桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工。在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响。因此,许多学者对桩架的受力和稳定性进行了研究。如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性。以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性。
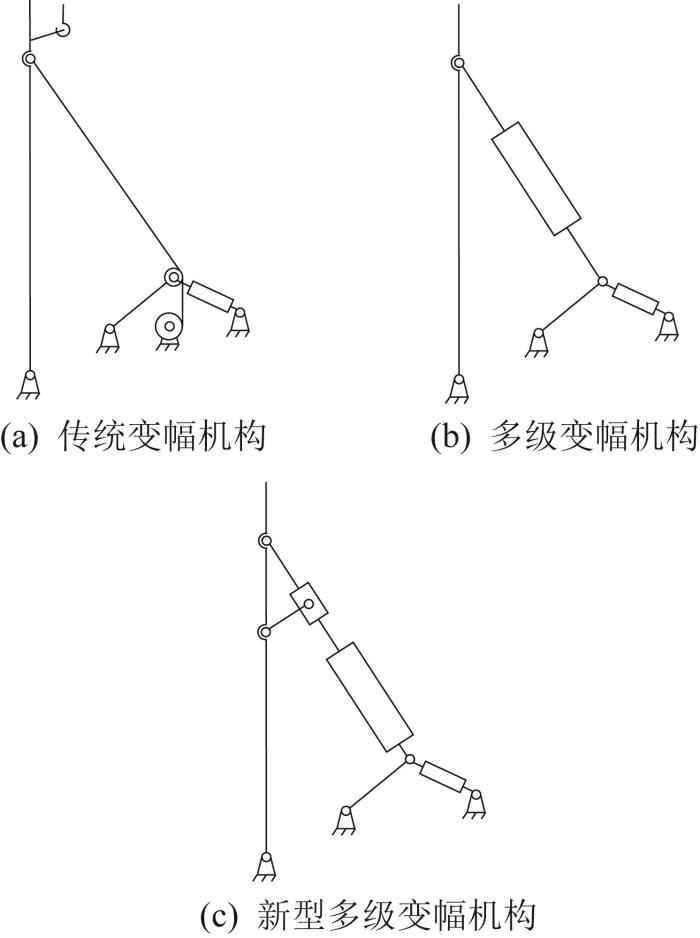
变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响。传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业。因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论。以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距。同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩。为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗。
为了实现桩架自主变幅,改善桩架在施工时的受力情况,提高桩架变幅机构的支撑稳定性,本文提出了一种新型桩架多级变幅机构。首先,建立了该机构的运动学模型,得到运动学解析解,以研究机构在变幅过程中的运动学特性[14 -17 ] 和运动可行性;其次,设置变幅条件,进行机构参数设计,并利用 MATLAB软件进行分析和计算,以确定前、后液压缸收缩动作的衔接方式和机构参数对变幅运动可行性的影响;最后,利用ADAMS软件仿真得到该机构的速度、加速度、位置等曲线,来验证运动学模型的正确性。
1 新型桩架多级变幅机构的组成及工作原理
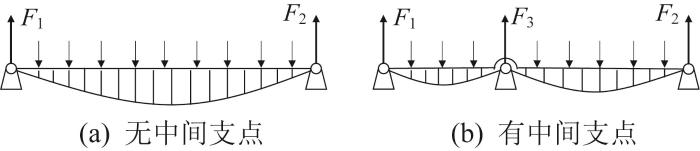
桩架变幅机构如图1 所示。桩架多级变幅机构以前、后液压缸的收缩动作来代替传统变幅机构吊机和卷扬机的动作,无需外力辅助便可自主变幅。新型多级变幅机构在多级变幅机构的立柱和前液压缸之间添加了连杆和滑块,在前液压缸两端铰点之间增加了一个支点,减小了跨距的长度,从而显著减小前液压缸的弯矩,提高了桩架的稳定性。构件的弯矩如图2 所示。
图1
图1
桩架变幅机构示意图
Fig.1
Schematic diagram of luffing mechanism of piling rig
图2
图2
构件弯矩示意图
Fig.2
Schematic diagram of bending moment of component
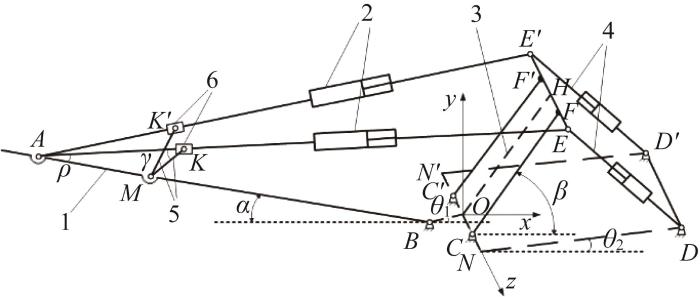
新型桩架多级变幅机构呈左右两侧对称分布,其运动简图如图3 所示。机构主要由立柱、前液压缸、变幅架、后液压缸、连杆和滑块等组成,其中主动件分别为前液压缸和后液压缸。机架后侧分别铰接2个后液压缸筒于D D ' E E ' B A E E ' M K K '
图3
图3
新型桩架多级变幅机构运动简图
1—立柱;2—前液压缸;3—变幅架;4—后液压缸;5—连杆;6—滑块。
Fig.3
