| 【特约专栏】“2024’工程机械行业科技节”成果展示——创新技术及其应用 |
|


|
|
|
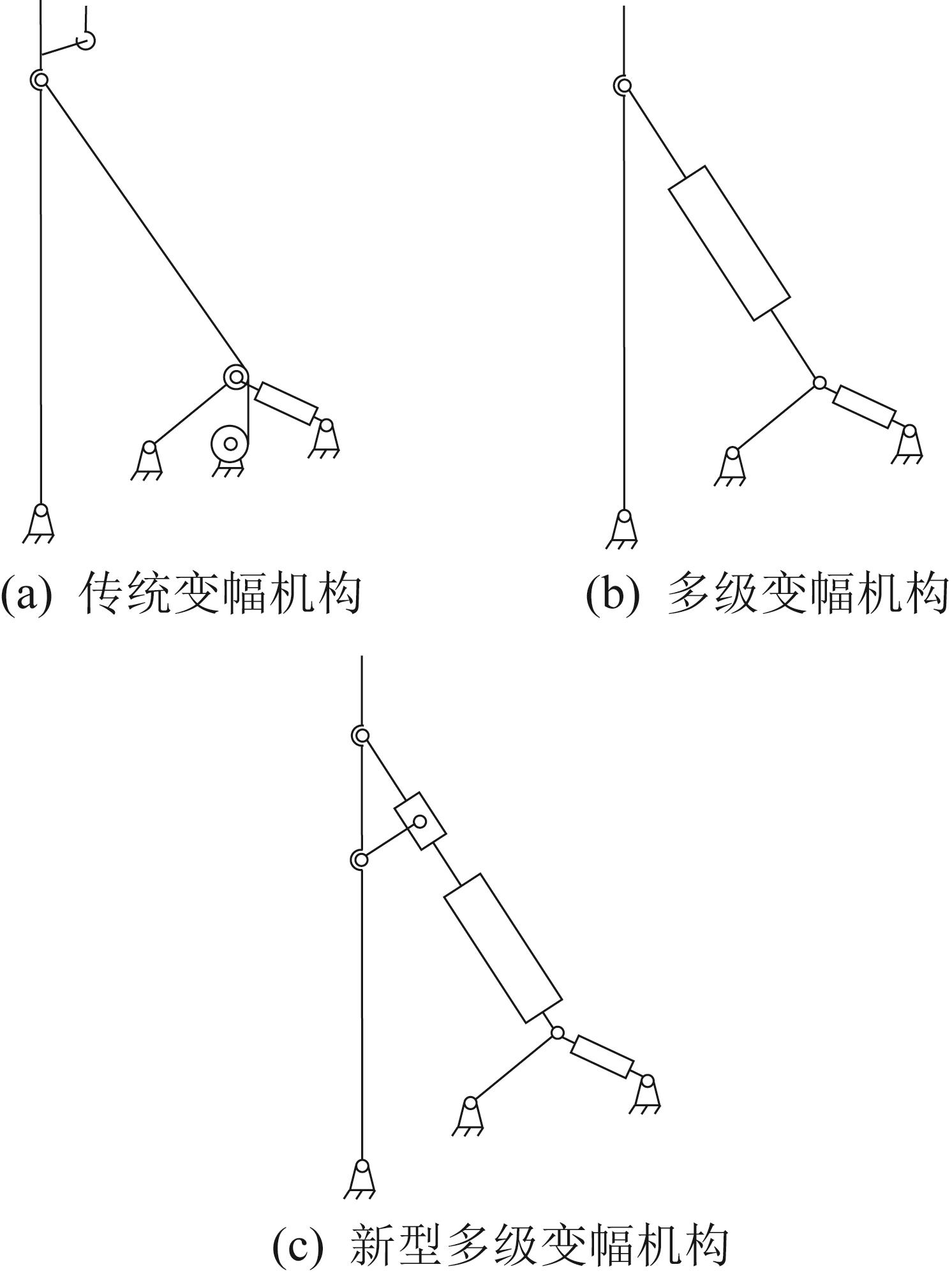
| 新型桩架多级变幅机构运动学分析 |
邓华成1( ),康辉梅1(),朱振新2,3,唐溪林1 ),康辉梅1(),朱振新2,3,唐溪林1 |
1.湖南师范大学 工程与设计学院,湖南 长沙 410081
2.山河智能装备股份有限公司 国家级企业技术中心,湖南 长沙 410100
3.地下工程装备湖南省工程研究中心,湖南 长沙 410100 |
|
| Kinematics analysis of novel multi-stage luffing mechanism of piling rig |
| Huacheng DENG1(),Huimei KANG1(),Zhenxin ZHU2,3,Xilin TANG1 |
1.College of Engineering and Design, Hunan Normal University, Changsha 410081, China
2.National Enterprise Technology Center, Sunward Intelligent Equipment Co. , Ltd. , Changsha 410100, China
3.Hunan Provincial Engineering Research Center for Underground Engineering Equipment, Changsha 410100, China |
引用本文:
邓华成,康辉梅,朱振新,唐溪林. 新型桩架多级变幅机构运动学分析[J]. 工程设计学报, 2024, 31(6): 784-792.
Huacheng DENG,Huimei KANG,Zhenxin ZHU,Xilin TANG. Kinematics analysis of novel multi-stage luffing mechanism of piling rig[J]. Chinese Journal of Engineering Design, 2024, 31(6): 784-792.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.14.06
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I6/784
|
| 1 |
刘古岷, 王渝, 胡国庆, 等. 桩工机械[M]. 北京: 机械工业出版社, 2001.
LIU G M, WANG Y, HU G Q, et al. Piling machinery[M]. Beijing: China Machine Press, 2001.
|
| 2 |
陶宁. 桩架立柱结构优化设计[D]. 长沙: 湖南师范大学, 2021.
TAO N. Structural optimization design of the mast of pile frame[D]. Changsha: Hunan Normal University, 2021.
|
| 3 |
