塔机(塔式起重机)多应用于高层建筑施工现场的材料运输。由于施工现场复杂因素的影响,塔机的负载常常会出现摆动现象,使得其运输安全性受到威胁[1 -2 ] 。此外,塔机的智能化、自动化等问题也越来越受关注[3 ] 。
塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大。由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] 。Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果。Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证。由此可见,消除跟踪误差是塔机防摆控制中的重要环节。针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿。肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振。Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想。扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题。将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态。赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动。此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] 。凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性。赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度。相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性。
针对部分工况下塔机负载摆角直接测量困难、系统滑模控制器抖振明显、控制器参数调节复杂等问题,笔者提出一种基于改进FOA(improved FOA, IMFOA)的塔机自适应滑模控制方法。首先,建立塔机单摆系统的动力学模型,研究其在作变幅运动时负载的摆动控制。然后,设计用于观测负载摆动状态的线性扩张状态观测器,并将其估计值反馈到自适应滑模控制器中;对自适应滑模控制器的滑模面进行重新构造,以减小抖振。接着,对FOA的寻优策略及搜索半径进行动态调整与改进,并将其应用于自适应滑模控制器的参数优化,以提升控制器的控制效果。最后,通过仿真和实验来验证所设计扩张状态观测器的跟踪观测效果以及优化后自适应滑模控制器的防摆效果。
1 塔机单摆系统的动力学模型
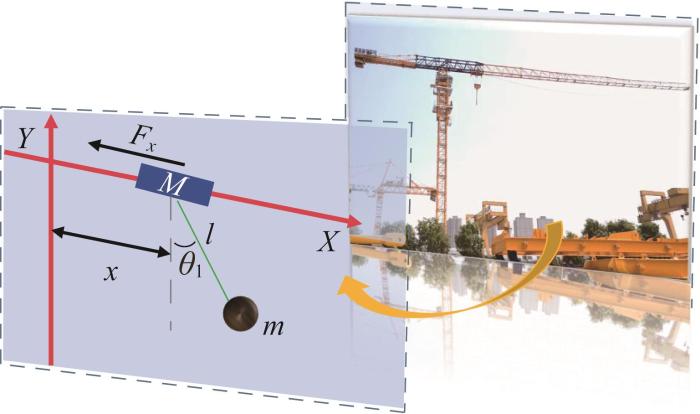
构建塔机单摆系统的动力学模型,寻求驱动力与负载摆角间的耦合关系,以将负载的摆动控制转化为对变幅小车的运动控制。塔机单摆系统的简化模型如图1 所示。图中:坐标系原点位于塔机机身与平衡臂、起重臂的交点中心处;M 和m 分别为变幅小车和负载的质量;F x X x l θ 1
图1
图1
塔机单摆系统简化模型
Fig.1
Simplified model of tower crane single pendulum system
运用拉格朗日方程建立塔机单摆系统的动力学模型。考虑到塔机的实际工况,建立模型前作如下假设。
假设1:由于受到重力的影响,在实际应用中负载总是保持在臂架下方工作,故摆角θ 1 θ 1 ≤ π 2 [23 ] 。
假设2:当负载接近平衡状态时,可认为c o s θ 1 = 1 s i n θ 1 = 0
根据图1 ,塔机单摆系统的动能T 和势能P 可分别表示为:
T = 1 2 M v M 2 + 1 2 m v m 2 = 1 2 M x ˙ M 2 + y ˙ M 2 + 1 2 m x ˙ m 2 + y ˙ m 2 = 1 2 x ˙ 2 M + m + 1 2 m 2 x ˙ l θ ˙ 1 c o s θ 1 + l 2 θ ˙ 1 2
