| Optimization Design |
|


|
|
|
| Lightweight design of Stewart type six-axis force sensor |
Chen WANG1( ),Bo GAO2(),Xu YANG3 ),Bo GAO2(),Xu YANG3 |
1.Department of Aeronautical Engineering, Shaanxi Polytechnic Institute, Xianyang 712000, China
2.Shaanxi Electric Appliance Research Institute, China Aerospace Science and Technology Corporation, Xi'an 710065, China
3.Beijing Institute of Spacecraft System Engineering, Beijing 100094, China |
|
|
|
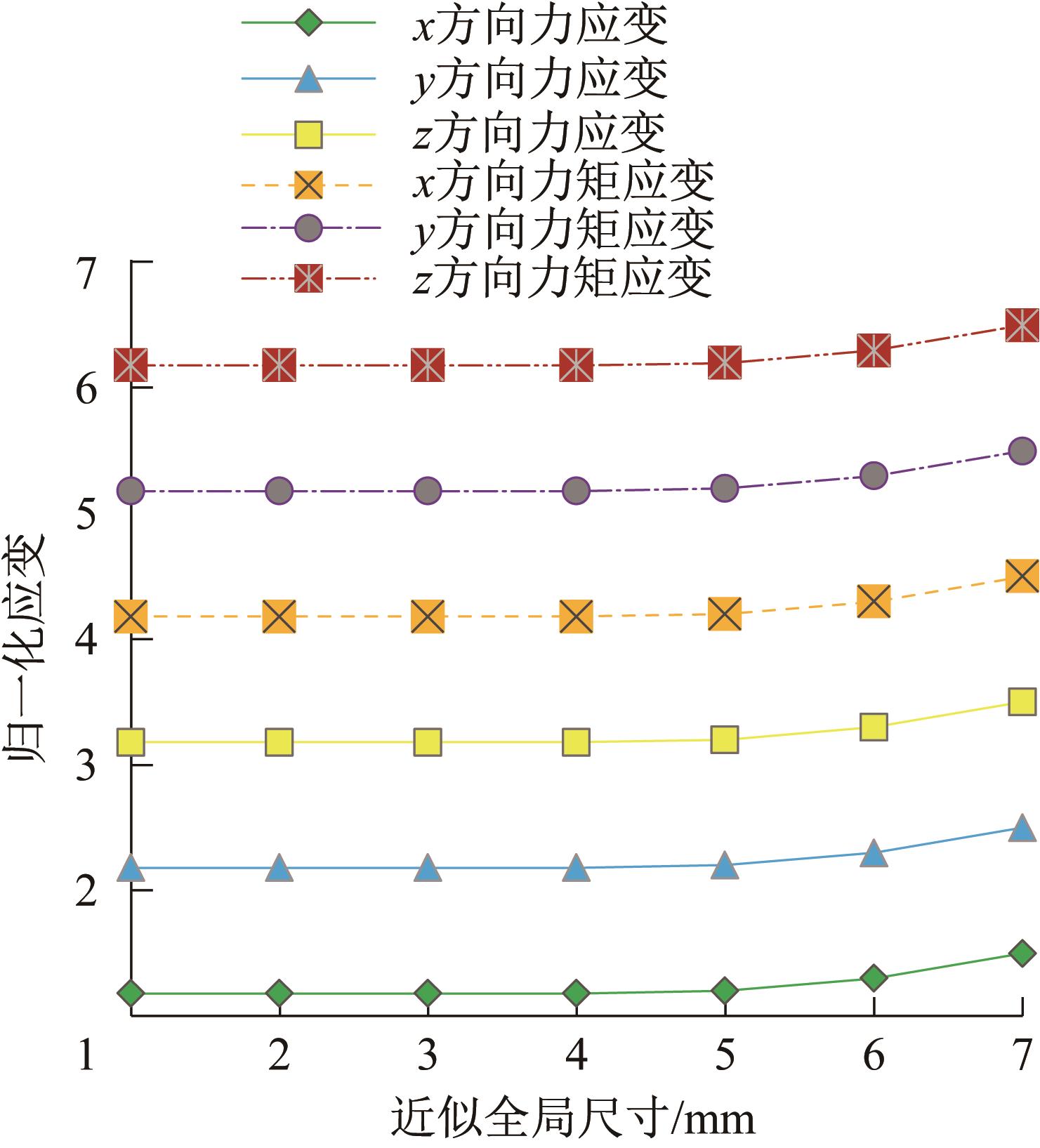
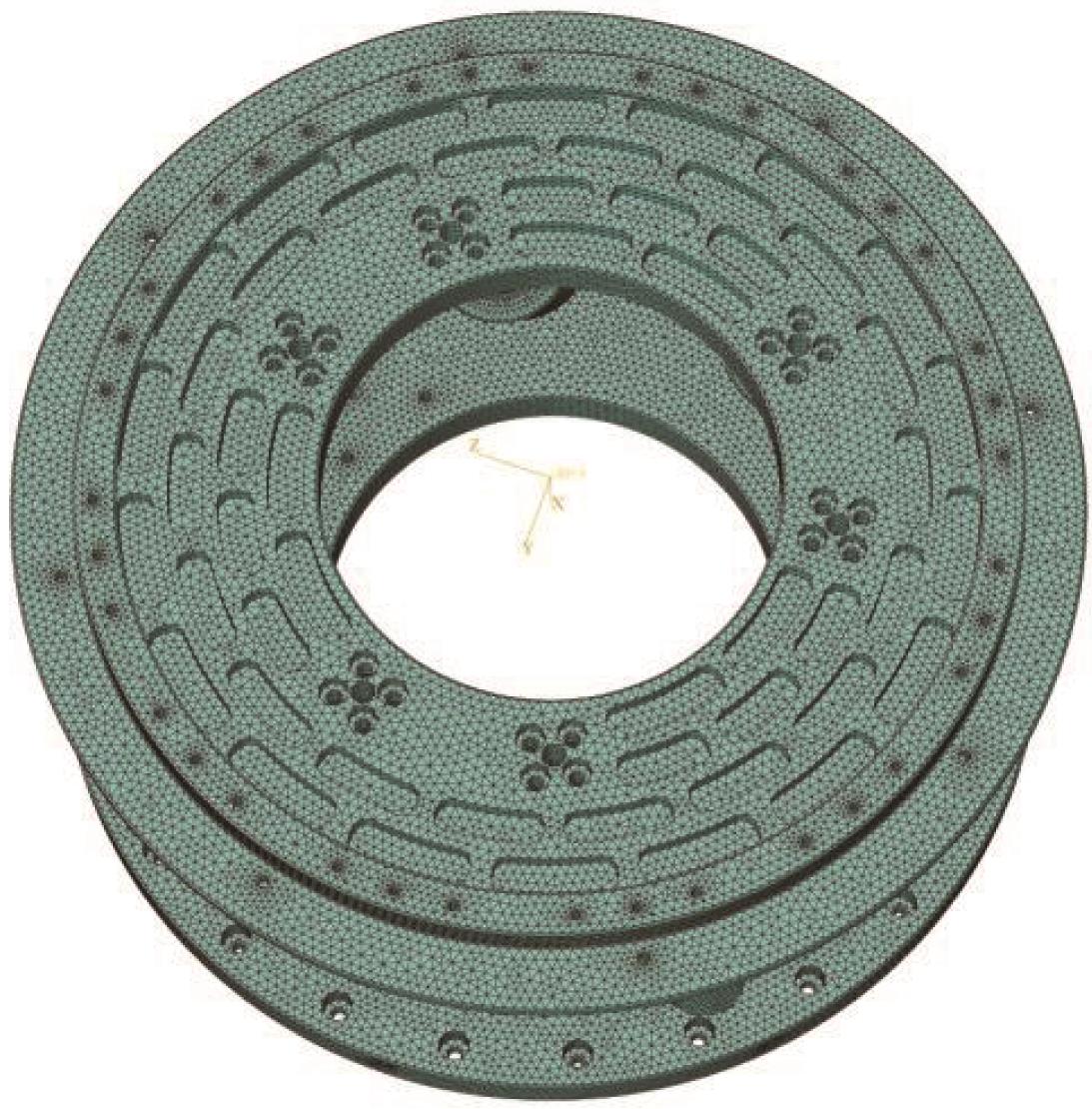
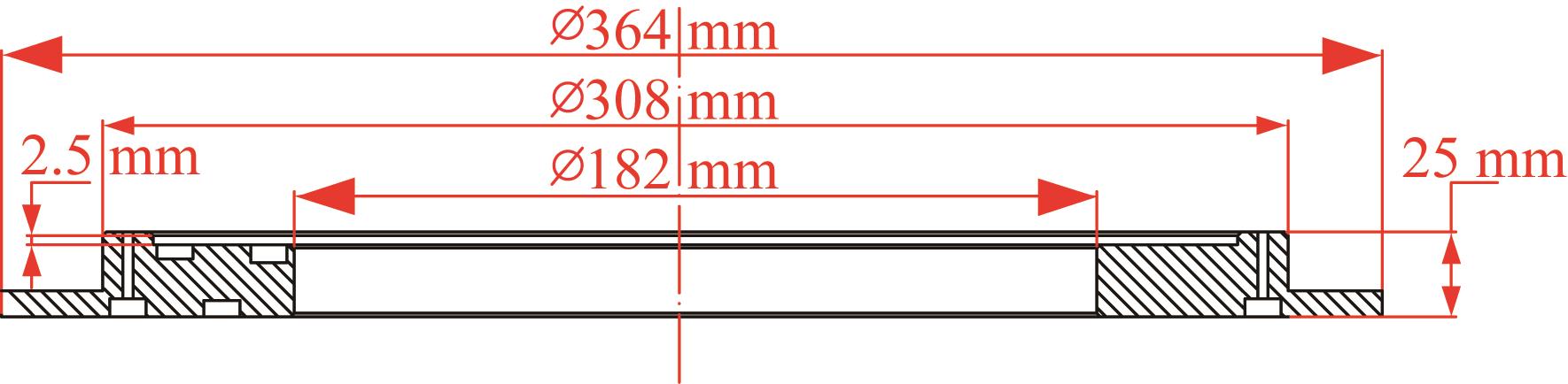
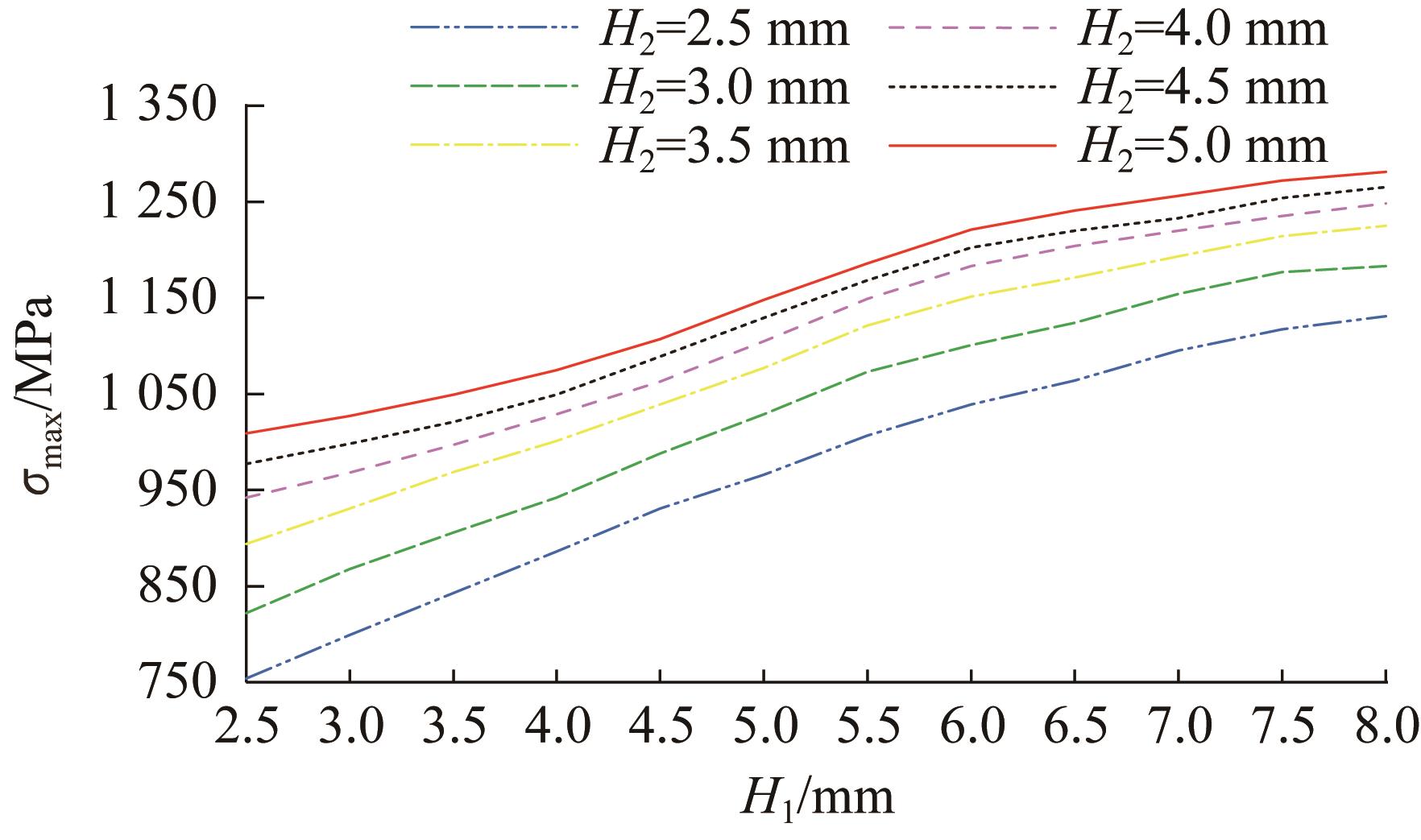
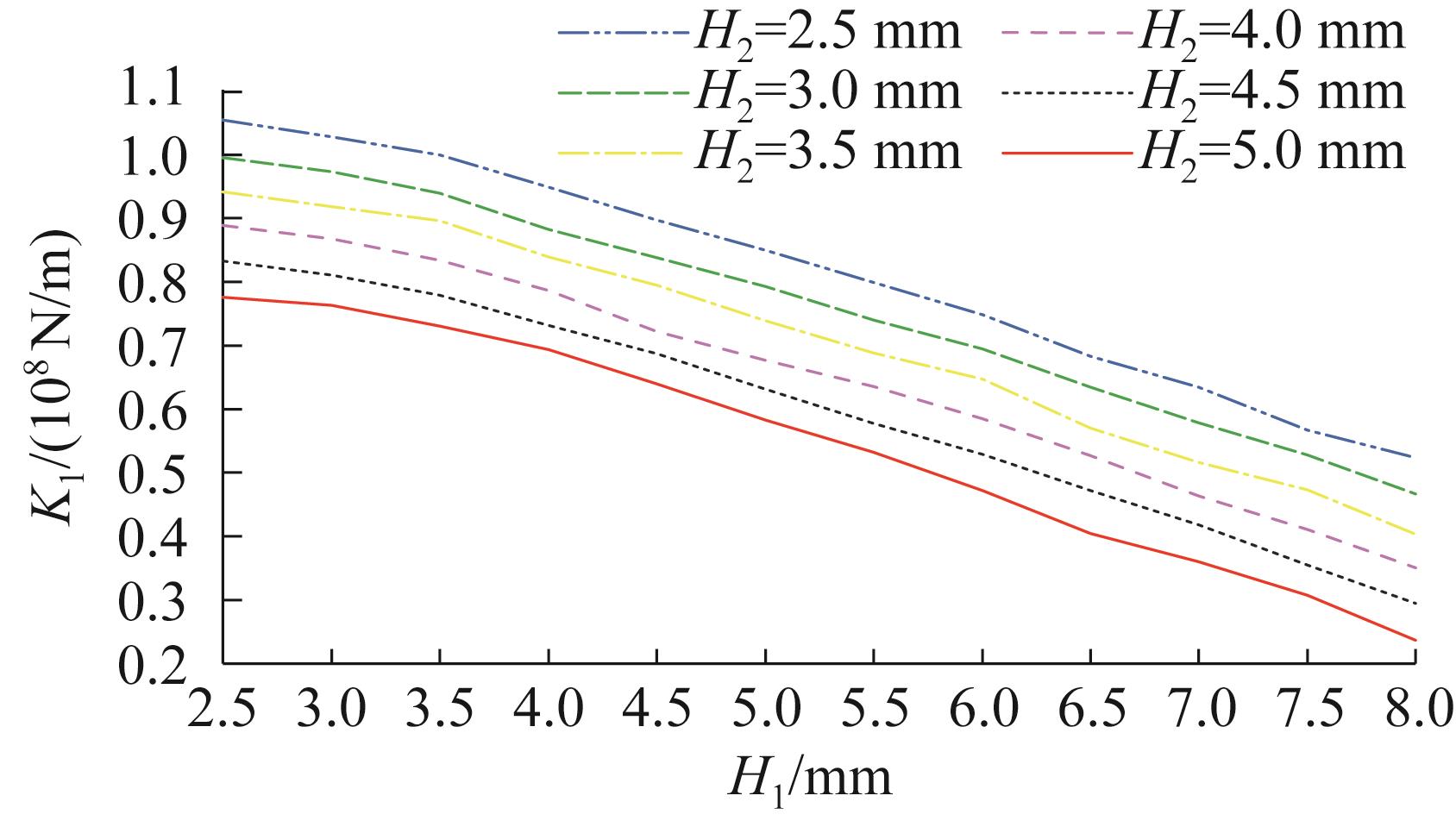
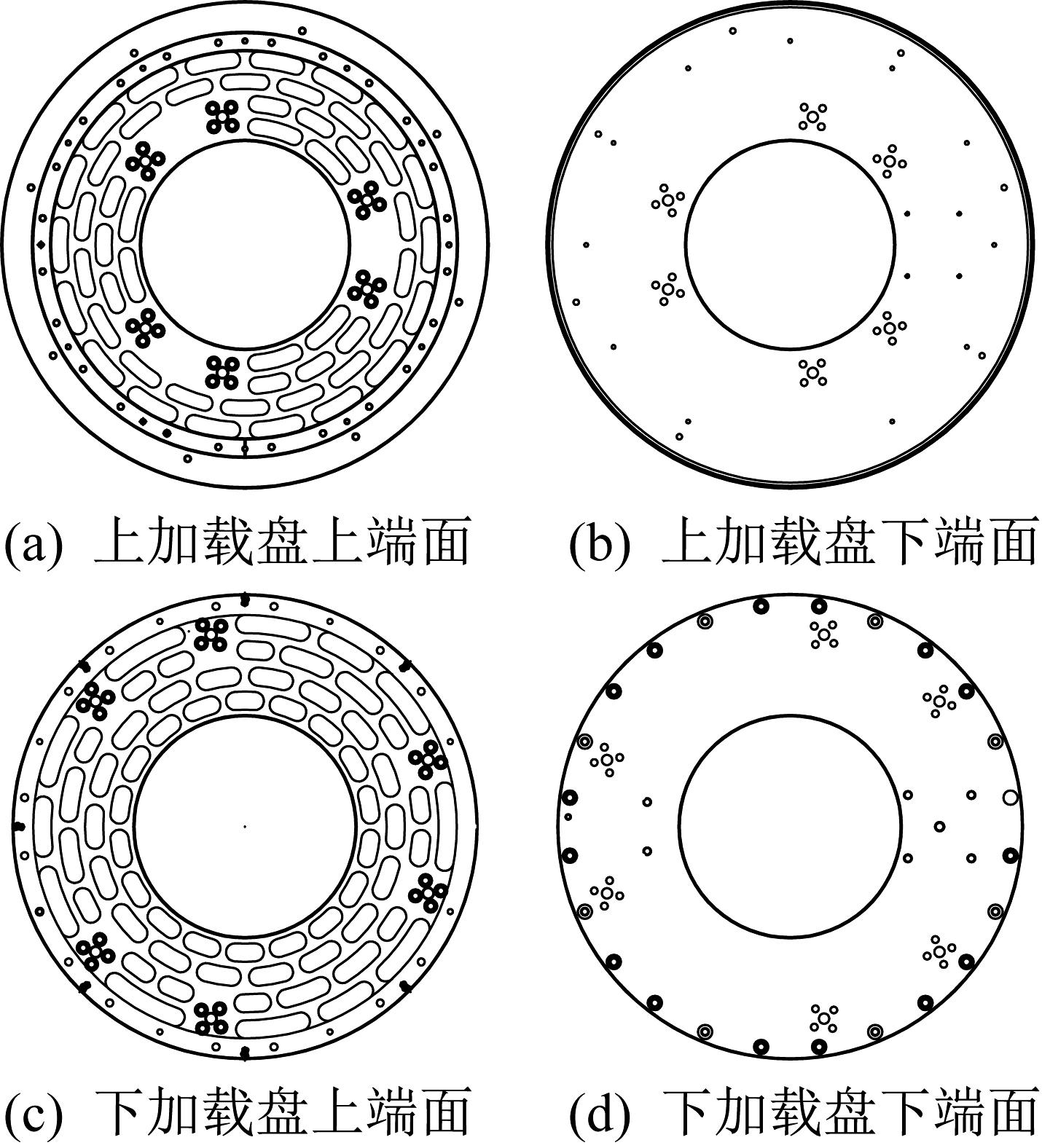
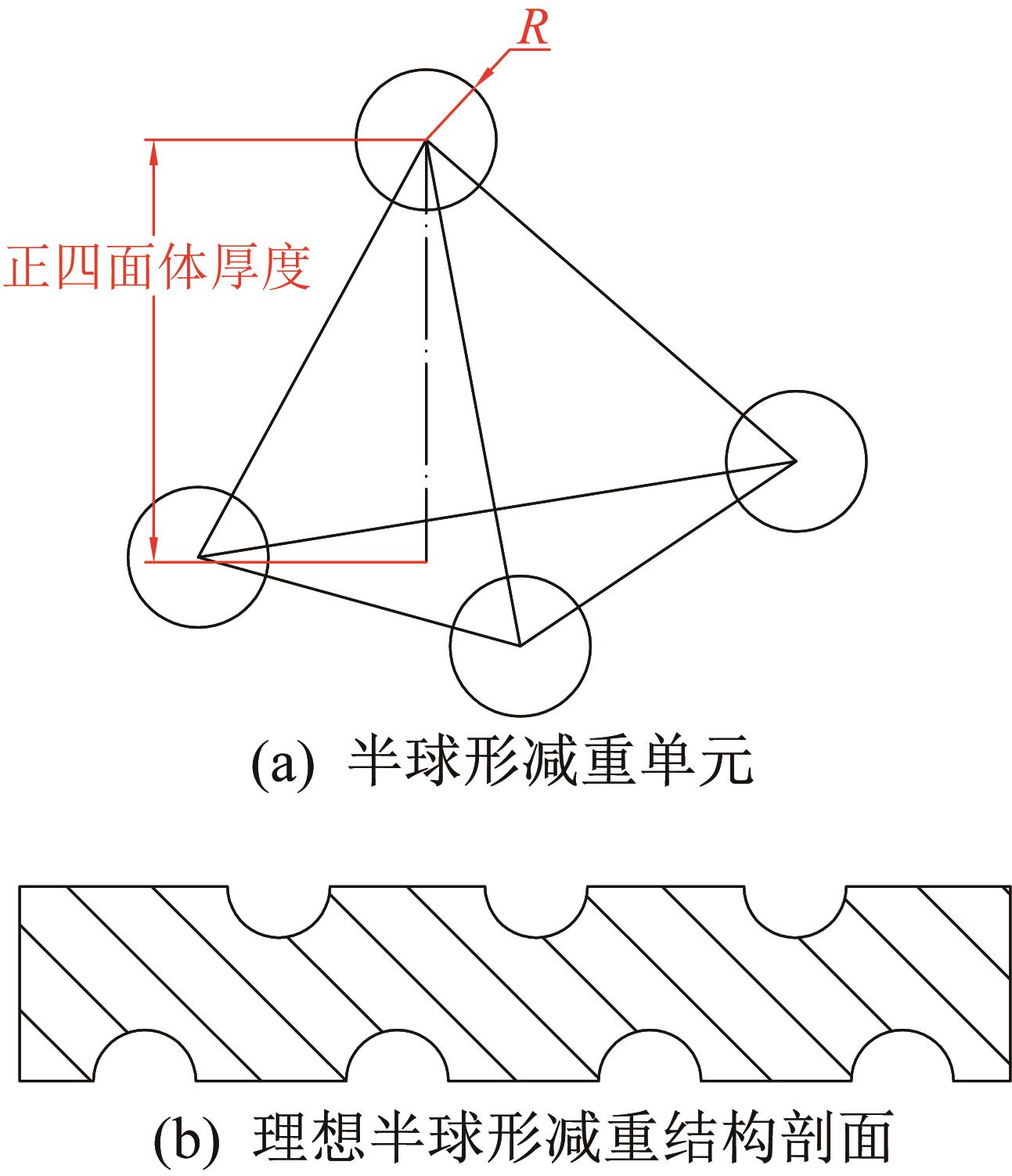
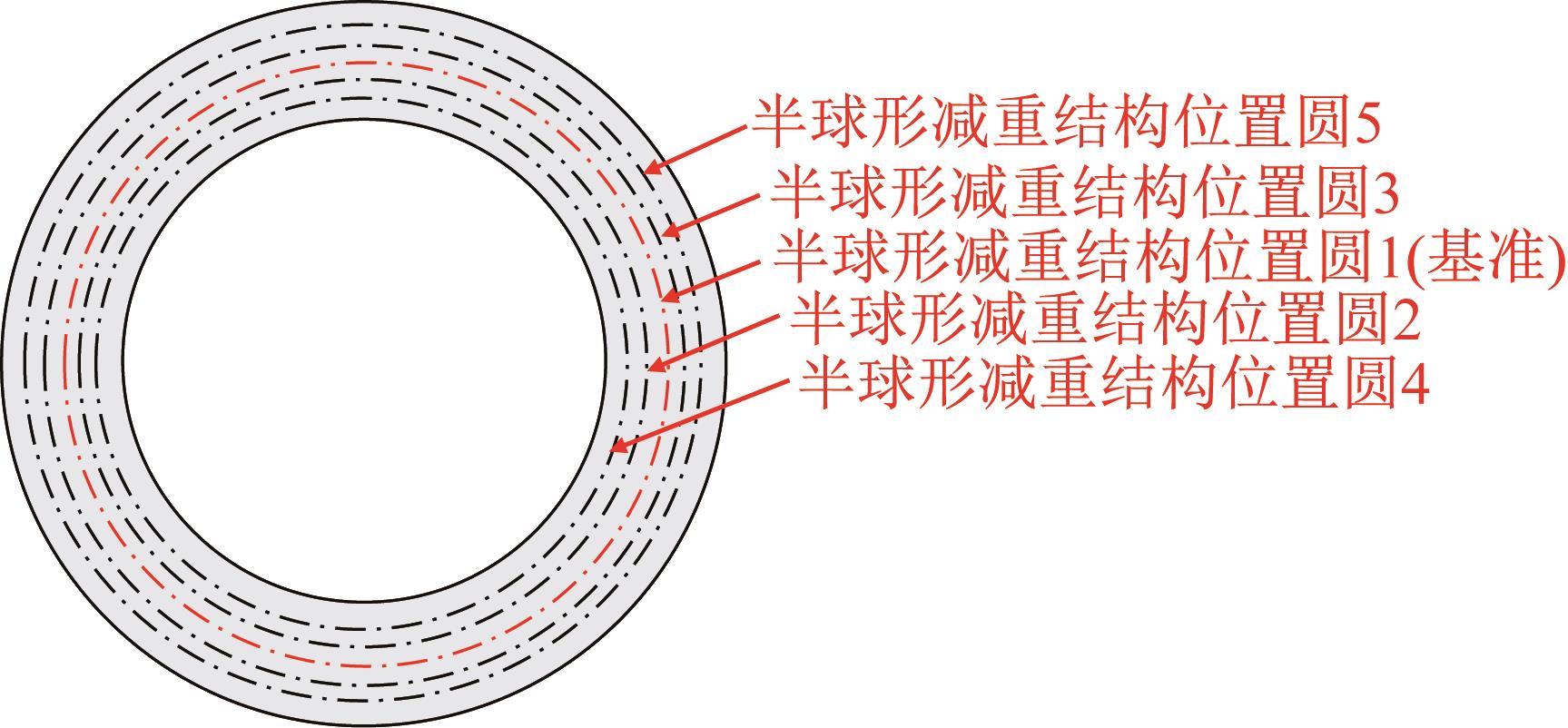
