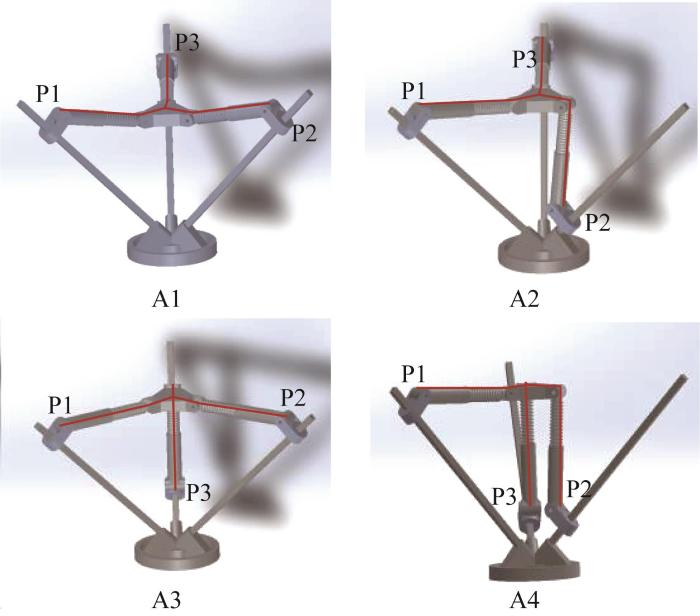
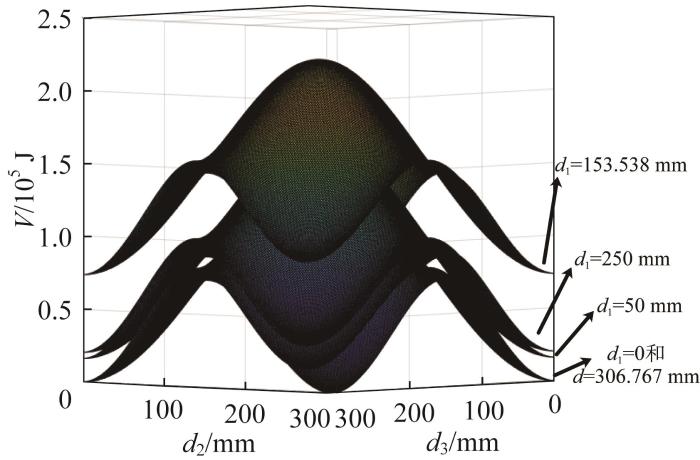
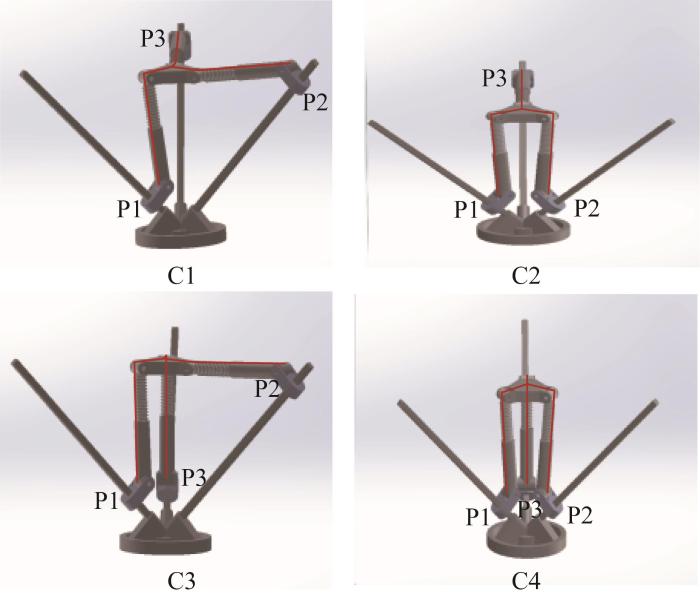
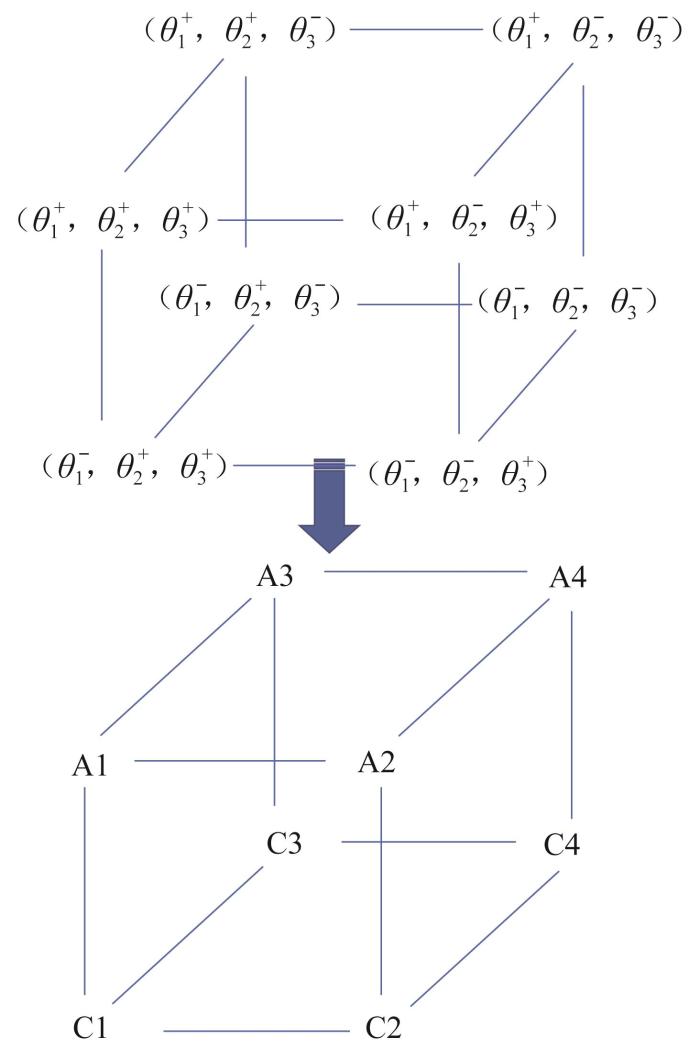
Spatial parallel multi-stable mechanism (SPMM) is a mechanism that can switch to different stable equilibrium states under external forces. It is a combination of traditional spatial rigid parallel mechanisms and compliant mechanisms, which is more stable and can save energy. The 6-DOF 3-PSPS SPMM with eight kinds of steady-state configurations was innovatively designed by using the rigid body substitution method. By moving three branches, eight kinds of steady-state configurations of the mechanism could be switched. Firstly, the SPMM structure was analyzed, the mechanism statics analysis was carried out, the energy-kinematic differential equation was established to determine the steady-state of the mechanism, and the energy diagram of the mechanism's motion process was obtained by MATLAB software. Secondly, using the energy method based on Lagrange-Dirichlet principle, eight steady-state configurations of the mechanism were determined, and the switching paths between the steady-state configurations were analyzed. Finally, the 3D printed SPMM model was used for experimental verification. The SPMM can realize steady-state configuration control and can be widely used in the design of motion platform and buffer mechanism.
LI Baokun, LI Lin, ZHAO Wei, TAO Zhenyu. Design and analysis of spatial parallel multi-stable mechanism[J]. Chinese Journal of Engineering Design, 2025, 32(2): 191-198 doi:10.3785/j.issn.1006-754X.2025.04.149
多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1]。该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变。相比传统的刚性机构,柔顺机构具有一定的优势。它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动。3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等。RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构。多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用。
Compliant manipulator design method (COMAD) for the type synthesis of all serial and parallel multi-DoF compliant mechanisms, with example of a Schönflies motion generator
[J]. Mechanism and Machine Theory, 2023, 186: 105342.
... 多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1].该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变.相比传统的刚性机构,柔顺机构具有一定的优势.它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动.3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等.RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构.多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用. ...
3-PSS柔性并联微操作机器人运动学及工作空间分析
1
2022
... 多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1].该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变.相比传统的刚性机构,柔顺机构具有一定的优势.它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动.3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等.RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构.多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用. ...