P = - m g l c o s θ 1
x ˙ M = x ˙ y ˙ M = 0
x ˙ m = x ˙ + l ˙ s i n θ 1 + l θ ˙ 1 c o s θ 1 y ˙ m = - l ˙ c o s θ 1 + l θ ˙ 1 s i n θ 1
式中:v M 和v m 分别为变幅小车和负载的速度;x M 、y M 和x m 、y m 分别为变幅小车和负载的位置。
L = T - P = 1 2 x ˙ 2 M + m + 1 2 m l 2 θ ˙ 1 2 + 2 x ˙ l θ ˙ 1 c o s θ 1 + m g l c o s θ 1
d d t ∂ L ∂ x ˙ - ∂ L ∂ x = F x - F f x
d d t ∂ L ∂ θ ˙ 1 - ∂ L ∂ θ 1 = 0
式中:Ffx 为塔机作变幅运动时变幅小车受到的摩擦阻力。
根据文献[24 ],令F = F x - F f x F f x = f 1 t a n h x ˙ / ε x + f 2 x ˙ x ˙ f 1 、f 2 和ε x
M + m x ¨ + m l θ ¨ 1 c o s θ 1 - m l θ ˙ 1 2 s i n θ 1 = F
l θ ¨ 1 + x ¨ c o s θ 1 + g s i n θ 1 = 0
由于塔机单摆系统的动力学方程具有复杂非线性,直接对其进行分析会引入过多参数,故本文对其非线性部分进行线性化处理。根据实际情况,视负载处于平衡位置时为静止状态,即θ 1 = 0 ° s i n θ 1 = θ 1 c o s θ 1 = 1
x ¨ = m g M θ 1 + 1 M F
θ ¨ 1 = - M + m g M l θ 1 - 1 M l F
2 塔机防摆控制器设计
2.1 线性扩张状态观测器
针对部分工况下塔机负载摆角难以直接测量的问题,设计了一种线性扩张状态观测器,用于观测估计负载摆动状态,并将其反馈至自适应滑模控制器中,实现变幅小车的精确定位与负载防摆。
α ˙ 1 = α 2 α ˙ 2 = - M + m g M l α 1 - 1 M l F (8)
α ˙ = A α + B F y = C α (9)
α ˙ = α ˙ 1 α ˙ 2 α = α 1 α 2 A = 0 1 ϖ 0 B = 0 - 1 M l
C = 1 0 0 1 ϖ = - M + m g M l
z ˙ = A z + B F + L y - y ^ y ^ = C z (10)
式中: z α z = z 1 z 2 T y y ^ y L L = 3 ω 0 3 ω 0 2 T ω 0
定义 e α e = e 1 e 2 T e 1 = α 1 - z 1 e 2 = α 2 - z 2 式(9)和式(10)可得观测误差方程:
e ˙ 1 e ˙ 2 = - 3 ω 0 1 - 3 ω 0 2 + ϖ 0 e 1 e 2 (11)
令W 1 = e 1 W 2 = - 3 ω 0 e 1 + e 2 式(11)可表示为:
W ˙ 1 = W 2 W ˙ 2 = - 3 ω 0 2 W 1 - 3 ω 0 W 2 (12)
令a = 3 ω 0 b = 3 ω 0 2 W ˙ 2 = - b W 1 - a W 2 式(12)的特征方程为:a λ 2 + b λ = 0 λ 为特征根)。由Hurwitz定理可知,特征方程的根具有负实部的充要条件为[25 ] :a > 0 b > 0
根据巴尔巴辛公式,可得观测误差方程的Lyapunov函数V
V = 1 2 b W 2 2 + 1 2 a W 1 + W 2 2
V = 1 2 b W 2 2 + 1 2 a W 1 + W 2 2 ≥ 0
对Lyapunov函数V 式(12)代入可得:
V = - b 2 W 1 W 2 - a b W 2 2 - a b W 1 2 - b W 1 W 2
由此可知,V V ˙ < 0 e 1 = 0 、 e 2 = 0
2.2 自适应滑模控制器
