


对于不同的应用场景,具有地面移动和空中飞行能力的机器人可适应复杂环境并能执行不同任务。多样化的能力可以延长和扩展机器人的操作时间和操作范围,现已成功研制出许多兼具地面移动和空中飞行能力的两栖机器人。朱航等[7]设计的微小型陆空两栖机器人、Latscha等[8]设计的四轮陆空两栖机器人的结构强度高,控制简单,稳定性好,但其本体占用空间大,不适合在狭小空间内作业。Wang等[9]设计了一种四轮陆空变形两栖机器人,将桨叶固定在驱动轮内部,通过驱动轮和变形机构来实现机器人地面模式和飞行模式的切换,该机器人的变形机构结构简单且坚固,但其在地面模式下的机动性差,无法适应曲折的道路环境,仅能通过飞行来避障。
为此,笔者拟设计一种陆空结合的独特小型变形两栖机器人,可适用于多功能应用场景。例如:在火灾或化学品泄漏现场,可使用搭载在机器人上的传感器来监测危险物质的扩散情况,同时机器人还可在空中搜寻受困者,以完成救援任务;在军事领域,可利用机器人侦察和监视战场环境,以获取敌方阵地或战略目标等重要信息。该小型陆空变形两栖机器人采用2种运动模式相结合的设计方案[10-12],即地面两轮车辆与四旋翼无人机相结合。在地面上移动时,机器人采用两轮驱动方式;在空中飞行时,机器人采用四旋翼驱动方式[13-15]。当机器人从地面模式切换为飞行模式后,可轻易避开障碍物,到达目的地。此外,该机器人具有机械结构简单、体积小、坚固耐用、转向灵活、可操控性强和续航时间长等优势。本文所开展的工作如下:首先,对所设计机器人的结构进行介绍;然后,建立机器人模式切换的运动学模型[16];最后,利用机器人物理样机开展性能测试并进行能量分析,以验证其设计的有效性。
1 两栖机器人结构设计
1.1 机器人原理设计
图1
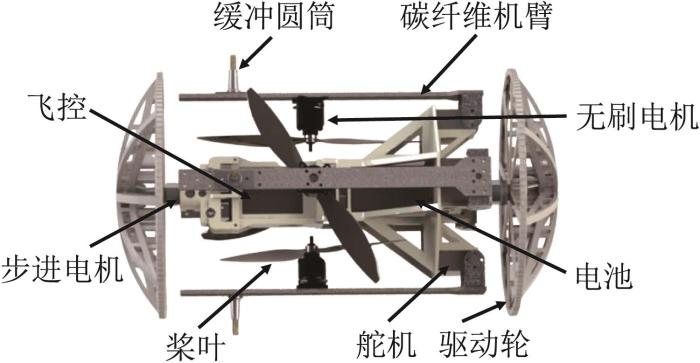
图1
小型陆空变形两栖机器人整体结构
Fig.1
Overall structure of small land-air deformable amphibious robot
图2
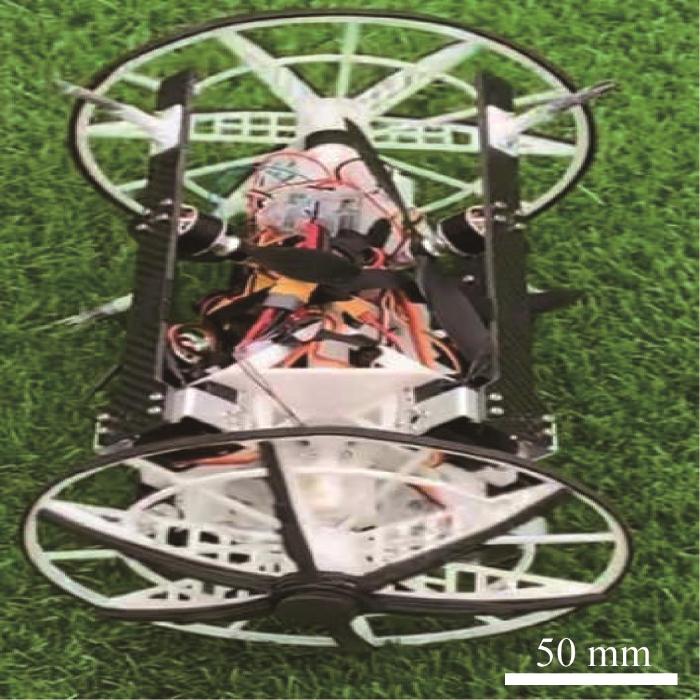
图2
小型陆空变形两栖机器人物理样机
Fig.2
Prototype of small land-air deformable amphibious robot
小型陆空变形两栖机器人整体呈圆柱形,两侧为半球形状,如此设计可使机器人具有较高的空间定位能力和控制精度。该机器人的运动模式分为地面模式和飞行模式,通过倾转机构的支撑、伸展可实现2种模式的切换。
1)地面模式。机器人采用两轮差速驱动的方式来实现地面移动。2个驱动轮均为转向轮,在地面模式下位于机器人两侧,且独立配置步进电机,可单独控制。这样设计不仅可使机器人能够在紧凑的空间内灵活地前进、后退和转弯,以免被障碍物卡住,还能极大程度地减小机器人的质量,延长续航时间。
