4260 .
[本文引用: 1]
[8]
XU Z Y LIANG M F FANG X Q et al Research on autonomous cutting method of cantilever roadheader
[J]. Energies , 2022 , 15 (17 ): 6190 .
[本文引用: 1]
[9]
NING S R SU H GAO J Research on automatic section precision forming of boom-type roadheader
[C]//Proceedings of the 2015 International Conference on Intelligent Systems Research and Mechatronics Engineering . Zhengzhou, Apr . 11 -13 , 2015 .
[本文引用: 1]
[10]
马宏伟 , 王赛赛 , 王川伟 , 等 短横轴截割机器人直墙拱形巷道自动成形控制方法
[J]. 西安科技大学学报 , 2024 , 44 (3 ): 418 -429 .
[本文引用: 1]
MA H W WANG S S WANG C W et al Automatic forming control method of straight-wall arched roadway for short transverse axis cutting robot
[J]. Journal of Xi’an University of Science and Technology , 2024 , 44 (3 ): 418 -429 .
[本文引用: 1]
[11]
李琴 , 贾英崎 , 黄玉峰 , 等 一种工业机器人多目标轨迹优化算法
[J]. 工程设计学报 , 2022 , 29 (2 ): 187 -195 .
[本文引用: 1]
LI Q JIA Y Q HUANG Y F et al A multi-objective trajectory optimization algorithm for industrial robot
[J]. Chinese Journal of Engineering Design , 2022 , 29 (2 ): 187 -195 .
[本文引用: 1]
[12]
田雅琴 , 胡梦辉 , 刘文涛 , 等 基于跳点搜索-遗传算法的自主移动机器人路径规划
[J]. 工程设计学报 , 2023 , 30 (6 ): 697 -706 .
[本文引用: 1]
TIAN Y Q HU M H LIU W T et al Path planning of autonomous mobile robot based on jump point search-genetic algorithm
[J]. Chinese Journal of Engineering Design , 2023 , 30 (6 ): 697 -706 .
[本文引用: 1]
[13]
ZHANG X H HUANG M Y LEI M Y et al Improved rapid-expanding-random-tree-based trajectory planning on drill ARM of anchor drilling robots
[J]. Machines , 2023 , 11 (9 ): 858 .
[本文引用: 1]
[14]
沈显庆 , 王贺 , 马志鹏 , 等 基于栅格法与改进A*算法的掘进机截割轨迹规划
[J]. 黑龙江科技大学学报 , 2021 , 31 (5 ): 642 -647 .
[本文引用: 1]
SHEN X Q WANG H MA Z P et al Cutting trajectory planning of roadheader based on raster method and improved A* algorithm
[J]. Journal of Heilongjiang University of Science and Technology , 2021 , 31 (5 ): 642 -647 .
[本文引用: 1]
[15]
ZHANG D Y LIU S Y JIA X Q et al Full coverage cutting path planning of robotized roadheader to improve cutting stability of the coal lane cross-section containing gangue
[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science , 2022 , 236 (1 ): 579 -592 .
[本文引用: 1]
[16]
王苏彧 , 马登成 , 任泽 , 等 悬臂式掘进机断面成形轨迹多目标优化方法研究
[J]. 仪器仪表学报 , 2021 , 42 (8 ): 183 -192 .
[本文引用: 1]
WANG S Y MA D C REN Z et al A multi-objective optimization method for cantilever roadheader section forming trajectory
[J]. Chinese Journal of Scientific Instrument , 2021 , 42 (8 ): 183 -192 .
[本文引用: 1]
[17]
刘若涵 , 刘永立 栅格法与Dijkstra算法的掘进机截割轨迹规划
[J]. 黑龙江科技大学学报 , 2021 , 31 (1 ): 60 -67 .
[本文引用: 1]
LIU R H LIU Y L Cutting trajectory planning of cantilever roadheader based on grid method and Dijkstra algorithm
[J]. Journal of Heilongjiang University of Science and Technology , 2021 , 31 (1 ): 60 -67 .
