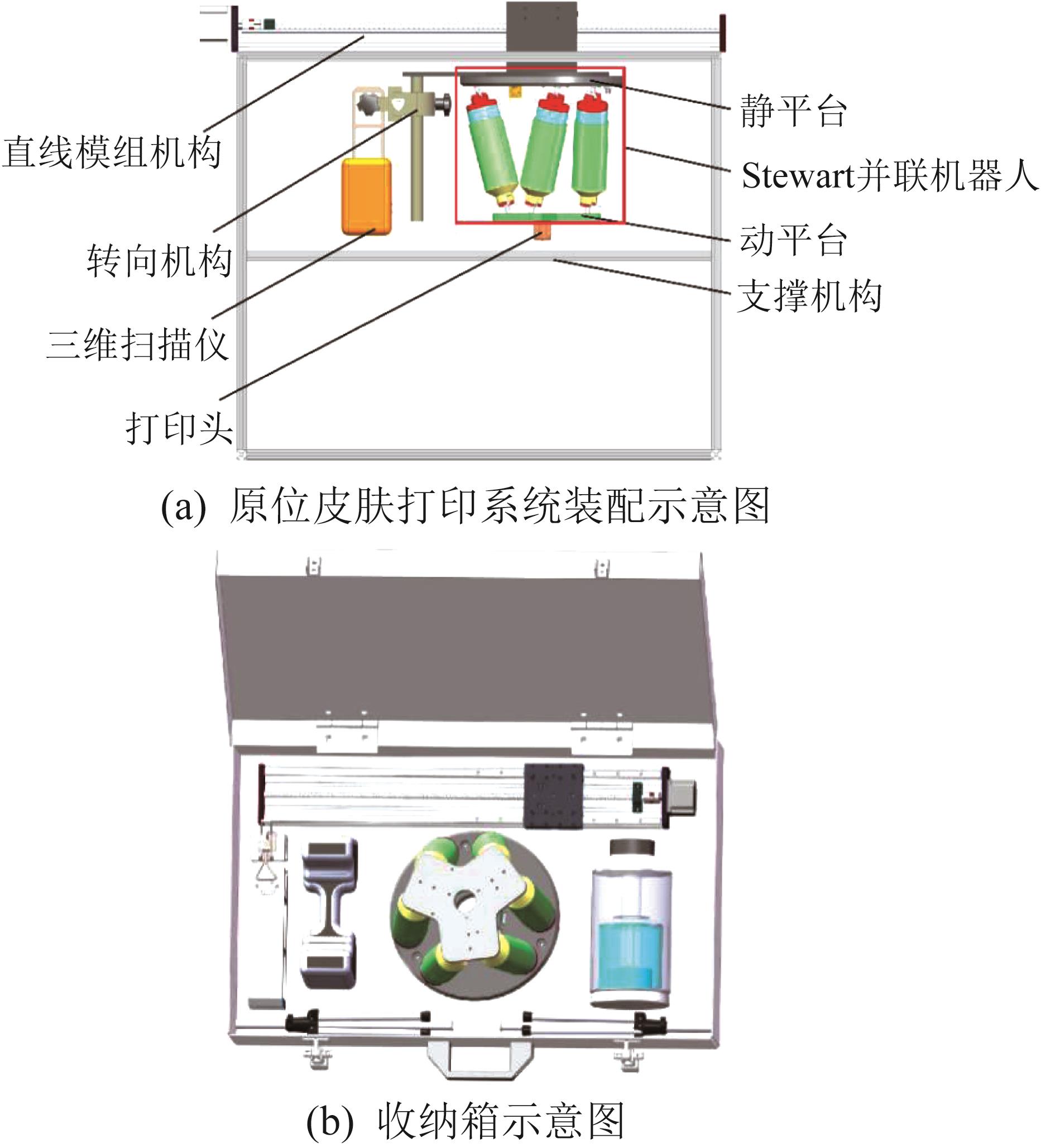
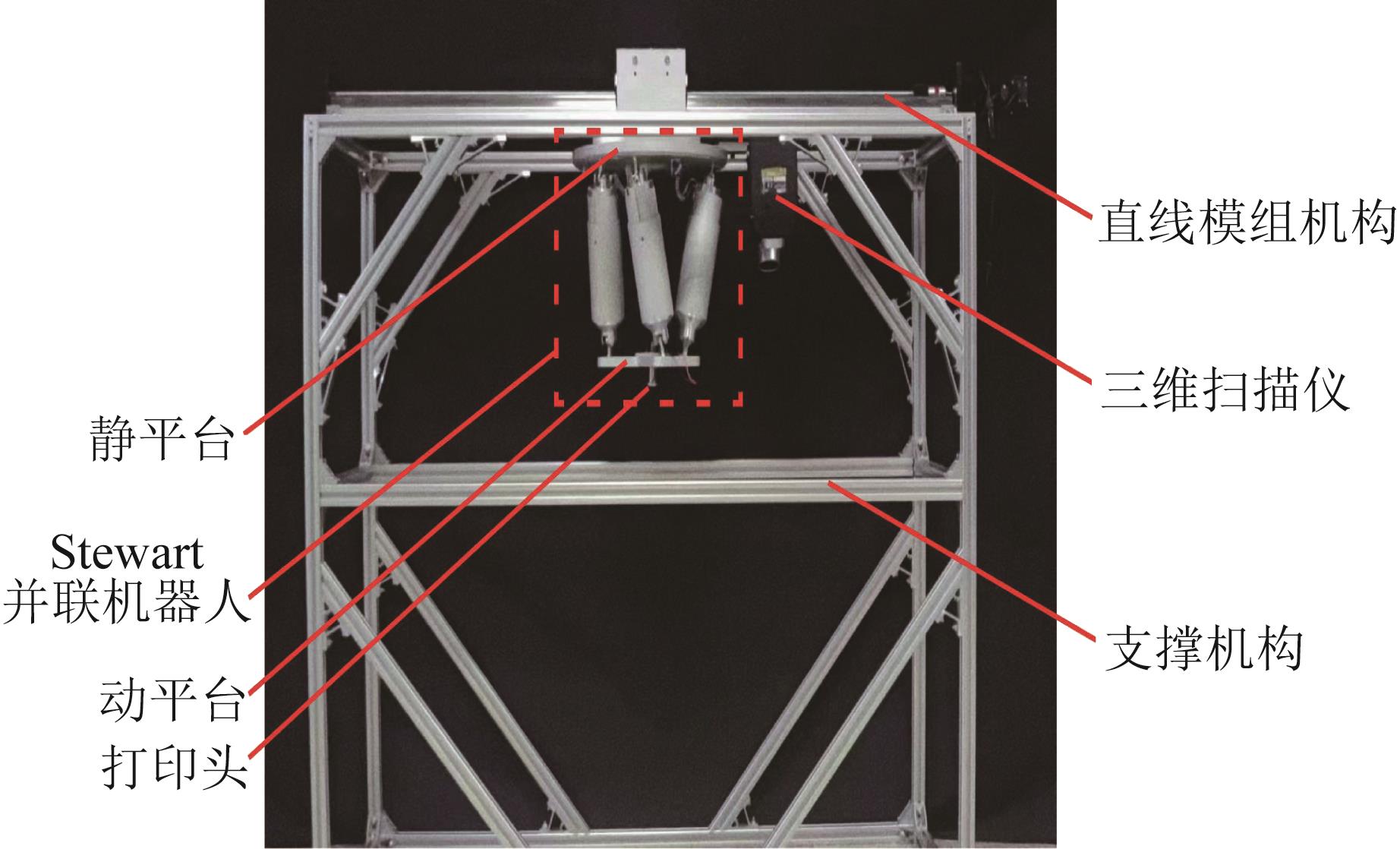
| 整机和系统设计 |
|

|
|
|
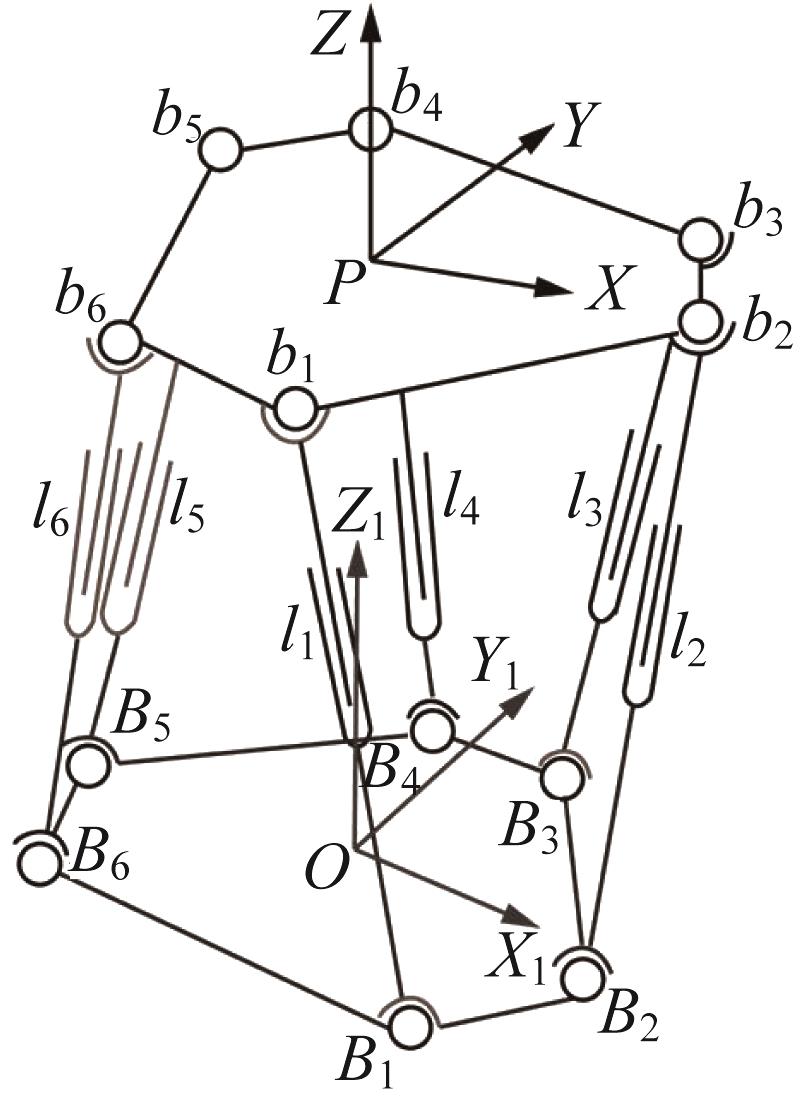
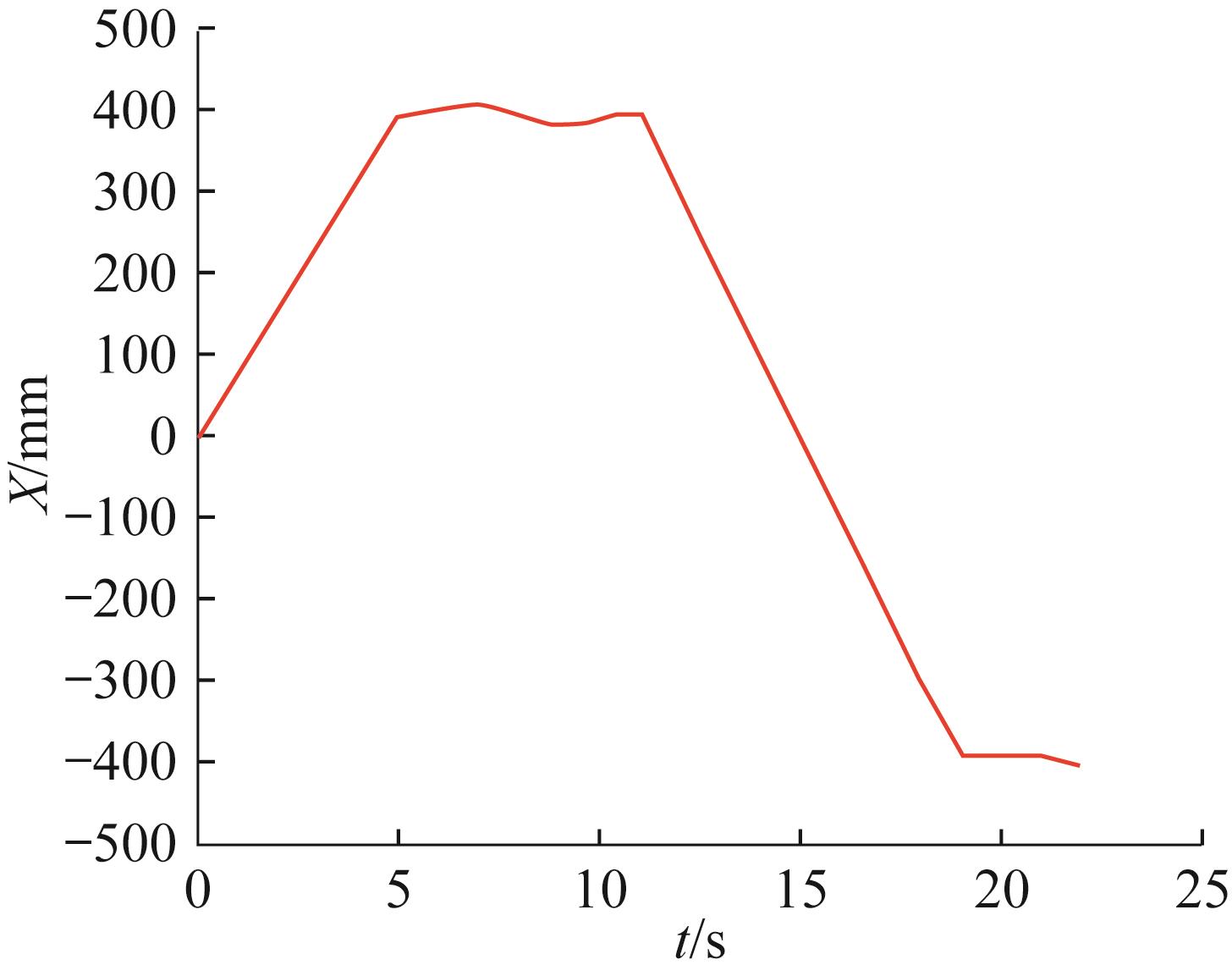
| 面向皮肤大面积损伤修复的原位打印系统工作空间分析 |
朱慧轩1,2,3,4( ),崔广泽1,2,3,李炳南2,3,郭凯2,3,王蔚1,李松2,3() ),崔广泽1,2,3,李炳南2,3,郭凯2,3,王蔚1,李松2,3() |
1.沈阳工业大学 机械工程学院,辽宁 沈阳 110870
2.中国科学院沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳 110016
3.中国科学院 机器人与智能制造创新研究院,辽宁 沈阳 110169
4.中国科学院大学,北京 100049 |
|
| Workspace analysis of in situ printing system for repairing large-skin wounds |