s = x ˙ + γ 1 e x + γ 2 θ ˙ 1 + γ 3 θ 1 (13)
式中:γ 1 、 γ 2 和 γ 3 ex 为位置误差,e x = x - x p x p
s ˙ = x ¨ + γ 1 x ˙ + γ 2 θ ¨ 1 + γ 3 θ ˙ 1 (14)
s ˙ = γ 1 x ˙ + m g M - γ 2 M + m M l θ 1 + γ 3 θ ˙ 1 + l - γ 2 M l F (15)
F e q = M l γ 2 - l γ 1 x ˙ + m g M - γ 2 M + m g M l θ 1 + γ 3 θ ˙ 1 (16)
在式(16)中加入基于滑模面s ζ t a n h s ζ 为运动点趋近滑模面的速率),则滑模控制律可更新为:
F x s = M l γ 2 - l γ 1 x ˙ + m g M - γ 2 M + m g M l θ 1 + γ 3 θ ˙ 1 + ζ t a n h s (17)
采用的双曲正切函数ζ t a n h s
y ^ x = - Γ x η x T x ˙ (18)
η x ≜ t a n h x ˙ ε x x ˙ x ˙ T y x ≜ f 1 f 2 T
式中:y x y ^ x y x Γ x Γ x ∈ R 2 × 2
为了提高塔机系统的暂态性能,提出如下自适应控制律:
F x n = - ε 0 s + η x T y ^ x (19)
ε 0 = 1 + 1 / θ ˜ 1 - λ e - s θ ˜ 1 = θ 1 o - θ 1
式中:Fx n 为自适应控制器输出的驱动力;θ 1 o θ ˜ 1
自适应控制律能够实现相应的参数更新率递推,简化了控制器的设计步骤,结合式(17)与式(19),塔机防摆控制器可设计为:
F = F x n + F x s (20)
图2
图2
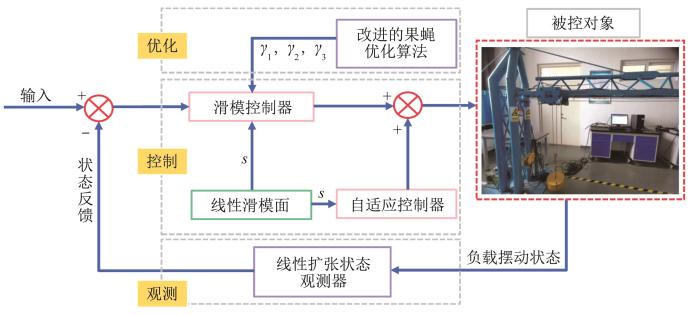
塔机防摆控制系统总体结构框图
Fig.2
Overall structure diagram of tower crane anti-swing control system
3 基于IMFOA 的塔机防摆控制器参数优化
FOA通过模拟果蝇种群的觅食行为来获得全局最优参数,其计算复杂性低且参数依赖性弱[26 ] ,故适用于参数优化。FOA的寻优原理如图3 所示。
图3
图3
FOA寻优原理
Fig.3
FOA optimization principle
步骤1 初始化果蝇种群的相关参数。果蝇个体i 在利用嗅觉搜索食物时,其位置Xi 、Yi 为:
X i = X a x i s + R d o m Y i = Y a x i s + R d o m
式中:X axis 、Y axis 为果蝇群体随机初始化位置;R dom 为果蝇个体的随机搜索距离。
步骤2 获取果蝇个体所在位置的味道浓度S s m e l l
S s m e l l = f i t n e s s S i
式中:S i
步骤3 种群中其他果蝇利用视觉飞向当前最优味道浓度S best 对应的果蝇个体位置,在位置更新后会形成新的果蝇种群中心。经过不断的迭代寻优,获得最优参数。
通过对比发现,标准FOA的多种改进方法着重强调个体之间的竞争,而忽略了种群协作的重要性。因此,本文对FOA的寻优策略实施动态调整:使2/3的果蝇沿原进化方向搜索,而其余果蝇以弧形曲线沿进化方向边缘环绕搜索,以此在丰富搜索路径多样性的同时加快寻优速度。通过判断果蝇个体位置与搜索方向矢量的直线距离的大小,同时考虑全局与局部间的协调因素来确定果蝇个体的新位置,可表示为:
X i + 1 = μ r d o m * + R φ π 180 , X i ≥ λ i Y i + 1 = μ r d o m * + R φ π 180 , Y i ≥ λ i
R = 1 n ∑ i = 1 n X i 2 + Y i 2
式中:λ i r d o m * R 为搜索半径;μ φ
此外,针对搜索半径随机性较大的问题,本文根据平均味道浓度来改变种群中1/3果蝇以弧形曲线进行边缘环绕的固定搜索半径,即确定新的搜索半径,以明确果蝇个体间的分工,增大个体搜索范围的差异性,扩大群体搜索范围的多样性。