Motion diagram of novel multi-stage luffing mechanism of piling rig
整个变幅过程分2步完成。第1步,后液压缸静止不动,通过2个前液压缸的同步收缩带动立柱绕铰点B M
2 新型桩架多级变幅机构运动学模型的建立
如图3 所示,以C C ' O x O y O C z O -xyz 。定义点A 、B 之间的长度lAB =l 1 ,lCF =l 2 ,lMK =l 3 ,lOB =a 1 ,lND =a 2 ,lON = lHE =a 3 ,lAM =a 4 ;前液压缸长度lAE =d 1 ,后液压缸长度lDE = d 2 ;滑块到铰点A s α β ρ γ d 1 d 2 α β ρ s γ
2.1 位置正解
求位置正解是通过已知的前、后液压缸长度d 1 d 2 α β ρ s γ
x A y A z A = - a 1 c o s θ 1 - l 1 c o s α - a 1 s i n θ 1 + l 1 s i n α 0 x B y B z B = - a 1 c o s θ 1 - a 1 s i n θ 1 0
x D y D z D = a 2 c o s θ 2 a 2 s i n θ 2 a 3 x E y E z E = l 2 c o s β l 2 s i n β a 3
x H y H z H = l 2 c o s β l 2 s i n β 0
β = θ 2 + a r c c o s l 2 2 + a 2 2 - d 2 2 2 l 2 a 2 (1)
l B H = l 2 c o s β + a 1 c o s θ 1 2 + l 2 s i n β + a 1 s i n θ 1 2 1 2 (2)
l B E = l B H 2 + a 3 2 1 2 (3)
∠ A B H = a r c c o s l 1 2 + l B H 2 - d 1 2 + a 3 2 2 l 1 l B H (4)
∠ H B O = a r c c o s a 1 2 + l B H 2 - l 2 2 2 a 1 l B H (5)
α = π - θ 1 - ∠ A B H - ∠ H B O (6)
ρ = a r c c o s l 1 2 + d 1 2 - l B E 2 2 l 1 d 1 (7)
s = a 4 c o s ρ + l 3 2 - a 4 2 s i n 2 ρ (8)
γ = a r c s i n a 4 s i n ρ l 3 (9)
2.2 位置反解
求位置反解是根据输出量α β d 1 d 2
d 1 = ( l 2 c o s β + a 1 c o s θ 1 + l 1 c o s α ) 2 + ( l 2 s i n β + a 1 s i n θ 1 - l 1 s i n α ) 2 + a 3 2 1 2 (10)
d 2 = ( l 2 c o s β - a 2 c o s θ 2 ) 2 + ( l 2 s i n β - a 2 s i n θ 2 ) 2 1 2 (11)
2.3 速度雅可比矩阵
速度雅可比矩阵描述了输出与输入速度之间的映射关系,可表示为:
p ˙ = J q ˙ (12)
式中: J 5 × 2 p ˙ = α ˙ β ˙ ρ ˙ γ ˙ s ˙ T q ˙ = d ˙ 1 d ˙ 2 T
α ˙ = p 1 d ˙ 1 + p 2 β ˙ (13)