2)飞行模式。机器人采用四旋翼驱动的方式来实现空中飞行。机器人的4条机臂上均安装无刷电机,每个无刷电机配置桨叶。飞行状态下的四旋翼结构通过舵机驱动机臂来实现,即机臂伸展并维持成水平“X”形状态。这种飞行结构设计十分通用,具有结构简单、机动性强等优点。
3)模式切换。机器人的模式切换有2种:一种是从地面模式切换为飞行模式的正切换,另一种是从飞行模式切换为地面模式的逆切换。
当机器人从地面模式切换为飞行模式时,4条机臂同时从中心轴四周伸展出来并接触地面,以提供支撑力;同时,通过舵机精确的转动控制来实现机器人从水平状态到竖直状态的转变。当机器人处于竖直状态,即机臂支撑并平行地面时,完成正模式切换。
当机器人从飞行模式切换为地面模式时,舵机驱动机臂向内收缩,使得机器人重心发生变化,开始朝一侧倾倒,逐渐从竖直状态转变为水平状态,即从最初的4条机臂支撑地面切换为2条机臂支撑地面。当机器人的所有机臂收缩至与地面平行,并以两轮支撑地面时,完成逆模式切换。
上述模式切换设计使得机器人具有以下显著优点:1)相较于同类机器人,该机器人的体积较小,能够在狭小空间内灵活穿梭;2)该机器人的核心部件可集成在中心位置处,实现良好的保护作用;3)该机器人能在较为恶劣的环境中运行,具备较强的环境适应能力。
1.2 控制系统设计
小型陆空变形两栖机器人的控制系统由多个模块组成[17-18],如图3所示。在这些模块的协同作用下,可实现机器人地面模式、飞行模式和模式切换的兼容适配。其中,主控模块是机器人的核心部件,搭载机器人操作平台,用于控制各个模块的交互、发送指令给其他模块以及处理回传数据,主要包含陀螺仪、惯性测量单元(inertial measurement unit, IMU)、气压计和磁罗盘等元器件。操控模块可实现地面站与机器人的无线通信,可通过遥控器远程控制机器人。地面模块和飞行模块分别用于控制机器人的地面移动和空中飞行:当切换为地面模式时,地面模块通过控制步进电机的输出来实现驱动轮的转动;当切换为飞行模式时,飞行模块通过控制无刷电机的输出来实现飞行。变形模块用于实现机器人运动模式的选择,即利用舵机实现不同模式之间的切换。电源模块用于为机器人各模块供电,以及监测不同运动模式下机器人的能量消耗。感知模块用于实现对外界环境信息的读取,以及监测地面模式和飞行模式下的实时运动数据。例如:摄像头用于拍摄视频和照片,以记录运动画面;GPS(global positioning system,全球定位系统)用于机器人的定位与位置校准。
图3
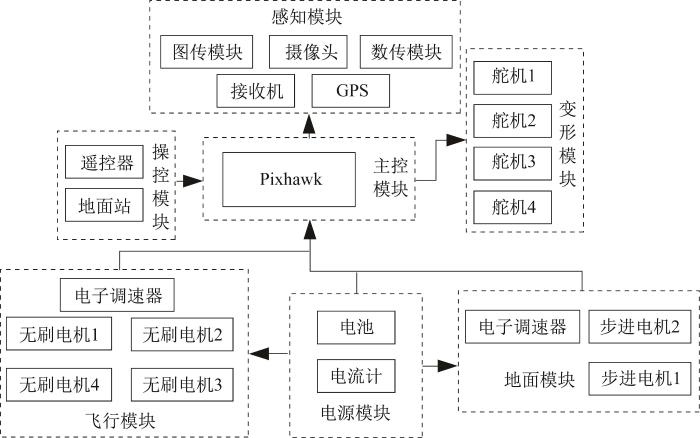
图3
小型陆空变形两栖机器人控制系统模块
Fig.3