R m i n = R S s m o R 1 = 1 - t T S s m l , i ∑ i = 1 n X i + 1 - X i 2 R m a x = 1 T S b e s t
式中:R min 、R 1 、R max 分别为最小搜索半径、当前搜索半径和最大搜索半径;S smo 、S sml, i t 和T 为当前迭代次数和最大迭代次数。
以上通过对标准FOA寻优策略及搜索半径进行优化,旨在提高算法的寻优速度和精度,尽可能地避免FOA易陷入局部最优解的典型缺陷,合理分散个体竞争以增强种群协作,划清分工,提高个体逃逸能力与局部开发能力,拓展新的进化路线。
4 塔机防摆控制器控制效果分析
4.1 线性扩张状态观测器的跟踪观测仿真
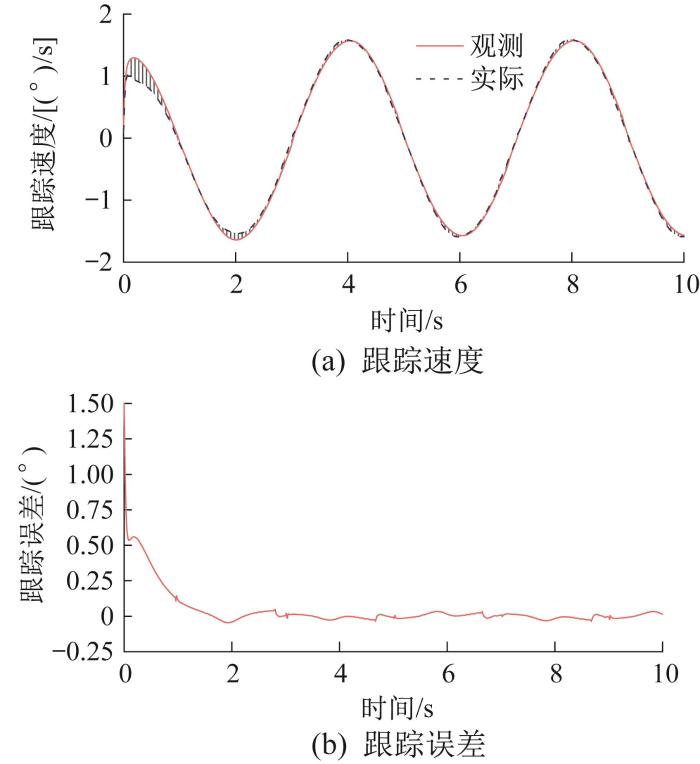
为验证所设计的线性扩张状态观测器的跟踪观测效果,利用MATLAB/Simulink软件进行仿真分析。第1组塔机单摆系统的参数选取如下:M =8 kg,m =6 kg,l =3 m。第1组参数下线性扩张状态观测器跟踪观测负载摆角的跟踪速度与跟踪误差如图4 所示。由图4 可知,所设计的线性扩张状态观测器可以较快的速度进行跟踪,跟踪误差在2 s内快速收敛至0º附近,2 s之后跟踪相对误差小于0.7%。
图4
图4
第1组线性扩张状态观测器跟踪观测仿真结果
Fig.4
The first group of linear extended state observer tracking observation simulation results
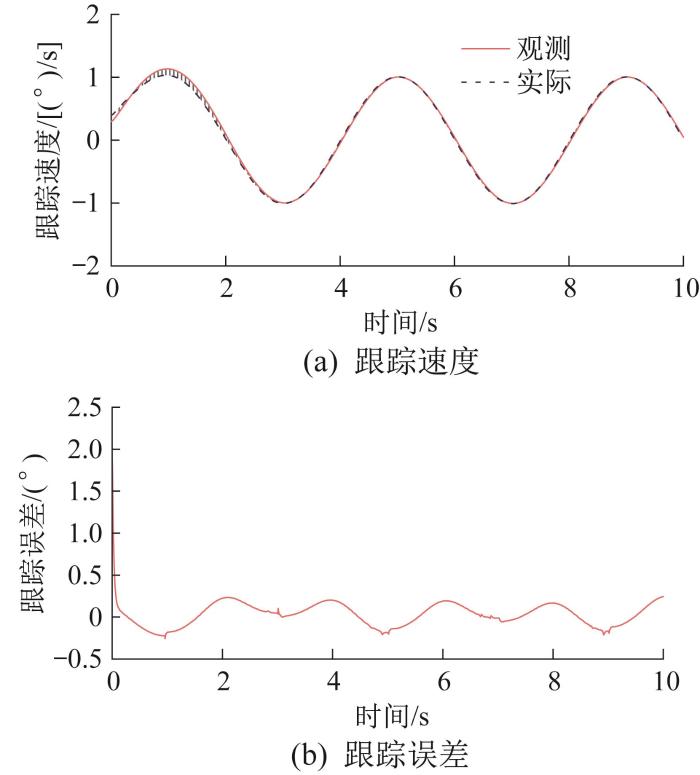
为了分析塔机单摆系统参数对线性扩张状态观测器跟踪观测效果的影响,开展第2组仿真,单摆系统的参数选取如下:M =6 kg,m =4 kg,l =5 m。第2组参数下线性扩张状态观测器跟踪观测负载摆角的跟踪速度与跟踪误差如图5 所示。由图5 可知,当变幅小车和负载的质量、绳索长度发生改变时,由于跟踪速度减慢,使得跟踪精度提高,跟踪误差的收敛速度变快,虽然在收敛至0º附近时出现了周期性震荡,但是整体上相对误差仍保持在1.3%以内,表明所设计的线性扩张状态观测器在系统参数变化时依然能保持较快的跟踪速度和较高的跟踪精度。
图5
图5
第2组线性扩张状态观测器跟踪观测仿真结果
Fig.5
The second group of linear extended state observer tracking observation simulation results
4.2 自适应滑模控制器的防摆控制效果分析
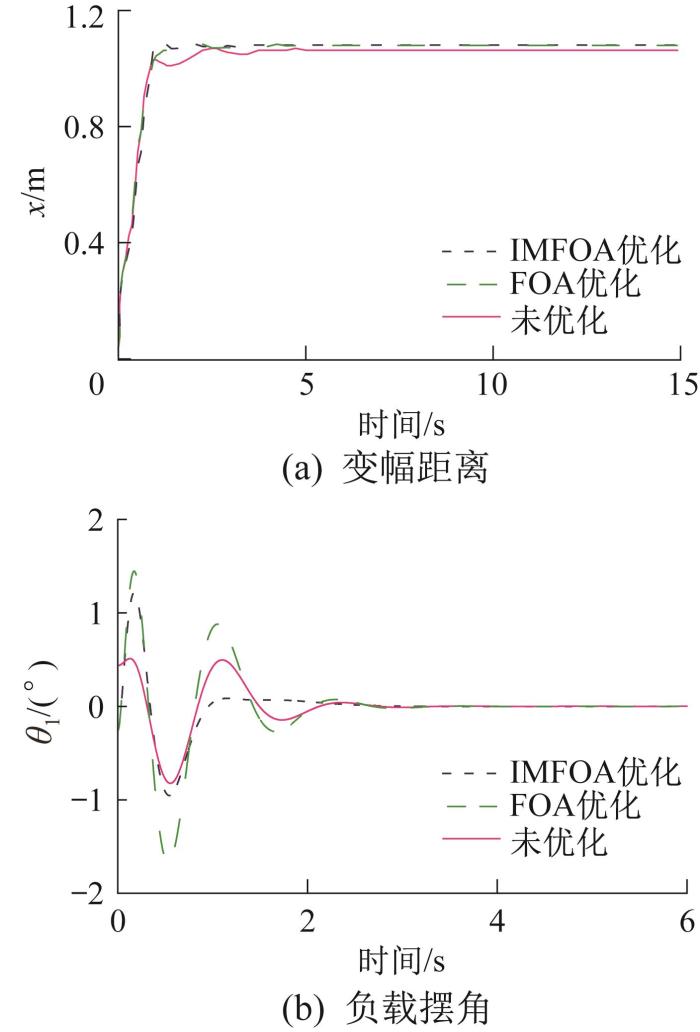
为进一步验证参数经IMFOA充分优化后的自适应滑模控制器的控制效果,选取参数未优化、经FOA优化和经IMFOA优化三种情况,开展塔机防摆控制仿真分析,并对不同情况下的控制效果进行对比。相关参数选取如下:M =8 kg,m =6 kg,l =3 m,g =9.8 m/s2 ,λ = 0.5 ε x = - 0.01 γ 1 = 0.54 γ 2 = 0.62 γ 3 = - 2.65 x p = 1 m 图6 所示,其控制性能对比如表1 所示。表中:小车到达位置用时代表塔机在实际工作时将货物运送至目标位置所用的时间;负载的最大摆角代表货物在运输过程中因启动制动等而引起的最大摆动角度;负载残余摆角及其收敛用时代表塔机运输货物时在摆动得到有效抑制后因惯性作用而产生的负载摆角及其基本恢复平衡状态所需的时间。
图6
图6
优化前后自适应滑模控制器控制效果的仿真结果对比
Fig.6
Comparison of control effect simulation results of adaptive sliding mode controller before and after optimization