式中: p 1 = g 1 g 2 p 2 = g 3 g 2 g 1 = d 1
g 2 = - l 1 l 2 s i n ( α + β ) - a 1 l 1 s i n ( α + θ 1 )
g 3 = l 1 l 2 s i n ( α + β ) + a 1 l 2 s i n ( β - θ 1 )
β ˙ = p 3 d ˙ 2 (14)
式中:p 3 = g 4 g 5 g 4 = d 2 g 5 = a 2 l 2 s i n ( β - θ 2 )
ρ ˙ = p 4 α ˙ + p 5 β ˙ + p 6 d ˙ 1 (15)
式中:p 4 = g 7 g 6 p 5 = g 8 g 6 p 6 = g 9 g 6 g 6 = l 1 d 1 s i n ρ
g 7 = l 1 l 2 s i n ( α + β ) + a 1 l 1 s i n ( α + θ 1 )
g 8 = l 1 l 2 s i n ( α + β ) g 9 = l 1 c o s ρ
s ˙ = p 7 ρ ˙ (16)
式中:p 7 = g 11 g 10 g 10 = a 4 c o s ρ - s g 11 = a 4 s s i n ρ
γ ˙ = p 8 ρ ˙ (17)
式中:p 8 = g 13 g 12 g 12 = l 3 c o s γ g 13 = a 4 c o s ρ
由式(13)至式(17)可知,β ˙ d ˙ 2 α ˙ d ˙ 1 β ˙ ρ ˙ α ˙ β ˙ d ˙ 1 s ˙ γ ˙ ρ ˙ α ˙ β ˙ ρ ˙ s ˙ γ ˙ d ˙ 1 d ˙ 2 d ˙ 1 d ˙ 2 α ˙ β ˙ ρ ˙ s ˙ γ ˙ 式(12),可解得雅可比矩阵方程为:
α ˙ β ˙ ρ ˙ s ˙ γ ˙ = J d ˙ 1 d ˙ 2 = j 11 j 12 j 21 j 22 j 31 j 32 j 41 j 42 j 51 j 52 d ˙ 1 d ˙ 2 (18)
式中:j 11 = p 1 j 12 = p 2 p 3 j 21 = 0 j 22 = p 3
j 31 = p 1 p 4 + p 6 j 32 = p 3 p 5 + p 2 p 3 p 4
j 41 = p 6 p 7 + p 1 p 4 p 7 j 42 = p 3 p 5 p 7 + p 2 p 3 p 4 p 7
j 51 = p 6 p 8 + p 1 p 4 p 8 j 52 = p 3 p 5 p 8 + p 2 p 3 p 4 p 8
2.4 加速度海森矩阵
加速度海森矩阵描述了输出与输入加速度之间的映射关系,可表示为:
p ¨ = J q ¨ + q ˙ T * H q ˙ (19)
式中:H 2 × 2 × 2 p ¨ = α ¨ β ¨ ρ ¨ s ¨ γ ¨ T q ¨ = d ¨ 1 d ¨ 2 T
J ˙ = q ˙ T * H (20)
j ˙ 11 j ˙ 12 j ˙ 21 j ˙ 22 j ˙ 31 j ˙ 32 j ˙ 41 j ˙ 42 j ˙ 51 j ˙ 52 = p ˙ 1 p ˙ 2 p 3 + p 2 p ˙ 3 0 p ˙ 3 p ˙ 6 + p ˙ 1 p 4 + p 1 p ˙ 4 p ˙ 3 p 5 + p 3 p ˙ 5 + p ˙ 2 p 3 p 4 + p 2 p ˙ 3 p 4 + p 2 p 3 p ˙ 4 j ˙ 31 p 7 + j 31 p ˙ 7 j ˙ 32 p 7 + j 32 p ˙ 7 j ˙ 31 p 8 + j 31 p ˙ 8 j ˙ 32 p 8 + j 32 p ˙ 8 (21)