[本文引用: 1]
[18]
张丽丽 , 谭超 , 王忠宾 , 等 基于微粒群算法的采煤机记忆截割路径优化
[J]. 煤炭科学技术 , 2010 , 38 (4 ): 69 -71 .
[本文引用: 1]
ZHANG L L TAN C WANG Z B et al Optimization of mnemonic cutting path for coal shearer based on corpuscular group algorithm
[J]. Coal Science and Technology , 2010 , 38 (4 ): 69 -71 .
[本文引用: 1]
[19]
WANG S Y WU M Cutting trajectory planning of sections with complex composition for roadheader
[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science , 2019 , 233 (4 ): 1441 -1452 .
[本文引用: 1]
[20]
郭一楠 , 黄遥 , 巩敦卫 , 等 巷道断面成形轨迹的多目标蚁群规划方法
[J]. 华中科技大学学报(自然科学版) , 2022 , 50 (5 ): 115 -122 .
[本文引用: 1]
GUO Y N HUANG Y GONG D W et al Trajectory planning method based on multi-objective ant colony algorithm for forming section of roadway
[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition) , 2022 , 50 (5 ): 115 -122 .
[本文引用: 1]
[21]
夏煌煌 基于蚁群算法的煤矿巷道断面成形轨迹规划方法
[D]. 徐州 : 中国矿业大学 , 2020 .
[本文引用: 1]
XIA H H Trajectory planning method of forming a section in coal mine roadway based on ant colony algorithm
[D]. Xuzhou : China University of Mining and Technology , 2020 .
[本文引用: 1]
[22]
田劼 , 银晓琦 , 文艺成 基于混合IWO-PSO算法的掘进机截割轨迹规划方法
[J]. 工矿自动化 , 2021 , 47 (12 ): 55 -61 .
[本文引用: 1]
TIAN J YIN X Q WEN Y C Method of cutting trajectory planning of roadheader based on hybrid IWO-PSO algorithm
[J]. Journal of Mine Automation , 2021 , 47 (12 ): 55 -61 .
[本文引用: 1]
[23]
MIRJALILI S MIRJALILI S M LEWIS A Grey wolf optimizer
[J]. Advances in Engineering Software , 2014 , 69 : 46 -61 .
[本文引用: 1]
[24]
CHEN L MA L Y LI L J Enhancing sine cosine algorithm based on social learning and elite opposition-based learning
[J]. Computing , 2024 , 106 (5 ): 1475 -1517 .
[本文引用: 1]
[25]
ZHANG H Y WU W S CHEN Z X et al Well logs reconstruction of petroleum energy exploration based on bidirectional long short-term memory networks with a PSO optimization algorithm
[J]. Geoenergy Science and Engineering , 2024 , 239 : 212975 .
[本文引用: 1]
煤矿智能化(初级阶段)研究与实践
1
2019
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
煤矿智能化(初级阶段)研究与实践
1
2019
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
煤矿远程智能掘进面临的挑战与研究进展
1
2022
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
煤矿远程智能掘进面临的挑战与研究进展
1
2022
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
智慧矿山系统工程及关键技术研究与实践
1
2024
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
智慧矿山系统工程及关键技术研究与实践
1
2024
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
煤矿机器人技术新进展及新方向
1
2023
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
煤矿机器人技术新进展及新方向
1
2023
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
悬臂式掘进机器人巷道成形智能截割控制系统研究
1
2019
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
悬臂式掘进机器人巷道成形智能截割控制系统研究
1
2019
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
钻锚机器人钻臂轨迹规划方法研究
1
2023
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
钻锚机器人钻臂轨迹规划方法研究
1
2023
... 煤炭作为我国的主体能源,为国民经济的持续快速发展提供了重要的基础能源和工业原料[1 -2 ] .煤矿机器人的研发应用为煤矿智能化发展提供了核心技术和装备支撑,对提高煤矿安全生产水平具有重要意义[3 ] .悬臂式掘进机作为我国煤矿综掘工作面常见的工程设备[4 ] ,具有出色的截割能力与灵活的操作性能,被广泛应用于煤矿巷道的掘进作业.由于受到煤矿巷道复杂多变的地质条件、狭小的作业空间以及未知的载荷突变等因素的影响,悬臂式掘进机在进行截割作业时缺乏优化和决策机制,无法满足智能化无人矿井的掘进要求[5 ] .同时,现阶段的巷道断面成形作业大多依靠人工操作掘进机进行往复式截割,存在自动化程度低、工人劳动强度大及工作效率无法提升等问题[6 ] .因此,为提升巷道断面成形质量和掘进效率,实时规划最优的掘进机断面成形轨迹是目前亟须解决的难题. ...