根据图6 和表1 ,在滑模面重构后,所设计的自适应滑模控制器即使未优化参数,其也能在短时间内抑制负载的摆动,但经IMFOA优化后,该控制器对负载摆动的抑制效果显著提升,且加快了负载残余摆角的收敛速度;与此同时,变幅小车到达目标位置的精度得到提升且无明显超调。由此可见,IMFOA的寻优能力良好,对自适应滑模控制器参数的优化具有较好的适用性。从解决工程实际问题角度看,防摆控制器的应用有效降低了塔机运输中负载的摆动程度,缩短了摆动的持续时间,使得塔机运输安全性得到保障,运输效率得到一定程度的提高。
为了验证仿真分析的准确性,在实验室内利用同比缩小的塔机模型开展实验验证。首先,通过MATLAB/Simulink软件对控制板进行编译生成代码,设置采样周期为0.005 s;然后,通过串口记录控制板输出数据。控制板通过数/模转换器向电机驱动器发送设计电压信号以驱动电机,相应电压信号通过模/数转换器传回控制板。自适应滑模控制器控制效果的实验结果如图7 所示。对比图6 和图7 可知,由于外界环境干扰因素的存在,实验结果与仿真结果存在一定误差,但两者的相对误差保持在3.2 %以内,验证了仿真结果的准确性。后续通过仿真来对不同工况下自适应滑模控制器的其他控制性能进行分析。
图7
图7
优化前后自适应滑模控制器控制效果的实验结果对比
Fig.7
Comparison of control effect experimental results of adaptive sliding mode controller before and after optimization
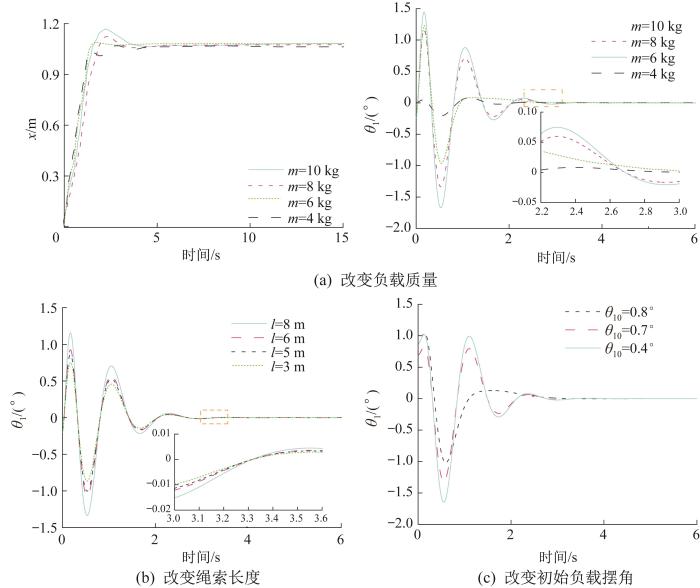
为了验证参数经IMFOA充分优化后自适应滑模控制器的鲁棒性,设计了3组仿真分析:1)负载质量改变;2)绳索长度改变;3)负载初始摆角改变。不同工况下自适应滑模控制器的控制效果如图8 所示。由图可知,在负载质量增大、绳索长度变长和负载初始摆角变大的情况下,负载摆角峰值虽增大,但仍保持在1.5° ° ° °
图8
图8
不同工况下自适应滑模控制器的控制效果对比
Fig.8
Comparison of control effects of adaptive sliding mode controller under different working conditions
为了验证参数经IMFOA充分优化的自适应滑模控制器的抗干扰性,在不改变任何参数的情况下,仅在摆动过程中和摆动停止后分别施加不同干扰信号并进行抗干扰性能仿真分析,结果如图9 所示。由图9 可以看出,5 s后负载摆角基本收敛至0° ° 2 °
图9
图9
干扰条件下自适应滑模控制器的控制效果
Fig.9
Control effect of adaptive sliding mode controller under interference condition
5 结 论
针对塔机负载摆角难以直接测量、系统滑模控制器抖振明显和控制器参数调节复杂等问题,设计了线性扩张状态观测器,并将观测结果反馈至自适应滑模控制器中进行状态跟踪。根据塔机单摆系统的特点,重新构造线性滑模面,并结合自适应控制算法减小滑模控制器的抖振。对标准FOA的寻优策略及搜索半径进行了改进,增强了其寻优能力及搜索速度,并运用IMFOA对自适应滑模控制器进行参数优化。结果表明,所设计的线性扩张状态观测器的跟踪误差小于1.3%;相较于优化前,参数经FOA优化的自适应滑模控制器的控制性能得到了提高,可以有效抑制塔机负载摆动,且其具有较好的快速性、抗干扰性和鲁棒性。
未来,将开展更加贴合实际的非线性塔机防摆控制的深入研究,并制作实验样机进行更全面的实验验证。
参考文献
View Option
[1]
[本文引用: 1]
WANG X CHEN Z M SHAO X J et al Anti-sway control for changing rope length tower crane based on sliding mode active disturbance rejection control
[J]. Journal of Mechanical & Electrical Engineering , 2023 , 40 (3 ): 444 -451 .