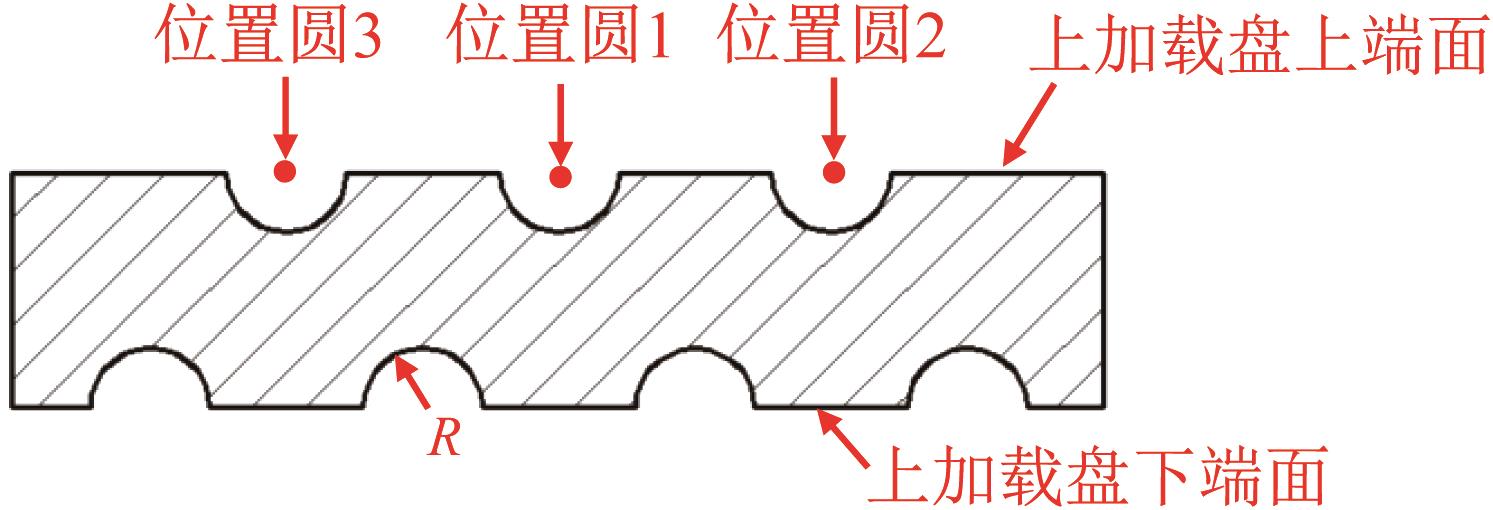
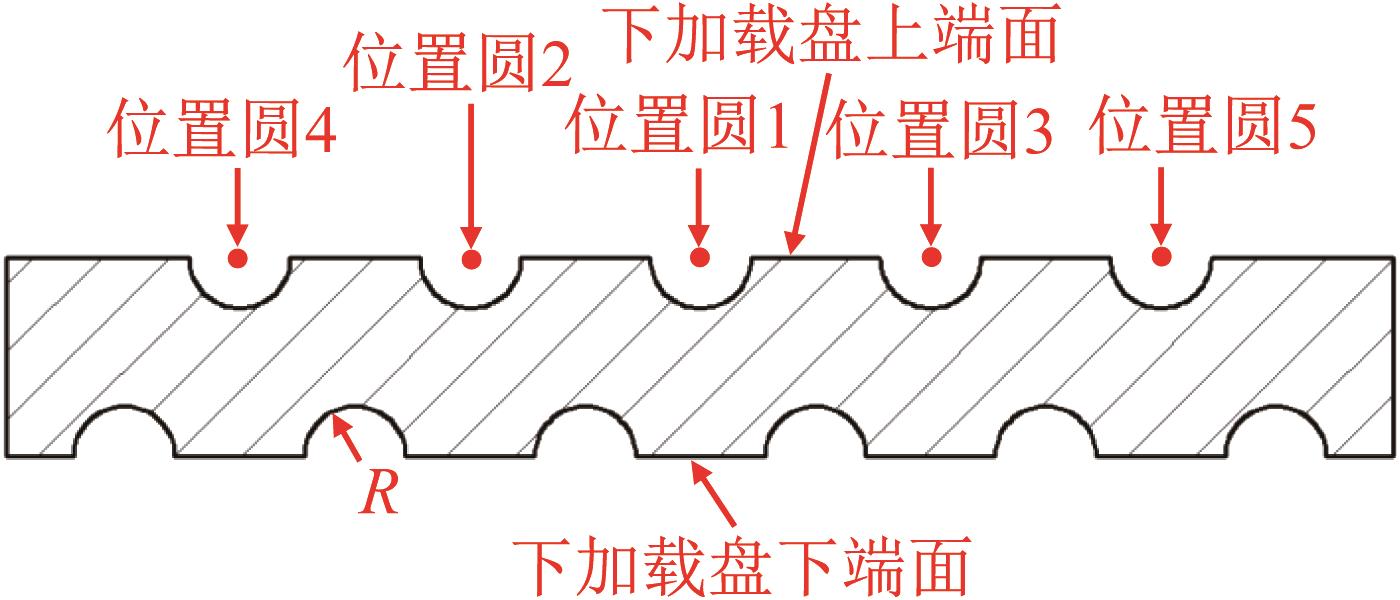
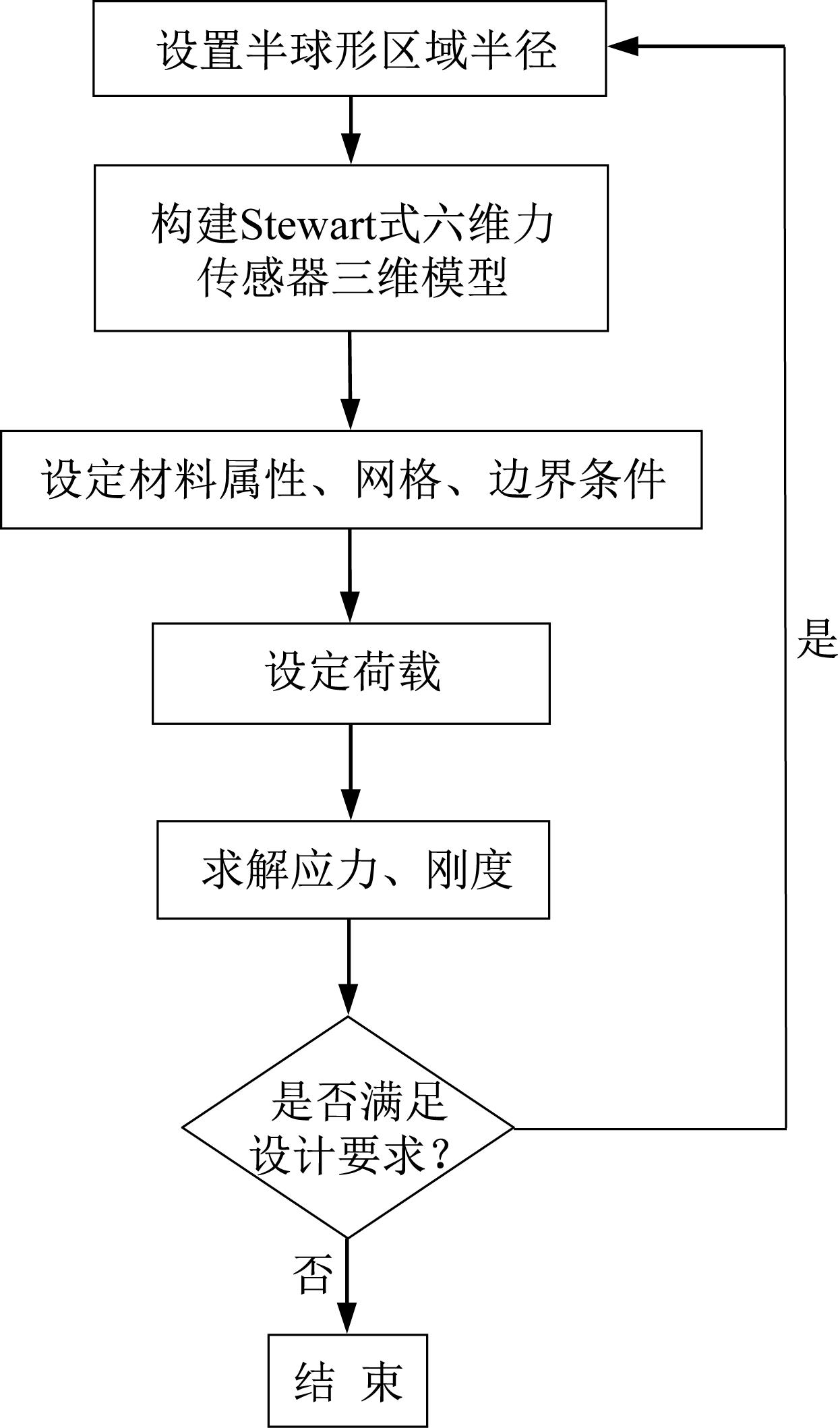
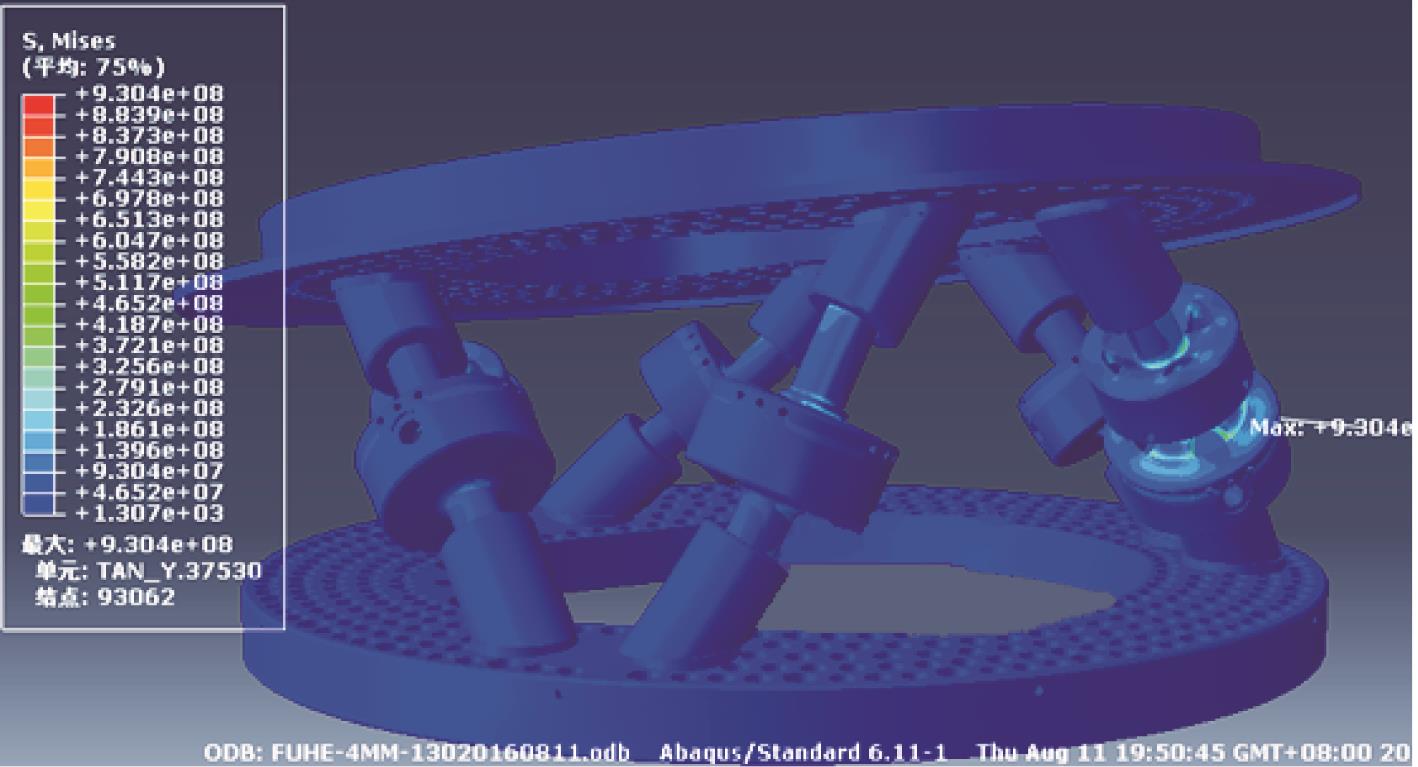
Abstract Spatial composite force measurement is one of the important development directions of spatial sensing technology. As a main spatial composite force measuring device, the six-axis force sensor is widely used in rocket engine thrust test, spacecraft docking and other fields. At present, lightweight has become one of the main research directions of six-axis force sensors. However, due to the large number of design indicators and mutual constraints among various indicators, the method of theoretical derivation, numerical simulation and experimental verification was adopted in the research. Firstly, the