徐建,郭传新.全液压履带式桩架的研发与应用[C]//中国建筑学会地基基础学术大会论文集(2022). 北京:中国建筑出版传媒有限公司,2023. doi:10.52202/070275-0129
XU J, GUO C X. Development and application of hydraulic crawler piling rig[C]//Proceedings of the Chinese Society of Architecture Foundation Academic Conference (2022). Beijing:China Architecture Publishing Media Co., Ltd., 2023.
doi: 10.52202/070275-0129
|
| 4 |
张希恒, 赵永刚, 陈建业. 步履式打桩架立柱受力分析计算[J]. 甘肃科技, 2004, 20(5): 96-97.
ZHANG X H, ZHAO Y G, CHEN J Y. Analysis and calculation of the force on the column of the walking piling rig[J]. Gansu Science and Technology, 2004, 20(5): 96-97.
|
| 5 |
张希恒, 陈建业, 赵永刚. 步履式打桩架立柱稳定性分析[J]. 甘肃科学学报, 2004, 16(4): 99-101.
ZHANG X H, CHEN J Y, ZHAO Y G. Stability analysis of the leader of the walking pile frame[J]. Journal of Gansu Sciences, 2004, 16(4): 99-101.
|
| 6 |
曾礼平. 基于CAE技术的打桩机桩架结构分析及优化设计[D]. 南京: 南京航空航天大学, 2012.
ZENG L P. Structural analysis and optimal design of pile driver frame based on CAE technology[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012.
|
| 7 |
刘振东, 赵文欣, 赵伟民. 桩架的起架油缸铰座的分析计算[J]. 科学技术与工程, 2012, 12(12): 2942-2946. doi:10.3969/j.issn.1671-1815.2012.12.039
LIU Z D, ZHAO W X, ZHAO W M. The analysis and calculation of the oil cylinder in raising pillar hinged shaft pedestal of pile frame[J]. Science Technology and Engineering, 2012, 12(12): 2942-2946.
doi: 10.3969/j.issn.1671-1815.2012.12.039
|
| 8 |
安治鹏. 某履带式桩架稳定性研究及部分结构仿真分析[D]. 北京: 北京林业大学, 2017.