Module of control system for small land-air deformable amphibious robot
1.3 机臂设计
小型陆空变形两栖机器人在地面模式下采用双轮驱动设计,但驱动轮转动时内侧的中心轴易发生空转;在飞行模式下双轮采用半球体凸起设计,但当机臂平行并高于地面时,机器人处于竖直状态,易发生倾倒。为此,在机臂末端设置4个缓冲圆筒,以防止机器人在地面上移动时驱动轮内侧的中心轴空转,同时为飞行状态下的机器人提供支撑固定作用。
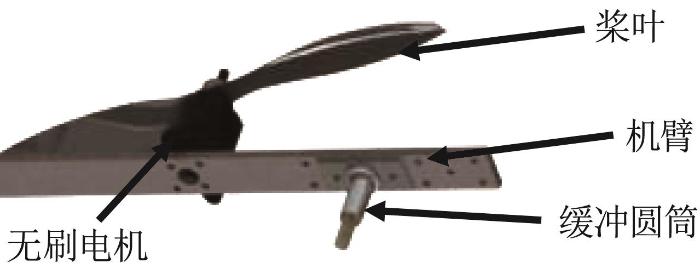
机臂采用碳纤维材料制作而成,其三维模型如图4所示。机臂的内侧安装无刷电机,外侧安装缓冲圆筒。缓冲圆筒由圆筒和聚丙烯丝组成,聚丙烯丝填充于圆筒内。聚丙烯丝的硬度较高,不易变形,且与地面的接触摩擦力小。缓冲圆筒的长度刚好等于机器人待飞前机臂离地面的高度,为7 cm。
图4
1.4 无刷电机和桨叶选型设计
飞行动力系统是两栖机器人的重要组成部分,决定了机器人的飞行性能。本文小型陆空变形两栖机器人飞行动力系统的硬件主要由无刷电机、桨叶和电池构成,这些零部件应兼容并适配。因此,选择性能参数适配的无刷电机和桨叶十分重要。
1.4.1 无刷电机数学模型
机器人飞行时的升力是由无刷电机带动桨叶旋转提供的。无刷电机的数学模型可表示为:
其中:
式中:
当输出电流达到最大时,无刷电机的输出扭矩
式中:
无刷电机的输入功率Pin和输出功率Pout可分别表示为:
联立
1.4.2 桨叶数学模型
桨叶的数学模型可表示为:
式中:F为桨叶旋转过程中所受的拉力;
在无刷电机的带动下,桨叶的力效
机器人飞行动力系统的整体性能取决于无刷电机和桨叶的匹配程度,其总力效
1.4.3 无刷电机和桨叶的尺寸参数确定
图5
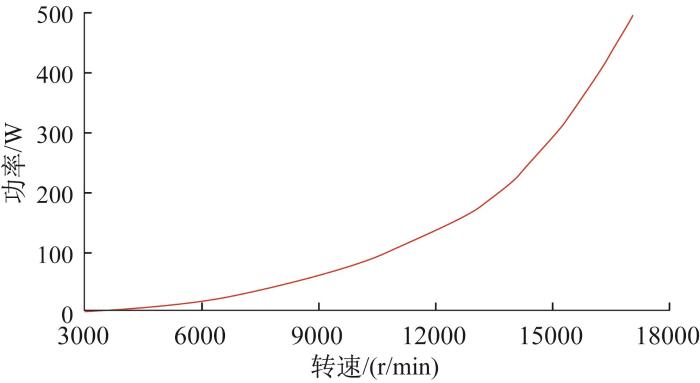
图5
桨叶功率与转速的关系曲线
Fig.5
Relationship curve between power and rotation speed of propeller
图6
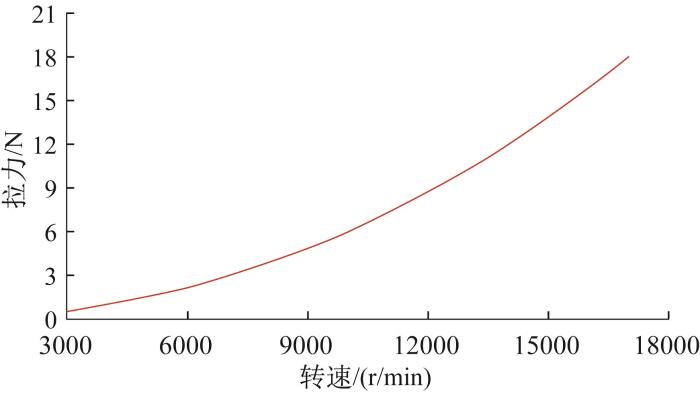
图6
桨叶拉力与转速的关系曲线
Fig.6
Relationship curve between pulling force and rotation speed of propeller
四旋翼飞行器的推重比设计为1.8倍时的性能最佳,因此本文机器人也采用该设计方案。通过计算可得,机器人需要的拉力为9 N。由图6可知,当桨叶的转速为12 000 r/min时,机器人的拉力性能满足要求。因无刷电机的转速与桨叶相同,将n1=12 000 r/min代入
机器人无刷电机轴距的最优尺寸[19]应满足:
式中:
将转速12 000 r/min和桨叶长度20.32 cm代入式(9),可得无刷电机的轴距为33 cm。
2 两栖机器人模式切换的运动学分析
为方便分析小型陆空变形两栖机器人的模式切换过程,将其旋转轨迹设定在同一竖直平面内:正模式切换(地面模式—飞行模式)时机器人逆时针旋转90°;逆模式切换(飞行模式—地面模式)时机器人顺时针旋转90°。2种模式切换过程正好相反,下文将以图7所示的正模式切换过程为例,对所设计机器人的模式切换过程进行运动学分析。
图7

图8
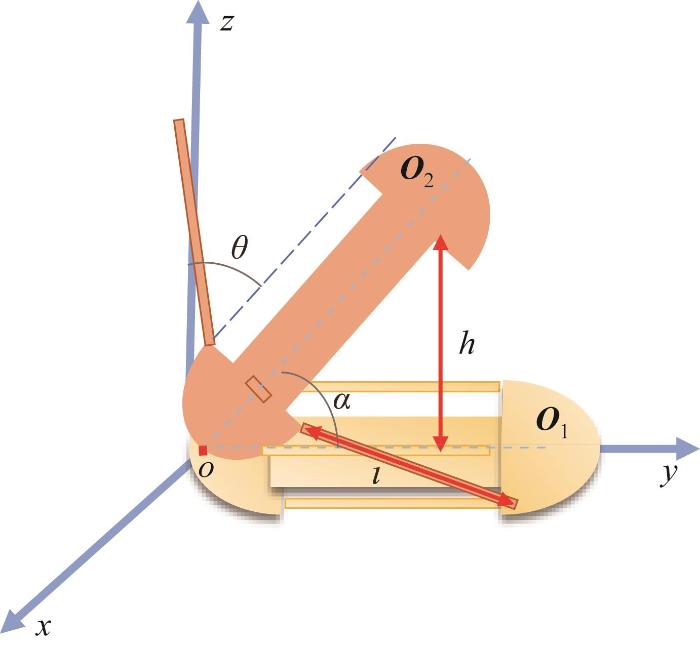
图8
机器人正模式切换的三维运动学模型
Fig.8
Three-dimensional kinematics model of robot positive mode switching
根据图8,机器人的正模式切换过程可看作绕
为简化分析机器人的模式切换过程,选取机臂的转动过程进行分析。在初始地面模式下,机器人机臂末端位置矩阵
式中:
在机器人从地面模式切换为飞行模式的过程中,舵机转动的同时带动机臂转动至与地面接触,从而为机器人提供支撑力。因此,机臂的转动角度与舵机的转动角度相同,可表示为:
式中:
从图9所示的右驱动轮视图下的机器人正模式切换过程可以看出,机器人的4条机臂始终保持两两垂直状态,其中各机臂与x轴和y轴的夹角均为45°,则切换过程中机臂的投影长度
图9
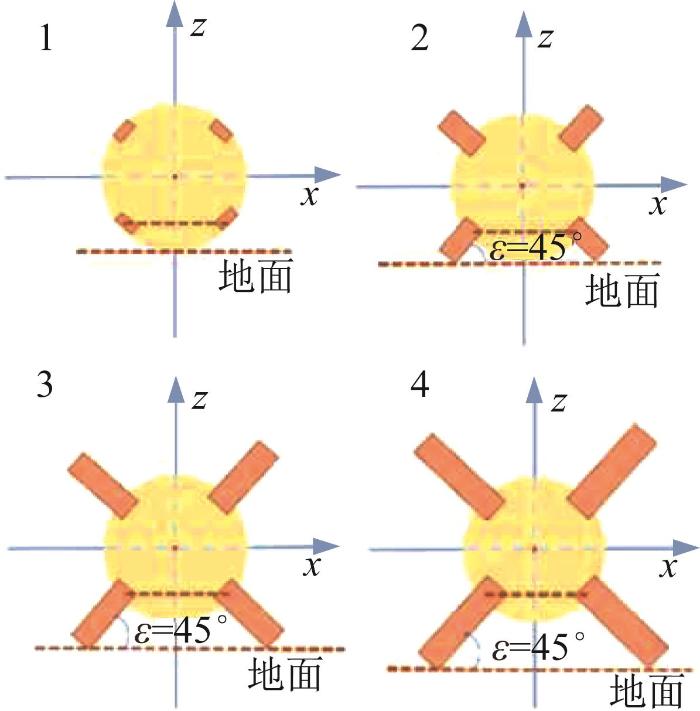
图9
右驱动轮视图下机器人的正模式切换过程
Fig.9
Positive mode switching process of robot in the view of right drive wheel
结合图8中机器人中心轴与机臂投影长度的几何关系可以得到,在机器人正模式切换过程中,中心轴的上升高度
根据机器人中心轴的上升高度h与2个驱动轮中心的距离的几何关系,可得中心轴的转动角度
式中:l2为2个驱动轮中心的距离。
结合
机器人从飞行模式切换为地面模式的过程恰好是上述切换过程的逆过程,通过
机器人的重心大致位于距离左驱动轮中心的
式中:F为机臂拉力;L为机臂的力臂;m为机器人的质量。
3 两栖机器人性能评价
为测试小型陆空变形两栖机器人的实际运动性能,根据上文确定的尺寸及性能参数,搭建机器人物理样机,其参数如表1所示。利用机器人物理样机开展相关实验,以测试其运行性能和续航时间。
表1 机器人物理样机的尺寸及性能参数
Table 1
| 参数 | 量值 |
|---|---|
整机尺寸 (长×宽×高) | 地面模式:356 mm×205 mm×205 mm 飞行模式:534 mm×535 mm×356 mm |
| 驱动轮直径 | 205 mm |
