| Robotic and Mechanism Design |
|

|
|
|
| Kinematics analysis and simulation of a flexible picking robot arm |
Weitao ZHANG( ),Dongjie ZHAO(),Lu WANG,Xinmian BAO,Baosai HUANG ),Dongjie ZHAO(),Lu WANG,Xinmian BAO,Baosai HUANG |
| School of Mechanical & Automotive Engineering, Liaocheng University, Liaocheng 252059, China |
|
|
|
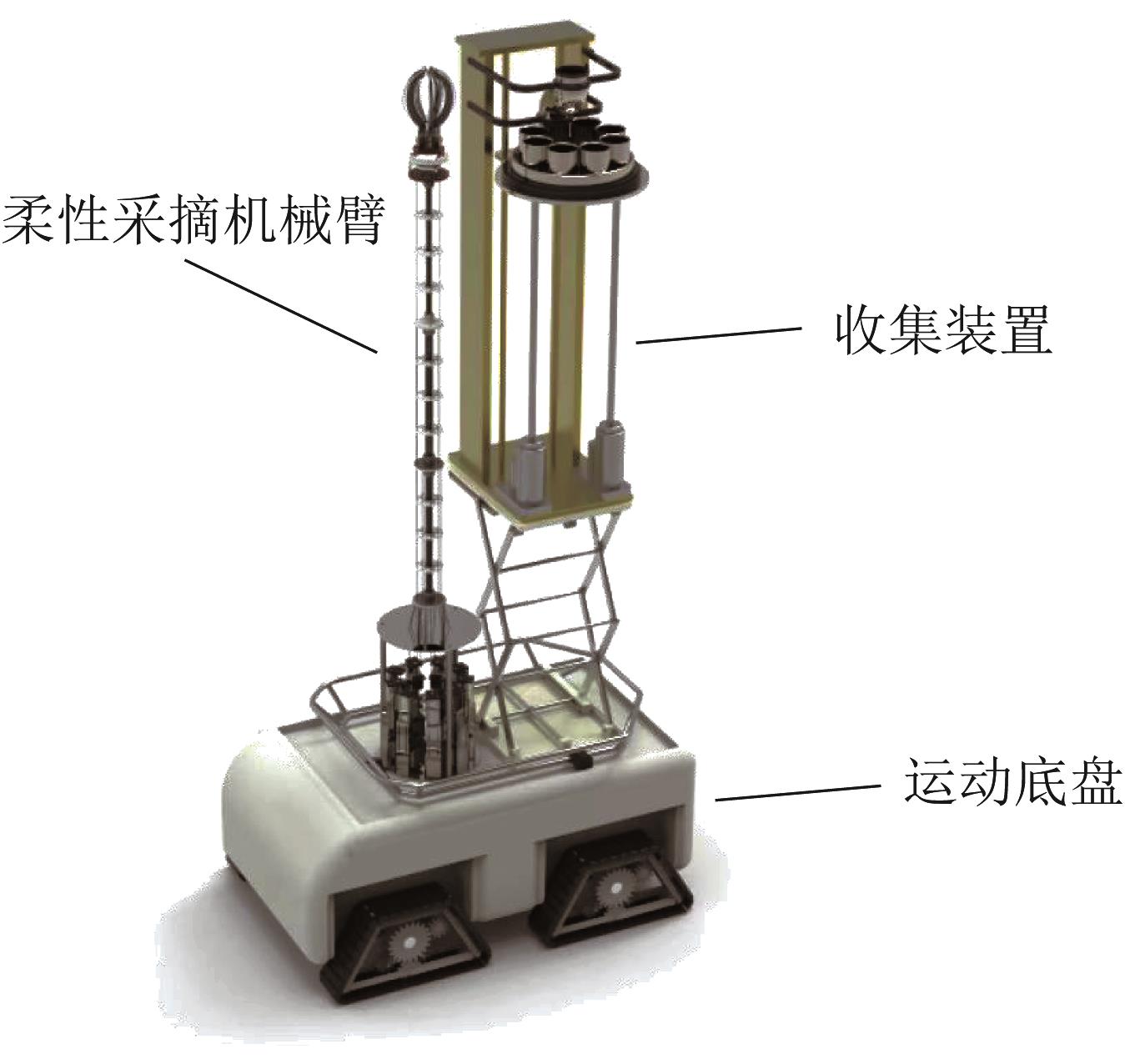
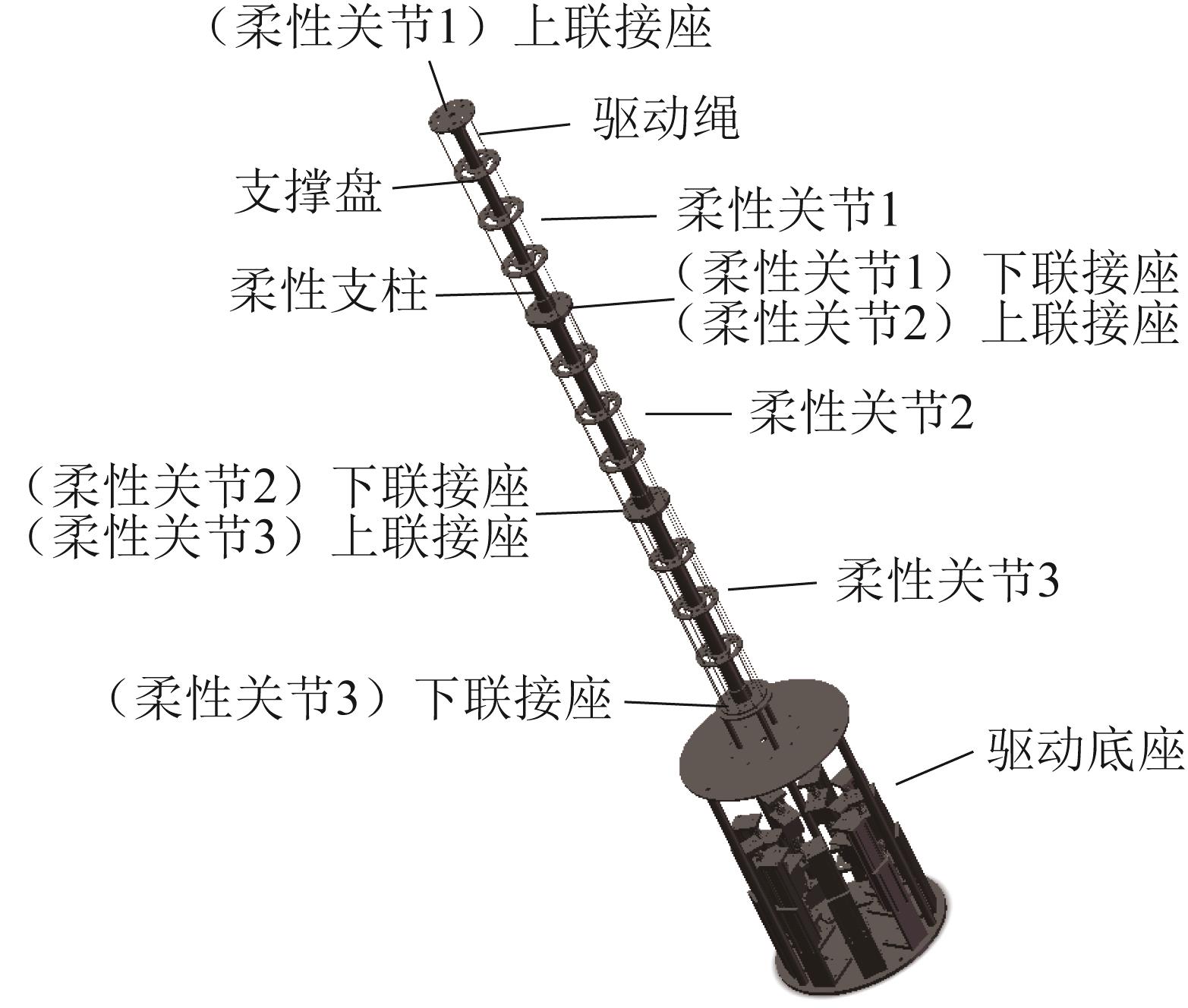
