| Optimization Design |
|


|
|
|
| Structural design and stiffness optimization of mechanical arm with super large telescopic ratio for ash silo cleaning |
Jia-ning ZHANG( ),Ming-lu ZHANG,Man-hong LI(),Tan ZHANG ),Ming-lu ZHANG,Man-hong LI(),Tan ZHANG |
| School of Mechanical Engineering, Hebei University of Technology, Tianjin 300401, China |
|
|
|
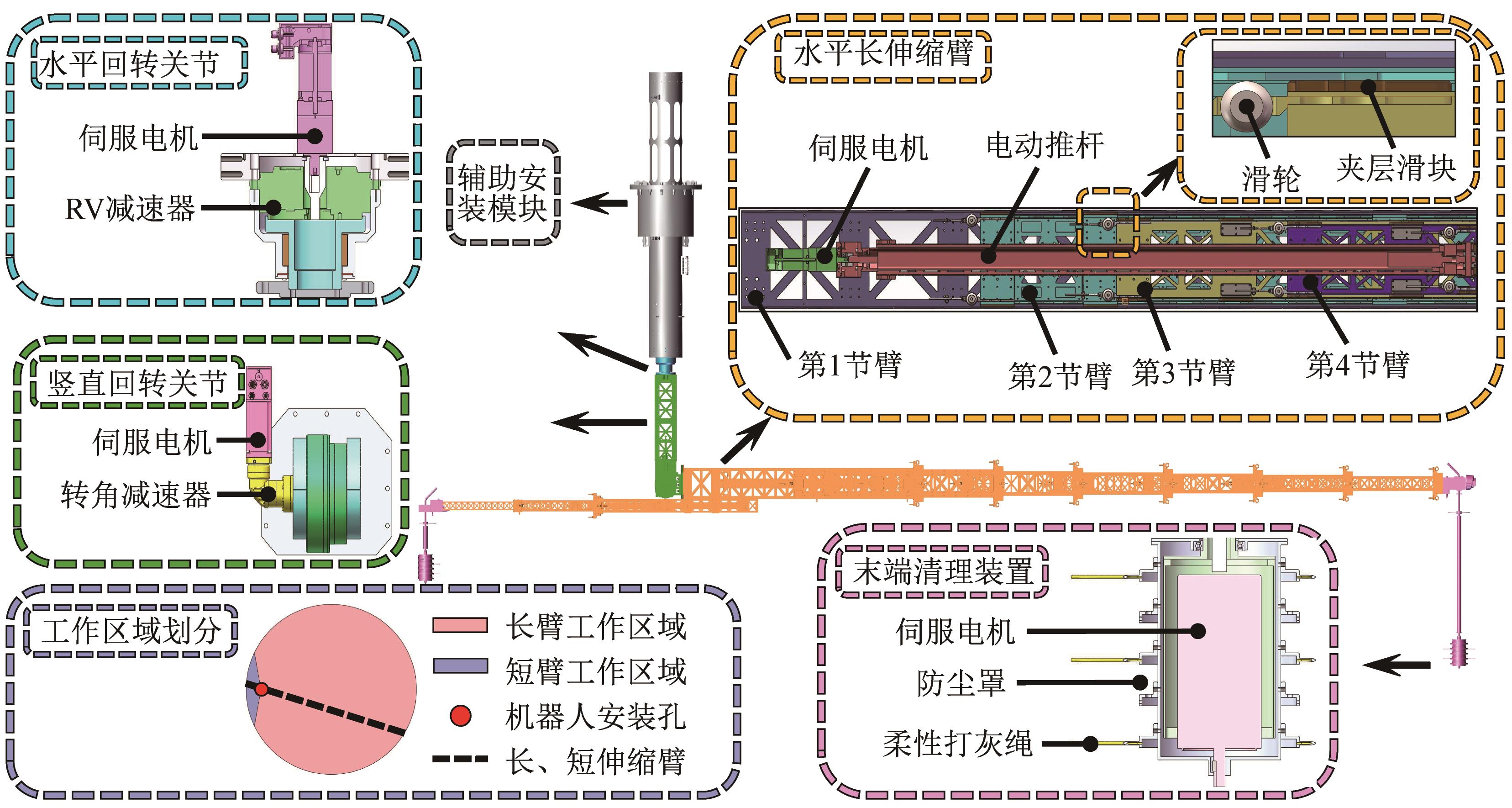
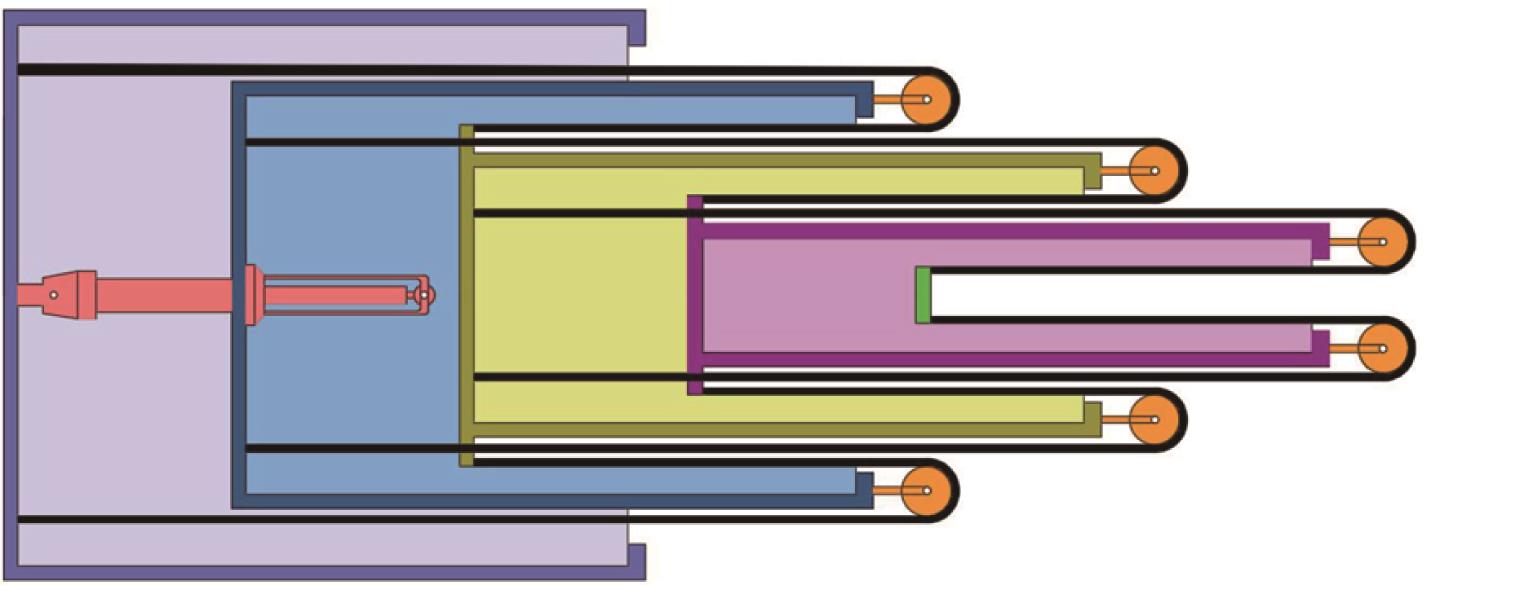
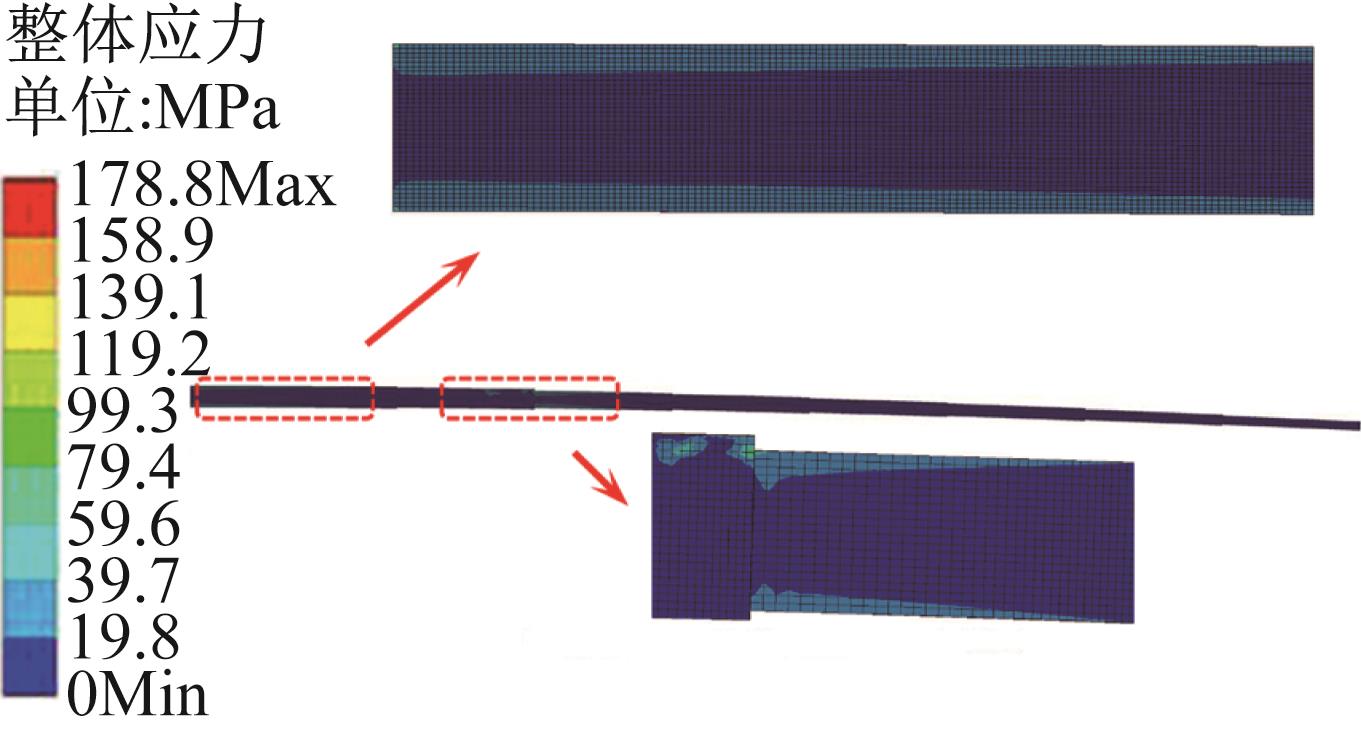
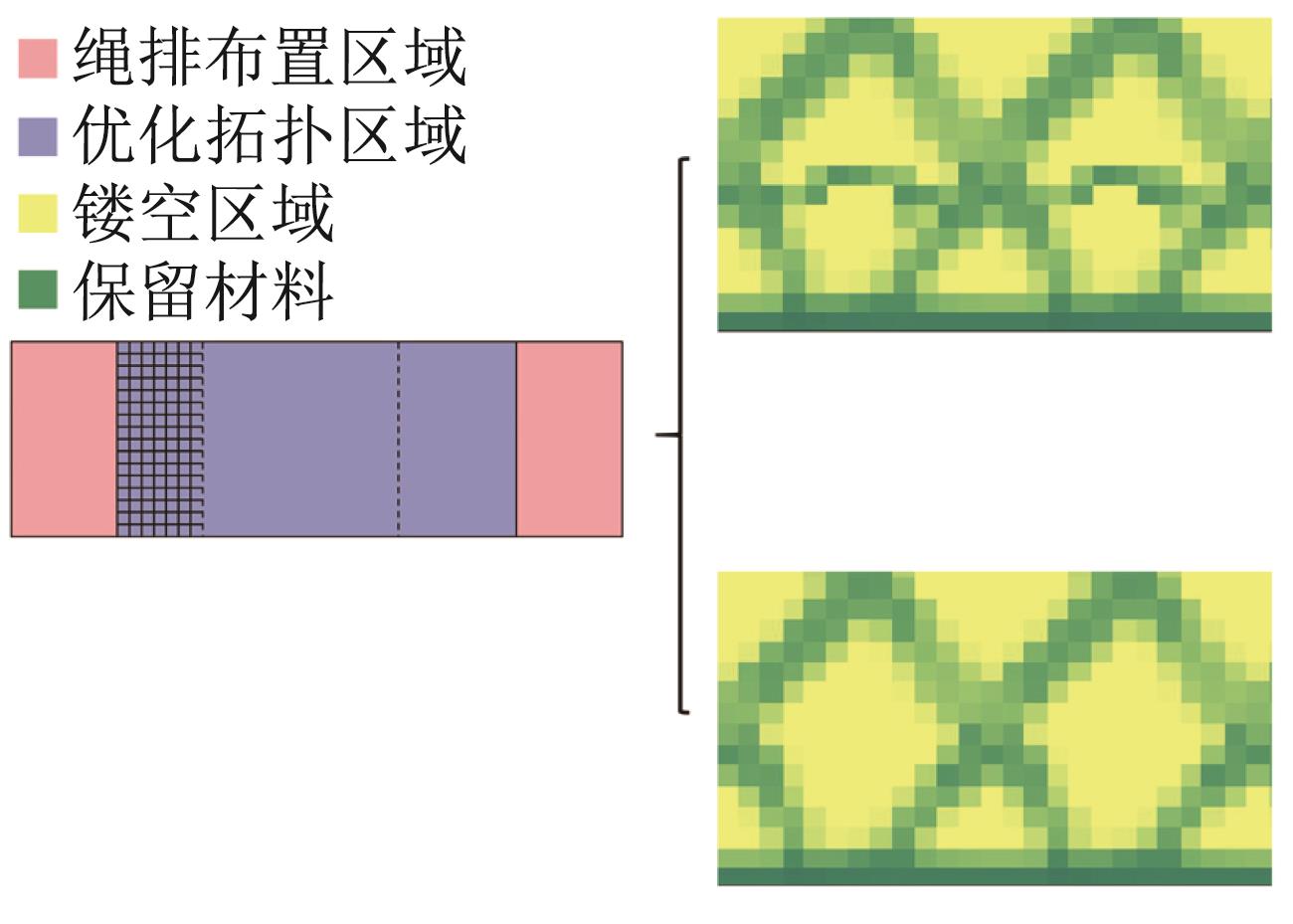
Abstract The phenomena of dust sticking, hardening and bridging on the inner wall of ash silo in thermal power plant seriously affect the safe operation of thermal power units, so it is necessary to