式中:p ˙ i ( i = 1 , 2 , ⋯ , 8 ) p i
p ˙ i = f 2 i - 1 d ˙ 1 + f 2 i d ˙ 2 (22)
f 2 = - ( k 2 j 22 + k 1 j 12 ) g 1 g 2 2
f 3 = - k 1 g 3 j 11 + k 3 g 2 j 11 g 2 2
f 4 = ( k 3 g 2 - k 1 g 3 ) j 12 + ( k 4 g 2 - k 2 g 3 ) j 22 g 2 2
f 5 = 0 f 6 = g 5 - k 5 g 4 j 22 g 5 2
f 7 = k 6 g 6 j 11 - k 7 g 7 j 31 - k 8 g 7 g 6 2
f 8 = k 6 g 6 j 12 + k 3 g 6 j 22 - k 7 g 7 j 32 g 6 2
f 9 = k 3 g 6 j 11 - k 7 g 8 j 31 - k 8 g 8 g 6 2
f 10 = k 3 g 6 ( j 12 + j 22 ) - k 7 g 8 j 32 g 6 2
f 11 = k 9 g 6 j 31 - k 7 g 9 j 31 - k 8 g 9 g 6 2
f 12 = ( k 9 g 6 - k 9 g 9 ) j 32 g 6 2
f 13 = g 10 ( k 11 j 31 - k 10 j 41 ) - g 11 ( k 10 j 31 - j 41 ) g 10 2
f 14 = g 10 ( k 11 j 32 - k 10 j 42 ) - g 11 ( k 10 j 32 - j 42 ) g 10 2
f 15 = k 10 g 12 j 31 - k 12 g 13 j 51 g 12 2
f 16 = k 10 g 12 j 32 - k 12 g 13 j 52 g 12 2
k 1 = - l 1 l 2 c o s ( α + β ) - a 1 l 1 c o s ( α + θ 1 )
k 2 = - l 1 l 2 c o s ( α + β ) k 3 = l 1 l 2 c o s ( α + β )
k 4 = l 1 l 2 c o s ( α + β ) + a 1 l 2 c o s ( β - θ 1 )
k 5 = a 2 l 2 c o s ( β - θ 2 )
k 6 = l 1 l 2 c o s ( α + β ) + a 1 l 1 c o s ( α + θ 1 )
k 7 = l 1 d 1 c o s ρ k 8 = l 1 s i n ρ
k 9 = - l 1 s i n ρ k 10 = - a 4 s i n ρ
k 11 = a 4 s c o s ρ k 12 = - l 3 s i n γ
将式(22)代入式(21)得到J ˙ J ˙ 式(20)得到 H H 式(19)得到海森矩阵方程,为:
α ¨ β ¨ ρ ¨ s ¨ γ ¨ = j 11 j 12 j 21 j 22 j 31 j 32 j 41 j 42 j 51 j 52 d ¨ 1 d ¨ 2 + d ˙ 1 d ˙ 2 * h 111 h 112 h 121 h 122 h 211 h 212 h 221 h 222 h 311 h 312 h 321 h 322 h 411 h 412 h 421 h 422 h 511 h 512 h 521 h 522 d ˙ 1 d ˙ 2 (23)