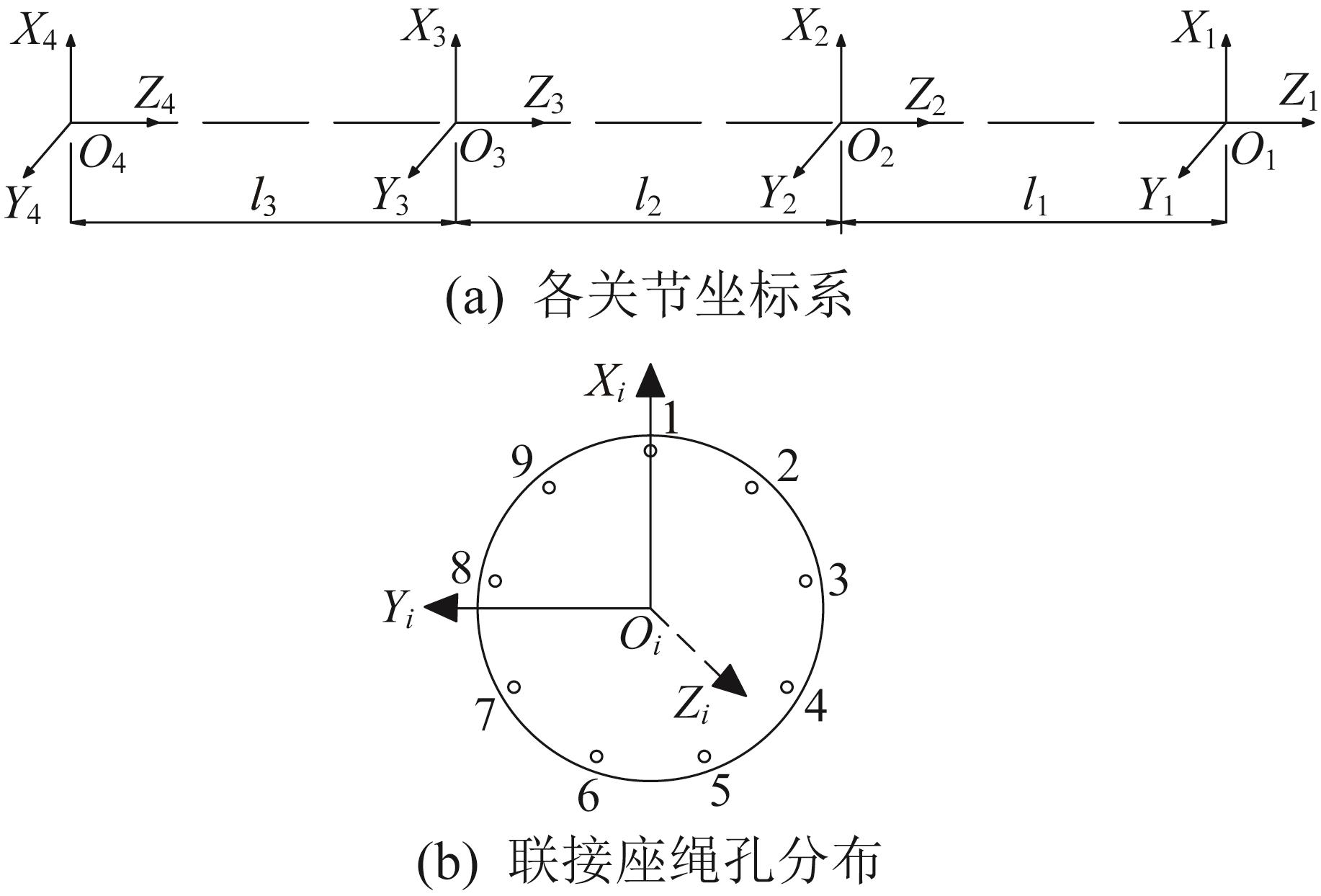
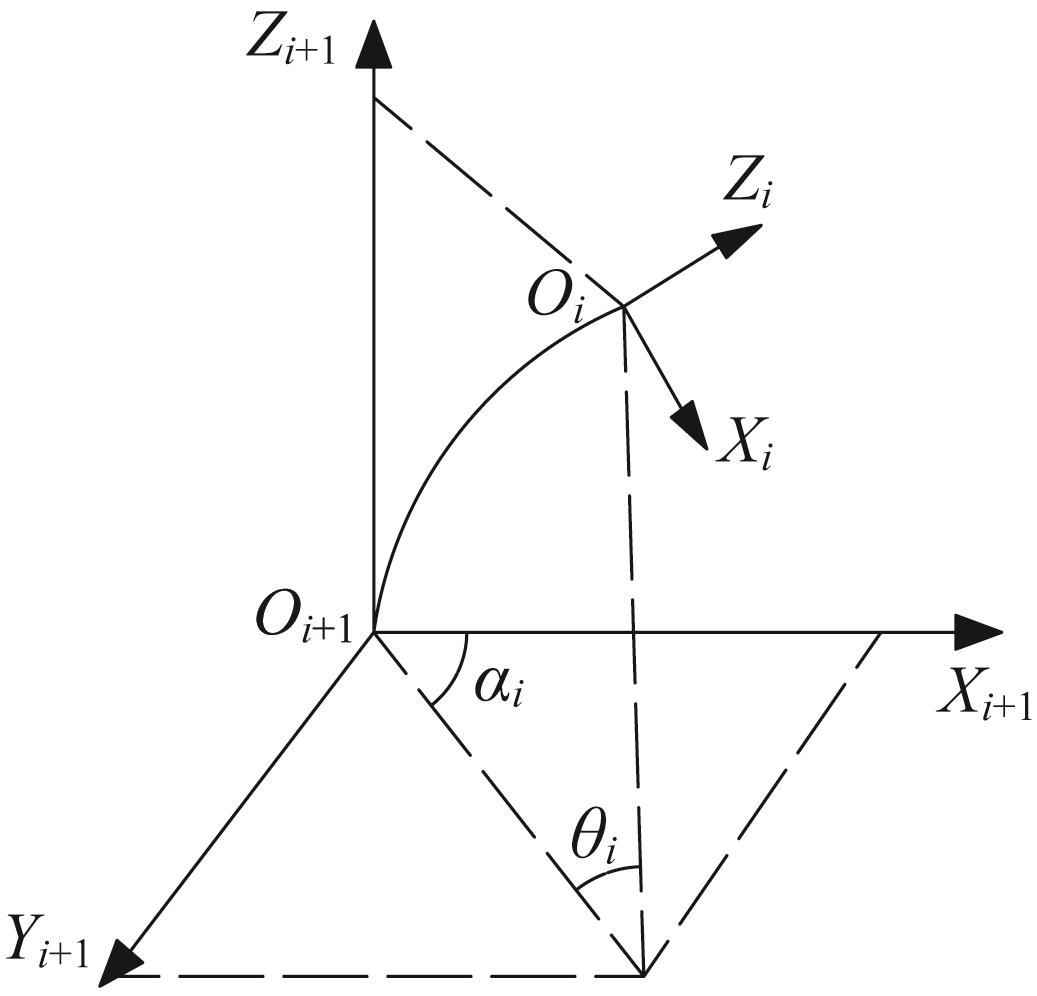
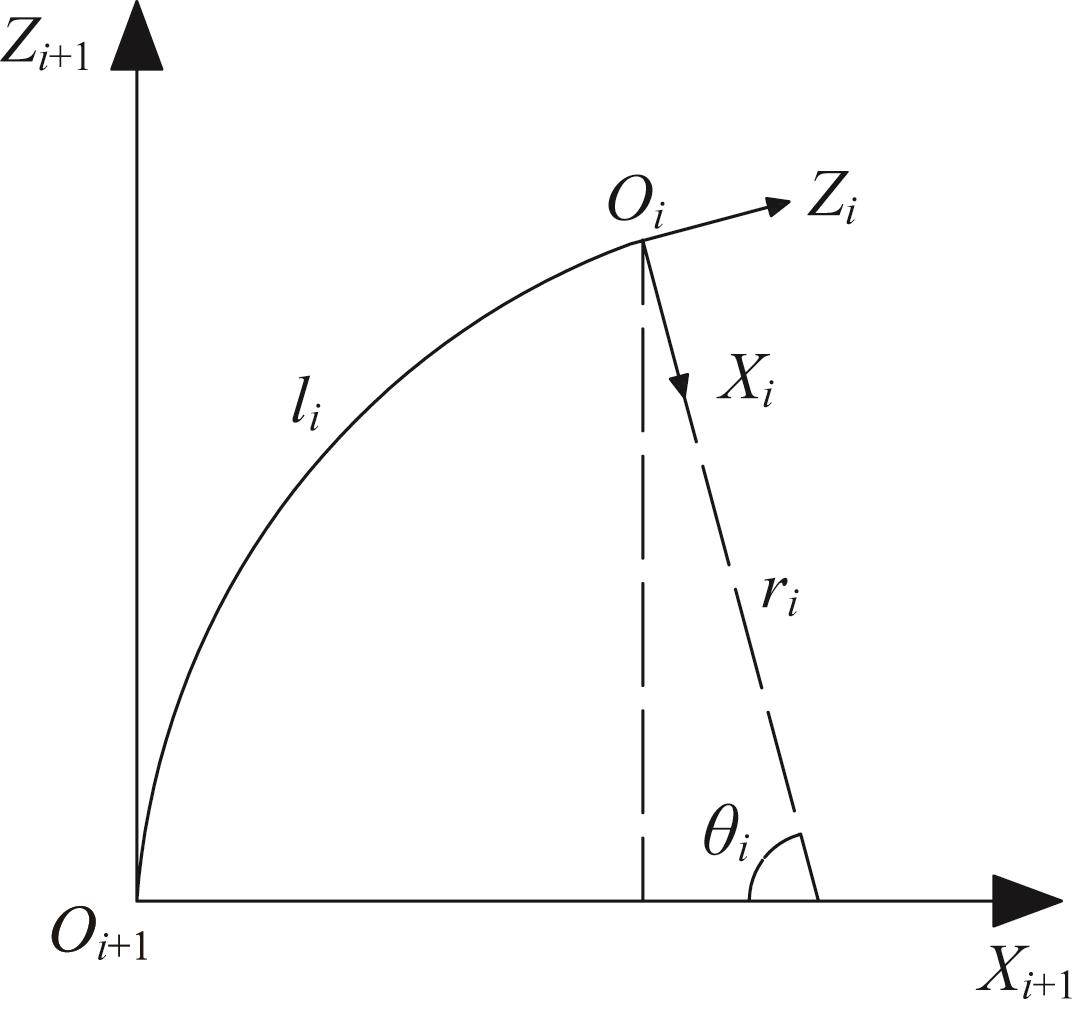
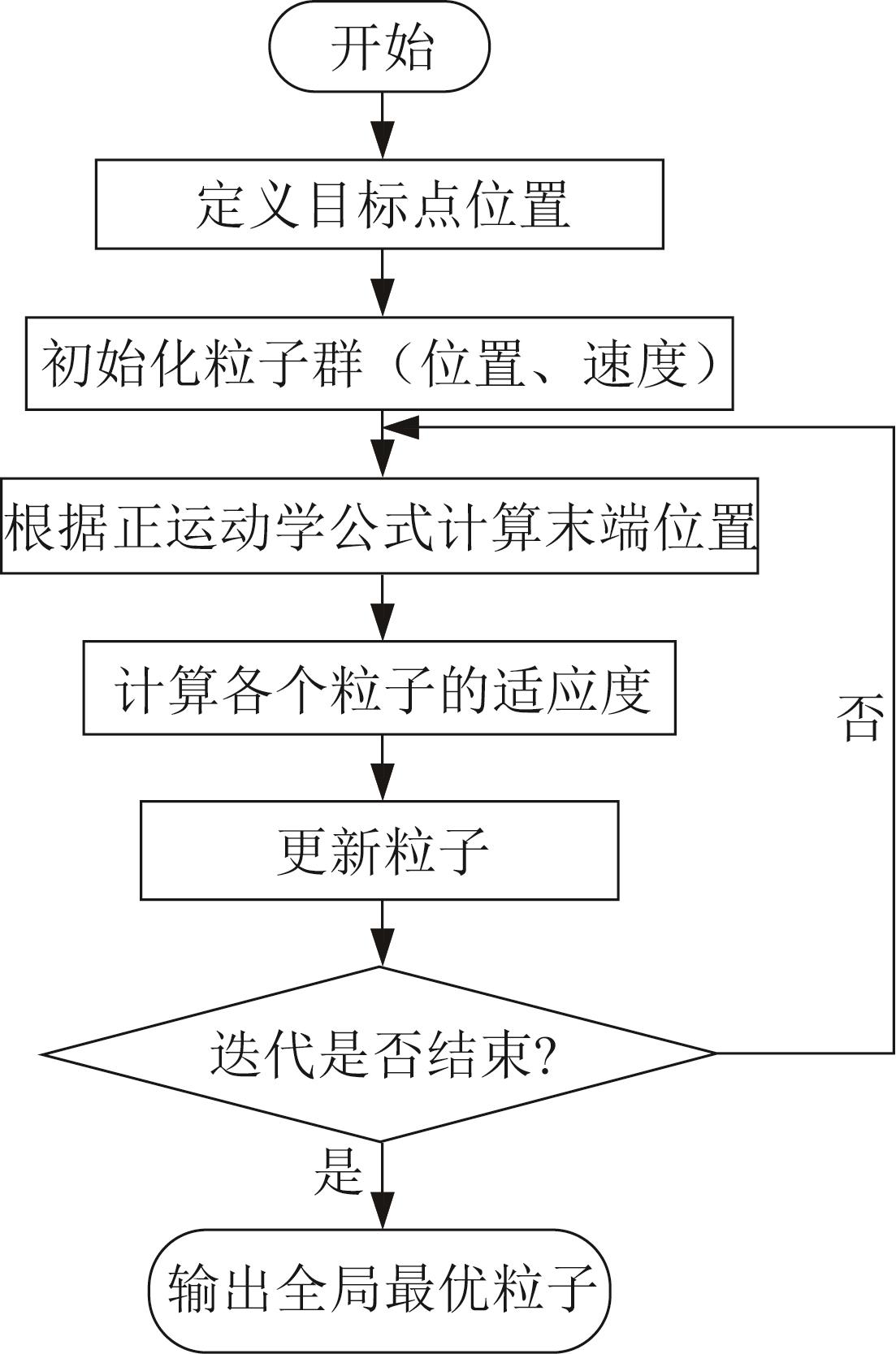
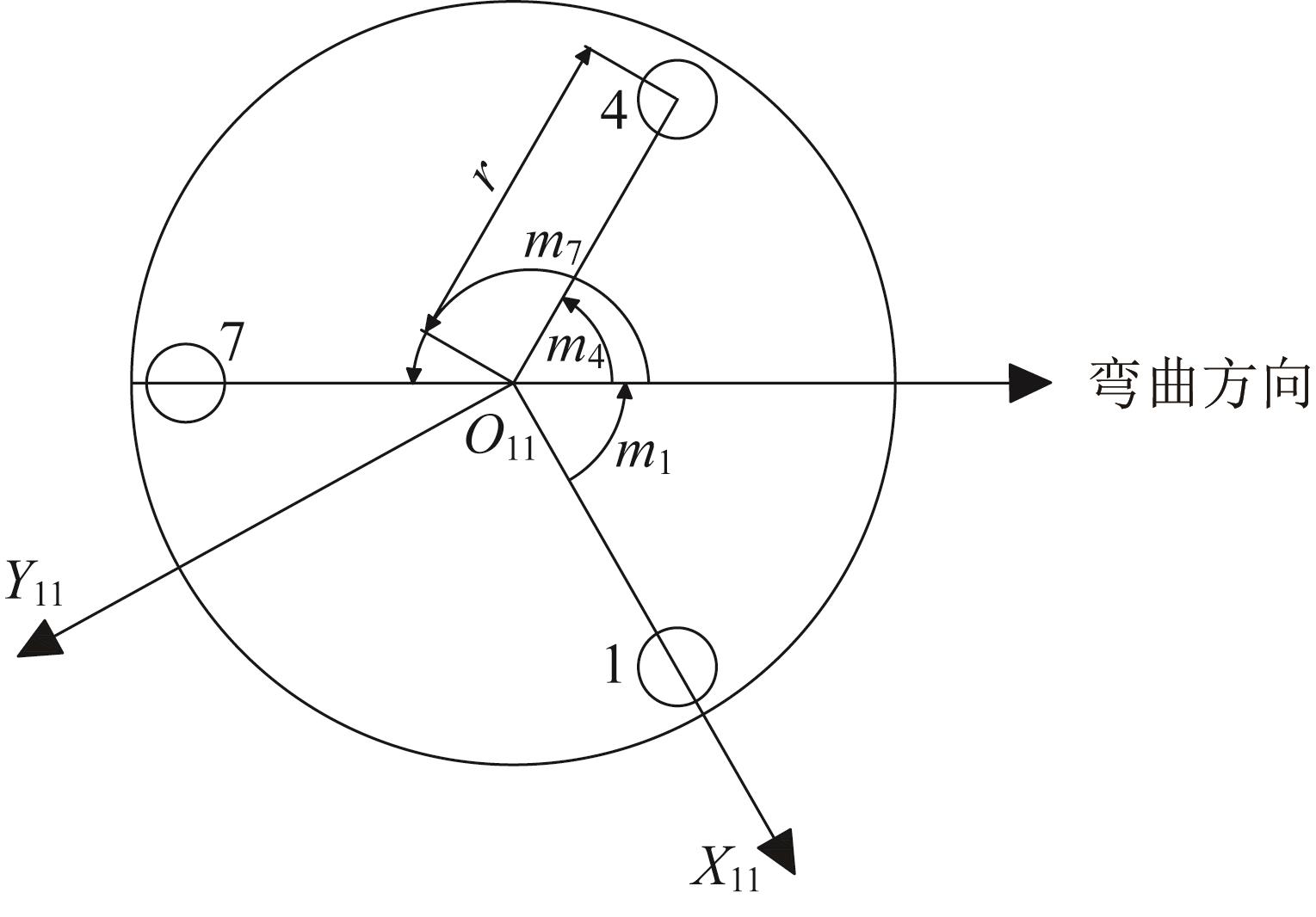
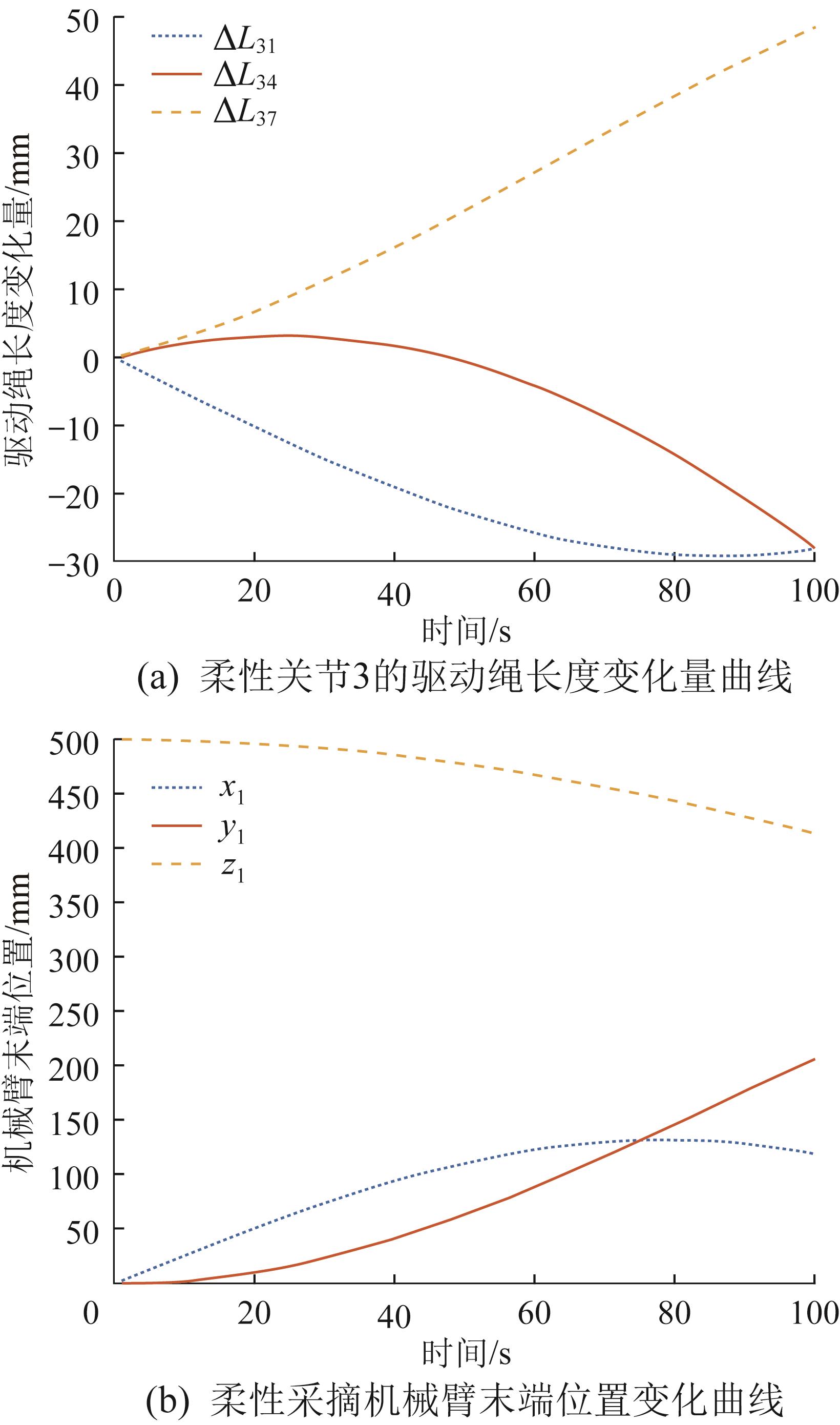
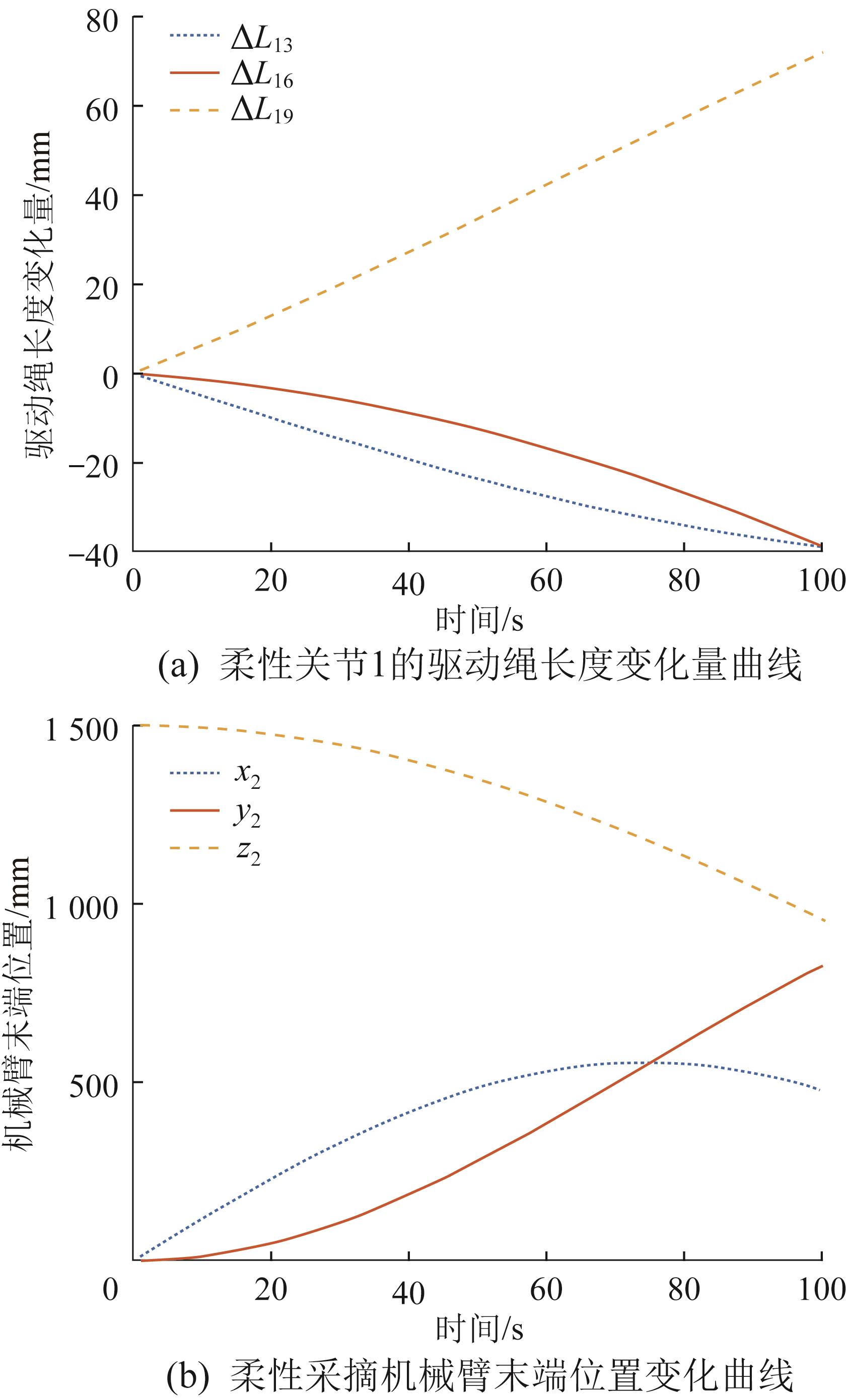
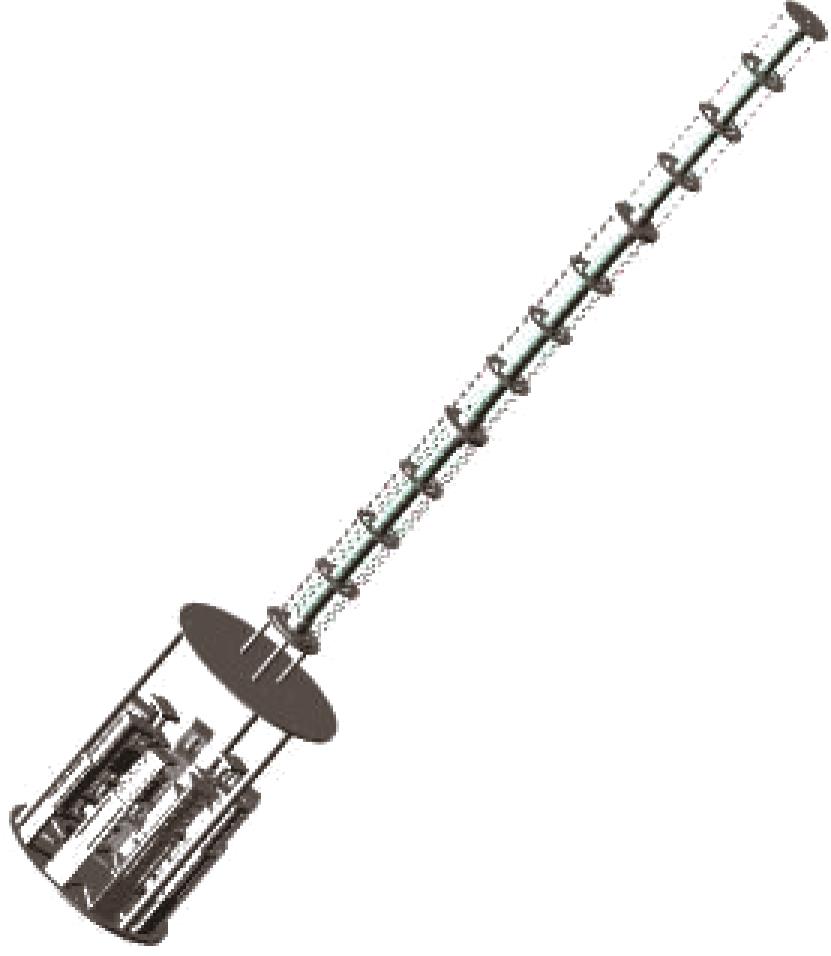
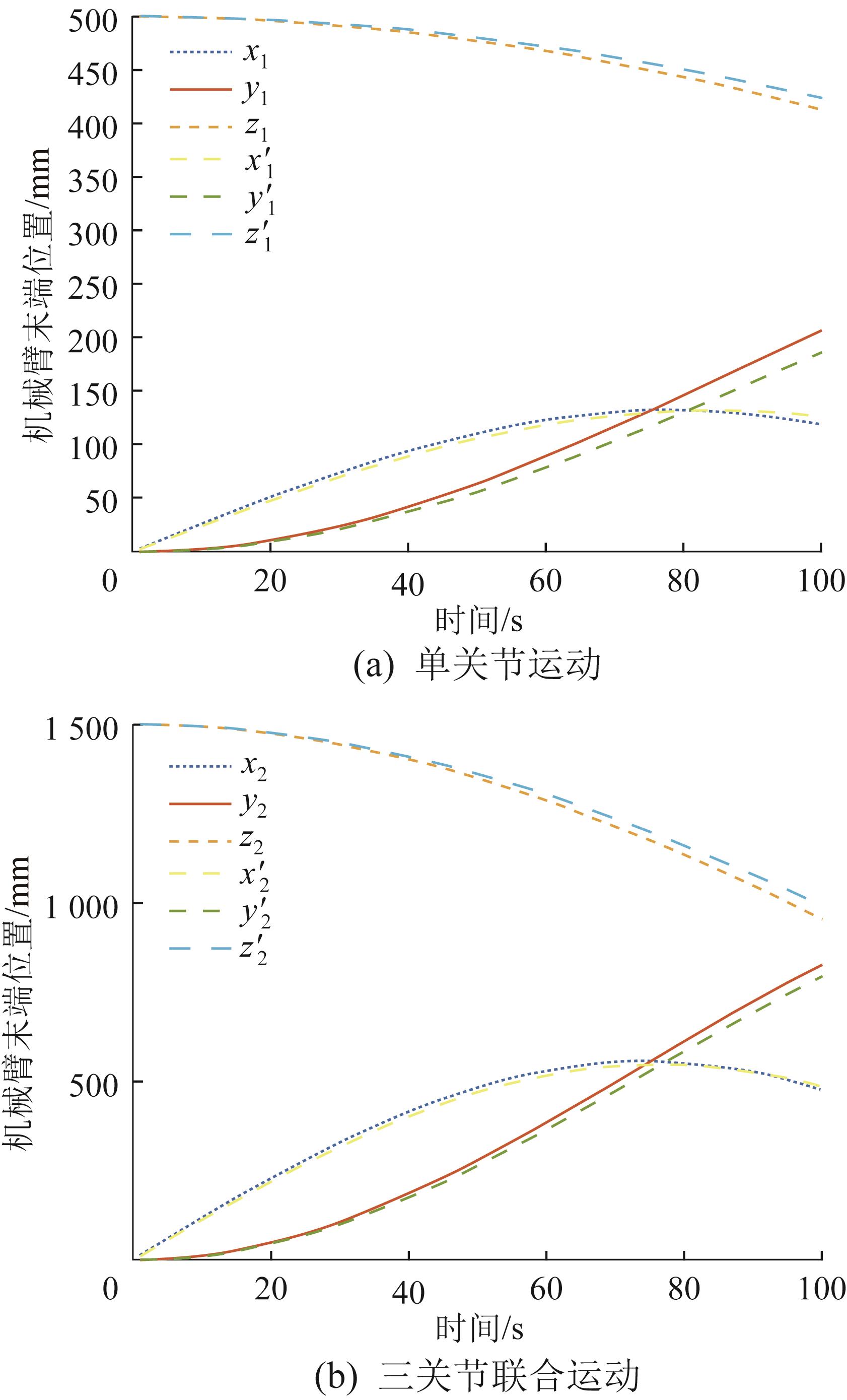
Abstract Aiming at the shortcomings of rigid robot arm in fruit