| Huixuan ZHU1,2,3,4(),Guangze CUI1,2,3,Bingnan LI2,3,Kai GUO2,3,Wei WANG1,Song LI2,3() |
1.School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870, China
2.State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
3.Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China
4.University of Chinese Academy of Sciences, Beijing 100049, China |
引用本文:
朱慧轩,崔广泽,李炳南,郭凯,王蔚,李松. 面向皮肤大面积损伤修复的原位打印系统工作空间分析[J]. 工程设计学报, 2024, 31(4): 529-537.
Huixuan ZHU,Guangze CUI,Bingnan LI,Kai GUO,Wei WANG,Song LI. Workspace analysis of in situ printing system for repairing large-skin wounds[J]. Chinese Journal of Engineering Design, 2024, 31(4): 529-537.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.202
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I4/529
|
| 1 |
STANTON D N, GANGULI-INDRA G, INDRA A K, et al. Bioengineered efficacy models of skin disease: advances in the last 10 years[J]. Pharmaceutics, 2022, 14(2): 319.
|
| 2 |
CHOUHAN D, DEY N, BHARDWAJ N, et al. Emerging and innovative approaches for wound healing and skin regeneration: current status and advances[J]. Biomaterials, 2019, 216: 119267.
|
| 3 |
ZENG D, SHEN S H, FAN D D. Molecular design, synthesis strategies and recent advances of hydrogels for wound dressing applications[J]. Chinese Journal of Chemical Engineering, 2021, 30: 308-320.
|
| 4 |
PISANI S, DORATI R, SCOCOZZA F, et al. Preliminary investigation on a new natural based poly (gamma-glutamic acid)/Chitosan bioink[J]. Journal of Biomedical Materials Research Part B: Applied Biomaterials, 2020, 108(7): 2718-2732.
|
| 5 |
NOROUZI M, BOROUJENI S M, OMIDVARKOR DSHOULI N, et al. Advances in skin regeneration: application of electrospun scaffolds[J]. Advanced Healthcare Materials, 2015, 4(8): 1114-1133.
|
| 6 |
王瑞.生物3D打印技术构建dECM基人工皮肤的研究[D].泉州:华侨大学,2021.