| 质量 | 1 820 g |
| 飞行高度 | 18 m |
3.1 机器人模式切换实验
为了验证小型陆空变形两栖机器人模式切换的可行性,根据上文构建的运动学模型,先对舵机输出扭矩进行MATLAB仿真分析,再利用机器人物理样机开展模式切换实验,通过测量机臂拉力间接获得舵机的输出扭矩。
图10
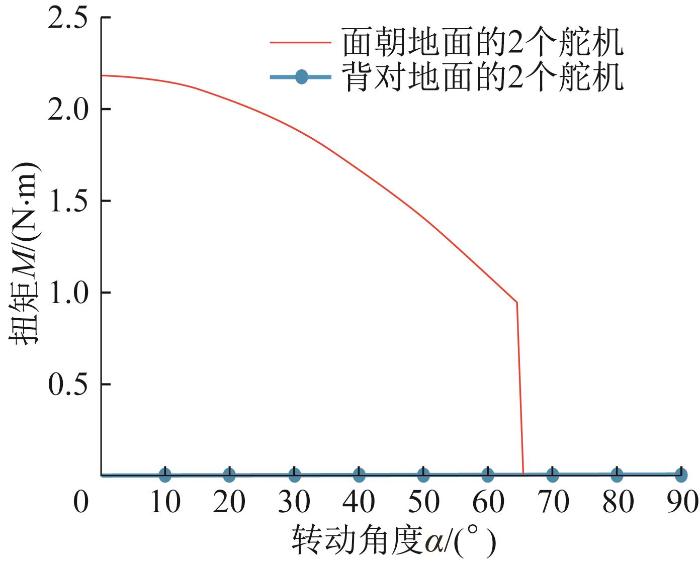
图10
正模式切换过程中舵机扭矩输出仿真曲线
Fig.10
Simulation curves of servo torque output during positive mode switching process
图11
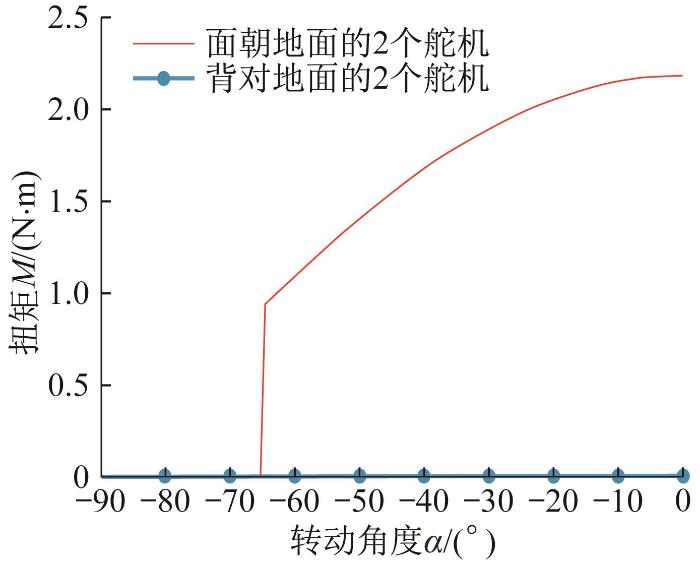
图11
逆模式切换过程中舵机扭矩输出仿真结果
Fig.11
Simulation curves of servo torque output during inverse mode switching process
图12和图13所示分别为机器人物理样机正、逆模式切换过程中机臂的拉力输出值,拉力测量点位于机臂与地面接触处,拉力方向与机臂垂直。从图12中可以看出,在正模式切换过程中,初始状态下面朝地面的2个舵机输出的拉力为11.16 N,然后逐渐减小;当拉力变为5.11 N时,机器人机身整体的重心发生改变,而后拉力突变为0 N;背对地面的2个舵机的拉力一直为0 N。从图13中可以看出,在逆模式切换过程中,面朝地面的2个舵机的初始拉力为0 N,当机身整体重心发生改变时,拉力突变为5.09 N,而后逐渐增大到11.39 N。根据测量得到的机臂拉力,计算舵机的输出扭矩并与仿真结果进行对比,两者大致相同。结果表明,该机器人可满足模式切换的要求。
图12
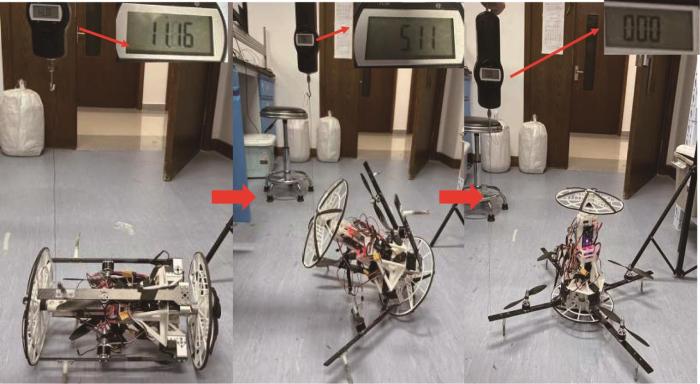
图12
正模式切换过程中舵机的拉力变化情况
Fig.12
Changes of tension force of servo during positive mode switching process
图13
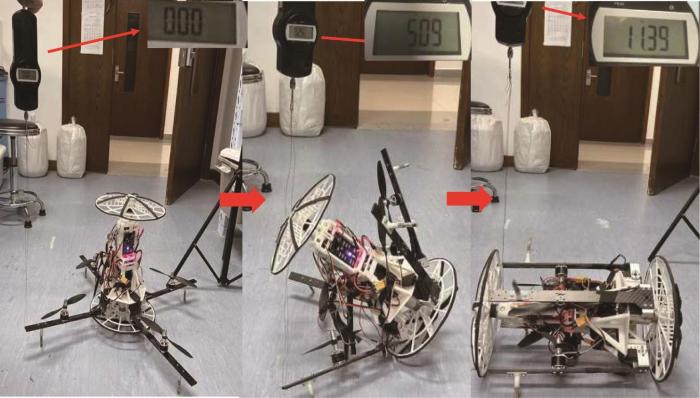
图13
逆模式切换过程中舵机的拉力变化情况
Fig.13
Changes of tension force of servo during inverse mode switching process