and vegetable picking, a flexible picking robot arm with simple structure and flexible movement was designed. Firstly, the kinematics model of the flexible picking robot arm was established based on the equal arc hypothesis, and the forward and inverse kinematics analysis from joint space to operation space and from driving space to joint space was carried out, as well as the decoupling analysis between the flexible joints. Then, the kinematics models of the flexible picking robot arm were numerically calculated by using MATLAB software, and the virtual prototype model of the flexible picking robot arm was established by ADAMS software. The kinematics simulation was carried out under the same working conditions as the theoretical analysis, and the accuracy of the theoretical analysis results was verified. The simulation results showed that the flexible picking robot arm could move flexibly and coordinatedly. The research results can provide a basis for the subsequent motion control of flexible robot arms.
|
|
Received: 23 March 2023
Published: 26 April 2024
|
|
|
|
Corresponding Authors:
Dongjie ZHAO
E-mail: 1256587669@qq.com;zhaodongjie@lcu.edu.cn
|
一种柔性采摘机械臂的运动学分析与仿真
针对刚性机械臂在果蔬采摘作业中的不足,设计了一种结构简单、运动灵活的柔性采摘机械臂。首先,基于等圆弧假设建立了柔性采摘机械臂的运动学模型,对其进行了从关节空间到操作空间和从驱动空间到关节空间的正、逆运动学分析以及各柔性关节之间的解耦分析。