clean the ash on the inner wall of ash silo regularly. In view of the limited working range of the existing ash silo cleaning robot and the poor cleaning effect caused by the insufficient telescopic ratio and low stiffness of its mechanical arms, reciprocating rope row drive mechanism and multi-level nested box-type arm body was introduced into the design of the overall structure of the mechanical arm with large stiffness and telescopic ratio of 1: 7. Therefore, an efficient working robot for the all-round cleaning of the inner wall of the ash silo was developed. Based on the depth analysis of the intrinsic structure of the cascade arm and the internal and external coupling force system of the mechanical arm combined with Castigliano's second theorem and the principle of linear elasticity, an overall stiffness model of the variable length mechanical arm under complex alternating loads was established. Considering the stress distribution characteristics of the mechanical arm under extreme working conditions, through the periodic topology optimization of hole shape of each discrete sub region in the low stress region, a global stiffness optimization method of the mechanical arm under severe mass constraint was proposed. The performance simulation and test results showed that the mass of the mechanical arm was greatly reduced after optimization, and the mechanical arm had ideal telescopic interval and stiffness characteristics. There was a certain deviation between the simulation value and test value of the end offset of the mechanical arm, which was caused by the machining and assembly errors of the mechanical arm. The research results provide an important reference for the structural design and stiffness optimization of ash silo cleaning robot.
|
|
Received: 02 September 2021
Published: 05 September 2022
|
|
|
|
Corresponding Authors:
Man-hong LI
E-mail: melohebut@163.com;lmh9181219@163.com
|
面向灰库清理的超大伸缩比机械臂结构设计与刚度优化
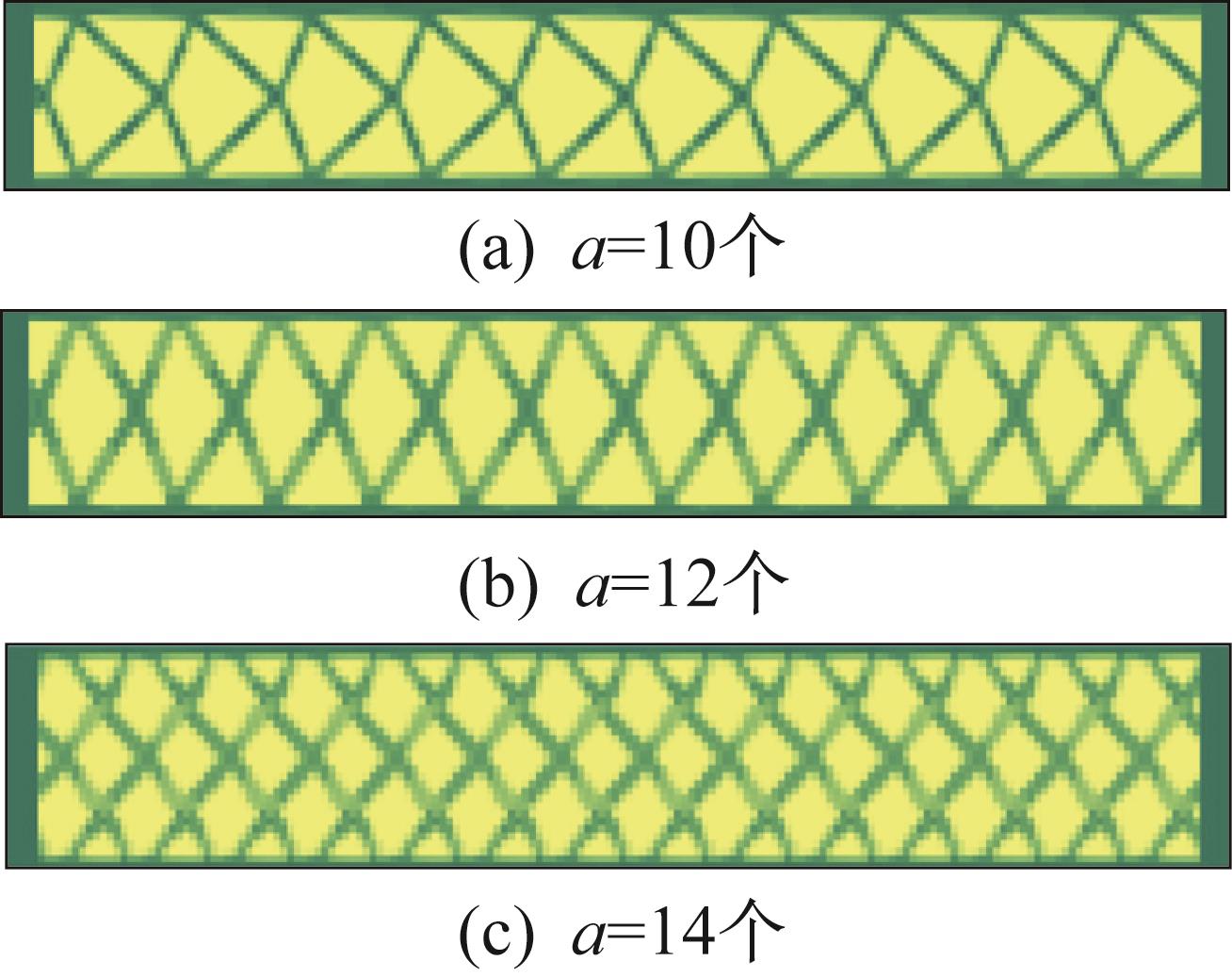
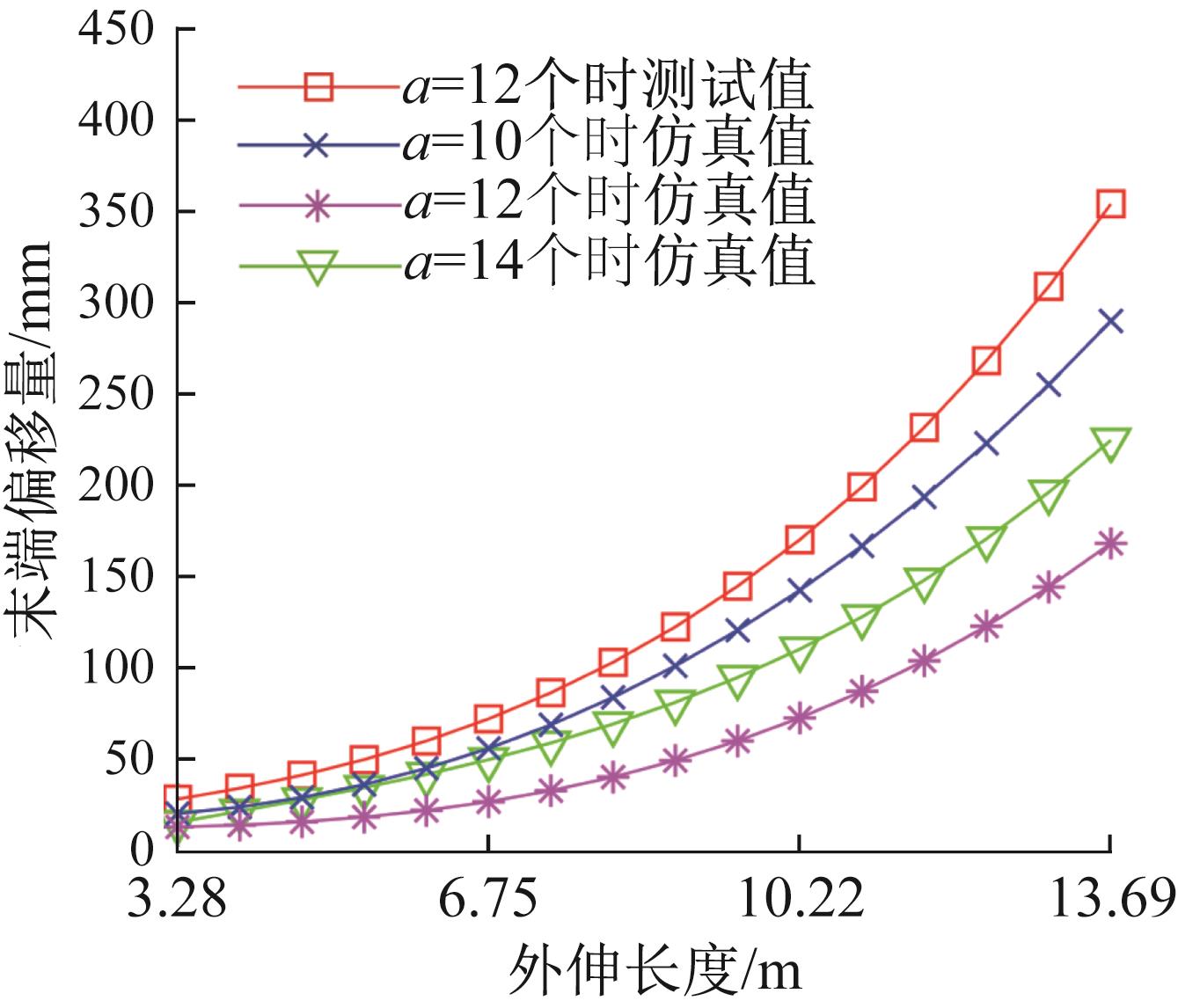
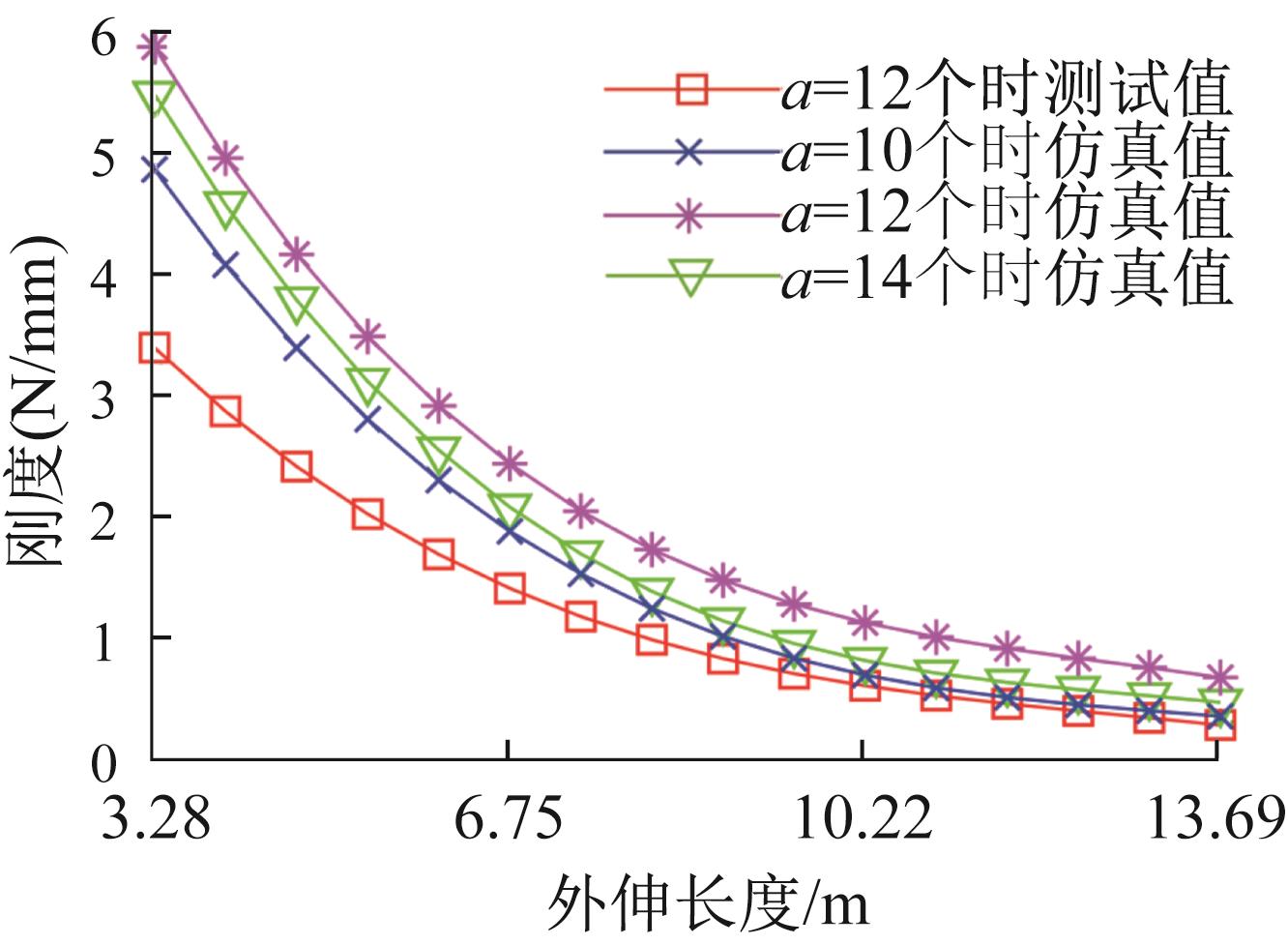