完整的机器人物理样机模式切换实验结果如图14所示。观察前6张图所示的机器人从地面模式切换为飞行模式的过程可知,随着舵机驱动机臂慢慢向外展开,机器人由原先双轮支撑转变为右侧驱动轮和双机臂支撑,此时机器人的中心轴以右驱动轮为支点,从水平状态切换为竖直状态,机体状态也随之改变。当中心轴的转动角度达到约63°时,机器人重心发生改变,自动调整到竖直状态。当机臂与中心轴内侧的夹角为90°时,正模式切换完成。观察后3张图所示的机器人从飞行模式切换为地面模式的过程可知,机器人的中心轴随着机臂的向内收拢开始倾斜,逐渐从竖直状态变回水平状态。当机臂与中心轴内侧的夹角从90°减小到0°时,机器人恢复为地面模式。通过实验测试,机器人能平稳、连贯地完成模式切换,验证了机器人设计的有效性。
图14
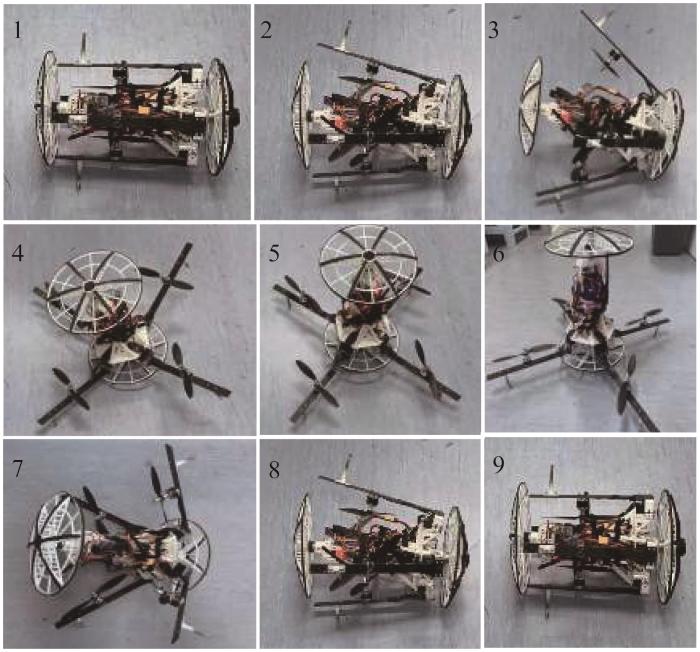
图14
机器人物理样机模式切换实验结果
Fig.14
Experimental results of mode switching of robot prototype
3.2 机器人续航性能测试实验
为比较小型陆空变形两栖机器人在地面模式和飞行模式下的续航性能,采用相同容量的电池,对2种模式下机器人的续航时间和移动距离进行测试。如表2所示,在耗尽满电电池电量的情况下,飞行模式下机器人可持续飞行约900 s,而地面模式下机器人可持续移动约10 200 s。经计算,地面模式下的续航时间是飞行模式的11.3倍;地面模式下的移动距离是飞行模式的3倍。
表2 机器人物理样机续航性能参数
Table 2
| 续航性能参数 | 地面模式 | 飞行模式 |
|---|---|---|
| 运行时间/min | 170 | 15 |
| 运动距离/m | 4 080 | 1 350 |
| 平均速度/(m/s) | 0.4 | 1.5 |
3.3 机器人户外性能测试实验
为了进一步验证小型陆空变形两栖机器人整体设计的合理性,利用搭建的物理样机开展完整的户外性能测试。如图15所示,在测试草地上,机器人先以地面模式进行移动,转弯后到达指定起飞定点。然后,机器人在起飞定点处进行模式切换,即切换为飞行模式,在空中完成设定的悬停后成功降落到预设定点,降落到草地上后机器人又从飞行模式切换为地面模式,并在双轮驱动下继续前进,直至到达目的地。但在实际测试过程中,机器人切换模式时机臂转动的响应速度比理论上慢。可能是由装配误差等干扰因素导致的。不过,机器人仍可以按照设定轨迹完成运动,整体满足预期设计的要求。
图15

4 结束语
本文设计了一种能够实现地面模式与飞行模式相互切换的小型陆空变形两栖机器人,并通过运动学建模,为其关键参数的设计提供了重要参考。研究过程及结果如下。
1)建立了小型陆空变形两栖机器人的运动学模型,并推导了其模式切换的运动学方程。
2)小型陆空变形两栖机器人模式切换的仿真结果与实验结果基本一致。结果表明,机器人模式切换满足要求,所构建的运动学模型能准确反映实际情况。
3)通过实验验证了小型陆空变形两栖机器人多运动模式的有效性。相比于飞行模式,地面模式下机器人的能量消耗大幅下降,即地面模式下机器人的续航性能和机动性更佳。