然后,利用MATLAB软件对柔性采摘机械臂的运动学模型进行了数值计算,同时利用ADAMS软件建立柔性采摘机械臂的虚拟样机模型,选用与理论分析相同的工况开展运动学仿真,验证了理论分析结果的准确性。仿真结果表明,该柔性采摘机械臂可实现灵活、协调运动。研究结果可为后续柔性机械臂的运动控制提供依据。
关键词:
柔性采摘机械臂,
运动学模型,
仿真分析
|
|
| [1] |
段洁利,陆华忠,王慰祖,等.水果采收机械的现状与发展[J].广东农业科学,2012,39(16):189-192. doi:10.3969/j.issn.1004-874X.2012.16.059
DUAN J L, LU H Z, WANG W Z, et al. Present situation and development of the fruit harvesting machinery[J]. Guangdong Agricultural Sciences, 2012, 39(16): 189-192.
doi: 10.3969/j.issn.1004-874X.2012.16.059
|
|
|
| [2] |
高国华,郑玉航,马帅,等.黄瓜采摘机械臂运动学分析与样机试验[J].中国农机化学报,2017,38(7):3-9.
GAO G H, ZHENG Y H, MA S, et al. Kinematic analysis and prototype test of cucumber harvesting manipulator[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(7): 3-9.
|
|
|
| [3] |
张文翔,张兵园,贡宇,等.果蔬采摘机器人机械臂研究现状与展望[J].中国农机化学报,2022,43(9):232-237,244.