火电厂灰库内壁粉尘粘壁、板结、搭桥等现象严重影响火电机组的安全运营,因此须对灰库内壁积灰进行定期全域清理。针对现有灰库清理机器人作业区间有限及因机械臂伸缩比不足、刚度不大导致的清理效果不佳等问题,通过设计引入往复绳排驱动机构和多级嵌套箱型臂体,设计了大刚度、伸缩比为1∶7的机械臂整体结构,研制出一款面向灰库内壁全方位清理的高效作业机器人。基于机械臂级联臂体本征结构和内外耦合作用力系深度分析,结合Castigliano第二定理和线弹性原理,建立了在复杂交变载荷作用下变长度机械臂整体刚度模型。综合考虑在极端工况下机械臂应力分布特征,通过周期性拓扑优化低应力区各离散子域孔洞形状,提出了在严苛质量约束下机械臂全域刚度优化方法。机械臂性能仿真和测试实验表明:优化后机械臂质量大幅减小,且具备理想的伸缩区间和刚度特性;机械臂末端偏移量的测试值与仿真值存在一定偏差,系机械臂加工和装配误差所致。研究结果为灰库清理机器人的结构设计和刚度优化提供了重要参考。
关键词:
伸缩机械臂,
结构设计,
刚度优化,
灰库清理
|
|
| [1] |
李少华,刘冰,彭红文,等.燃煤机组耦合生物质直燃发电技术研究[J].电力勘测设计,2021(6):26-31,36.
LI Shao-hua, LIU Bing, PENG Hong-wen, et al. Bio-mass direct combustion of co-firing technology research in coal-fired power plants[J]. Electric Power Survey & Design, 2021(6): 26-31, 36.
|
|
|
| [2] |
潘尔生,田雪沁,徐彤,等.火电灵活性改造的现状、关键问题与发展前景[J].电力建设,2020,41(9):58-68. doi:10.12204/j.issn.1000-7229.2020.09.007