数字孪生驱动的悬臂式掘进机虚拟示教记忆截割方法
1
2023
... 近年来,许多学者针对悬臂式掘进机在不同巷道条件下的断面成形轨迹规划进行了深入研究.张旭辉等[7 ] 结合数字孪生技术,在虚拟端设计了示教轨迹并进行了优化,解决了掘进机断面成形轨迹过度依赖现场人工经验的问题.Xu等[8 ] 建立了掘进机的空间位姿模型,并基于正、逆运动学进行了截割轨迹规划,验证了掘进机自主截割理论的可靠性.Ning等[9 ] 结合掘进机的运动位置、速度及加速度等限制条件,利用线性内插法对截割臂关节轨迹进行了优化设计,并以此为基础构建了截割臂的截割精度模型.马宏伟等[10 ] 对巷道拱形断面进行了数值仿真,并采用“弓”形轨迹规划方法实现了掘进机断面成形截割任务. ...
数字孪生驱动的悬臂式掘进机虚拟示教记忆截割方法
1
2023
... 近年来,许多学者针对悬臂式掘进机在不同巷道条件下的断面成形轨迹规划进行了深入研究.张旭辉等[7 ] 结合数字孪生技术,在虚拟端设计了示教轨迹并进行了优化,解决了掘进机断面成形轨迹过度依赖现场人工经验的问题.Xu等[8 ] 建立了掘进机的空间位姿模型,并基于正、逆运动学进行了截割轨迹规划,验证了掘进机自主截割理论的可靠性.Ning等[9 ] 结合掘进机的运动位置、速度及加速度等限制条件,利用线性内插法对截割臂关节轨迹进行了优化设计,并以此为基础构建了截割臂的截割精度模型.马宏伟等[10 ] 对巷道拱形断面进行了数值仿真,并采用“弓”形轨迹规划方法实现了掘进机断面成形截割任务. ...
Research on autonomous cutting method of cantilever roadheader
1
2022
... 近年来,许多学者针对悬臂式掘进机在不同巷道条件下的断面成形轨迹规划进行了深入研究.张旭辉等[7 ] 结合数字孪生技术,在虚拟端设计了示教轨迹并进行了优化,解决了掘进机断面成形轨迹过度依赖现场人工经验的问题.Xu等[8 ] 建立了掘进机的空间位姿模型,并基于正、逆运动学进行了截割轨迹规划,验证了掘进机自主截割理论的可靠性.Ning等[9 ] 结合掘进机的运动位置、速度及加速度等限制条件,利用线性内插法对截割臂关节轨迹进行了优化设计,并以此为基础构建了截割臂的截割精度模型.马宏伟等[10 ] 对巷道拱形断面进行了数值仿真,并采用“弓”形轨迹规划方法实现了掘进机断面成形截割任务. ...
Research on automatic section precision forming of boom-type roadheader
1
2015
... 近年来,许多学者针对悬臂式掘进机在不同巷道条件下的断面成形轨迹规划进行了深入研究.张旭辉等[7 ] 结合数字孪生技术,在虚拟端设计了示教轨迹并进行了优化,解决了掘进机断面成形轨迹过度依赖现场人工经验的问题.Xu等[8 ] 建立了掘进机的空间位姿模型,并基于正、逆运动学进行了截割轨迹规划,验证了掘进机自主截割理论的可靠性.Ning等[9 ] 结合掘进机的运动位置、速度及加速度等限制条件,利用线性内插法对截割臂关节轨迹进行了优化设计,并以此为基础构建了截割臂的截割精度模型.马宏伟等[10 ] 对巷道拱形断面进行了数值仿真,并采用“弓”形轨迹规划方法实现了掘进机断面成形截割任务. ...