force mapping model of Stewart type six-axis force sensor under ideal conditions was established based on the spiral theory, and the structural parameters when the theoretical isotropy was optimal were determined by solving the comprehensive performance objective function. Then, the simulation model of Stewart type six-axis force sensor was built by using the ABAQUS finite element analysis software, and the mass, stiffness, strength and sensitivity of its initial prototype were analyzed in detail. On this basis, the influence of the main structural parameters of upper and lower loading plates on the mass, stiffness and strength of sensor was analyzed, the structural parameters of upper and lower loading plates were optimized, and a hemispherical weight reduction structure with regular tetrahedron characteristics was designed, which realized the lightweight design of sensor. Finally, the performance of optimized Stewart type six-axis force sensor was simulated and verified by experiments. The results showed that multi-objective parameter optimization combined with numerical simulation and experimental verification could effectively improve design efficiency and reduce design cost; the designed weight reduction structure could effectively improve the mass distribution of Stewart type six-axis force sensor and improve its mass utilization. After optimization, the mass of the sensor was reduced by 17.65% and its comprehensive performance was excellent. The research results can provide reference for lightweight design and comprehensive performance optimization of six-axis force sensors.
|
|
Received: 19 November 2021
Published: 05 September 2022
|
|
|
|
Corresponding Authors:
Bo GAO
E-mail: 1064336813@qq.com;gaobo8868@163.com
|
Stewart式六维力传感器轻量化设计
空间复合力测量是空间感知技术的重要发展方向之一。六维力传感器作为主要的空间复合力测量装置,被广泛应用于火箭发动机推力测试、航天器对接等领域。目前,轻量化已成为六维力传感器的主要研究方向之一,但由于其设计指标多且各项指标间存在相互制约,故采用理论推导、数值仿真及实验验证相结合的方法进行研究。首先,利用螺旋理论建立Stewart式六维力传感器在理想条件下的力映射模型,通过求解综合性能目标函数来确定其各向同性度理论最优时的结构参数。然后,利用ABAQUS有限元分析软件构建Stewart式六维力传感器仿真模型,并对其初始样机的质量、刚度、强度和灵敏度进行了详细分析;在此基础上,分析了上、下加载盘主要结构参数对传感器质量、刚度和强度的影响,进而对加载盘结构参数进行了优化并设计了一种具有正四面体特征的半球形减重结构,实现了传感器的轻量化设计。最后,对优化后Stewart式六维力传感器的性能进行了仿真分析和实验验证。结果表明,基于多目标参数优化结合数值仿真、实验验证可有效提高设计效率和降低设计成本;所设计的减重结构可有效改善Stewart式六维力传感器的质量分布和提高其质量利用率,优化后传感器的质量减小了17.65%且综合性能优异。研究结果可为六维力传感器的轻量化设计和综合性能优化提供参考。
关键词:
六维力传感器,
数值仿真,
质量,