ZHANG W X, ZHANG B Y, GONG Y, et al. Research status and prospect of fruit and vegetable picking robot manipulator[J]. Journal of Chinese Agricultural Mechanization, 2022, 43(9): 232-237, 244.
|
|
|
| [4] |
王丽丽,范晋伟,赵博,等.果蔬采摘机械臂结构设计与性能测试[J].农业工程,2017,7(2):107-113,23. doi:10.3969/j.issn.2095-1795.2017.02.028
WANG L L, FAN J W, ZHAO B, et al. Structural design and performance test of fruit and vegetable picking manipulator[J]. Agricultural Engineering, 2017, 7(2): 107-113, 23.
doi: 10.3969/j.issn.2095-1795.2017.02.028
|
|
|
| [5] |
赵云伟,耿德旭,刘晓敏,等.气动柔性果蔬采摘机械手运动学分析与实验[J].农业机械学报,2019,50(8):31-42. doi:10.6041/j.issn.1000-1298.2019.08.004
ZHAO Y W, GENG D X, LIU X M, et al. Kinematics analysis and experiment of pneumatic flexible fruit and vegetable picking manipulator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(8): 31-42.
doi: 10.6041/j.issn.1000-1298.2019.08.004
|
|
|
| [6] |
WEBSTER R J, ROMANO J M, COWAN N J. Mechanics of precurved-tube continuum robots[J]. IEEE Transactions on Robotics, 2008, 25(1): 67-78.
|
|
|
| [7] |
MCMAHAN W, JONES B A, WALKER I D. Design and implementation of a multi-section continuum robot: Air-Octor[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, Aug. 2-6, 2005.
|
|
|
| [8] |
MCMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the octarm continuum manipulator[C]// Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, May 15-19, 2006.
|
|
|
| [9] |
ZHANG L F, XU M, YANG H. Research on soft manipulator actuated by shape memory alloy (SMA) springs[C]//2017 IEEE International Conference on Real-time Computing and Robotics (RCAR). Okinawa, Jul. 14-18, 2017.
|
|
|
| [10] |
SIMAAN N. Snake-like units using flexible backbones and actuation redundancy for enhanced miniaturization[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Apr. 18-22, 2005.
|
|
|
| [11] |
胡海燕,王鹏飞,孙立宁,等.线驱动连续型机器人的运动学分析与仿真[J].机械工程学报,2010,46(19):1-8. doi:10.3901/jme.2010.19.001
HU H Y, WANG P F, SUN L N, et al. Kinematic analysis and simulation for cable-driven continuum robot[J]. Journal of Mechanical Engineering, 2010, 46(19): 1-8.
doi: 10.3901/jme.2010.19.001
|
|
|
| [12] |
郭伟,肖滔,胡海燕,等.一种连续型肠道机器人的通过性研究与仿真[J].机械与电子,2010,28(7):63-67. doi:10.3969/j.issn.1001-2257.2010.07.019
GUO W, XIAO T, HU H Y, et al. Trafficability analysis and simulation for a continuum endoscope robot[J]. Machinery and Electronics, 2010, 28(7): 63-67.
doi: 10.3969/j.issn.1001-2257.2010.07.019
|
|
|
| [13] |
胡海燕,李伟达,李娟,等.结肠镜机器人结构设计与通过性研究[J].哈尔滨工程大学学报,2013,34(2):233-239. doi:10.3969/j.issn.1006-7043.201204049
HU H Y, LI W D, LI J, et al. Structure design and trafficability of colonoscopic robot[J]. Journal of Harbin Engineering University, 2013, 34(2): 233-239.
doi: 10.3969/j.issn.1006-7043.201204049
|
|
|
| [14] |
薛忠健.基于D-H法的锻造机器人运动学分析[J].机电工程技术,2020,49(11):40-42,128. doi:10.3969/j.issn.1009-9492.2020.11.010
XUE Z J. Kinematic analysis of forging robot based on D-H method[J]. Mechanical & Electrical Engineering Technology, 2020, 49(11): 40-42, 128.
doi: 10.3969/j.issn.1009-9492.2020.11.010
|
|
|
| [15] |
刘守法,王晋鹏,李勇,等.基于D-H法的5-DOF串并联机床运动学分析[J].制造技术与机床,2018(11):110-115.
LIU S F, WANG J P, LI Y, et al. Kinematics analysis of 5-DOF series-parallel machine tool based on D-H method[J]. Manufacturing Technology & Machine Tool, 2018(11): 110-115.
|
|
|
| [16] |
方方闻怡,梁医,冯虎田.基于D-H法的轨道摇臂摄影机器人运动学分析[J].机械设计与制造工程,2021,50(8):15-20. doi:10.3969/j.issn.2095-509X.2021.08.003
FANG F W Y, LIANG Y, FENG H T. Kinematics analysis of orbital rocker robot based on D-H method[J]. Machine Design and Manufacturing Engineering, 2021, 50(8): 15-20.
doi: 10.3969/j.issn.2095-509X.2021.08.003
|
|
|
| [17] |
白晓慧,何小娟,孙超利,等.基于分层学习的改进PSO算法求解复杂优化问题[J].太原科技大学学报,2021,42(3):169-174. doi:10.3969/j.issn.1673-2057.2021.03.001
BAI X H, HE X J, SUN C L, et al. Particle swarm optimization algorithm based on hierarchical learning for complex optimization problem[J]. Journal of Taiyuan University of Science and Technology, 2021, 42(3): 169-174.
doi: 10.3969/j.issn.1673-2057.2021.03.001
|
|
|
| [18] |
薛永生,吴立尧.基于模拟退火的改进粒子群算法研究及应用[J].海军航空工程学院学报,2018,33(2):248-252. doi:10.7682/j.issn.1673-1522.2018.02.012
XUE Y S, WU L Y. Research and application of improved PSO algorithm based on simulated annealing[J]. Journal of Naval Aeronautical and Astronautical University, 2018, 33(2): 248-252.
doi: 10.7682/j.issn.1673-1522.2018.02.012
|
|
|
| [19] |
周驰,高海兵,高亮,等.粒子群优化算法[J].计算机应用研究,2003,20(12):7-11. doi:10.3969/j.issn.1001-3695.2003.12.003
ZHOU C, GAO H B, GAO L, et al. Particle swarm optimization (PSO) algorithm[J]. Application Research of Computers, 2003, 20(12): 7-11.
doi: 10.3969/j.issn.1001-3695.2003.12.003
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|