短横轴截割机器人直墙拱形巷道自动成形控制方法
1
2024
... 近年来,许多学者针对悬臂式掘进机在不同巷道条件下的断面成形轨迹规划进行了深入研究.张旭辉等[7 ] 结合数字孪生技术,在虚拟端设计了示教轨迹并进行了优化,解决了掘进机断面成形轨迹过度依赖现场人工经验的问题.Xu等[8 ] 建立了掘进机的空间位姿模型,并基于正、逆运动学进行了截割轨迹规划,验证了掘进机自主截割理论的可靠性.Ning等[9 ] 结合掘进机的运动位置、速度及加速度等限制条件,利用线性内插法对截割臂关节轨迹进行了优化设计,并以此为基础构建了截割臂的截割精度模型.马宏伟等[10 ] 对巷道拱形断面进行了数值仿真,并采用“弓”形轨迹规划方法实现了掘进机断面成形截割任务. ...
短横轴截割机器人直墙拱形巷道自动成形控制方法
1
2024
... 近年来,许多学者针对悬臂式掘进机在不同巷道条件下的断面成形轨迹规划进行了深入研究.张旭辉等[7 ] 结合数字孪生技术,在虚拟端设计了示教轨迹并进行了优化,解决了掘进机断面成形轨迹过度依赖现场人工经验的问题.Xu等[8 ] 建立了掘进机的空间位姿模型,并基于正、逆运动学进行了截割轨迹规划,验证了掘进机自主截割理论的可靠性.Ning等[9 ] 结合掘进机的运动位置、速度及加速度等限制条件,利用线性内插法对截割臂关节轨迹进行了优化设计,并以此为基础构建了截割臂的截割精度模型.马宏伟等[10 ] 对巷道拱形断面进行了数值仿真,并采用“弓”形轨迹规划方法实现了掘进机断面成形截割任务. ...
一种工业机器人多目标轨迹优化算法
1
2022
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
一种工业机器人多目标轨迹优化算法
1
2022
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于跳点搜索-遗传算法的自主移动机器人路径规划
1
2023
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于跳点搜索-遗传算法的自主移动机器人路径规划
1
2023
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
Improved rapid-expanding-random-tree-based trajectory planning on drill ARM of anchor drilling robots
1
2023
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于栅格法与改进A*算法的掘进机截割轨迹规划
1
2021
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于栅格法与改进A*算法的掘进机截割轨迹规划
1
2021
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
Full coverage cutting path planning of robotized roadheader to improve cutting stability of the coal lane cross-section containing gangue
1
2022
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
悬臂式掘进机断面成形轨迹多目标优化方法研究
1
2021
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
悬臂式掘进机断面成形轨迹多目标优化方法研究
1
2021
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
栅格法与Dijkstra算法的掘进机截割轨迹规划
1
2021
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
栅格法与Dijkstra算法的掘进机截割轨迹规划
1
2021
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于微粒群算法的采煤机记忆截割路径优化
1
2010
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于微粒群算法的采煤机记忆截割路径优化
1
2010
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
Cutting trajectory planning of sections with complex composition for roadheader
1
2019
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
巷道断面成形轨迹的多目标蚁群规划方法