刚度,
灵敏度,
精度
|
|
| [1] |
赵现朝. Stewart结构六维力传感器设计理论与应用研究[D].秦皇岛:燕山大学,2003:9-23.
ZHAO Xian-chao. Design theory and application of the 6-axis f/t sensors based on Stewart platform structure[D]. Qinhuangdao: Yanshan University, 2003: 9-23.
|
|
|
| [2] |
王宣银,尹瑞多.基于Stewart机构的六维力/力矩传感器[J].机械工程学报,2008,44(12):118-122,130. doi:10.3901/jme.2008.12.118
WANG Xuan-yin, YIN Rui-duo. Six-axis force/torque sensor based on Stewart platform [J]. Journal of Mechanical Engineering, 2008, 44(12): 118-122, 130.
doi: 10.3901/jme.2008.12.118
|
|
|
| [3] |
姚建涛,侯雨雷,牛建业,等.大量程预紧式六维力传感器及静态标定研究[J].仪器仪表学报,2009,30(6):1233-1239. doi:10.3321/j.issn:0254-3087.2009.06.022
YAO Jian-tao, HOU Yu-lei, NIU Jian-ye, et al. Large range prestressed six-axis force sensor and study on static calibration[J]. Chinese Journal of Scientific Instrument, 2009, 30(6): 1233-1239.
doi: 10.3321/j.issn:0254-3087.2009.06.022
|
|
|
| [4] |
刘晓宇,盖广洪.Stewart六维力传感器解耦算法优化[J].传感技术学报,2018,31(12):1858-1861,1868. doi:10.3969/j.issn.1004-1699.2018.012.014
LIU Xiao-yu, GAI Guang-hong. Optimization of Stewart six-dimensional force sensor decoupling algorithm[J]. Chinese Journal of Sensors and Actuators, 2018, 31(12): 1858-1861, 1868.
doi: 10.3969/j.issn.1004-1699.2018.012.014
|
|
|
| [5] |
高波,王晨,屈文轩,等.基于局部去耦的重载Stewart 6维力传感器精度与刚度的综合优化设计[J].机器人,2017,39(6):838-843. doi:10.13973/j.cnki.robot.2017.0838
GAO Bo, WANG Chen, QU Wen-xuan, et al. The accuracy and stiffness comprehensive optimal design of the heavy load Stewart six-axis force sensor based on partial decoupling method[J]. Robot, 2017, 39(6): 838-843.