PAN Er-sheng, TIAN Xue-qin, XU Tong. Status, crit-ical problems and prospects of flexibility retrofit of thermal power in China[J]. Electric Power Construction, 2020, 41(9): 58-68.
doi: 10.12204/j.issn.1000-7229.2020.09.007
|
|
|
| [3] |
SINGH O K, KAUSHIK S C. Energy and exergy analysis and optimization of Kalina cycle coupled with a coal fired steam power plant[J]. Applied Thermal Engineering, 2013, 51(1/2): 787-800. doi:10.1016/j.applthermaleng.2012.10.006
doi: 10.1016/j.applthermaleng.2012.10.006
|
|
|
| [4] |
王宝存,侯泽健,李鹏飞.电厂粉煤灰筛选除湿设备的设计与研究[J].粉煤灰综合利用,2018(2):29-30,34. doi:10.3969/j.issn.1005-8249.2018.02.007
WANG Bao-cun, HOU Ze-jian, LI Peng-fei. Design and research of screening dehumidification equipment with power plant fly ash[J]. Fly Ash Comprehensive Utilization, 2018(2): 29-30, 34.
doi: 10.3969/j.issn.1005-8249.2018.02.007
|
|
|
| [5] |
刘建民,陈国庆,黄启龙,等.燃煤脱硝机组空气预热器蓄热片表面飞灰沉积板结机理研究[J].中国电机工程学报,2016,36(S1):132-139.
LIU Jian-min, CHEN Guo-qing, HUANG Qi-long, et al. Study on mechanism of fly ash deposition and hardening on the air preheater regenerative piece surface of the coal-fired and denitration unit[J]. Proceedings of the CSEE, 2016, 36(S1): 132-139.
|
|
|
| [6] |
罗宽.井下煤仓清仓机器人机械臂的设计与分析[J].煤炭技术,2013,32(8):41-43. doi:10.3969/j.issn.1008-8725.2013.08.021
LUO Kuan. Design and analysis of underound bunker clearing robot manipulator[J]. Coal Technology, 2013, 32(8): 41-43.