式中:h 111 = f 1 h 112 = f 2 h 121 = p 3 f 3 h 122 = p 3 f 4 + p 2 f 5
h 211 = 0 h 212 = 0 h 221 = f 5 h 222 = f 6
h 311 = f 11 + p 4 f 1 + p 1 f 7 h 312 = f 12 + p 4 f 2 + p 1 f 8
h 321 = p 3 f 9 + p 3 p 4 f 3 + p 2 p 3 f 7
h 322 = p 5 f 6 + p 3 f 10 + p 3 p 4 f 4 + p 2 p 4 f 6 + p 2 p 3 f 8
h 411 = p 7 h 311 + f 13 j 31 h 412 = p 7 h 312 + f 14 j 31
h 421 = p 7 h 321 + f 13 j 32 h 422 = p 7 h 322 + f 14 j 32
h 511 = p 8 h 311 + f 15 j 31 h 512 = p 8 h 312 + f 16 j 31
h 521 = p 8 h 321 + f 15 j 32 h 522 = p 8 h 322 + f 16 j 32
3 工程案例分析
3.1 变幅条件分析
条件1:为了保证变幅运动流畅,滑块的上移需持续,即滑块到A s s
当前液压缸收缩时,d 1 lBE 不变,由式(7)可知,ρ ∠ A E B ≤ 90 ° ρ ∠ A E B > 90 ° ρ 式(8)可知,ρ s s
∠ A E B ≤ 90 ° (24)
当后液压缸收缩时,β 式(2)可知,lBH 先增后减。当β ≥ θ 1 lBH 递增;当β < θ 1 lBH 递减。由式(3)可知,lBH 增大,则l B E 式(7)可知,l B E ρ 式(8)可知,ρ s s
β ≥ θ 1 (25)
条件2:2次变幅完成后,立柱从水平转成竖直,则在整个变幅过程中立柱最大可转动角度α m a x
α m a x ≥ 90 ° (26)
当立柱转动了α m a x 式(24)可知,∠ A E B = 90 ° d 1 ' 式(25)知,β = θ 1 ∠ H B O = 0 d 1 ' 式(4)得到∠ A B H ∠ A B H 式(6),即可得立柱的最大可转动角度α m a x
条件3:当立柱竖直时,连杆应与前液压缸垂直,即立柱竖直时连杆与前液压缸的夹角γ '
γ ' = 90 ° (27)
条件4:在前液压缸收缩停止和后液压缸收缩开始的衔接过程中,前、后液压缸的载荷波动较小,即衔接时多级变幅机构的加速度较小。
3.2 机构参数设定
根据工程实际要求,新型桩架多级变幅机构的参数如表1 所示。表中:α 0 为立柱与水平方向的初始夹角,β 0 为变幅架与水平方向的初始夹角。
设定前、后液压缸匀速运动的速度分别为v 1 = 46.8 m m / s v 2 = 42.6 m m / s
d 1 = d 01 - 2 3 v 1 t 1 3 , 0 < t 1 ≤ 0.5 s d 01 + 2 3 v 1 ( t 1 - 1 ) 3 - v 1 t 1 + v 1 2 , 0.5 < t 1 ≤ 1 s d 01 - v 1 t 1 + v 1 2 , 1 < t 1 ≤ 72 s d 01 + 2 3 v 1 ( t 1 - 72 ) 3 - v 1 t 1 + v 1 2 , 72 < t 1 ≤ 72.5 s d 01 - 2 3 v 1 ( t 1 - 73 ) 3 - 72 v 1 , 72.5 < t 1 ≤ 73 s (28)