DOI:10.3969/j.issn.1001-4551.2023.03.017
[本文引用: 1]
[2]
陆峰 ,张义星 ,石怀涛 ,等 基于能量法的多自由度欠驱动塔机防摆控制
[J].控制工程 ,2023 ,30 (4 ):605 -612 .
[本文引用: 1]
LU F ZHANG Y X SHI H T et al Anti-swing control of underactuated tower crane with multiple degrees of freedom based on energy method
[J]. Control Engineering of China , 2023 , 30 (4 ): 605 -612 .
[本文引用: 1]
[3]
ZHANG M H ZHANG Y F JI B et al Adaptive sway reduction for tower crane systems with varying cable lengths
[J]. Automation in Construction , 2020 , 119 : 103342 .
[本文引用: 1]
[4]
LIU X N CAI T Variable coefficient active disturbance rejection control for crane system
[C]// Proceedings of the 38th Chinese Control Conference . Guangzhou, Jul . 27 -30 , 2019 .
[本文引用: 1]
[5]
JIANG W G DING L Y ZHOU C Digital twin: stability analysis for tower crane hoisting safety with a scale model
[J]. Automation in Construction , 2022 , 138 : 104257 .
[6]
LU B FANG Y C SUN N et al Anti swing control of offshore boom cranes with ship roll disturbances
[J]. IEEE Transactions on Control Systems Technology , 2018 , 26 (2 ): 740 -747 .
[7]
QIAN D W DING H LEE S G et al Suppression of chaotic behaviors in a complex biological system by disturbance observer-based derivative-integral terminal sliding mode
[J]. IEEE/CAA Journal of Automatica Sinica , 2020 , 7 (1 ): 126 -135 .
[8]
ZHAO X S HUANG J Distributed-mass payload dynamics and control of dual cranes undergoing planar motions
[J]. Mechanical Systems and Signal Processing , 2019 , 126 : 636 -648 .
[9]
SUN N LIANG D K WU Y M et al Adaptive control for pneumatic artificial muscle systems with parametric uncertainties and unidirectional input constraints
[J]. IEEE Transactions on Industrial Informatics , 2020 , 16 (2 ): 969 -979 .
[本文引用: 1]
[10]
LIU Z Q SUN N WU Y M et al Nonlinear sliding mode tracking control of underactuated tower cranes
[J]. International Journal of Control, Automation and Systems , 2021 , 19 (2 ): 1065 -1077 .
[本文引用: 1]
[11]
WU T S KARKOUB M YU W S et al Anti-sway tracking control of tower cranes with delayed uncertainty using a robust adaptive fuzzy control
[J]. Fuzzy Sets and Systems , 2016 , 290 : 118 -137 .
[本文引用: 1]
[12]
SUN N WU Y M CHEN H et al Anti-swing cargo transportation of underactuated tower crane systems by a nonlinear controller embedded with an integral term
[J]. IEEE Transactions on Automation Science and Engineering , 2019 , 16 (3 ): 1387 -1398 .
[本文引用: 1]
[14]
XIAO B YIN S Exponential tracking control of robotic manipulators with uncertain dynamics and kinematics
[J]. IEEE Transactions on Industrial Informatics , 2019 , 15 (2 ): 689 -698 .
[本文引用: 1]
[15]
赵兴强 ,刘振 ,高存臣 机械臂自适应神经网络滑模控制器设计
[J/OL].控制工程 :1 -6 [2022-11-15 ]..
URL
[本文引用: 1]
ZHAO X Q LIU Z GAO C C Adaptive neural network-based sliding mode controller design for manipulator systems
[J/OL]. Control Engineering of China :1 -6 [2022-11-15 ]. .
URL
[本文引用: 1]
[16]
DUMA R TRUSCA M DOBRA P Tuning and implementation of PID controllers using rapid control prototyping
[J]. Control Engineering and Applied Informatics , 2011 , 13 (4 ): 64 -73 .