doi: 10.3969/j.issn.1008-8725.2013.08.021
|
|
|
| [7] |
曹毅,臧义,刁伟华.柔性驱动立筒仓清理机器人转动控制系统建模及简化[J].现代制造工程,2014(4):24-29. doi:10.3969/j.issn.1671-3133.2014.04.006
CAO Yi, ZANG Yi, DIAO Wei-hua. Systematic modeling and simplification on revolving control of flexible drive silo cleaning robot[J]. Modern Manufacturing Engineering, 2014(4): 24-29.
doi: 10.3969/j.issn.1671-3133.2014.04.006
|
|
|
| [8] |
DANDAN K, ALBITAR H, ANANIEV A, et al. Motion control of siro: The silo cleaning robot[J]. International Journal of Advanced Robotic Systems, 2015, 12: 184.
|
|
|
| [9] |
孙龙飞,房立金,梁风勇.新型工业机器人结构设计及其全域刚度预估方法[J].机器人,2018,40(5): 673-684. doi:10.1109/iisr.2018.8535652
SUN Long-fei, FANG Li-jin, LIANG Feng-yong. Str-ucture design and global stiffness protection method of a novel industrial robot[J]. Robot, 2018, 40(5): 673-684.
doi: 10.1109/iisr.2018.8535652
|
|
|
| [10] |
刘双杰,郝永平.S型折叠式微悬臂梁刚度计算[J].光学精密工程,2013,21(2):388-393.
LIU Shuang-jie, HAO Yong-ping. Calculation for spr-ing constants of folded serpentine microcantilevers[J].Optics and Precision Engineering, 2013, 21(2): 388-393.
|
|
|
| [11] |
关立文,陈志雄,刘春,等.钻铆机器人静刚度建模及优化[J].清华大学学报(自然科学版),2021,61(9):965-971.
GUAN Li-wen, CHEN Zhi-xiong, LIU Chun, et al. Static stiffness modeling for optimizing drilling and riveting robots[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(9): 965-971.
|
|
|
| [12] |
MEMAR A H, ESFAHANI E T. A robot gripper with variable stiffness actuation for enhancing collision safety[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 6607-6616. doi:10.1109/tie.2019.2938475
doi: 10.1109/tie.2019.2938475
|
|
|
| [13] |
邵忠喜,吴石磊,富宏亚.一种新型大口径光栅拼接柔性定位机构刚度分析[J].机械工程学报,2018,54(13):117-125. doi:10.3901/jme.2018.13.117
SHAO Zhong-xi, WU Shi-lei, FU Hong-ya. Stiffness analysis of a novel flexible positioning mechanism for large-aperture grating tiling[J]. Journal of Mechanical Engineering, 2018, 54(13): 117-125.
doi: 10.3901/jme.2018.13.117
|
|
|
| [14] |
吴青龙,周奇才,熊肖磊,等.塔式起重机臂架腹杆布局及尺寸优化设计[J].东北大学学报(自然科学版),2018,39(9):1309-1314.
WU Qing-long, ZHOU Qi-cai, XIONG Xiao-lei, et al.Layout and size optimization design of tower crane boom webs[J]. Journal of Northeastern University (Natural Science), 2018, 39(9): 1309-1314.
|
|
|
| [15] |
周奇才,吴青龙,熊肖磊,等.塔式起重机臂架周期性拓扑优化设计[J].同济大学学报(自然科学版),2017,45(10):1498-1505.
ZHOU Qi-cai, WU Qing-long, XIONG Xiao-lei, et al.Periodic topology optimization design of tower crane boom[J]. Journal of Tongji University (Natural Science), 2017, 45(10): 1498-1505.
|
|
|
| [16] |
毛艳,成凯.基于Hopfield神经网络的单缸插销式伸缩臂伸缩路径优化[J].吉林大学学报(工学版),2020,50(1):53-65.
MAO Yan, CHENG Kai. Telescopic path optimization of a single-cylinder pin-type multi-section boom based on Hopfield neural network[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(1): 53-65.
|
|
|
| [17] |
魏雅君,邱国梁,丁广和,等.一种重载码垛机器人结构优化设计方法[J].工程设计学报,2020,27(3):332-339. doi:10.3785/j.issn.1006-754X.2020.00.040
WEI Ya-jun, QIU Guo-liang, DING Guang-he, et al. A structural optimization design method for heavy-duty palletizing robot[J]. Chinese Journal of Engineering Design, 2020, 27(3): 332-339.
doi: 10.3785/j.issn.1006-754X.2020.00.040
|
|
|
| [18] |
刘昊,周成,于存贵.随车起重机伸缩臂截面多目标优化[J].机械设计与研究,2020,36(1):173-176.
LIU Hao, ZHOU Cheng, YU Cun-gui. Multi-objective optimization of telescopic boom section of truckmounted crane[J]. Machine Design & Research, 2020, 36(1): 173-176.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|