Synthesis of precision serial flexure systems using freedom and constraint topologies (FACT)
1
2011
... 多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1].该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变.相比传统的刚性机构,柔顺机构具有一定的优势.它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动.3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等.RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构.多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用. ...
Synthesis of multi-degree of freedom, parallel flexure system concepts via freedom and constraint topology (FACT). Part Ⅱ: Practice
1
2010
... 多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1].该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变.相比传统的刚性机构,柔顺机构具有一定的优势.它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动.3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等.RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构.多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用. ...
Compliant manipulator design method (COMAD) for the type synthesis of all serial and parallel multi-DoF compliant mechanisms, with example of a Sch?nflies motion generator
1
2023
... 多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1].该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变.相比传统的刚性机构,柔顺机构具有一定的优势.它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动.3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等.RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构.多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用. ...
Design of flexure-based precision transmission mechanisms using screw theory
1
2013
... 多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1].该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变.相比传统的刚性机构,柔顺机构具有一定的优势.它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动.3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等.RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构.多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用. ...
1
2013
... 多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1].该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变.相比传统的刚性机构,柔顺机构具有一定的优势.它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动.3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等.RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构.多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用. ...
A constant-force bistable mechanism for force regulation and overload protection
1
2011
... 多稳态柔顺机构是一种新型机构,其利用结构的弹性变形来传递力、运动或能量[1].该机制可以使机构通过储存或释放自身柔性部件的能量实现不同稳定平衡状态之间的转变.相比传统的刚性机构,柔顺机构具有一定的优势.它们可进行可重复运动,通过结构的弹性变形使得总机构的运动范围减小,因此能实现小范围的大行程和小行程运动.3种常见的柔顺机构设计方法包括基于约束的设计[2]、伪刚体模型法[3]和拓扑综合设计[4],此外还有刚体置换(rigid body replacement, RBR)方法[5]和基于螺杆理论的方法[6]等.RBR方法是将刚性机构中的关节替换为各种柔顺关节;不考虑机构的驱动,而是用于类型合成,以获得非驱动机械结构.多稳态柔顺机构在过载保护[7]、形状重构[8]、宽带振动能量采集[9]以及在微操作系统和超材料[10]等领域得到了广泛应用. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}