[本文引用: 1]
[17]
ZHOU Y Q MIAO F H LUO Q F Symbiotic organisms search algorithm for optimal evolutionary controller tuning of fractional fuzzy controllers
[J]. Applied Soft Computing , 2019 , 77 : 497 -508 .
[18]
VERMA B PADHY P Robust fine tuning of optimal PID controller with guaranteed robustness
[J]. IEEE Transactions on Industrial Electronics , 2020 , 67 (6 ): 4911 -4920 .
[19]
CHEN H P BOWELS S ZHANG B et al Controller parameter optimization for complex industrial system with uncertainties
[J]. Measurement & Control , 2019 , 52 (7/8 ): 888 -895 .
[20]
EL-GENDY E M SAAFAN M M ELKSAS M S et al Applying hybrid genetic: PSO technique for tuning an adaptive PID controller used in a chemical process
[J]. Soft Computing , 2020 , 24 (5 ): 3455 -3474 .
[本文引用: 1]
[21]
[本文引用: 1]
FENG L Z WANG Y W HAN L L et al Double drive fruit fly optimization algorithm and its application in PID controller
[J]. Control and Decision , 2021 , 36 (9 ): 2225 -2233 .
DOI:10.13195/j.kzyjc.2020.0046
[本文引用: 1]
[23]
ZHANG M H ZHANG Y F CHENG X G An enhanced coupling PD with sliding mode control method for underactuated double-pendulum overhead crane systems
[J]. International Journal of Control, Automation and Systems , 2019 , 17 (6 ): 1579 -1588 .
[本文引用: 1]
[24]
OUYANG H M TIAN Z YU L L et al Motion planning approach for payload swing reduction in tower cranes with double-pendulum effect
[J]. Journal of the Franklin Institute , 2020 , 357 (13 ): 8299 -8320 .
[本文引用: 1]
[25]
[本文引用: 1]
ZHOU H WANG J Q WANG D D Grey stochastic multi-criteria decision-making approach based on Hurwicz with uncertain probability
[J]. Control and Decision , 2015 , 30 (3 ): 556 -560 .
DOI:10.13195/j.kzyjc.2014.0060
[本文引用: 1]
[26]
DU T S KE X T LIAO J G et al DSLC-FOA: improved fruit fly optimization algorithm for application to structural engineering design optimization problems
[J]. Applied Mathmatical Modelling , 2018 , 55 : 314 -339 .
[本文引用: 1]
基于滑模自抗扰控制的变绳长塔机防摆控制
1
2023
... 塔机(塔式起重机)多应用于高层建筑施工现场的材料运输.由于施工现场复杂因素的影响,塔机的负载常常会出现摆动现象,使得其运输安全性受到威胁[1 -2 ] .此外,塔机的智能化、自动化等问题也越来越受关注[3 ] . ...
基于滑模自抗扰控制的变绳长塔机防摆控制
1
2023
... 塔机(塔式起重机)多应用于高层建筑施工现场的材料运输.由于施工现场复杂因素的影响,塔机的负载常常会出现摆动现象,使得其运输安全性受到威胁[1 -2 ] .此外,塔机的智能化、自动化等问题也越来越受关注[3 ] . ...
基于能量法的多自由度欠驱动塔机防摆控制
1
2023
... 塔机(塔式起重机)多应用于高层建筑施工现场的材料运输.由于施工现场复杂因素的影响,塔机的负载常常会出现摆动现象,使得其运输安全性受到威胁[1 -2 ] .此外,塔机的智能化、自动化等问题也越来越受关注[3 ] . ...
基于能量法的多自由度欠驱动塔机防摆控制
1
2023
... 塔机(塔式起重机)多应用于高层建筑施工现场的材料运输.由于施工现场复杂因素的影响,塔机的负载常常会出现摆动现象,使得其运输安全性受到威胁[1 -2 ] .此外,塔机的智能化、自动化等问题也越来越受关注[3 ] . ...
Adaptive sway reduction for tower crane systems with varying cable lengths
1
2020
... 塔机(塔式起重机)多应用于高层建筑施工现场的材料运输.由于施工现场复杂因素的影响,塔机的负载常常会出现摆动现象,使得其运输安全性受到威胁[1 -2 ] .此外,塔机的智能化、自动化等问题也越来越受关注[3 ] . ...