AN Z P. Study on integral stability and part of the crawler pile frame simulation analysis[D]. Beijing: Beijing Forestry University, 2017.
|
| 9 |
钱奂云, 邓超, 刘进学, 等. 大型全液压履带桩架的技术创新与产品开发(续)[J]. 建筑机械, 2017(9): 17-21.
QIAN H Y, DENG C, LIU J X, et al. Technical innovation and product development of large-scale fully hydraulic crawler piling rig (continued)[J]. Construction Machinery, 2017(9): 17-21.
|
| 10 |
顾林坤, 郭勇, 钱奂云, 等. 大型桩架多缸立桅机构设计与分析[J]. 机械设计, 2017, 34(4): 7-11.
GU L K, GUO Y, QIAN H Y, et al. Design and analysis of multiple hydraulic cylinder mast erecting mechanism for large pile frame[J]. Journal of Machine Design, 2017, 34(4): 7-11.
|
| 11 |
曹博, 朱建新, 朱振新. 桩架新型变幅机构的动力学分析[J]. 机械科学与技术, 2020, 39(4): 501-507.
CAO B, ZHU J X, ZHU Z X. Dynamic analysis of new variable amplitude mechanism of pile frame[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(4): 501-507.
|
| 12 |
朱振新, 朱建新, 唐博豪, 等. 多级组合型大角度变幅机构的动力学特性[J]. 中南大学学报(自然科学版), 2019, 50(6): 1334-1342.
ZHU Z X, ZHU J X, TANG B H, et al. Dynamics characteristics of multi-stage combined type large angle luffing mechanism[J]. Journal of Central South University (Science and Technology), 2019, 50(6): 1334-1342.
|
| 13 |
ZHU Z X, ZHU J X, KANG H M, et al. Dynamic modeling of a series multi closed chain two degree of freedom variable amplitude mechanism[J]. Journal of Central South University, 2021, 28(1): 168-178.
|
| 14 |
康辉梅, 朱建新, 王石林. 混合链式液压调平机构的动力学特性[J]. 中南大学学报(自然科学版), 2019, 50(3): 557-563.
KANG H M, ZHU J X, WANG S L. Dynamic characteristic of hydraulic leveling mechanism with a hybrid kinematic chain[J]. Journal of Central South University (Science and Technology), 2019, 50(3): 557-563.
|
| 15 |
康辉梅, 许怡赦, 金耀. 伸缩臂叉装车工作装置运动学分析[J]. 机械设计, 2015, 32(5): 39-42.
KANG H M, XU Y S, JIN Y. Kinematic analysis for working device of telehandler[J]. Journal of Machine Design, 2015, 32(5): 39-42.
|
| 16 |
陈明方, 黄良恩, 张永霞, 等. 3-PUU并联机构的运动学分析与验证[J]. 工程设计学报, 2023, 30(6): 763-778. doi:10.3785/j.issn.1006-754X.2024.03.157
CHEN M F, HUANG L G, ZHANG Y X, et al. Kinematics analysis and validation of 3-PUU parallel mechanism[J]. Chinese Journal of Engineering Design, 2023, 30(6): 763-778.
doi: 10.3785/j.issn.1006-754X.2024.03.157
|
| 17 |
赵万博, 陈赛旋, 姜官武, 等. 新型线驱动式微创手术器械结构设计与运动学分析[J]. 工程设计学报, 2023, 30(6): 657-666. doi:10.3785/j.issn.1006-754X.2023.03.131
ZHAO W B, CHEN S X, JIANG G W, et al. Structural design and kinematics analysis of new cable-driven minimally invasive surgical instrument[J]. Chinese Journal of Engineering Design, 2023, 30(6): 657-666.
doi: 10.3785/j.issn.1006-754X.2023.03.131
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|