| 机器人与机构设计 |
|


|
|
|
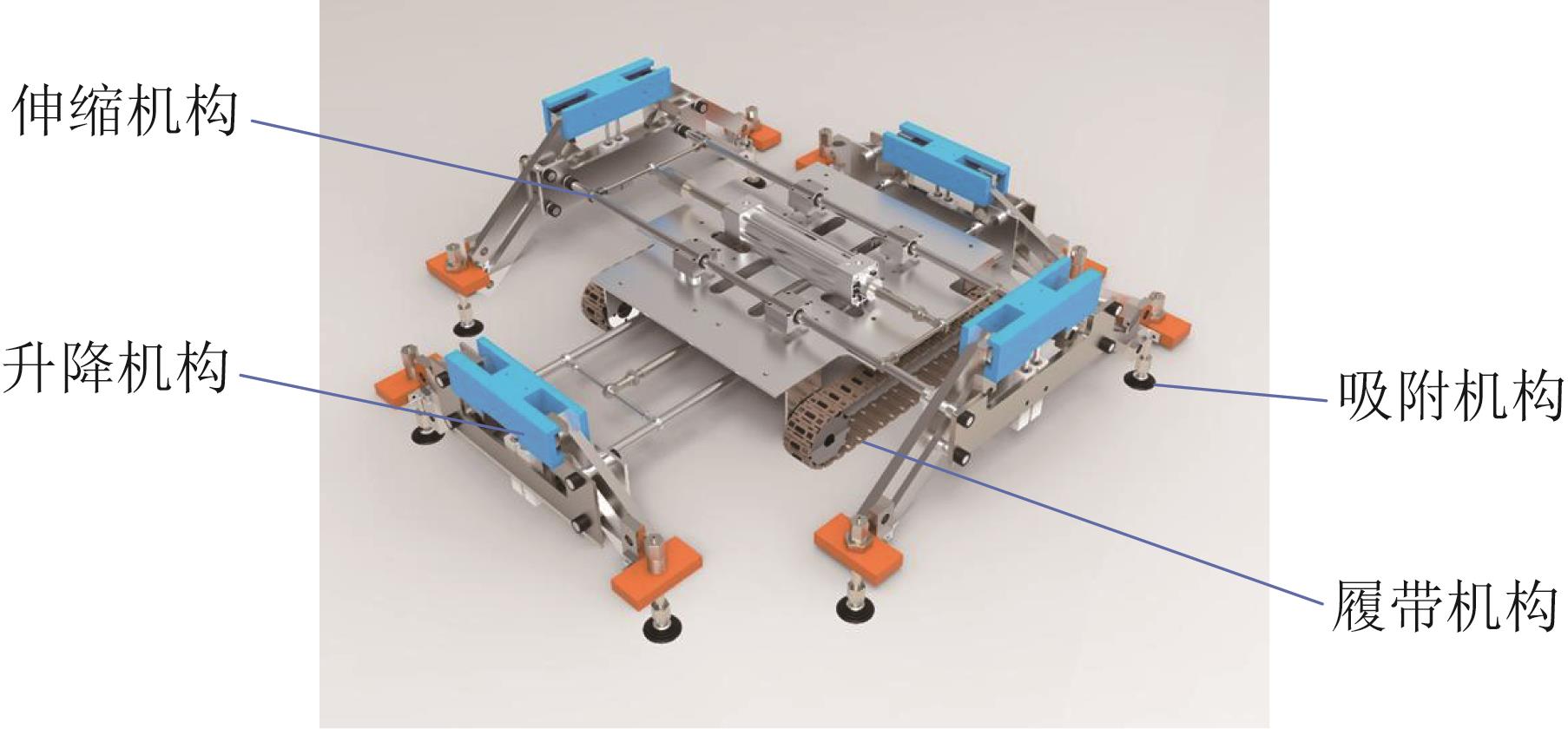
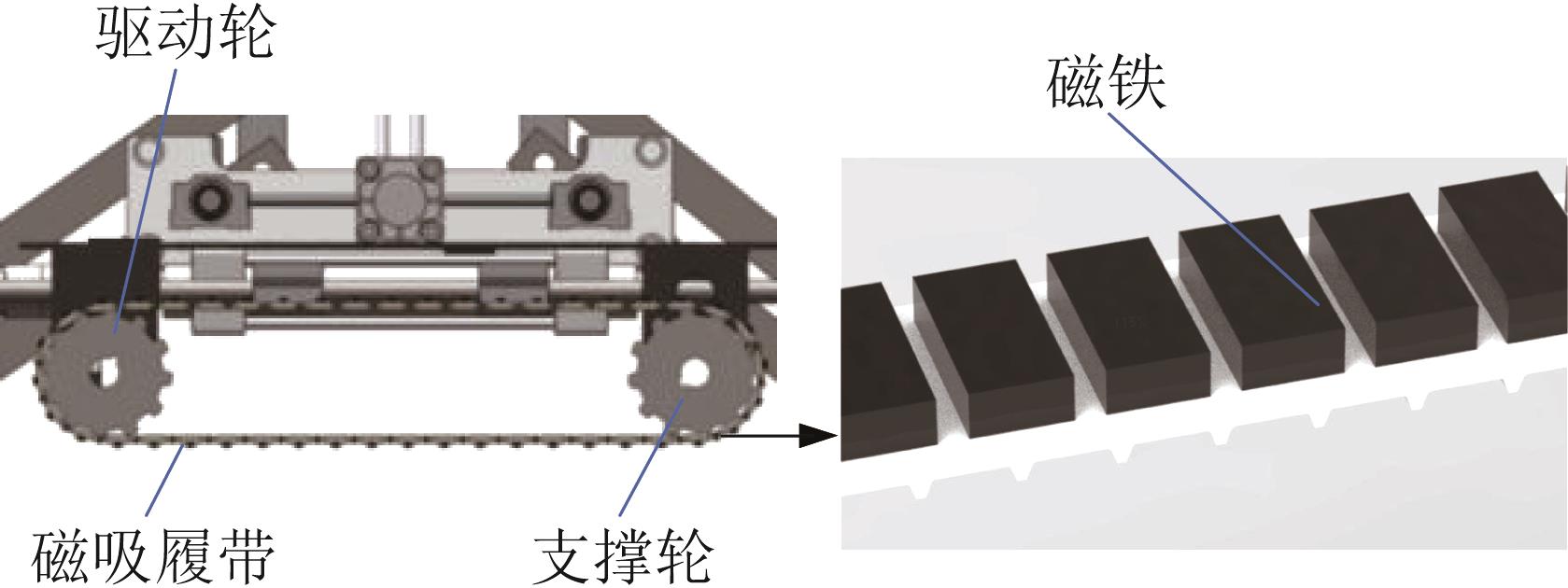
| 风力发电机叶片检测机器人的设计与分析 |
张岩1( ),胡晓林2,王凯铭2,黄华2() ),胡晓林2,王凯铭2,黄华2() |
1.甘肃省特种设备检验检测研究院,甘肃 兰州 730050
2.兰州理工大学 机电工程学院,甘肃 兰州 730050 |
|
| Design and analysis of wind-generator set blade inspection robot |
| Yan ZHANG1(),Xiaolin HU2,Kaiming WANG2,Hua HUANG2() |
1.Gansu Province Special Equipment Inspection and Testing Institute, Lanzhou 730050, China
2.School of Mechanical and Electrical Engineering, Lanzhou University of Technology, Lanzhou 730050, China |
引用本文:
张岩, 胡晓林, 王凯铭, 黄华. 风力发电机叶片检测机器人的设计与分析[J]. 工程设计学报, 2025, 32(2): 159-168.