d 2 = d 02 - 2 3 v 2 t 2 3 , 0 < t 2 ≤ 0.5 s d 02 + 2 3 v 2 ( t 2 - 1 ) 3 - v 2 t 2 + v 2 2 , 0.5 < t 2 ≤ 1 s d 02 - v 2 t 2 + v 2 2 , 1 < t 2 ≤ 53 s d 02 + 2 3 v 2 ( t 2 - 53 ) 3 - v 2 t 2 + v 2 2 , 53 < t 2 ≤ 53.5 s d 02 - 2 3 v 2 ( t 2 - 54 ) 3 - 53 v 2 , 53.5 < t 2 ≤ 54 s (29)
式中:d 01 d 02 t 1 t 2
3.3 MATLAB 仿真分析
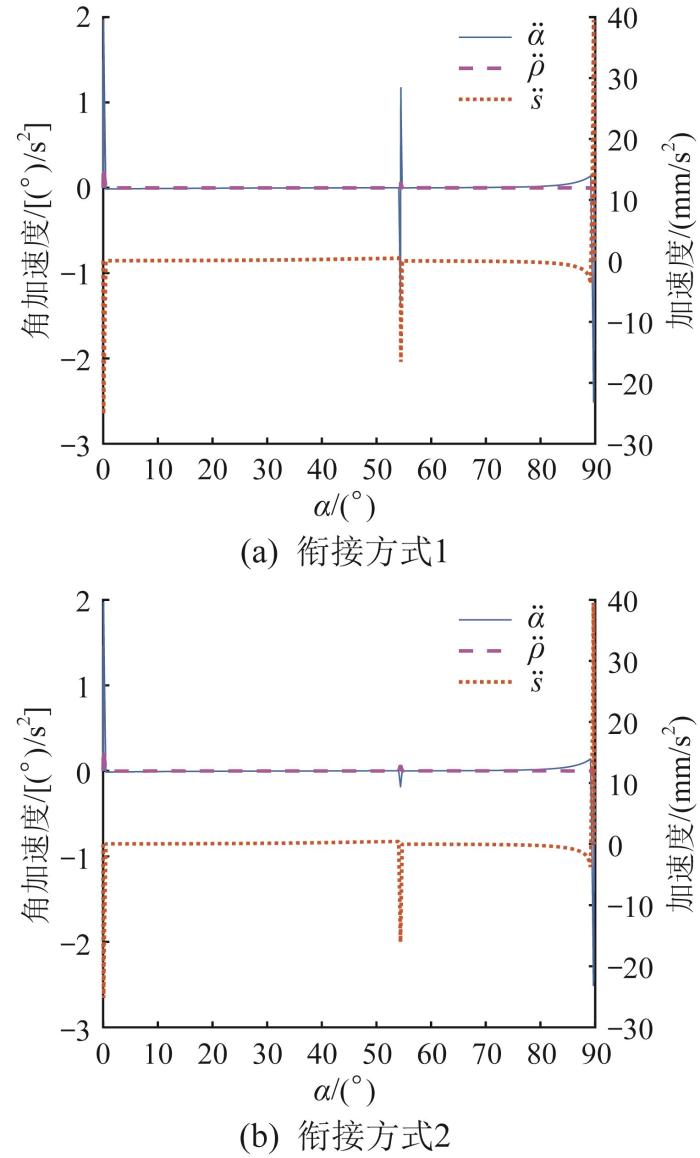
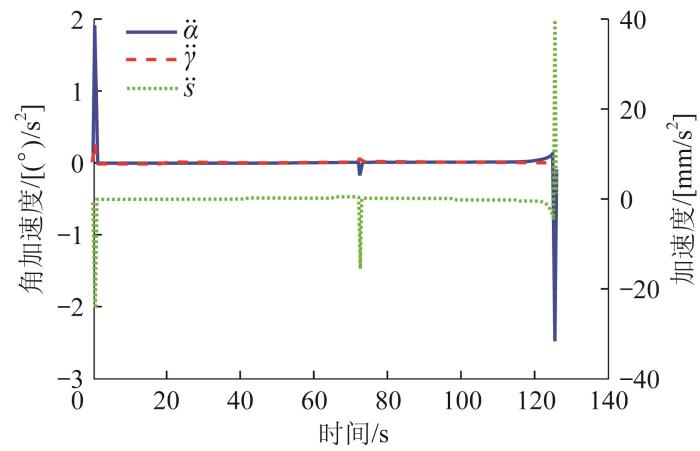
多级变幅机构前、后液压缸的动作衔接方式有2种,前液压缸收缩停止后再进行后液压缸收缩为衔接方式1,在前液压缸减速收缩的过程中进行后液压缸加速收缩为衔接方式2。基于上述多级变幅机构的运动学方程和液压缸位移函数进行MATLAB编程计算,可得多级变幅机构的加速度和角加速度曲线,如图4 所示。
图4
图4
多级变幅机构加速度和角加速度曲线
Fig.4
Acceleration and angular acceleration curves of multi-stage luffing mechanism
由图可知:α ¨ ρ ¨ s ¨ α 0 54 ° 90 ° α 54 ° 式1下α ¨ 式2,这是因为此时在衔接方式2下同时进行前液压缸停止和后液压缸启动,2种运动的突变部分抵消,所以在衔接方式1下立柱的角加速度较大;前液压缸的角加速度由α ¨ ρ ¨ ρ ¨ α ¨ 式1下前液压缸的角加速度较大;当α = 54 ° 式1下s ¨ 式2,表明衔接方式2下滑块的加速度较小,但衔接方式对滑块加速度的影响较小。多级变幅机构变幅时负载为其本身的质量,其主要集中在立柱及其搭载的工作装置和前液压缸上,衔接方式2下立柱和前液压缸的角加速度以及滑块的加速度更小,所以机构的惯性力更小。因此,为了保证变幅过程中前、后液压缸的衔接更加平稳,宜采用衔接方式2。
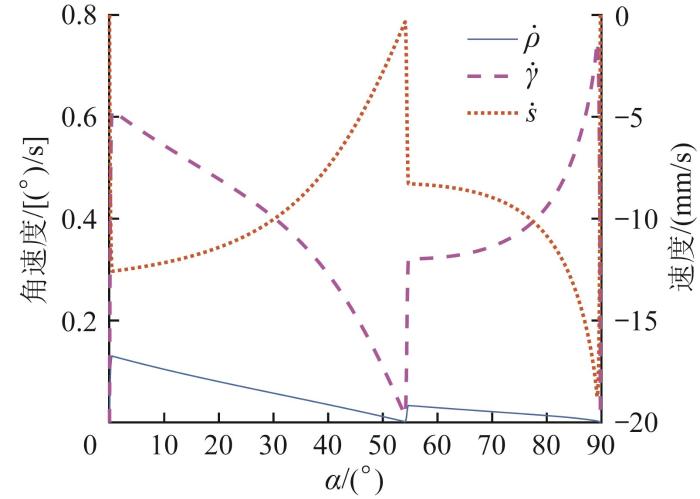
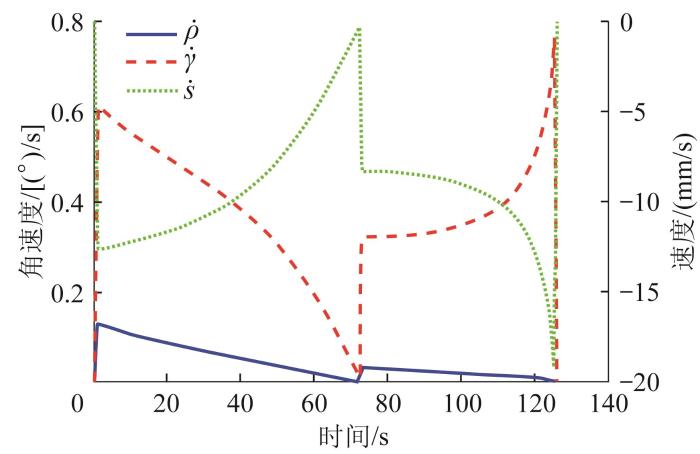
衔接方式2下多级变幅机构的速度和角速度曲线如图5 所示。由图可知:当0 ≤ α < 54 ° ρ ˙ γ ˙ s ˙ 54 ° < α ≤ 90 ° ρ ˙ γ ˙ s ˙ ρ ˙ γ ˙ s ˙ ρ γ s M
图5
图5
衔接方式2 下多级变幅机构速度和角速度曲线
Fig.5
Velocity and angular velocity curves of multi-stage luffing mechanism under connection mode 2
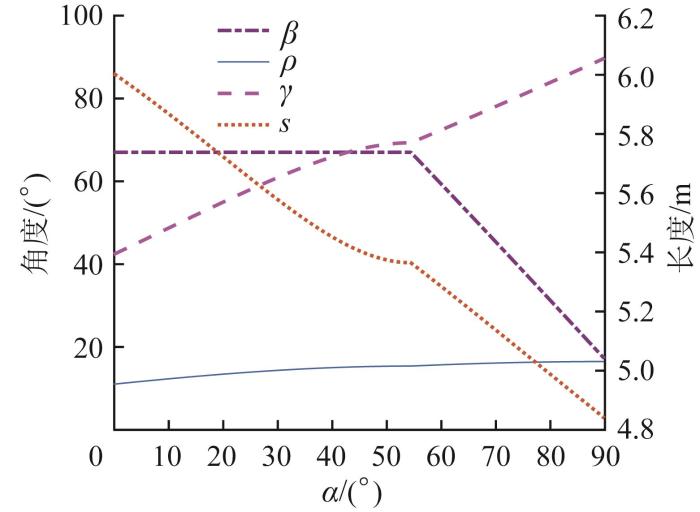