WANG R. Research on 3D bioprinting technology to construct dECM-based artificial skin[D]. Quanzhou: Huaqiao University, 2021.
|
| 7 |
MURPHY S V, ATALA A. 3D bioprinting of tissues and organs[J]. Nature Biotechnology, 2014, 32: 773-785.
|
| 8 |
TSENG H, GAGE J A, HAISLER W L, et al. A high-throughput in vitro ring assay for vasoactivity using magnetic 3D bioprinting[J]. Scientific Reports, 2016, 6: 30640.
|
| 9 |
OZBOLAT I T. Bioprinting scale-up tissue and organ constructs for transplantation[J]. Trends in Biotechnology, 2015, 33(7): 395-400.
|
| 10 |
NG W L, WANG S, YEONG W Y, et al. Skin bioprinting: impending reality or fantasy?[J]. Trends in Biotechnology, 2016, 34(9): 689-699.
|
| 11 |
PARK J A, LEE H R, PARK S Y, et al. Self-organization of fibroblast-laden 3D collagen microstructures from inkjet-printed cell patterns[J]. Advanced Biosystems, 2020, 4(5): 1900280.
|
| 12 |
PARK J A, YOON S, KWON J, et al. Freeform micropatterning of living cells into cell culture medium using direct inkjet printing[J]. Scientific Reports, 2017, 7: 14610.
|
| 13 |
YOON S, PARK J A, LEE H R, et al. Inkjet-spray hybrid printing for 3D freeform fabrication of multilayered hydrogel structures[J]. Advanced Healthcare Materials, 2018, 7(14): e1800050.
|
| 14 |
连伟龙,连芩,焦天,等.皮肤修复生物3D打印的研究进展与挑战[J].光电工程,2021,48(8):210105.
LIAN W L, LIAN Q, JIAO T, et al. The research progress and challenge of 3D bioprinting for skin repairing[J]. Opto-Electronic Engineering, 2021, 48(8): 210105.
|
| 15 |
HAKIMI N, CHENG R, LENG L, et al. Handheld skin printer: in situ formation of planar biomaterials and tissues[J]. Lab on a Chip, 2018, 18(10): 1440-1451.
|
| 16 |
赵占盈,徐铭恩,石然,等.基于细胞3D打印技术的肿瘤药物筛选细胞芯片研究[J].中国生物医学工程学报,2014,33(2):161-169.
ZHAO Z Y, XU M E, SHI R, et al. Research of anti-tumor drug screening cell chip based on 3D cell printing technique[J]. Chinese Journal of Biomedical Engineering, 2014, 33(2): 161-169.
|
| 17 |
张伟.面向软体机器人的软材料嵌入式3D打印基础研究[D].苏州:苏州大学,2021.
ZHANG W. Experimental research on embedded 3D printing technology with soft materials for soft robotics[D]. Suzhou: Soochow University, 2021.
|
| 18 |
王润秋.模拟生物软组织应变硬化特性的超材料结构设计与3D打印方法研究[D].杭州:浙江大学,2020.
WANG R Q. Research on metamaterial structure design and 3D printing method for simulating strain-stiffening property of biological soft tissue[D]. Hangzhou: Zhejiang University, 2020.
|
| 19 |
蔡自兴.机器人学[M].2版.北京:清华大学出版社,2009:1-30.
CAI Z X. Robotics[M]. 2nd ed. Beijing: Tsinghua University Press, 2009: 1-30.
|
| 20 |
黄真,赵永生,赵铁石.高等空间机构学[M].2版.北京:高等教育出版社,2014:159-184.
HUANG Z, ZHAO Y S, ZHAO T S. Advanced spatial mechanism[M]. 2nd ed. Beijing: Higher Education Press, 2014: 159-184.
|
| 21 |
WANG Y J, FANG C, JIANG Q M. Singularity-free workspace of parallel robots[J]. Advances in Robotics & Automation, 2015, 4(2): 1000122.
|
| 22 |
吴生富,王洪波,黄真.并联机器人工作空间的研究[J].机器人,1991,13(3):33-39.
WU S F, WANG H B, HUANG Z. Study of workspace in parallel robot manipulator[J]. Robot, 1991, 13(3): 33-39.
|
| 23 |
KUMAR V. Characterization of workspaces of parallel manipulators[J]. Journal of Mechanical Design, 1992, 114(3): 368-375.
|
| 24 |
魏修亭,李刚,杜强,等.6-PTRT型齿顶倒角机器人运动学及工作空间分析[J].中国机械工程,2013,24(6):750-754.
WEI X T, LI G, DU Q, et al. Kinematic analysis and workspace calculation of a 6-PTRT manipulator for chamfering gear addendum[J]. China Mechanical Engineering, 2013, 24(6): 750-754
|
| 25 |
于晖,孙立宁,刘品宽,等.新型 6-HTRT 并联机器人工作空间和参数研究[J].机器人,2002,24(4):293-298,313.
YU H, SUN L N, LIU P K, et al. Study on the workspace and parameter of novel 6-HTRT parallel robot[J]. Robot, 2002, 24(4): 293-298, 313.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|