1
2022
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
巷道断面成形轨迹的多目标蚁群规划方法
1
2022
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于蚁群算法的煤矿巷道断面成形轨迹规划方法
1
2020
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于蚁群算法的煤矿巷道断面成形轨迹规划方法
1
2020
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于混合IWO-PSO算法的掘进机截割轨迹规划方法
1
2021
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
基于混合IWO-PSO算法的掘进机截割轨迹规划方法
1
2021
... 在轨迹规划领域,国内外学者普遍采用智能优化算法.这些算法因在复杂非线性、多目标优化问题中具有优越性能,已被广泛应用于机器人、掘进机截割臂等的轨迹规划.李琴等[11 ] 基于布谷鸟搜索算法和非支配排序遗传算法,对工业机器人进行了多目标轨迹优化.田雅琴等[12 ] 提出了基于跳点搜索-遗传算法(genetic algorithm, GA)的自主移动机器人路径规划方法.Zhang等[13 ] 针对RRT(rapidly-exploring random tree,快速搜索随机树)算法运行速度慢的问题,引入了人工势场因子,并采用贪心法和三次B样条曲线拟合方法进行平滑路径处理,提高了锚杆钻孔机器人钻臂的轨迹规划质量.沈显庆等[14 ] 利用改进A*算法规划了掘进机的截割轨迹,提高了截割轨迹的覆盖率,实现了掘进机工作效率的提升.Zhang等[15 ] 结合仿生神经网络与浮动模板方法,对掘进机的截割路径进行了全覆盖优化,优化效果较好.王苏彧等[16 ] 以效能和安全性为目标,建立了掘进机断面成形轨迹多目标优化模型,并结合实际截割工况,利用多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法进行了求解和仿真验证.刘若涵等[17 ] 对巷道断面进行了栅格建模,并利用Dijkstra算法优化了掘进机的截割轨迹.张丽丽等[18 ] 考虑到巷道煤岩坚硬程度不同时采煤机的截割轨迹将偏离原始记忆截割轨迹,利用环状PSO算法进行了截割轨迹优化.Wang等[19 ] 采用改进蚁群算法搜索得到了掘进机的最优截割轨迹,实现了避免截割头碰撞情况下的截割轨迹规划.郭一楠等[20 ] 提出了一种基于GA的巷道断面成形轨迹多目标优化方法,实现了低成本、高效率、高安全性的掘进机截割作业.夏煌煌[21 ] 基于蚁群算法实现了煤矿巷道下掘进机的断面成形轨迹规划,既确保了断面成形质量,又减少了掘进机自身的截割损伤.田劼等[22 ] 提出了一种基于混合IWO-PSO(invasive weed optimization-PSO,杂草优化-粒子群优化)算法的掘进机截割轨迹规划方法,并在将不规则夹矸二值膨胀后的断面环境中实现了轨迹规划.上述研究虽有助于解决巷道断面成形问题,但由于煤矿井下为多模态环境且工况复杂,仍存在截割能耗大、断面成形质量低及轨迹优化目标单一等问题. ...
Grey wolf optimizer
1
2014
... GWO算法[23 ] 的核心思想源于灰狼的捕猎过程.灰狼狼群存在明确的等级制度,按照决策权层级自上而下依次为:α狼、β狼、δ狼与ω狼.灰狼的捕猎流程可划分为3个阶段:追捕、包围、攻击.在GWO算法中,取前3只狼(最优解)为α狼、β狼和δ狼,剩下的狼(备选解)均为ω狼.灰狼捕猎行为的数学模型描述如下: ...
Enhancing sine cosine algorithm based on social learning and elite opposition-based learning
1
2024
... 精英反向学习机制[24 ] 的原理如下:先由群体中的精英个体组成逆向群体,再从逆向群体与现有群体中选择优良个体组成新的群体,以提高群体的多样性,从而避免GWO算法陷入局部最优.在GWO算法寻优过程中,将灰狼种群的极值点个体设为种群中的精英个体,其位置向量可表示为: ...
Well logs reconstruction of petroleum energy exploration based on bidirectional long short-term memory networks with a PSO optimization algorithm
1
2024
... PSO算法[25 ] 可将每一个粒子随机地分布在解域空间内.将粒子的位置设定为x ,根据适应度值设置局部最优位置和全局最优位置,则粒子的速度更新公式可表示为: ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}