未来,笔者将对该机器人的模式切换方式进行进一步优化,使飞行模式和地面模式之间的切换过程更加平滑和稳定;同时,对机器人进行轻量化设计,以提高其地面移动性能和空中飞行性能。
参考文献
作业型飞行机器人研究现状与展望
[J].
Survey on aerial manipulator systems
[J].DOI:10.13973/j.cnki.robot.2015.0628 [本文引用: 1]
ARSS: a novel aerial robot performs tree pruning tasks
[J].
Collaborative mapping of an earthquake damaged building via ground and aerial robots
[J].
救灾机器人的研究现状与煤矿救灾的应用
[J].
Research status of the disaster rescue robot and its applications to the mine rescue
[J].DOI:10.13973/j.cnki.robot.2006.03.021 [本文引用: 1]
一种新型可变形轮腿式机器人的设计与分析
[J].
Design and analysis of a novel deformable wheel-legged robot
[J].DOI:10.3901/jme.2022.03.065 [本文引用: 1]
Motion planning and simulation of combined land-air amphibious robot
[J].
微小型陆空两栖机器人地面移动控制方法
[J].
Terrestrial locomotion control method of miniature land-air hybrid robot
[J].DOI:10.16652/j.issn.1004-373x.2015.08.043 [本文引用: 1]
Design of a hybrid exploration robot for air and land deployment (H.E.R.A.L.D) for urban search and rescue applications
[C]//
Design and modeling of a novel transformable land/air robot
[J].
基于多传感器融合的陆空两栖机器人移动控制系统设计
[J].
Design of mobile control system for air-ground amphibious robot based on multi-sensor fusion