Variable coefficient active disturbance rejection control for crane system
1
2019
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
Digital twin: stability analysis for tower crane hoisting safety with a scale model
0
2022
Anti swing control of offshore boom cranes with ship roll disturbances
0
2018
Suppression of chaotic behaviors in a complex biological system by disturbance observer-based derivative-integral terminal sliding mode
0
2020
Distributed-mass payload dynamics and control of dual cranes undergoing planar motions
0
2019
Adaptive control for pneumatic artificial muscle systems with parametric uncertainties and unidirectional input constraints
1
2020
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
Nonlinear sliding mode tracking control of underactuated tower cranes
1
2021
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
Anti-sway tracking control of tower cranes with delayed uncertainty using a robust adaptive fuzzy control
1
2016
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
Anti-swing cargo transportation of underactuated tower crane systems by a nonlinear controller embedded with an integral term
1
2019
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
机械臂固定时间观测器和自适应滑模控制方法的设计
1
2020
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
机械臂固定时间观测器和自适应滑模控制方法的设计
1
2020
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
Exponential tracking control of robotic manipulators with uncertain dynamics and kinematics
1
2019
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
机械臂自适应神经网络滑模控制器设计
1
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
机械臂自适应神经网络滑模控制器设计
1
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
Tuning and implementation of PID controllers using rapid control prototyping
1
2011
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
Symbiotic organisms search algorithm for optimal evolutionary controller tuning of fractional fuzzy controllers
0
2019
Robust fine tuning of optimal PID controller with guaranteed robustness
0
2020
Controller parameter optimization for complex industrial system with uncertainties
0
2019
Applying hybrid genetic: PSO technique for tuning an adaptive PID controller used in a chemical process
1
2020
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
双重驱动的果蝇优化算法及其在PID控制器中的应用
1
2021
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
双重驱动的果蝇优化算法及其在PID控制器中的应用
1
2021
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
基于果蝇优化算法的PID控制器设计与应用
1
2016
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
基于果蝇优化算法的PID控制器设计与应用
1
2016
... 塔机的工作环境复杂,部分工况下负载摆角难以直接测量,且外部干扰因素较多,导致其定位防摆难度增大.由于塔机系统的欠驱动性,使得其控制问题较为复杂,许多学者对此开展了大量研究[4 -9 ] .Liu等[10 ] 设计了一种非线性滑模跟踪控制器,其能在快速消除跟踪误差的同时抑制塔机负载摆动,具有良好的跟踪性能和摆动抑制效果.Wu等[11 ] 提出了一种基于H ∞ [12 ] 提出了一种改进的反馈控制器,通过构造积分项来补偿稳态误差,并对其防摆效果进行了实验验证.由此可见,消除跟踪误差是塔机防摆控制中的重要环节.针对非线性动力学系统模型内部参数的不确定性和外部未知状态对控制效果的干扰,可利用状态观测器来估计干扰,进而对干扰进行补偿.肖仁等[13 ] 在机械臂的轨迹跟踪控制中,利用固定时间观测器对外部扰动及关节状态进行观测估计,并将其反馈至自适应滑模控制器以进行跟踪控制,有效地抑制了机械臂系统的抖振.Xiao等[14 ] 利用一种线性状态观测器实现了机械臂的轨迹跟踪,但是由于线性观测器的固有约束,跟踪效果并不十分理想.扩张状态观测器可拓展应用至估计系统的总扰动,将其用于控制器前馈补偿能够解决控制器过度依赖高增益反馈的问题.将扩张状态观测器与滑模控制相结合,可实现预期的动态扰动跟踪效果,通过滑模控制使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统平衡状态.赵兴强等[15 ] 设计了一种机械臂自适应神经网络滑模控制器,有效地抑制了逼近误差及外部扰动.此外,也有诸多学者针对控制器的参数优化问题开展了研究[16 -20 ] .凤丽洲等[21 ] 提出了一种双重驱动的果蝇优化算法(fruit fly optimization algorithm, FOA),并将其应用于PID(proportional-integral-derivative,比例-积分-微分)控制器的优化,提高了PID控制器的响应速度和稳定性.赵晓军等[22 ] 利用FOA对PID控制器进行了优化,并与利用遗传算法优化的PID控制器进行对比,验证了经FOA优化的PID控制器具有较快的收敛速度.相较于其他群智能算法,FOA实现简单且收敛速度较快,适用于结合扩张状态观测器与自适应滑模控制器的控制系统的优化,不会引入复杂的参数来影响稳定性,具有较高的实用性. ...
An enhanced coupling PD with sliding mode control method for underactuated double-pendulum overhead crane systems
1
2019
... 假设1:由于受到重力的影响,在实际应用中负载总是保持在臂架下方工作,故摆角θ 1 θ 1 ≤ π 2 [23 ] . ...
Motion planning approach for payload swing reduction in tower cranes with double-pendulum effect
1
2020
... 根据文献[24 ],令F = F x - F f x F f x = f 1 t a n h x ˙ / ε x + f 2 x ˙ x ˙ f 1 、f 2 和ε x
基于Hurwicz的概率不确定的灰色随机多准则决策方法
1
2015
... 令a = 3 ω 0 b = 3 ω 0 2 W ˙ 2 = - b W 1 - a W 2 式(12) 的特征方程为:a λ 2 + b λ = 0 λ 为特征根).由Hurwitz定理可知,特征方程的根具有负实部的充要条件为[25 ] :a > 0 b > 0 . ...
基于Hurwicz的概率不确定的灰色随机多准则决策方法
1
2015
... 令a = 3 ω 0 b = 3 ω 0 2 W ˙ 2 = - b W 1 - a W 2 式(12) 的特征方程为:a λ 2 + b λ = 0 λ 为特征根).由Hurwitz定理可知,特征方程的根具有负实部的充要条件为[25 ] :a > 0 b > 0 . ...
DSLC-FOA: improved fruit fly optimization algorithm for application to structural engineering design optimization problems
1
2018
... FOA通过模拟果蝇种群的觅食行为来获得全局最优参数,其计算复杂性低且参数依赖性弱[26 ] ,故适用于参数优化.FOA的寻优原理如图3 所示. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}