衔接方式2下变幅机构的位置曲线如图6 所示。由图可知,当α = 90 ° γ = 90 ° γ = 90 ° M M
图6
图6
衔接方式2 下多级变幅机构的位置曲线
Fig.6
Position curves of multi-stage luffing mechanism under connection mode 2
3.4 机构参数对α m a x
α m a x α m a x B x B y B β 0 l 1 l 2 a 3 x B y B β 0 l 1 l 2 a 3 α m a x
以B (-1.225 m, -0.36 m),β = 67 ° l 1 = 16.8 m l 2 = 3.054 m a 3 = 2 m α m a x 图7 所示。
图7
图7
多级变幅机构参数对α m a x
Fig.7
Influence of parameters of multi-stage luffing mechanism on α m a x
由图7 可知,在一定范围内,α m a x x B y B β 0 l 1 l 2 a 3 式(26)可知,α m a x 90 ° y B l 2 a 3 x B β 0 l 1
4 新型桩架多级变幅机构变幅仿真
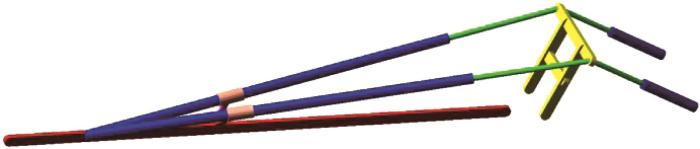
在ADAMS软件中以大地为机架建立多级变幅机构仿真模型,如图8 所示。添加约束如下:立柱、变幅架、后液压缸筒与大地之间均添加转动副;液压缸活塞杆与液压缸筒之间、滑块与前液压缸筒之间均添加移动副;除前液压缸筒与变幅架的铰点处添加转动副外,其余铰点处均添加球面副。完成后模型共有7个转动副、6个移动副和8个球面副。
图8
图8
多级变幅机构ADAMS 仿真模型
Fig.8
ADAMS simulation model of multi-stage luffing mechanism
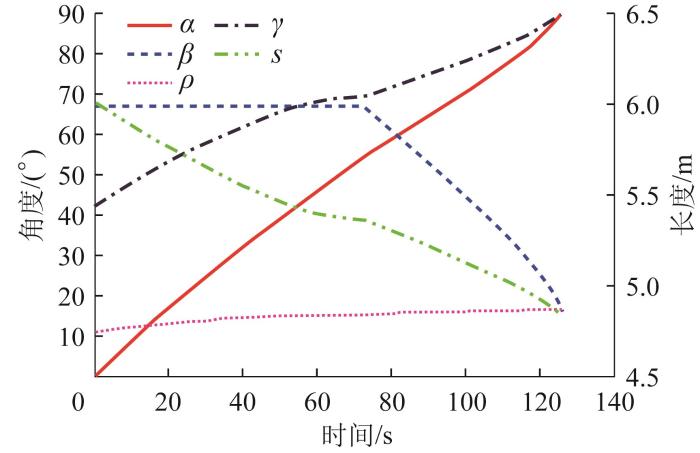
以前、后液压缸为原动件,对液压缸活塞杆和液压缸筒之间的移动副添加位移驱动函数。分别对衔接方式2下的d 1 d 2 图9 至图11 所示。
图9
图9
多级变幅机构位置仿真曲线
Fig.9
Position simulation curves of multi-stage luffing mechanism
图10
图10
多级变幅机构速度和角速度仿真曲线
Fig.10
Velocity and angular velocity simulation curves of multi-stage luffing mechanism
图11
图11
多级变幅机构加速度和角加速度仿真曲线
Fig.11
Acceleration and angular acceleration simulation curves of multi-stage luffing mechanism
分别对比图4 与图11 、图5 与图10 、图6 与图9 可知,衔接方式2下机构变幅运动的仿真结果与理论分析结果一致,验证了本文提出的运动学模型的正确性和有效性。
5 结 论
为了实现桩架在自主变幅的同时提高支撑稳定性,本文提出了一种新型桩架多级变幅机构,并对该机构进行了运动学分析。论文重点如下:
1)分析了新型桩架多级变幅机构的变幅条件,论证了该机构可以顺畅地将立柱从水平变幅至竖直。
2)分析了多级变幅机构的参数对变幅运动的影响,结果表明,y B l 2 a 3 x B β 0 l 1