[J].DOI:10.3969/j.issn.1671-1815.2020.08.024 [本文引用: 1]
Driving and tilt-hovering: an agile and manoeuvrable aerial vehicle with tiltable rotors
[J].
陆空两栖机器人飞行控制系统设计
[J].
Control of an air-ground amphibious vehicle flight system
[J].DOI:10.15918/j.tbit1001-0645.2015.12.009 [本文引用: 1]
并联六轮腿机器人机身平稳性控制方法研究
[J].
Research on stability control method of parallel six-wheel-legged robot
[J].DOI:10.3901/jme.2021.21.034 [本文引用: 1]
可变形飞行器快速总体设计方法研究与算法实现
[J].
Research and algorithm implementation of rapid overall design method for morphing aircraft
[J].
Modelling and control of a large quadrotor robot
[J].
多旋翼固定翼无人机多体动力学建模
[J].
Modeling and simulation for multi-rotor fixed-wing UAV based on multibody dynamics
[J].DOI:10.3969/j.issn.1000-2758.2019.05.010 [本文引用: 1]
多旋翼飞行器建模与控制器设计
[J].
Incident edge detection technology of sensor network for environment monitoring
[J].DOI:10.3969/j.issn.1671-1815.2021.17.029 [本文引用: 1]
基于系统架构的典型四旋翼无人机设计
[J].
Design of typical quadrotor UAV based on system architecture
[J].
四旋翼倾转飞行器操纵冗余设计
[J].
Design of redundant manipulation for quad tilt rotor aircraft
[J].DOI:10.16356/j.1005-2615.2020.02.011 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}