Yan ZHANG, Xiaolin HU, Kaiming WANG, Hua HUANG. Design and analysis of wind-generator set blade inspection robot[J]. Chinese Journal of Engineering Design, 2025, 32(2): 159-168.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.04.165
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I2/159
|
| 1 |
陈先龙, 王秀丽, 陈洁, 等. 考虑分布式可再生能源交易的风电商与电动汽车充电站协同优化调度[J]. 电网技术, 2023, 47(11): 4598-4610.
CHEN X L, WANG X L, CHEN J, et al. Optimal collaborative scheduling of wind power operators and electric vehicle charging stations considering distributed renewable energy trading[J]. Power System Technology, 2023, 47(11): 4598-4610.
|
| 2 |
王道累, 肖佳威, 刘易腾, 等. 风电机组叶片损伤检测技术研究与进展[J]. 中国电机工程学报, 2023, 43(12): 4614-4631.
WANG D L, XIAO J W, LIU Y T, et al. Research and development of wind turbine blade damage detection technology[J]. Proceedings of the CSEE, 2023, 43(12): 4614-4631.
|
| 3 |
张小俊, 吴亚淇, 刘昊学, 等. 轮足式磁吸附越障爬壁机器人设计与分析[J]. 机械工程学报, 2024, 60(1): 248-261. doi:10.3901/jme.2024.01.248
ZHANG X J, WU Y Q, LIU H X, et al. Design and analysis of wheel-footed magnetic adsorption wall-climbing robot with passing obstacles capability[J]. Journal of Mechanical Engineering, 2024, 60(1): 248-261.
doi: 10.3901/jme.2024.01.248
|
| 4 |
杨培, 张明路, 孙凌宇. 爬壁机器人磁黏附模块设计分析与参数优化[J]. 工程设计学报, 2024, 31(5): 592-602.
YANG P, ZHANG M L, SUN L Y. Design analysis and structural parameter optimization for magnetic adsorption module of wall-climbing robot[J]. Chinese Journal of Engineering Design, 2024, 31(5): 592-602.
|
| 5 |
郑勇峰, 刘昊学. 自适应轮足式爬壁机器人设计与分析[J]. 机械设计, 2021, 38(9): 105-112.
ZHENG Y F, LIU H X. Design and analysis of the self-adaptive wheel-footed wall-climbing robot[J]. Journal of Machine Design, 2021, 38(9): 105-112.
|
| 6 |
霍平, 徐阳阳, 于江涛, 等. 一种新型足式爬壁机器人设计[J]. 实验室研究与探索, 2021, 40(10): 77-81.
HUO P, XU Y Y, YU J T, et al. Design of a new foot wall climbing robot[J]. Research and Exploration in Laboratory, 2021, 40(10): 77-81.
|
| 7 |
徐阳阳, 于江涛, 李占贤, 等. 足式爬壁机器人的控制系统和实验研究[J]. 传感器与微系统, 2023, 42(9): 14-17.
XU Y Y, YU J T, LI Z X, et al. Control system and experimental research of foot-type wall-climbing robot[J]. Transducer and Microsystem Technologies, 2023, 42(9): 14-17.
|
| 8 |
LEE D G, OH S, SON H I. Wire-driven parallel robotic system and its control for maintenance of offshore wind turbines[C]//2016 IEEE International Conference on Robotics and Automation. New York: IEEE, 2016: 902-908.
|
| 9 |
SAHBEL A, ABBAS A, SATTAR T. System design and implementation of wall climbing robot for wind turbine blade inspection[C]//2019 International Conference on Innovative Trends in Computer Engineering. New York: IEEE, 2019: 242-247.
|
| 10 |
李响, 刘书海, 肖华平, 等. 风电叶片检测机器人设计与运动仿真研究[J]. 现代制造工程, 2023(4): 51-58.
LI X, LIU S H, XIAO H P, et al. Design and motion simulation of a wind turbine blade detection robot[J]. Modern Manufacturing Engineering, 2023(4): 51-58.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|