doi: 10.13973/j.cnki.robot.2017.0838
|
|
|
| [6] |
徐家琪,伍万能,孙炜,等.优化极限学习机算法及其在力信息解耦中的应用[J].传感技术学报,2019,32(10):1487-1492. doi:10.3969/j.issn.1004-1699.2019.10.010
XU Jia-qi, WU Wan-neng, SUN Wei, et al. Optimized extreme learning machines and their application in decoupling of multi-component force information[J]. Chinese Journal of Sensors and Actuators, 2019, 32(10): 1487-1492.
doi: 10.3969/j.issn.1004-1699.2019.10.010
|
|
|
| [7] |
韩康,陈立恒,李行,等.高灵敏度大量程六维力传感器设计[J].仪器仪表学报,2019,40(9):61-69. doi:10.19650/j.cnki.cjsi.J1905193
HAN Kang, CHEN Li-heng, LI Xing, et al. Design of a six-axis force sensor with large range and high sensitivity [J]. Chinese Journal of Scientific Instrument, 2019, 40(9): 61-69.
doi: 10.19650/j.cnki.cjsi.J1905193
|
|
|
| [8] |
陈望隆,杨述焱,胡权,等.面向运动力学测量的无线六维力传感器[J].仪器仪表学报,2019,40(4):129-136. doi:10.19650/j.cnki.cjsi.J1904623
CHEN Wang-long, YANG Shu-yan, HU Quan, et al. Wireless six-dimensional force sensor for motion mechanics measurement[J]. Chinese Journal of Scientific Instrument, 2019, 40(4): 129-136.
doi: 10.19650/j.cnki.cjsi.J1904623
|
|
|
| [9] |
吕帮俊,朱石坚,彭利坤,等.Stewart机构刚度映射建模与仿真[J]. 振动与冲击, 2011,30(4):178-181. doi:10.3969/j.issn.1000-3835.2011.04.037
Bang-jun LÜ, ZHU Shi-jian, PENG Li-kun, et al. Stiffness mapping modeling and simulation for Stewart mechanism [J]. Journal of Vibration and Shock, 2011, 30(4): 178-181.
doi: 10.3969/j.issn.1000-3835.2011.04.037
|
|
|
| [10] |
赵延治,焦雷浩,牛智,等.机械解耦自标定并联六维力传感器设计及仿真[J].中国机械工程,2017,28(7):771-778. doi:10.3969/j.issn.1004-132X.2017.07.003
ZHAO Yan-zhi, JIAO Lei-hao, NIU Zhi, et al. Design and simulation of mechanical decoupling self-calibration parallel six dimensional force sensors[J]. China Mechanical Engineering, 2017, 28(7): 771-778.
doi: 10.3969/j.issn.1004-132X.2017.07.003
|
|
|
| [11] |
KANG M K, LEE S, KIM J H. Shape optimization of a mechanically decoupled six-axis force/torque sensor[J].Sensors and Actuators A: Physical, 2014, 209: 41-51. doi:10.1016/j.sna.2014.01.001
doi: 10.1016/j.sna.2014.01.001
|
|
|
| [12] |
李立建,马爱霞,姚建涛,等.柔性并联六维力传感器力映射解析研究[J].机械工程学报,2017,53(7):30-38. doi:10.3901/jme.2017.07.030
LI Li-jian, MA Ai-xia, YAO Jian-tao, et al. Force mapping analytical research of flexure parallel six-axis force/torque sensor [J]. Journal of Mechanical Engineering, 2017, 53(7): 30-38.
doi: 10.3901/jme.2017.07.030
|
|
|
| [13] |
黄维,刘惟伊,刘志恩,等.基于多目标遗传算法的实验目标车底盘结构优化[J].工程设计学报,2021,28(1):80-88. doi:10.3785/j.issn.1006-754X.2021.00.012
HUANG Wei, LIU Wei-yi, LIU Zhi-en, et al. Structure optimization of experimental target vehicle chassis based on multi-objective genetic algorithm[J]. Chinese Journal of Engineering Design, 2021, 28(1): 80-88.
doi: 10.3785/j.issn.1006-754X.2021.00.012
|
|
|
| [14] |
张韬,杨德华,肖心怡,等.Stewart型六维力传感器的标定方法研究[J].传感技术学报,2020,33(9):1274-1278. doi:10.3969/j.issn.1004-1699.2020.09.008
ZHANG Tao, YANG De-hua, XIAO Xin-yi, et al. Research on calibration method of Stewart six-component force sensor[J]. Chinese Journal of Sensors and Actuators, 2020, 33(9): 1274-1278.
doi: 10.3969/j.issn.1004-1699.2020.09.008
|
|
|
| [15] |
付立悦,宋爱国.六维力传感器静态标定系统误差分析[J].计量学报,2019,40(2):295-299. doi:10.3969/j.issn.1000-1158.2019.02.20
FU Li-yue, SONG Ai-guo. Error analysis of six-axis force/torque sensor's static calibration system[J].Acta Metrologica Sinica, 2019, 40(2): 295-299.
doi: 10.3969/j.issn.1000-1158.2019.02.20
|
|
|
| [16] |
王志军,刘朋,谷向飞,等.基于曲线拟合的正交并联六维力传感器静态标定[J].机械设计与研究,2020,36(4):33-37. doi:10.13952/j.cnki.jofmdr.2020.0142
WANG Zhi-jun, LIU Peng, GU Xiang-fei, et al. Static calibration research on orthogonal parallel six-dimensional force sensor based on curve fitting[J]. Machine Design & Research, 2020, 36(4): 33-37.
doi: 10.13952/j.cnki.jofmdr.2020.0142
|
|
|
| [17] |
刘运毅,黎相成,黄约,等.基于极大似然估计的工业机器人腕部6维力传感器在线标定[J].机器人,2019,41(2):216-221,231. doi:10.13973/j.cnki.robot.180203
LIU Yun-yi, LI Xiang-cheng, HUANG Yue, et al. Online calibration for the 6-axis force sensor in the wrist of industrial robot based on maximum likelihood estimation[J]. Robot, 2019, 41(2): 216-221, 231.
doi: 10.13973/j.cnki.robot.180203
|
|
|
| [18] |
熊铃华,陈守良,张克武,等.一种六维轮力传感器标定分析[J].机电工程,2016,33(9):1094-1097,1139. doi:10.3969/j.issn.1001-4551.2016.09.012
XIONG Ling-hua, CHEN Shou-liang, ZHANG Ke-wu, et al. Calibration and analysis of six-dimensional wheel force sensor[J]. Journal of Mechanical & Electrical Engineering, 2016, 33(9): 1094-1097, 1139.
doi: 10.3969/j.issn.1001-4551.2016.09.012
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|