3)分析了多级变幅机构前、后液压缸的动作衔接方式,结果表明,在前液压缸减速收缩的过程中进行后液压缸加速收缩有利于机构变幅的平稳运行。
4)利用ADAMS软件搭建了多级变幅机构仿真模型,仿真结果验证了所构建的运动学模型的正确性和有效性。
5)后续可以所建立的机构运动学模型为基础,对机构的动力学特性作进一步分析,进行机构的优化和控制。
参考文献
View Option
[1]
刘古岷 , 王渝 , 胡国庆 , 等 桩工机械 [M]. 北京 : 机械工业出版社 , 2001 .
[本文引用: 1]
LIU G M WANG Y HU G Q et al Piling machinery [M]. Beijing : China Machine Press , 2001 .
[本文引用: 1]
[2]
陶宁 桩架立柱结构优化设计
[D]. 长沙 : 湖南师范大学 , 2021 .
TAO N Structural optimization design of the mast of pile frame
[D]. Changsha : Hunan Normal University , 2021 .
[3]
[本文引用: 1]
XU J GUO C X Development and application of hydraulic crawler piling rig
[C]//Proceedings of the Chinese Society of Architecture Foundation Academic Conference (2022) . Beijing :China Architecture Publishing Media Co., Ltd. , 2023 .
DOI:10.52202/070275-0129
[本文引用: 1]
[4]
张希恒 , 赵永刚 , 陈建业 步履式打桩架立柱受力分析计算
[J]. 甘肃科技 , 2004 , 20 (5 ): 96 -97 .
[本文引用: 1]
ZHANG X H ZHAO Y G CHEN J Y Analysis and calculation of the force on the column of the walking piling rig
[J]. Gansu Science and Technology , 2004 , 20 (5 ): 96 -97 .
[本文引用: 1]
[5]
张希恒 , 陈建业 , 赵永刚 步履式打桩架立柱稳定性分析
[J]. 甘肃科学学报 , 2004 , 16 (4 ): 99 -101 .
[本文引用: 1]
ZHANG X H CHEN J Y ZHAO Y G Stability analysis of the leader of the walking pile frame
[J]. Journal of Gansu Sciences , 2004 , 16 (4 ): 99 -101 .
[本文引用: 1]
[6]
曾礼平 基于CAE技术的打桩机桩架结构分析及优化设计
[D]. 南京 : 南京航空航天大学 , 2012 .
[本文引用: 1]
ZENG L P Structural analysis and optimal design of pile driver frame based on CAE technology
[D]. Nanjing : Nanjing University of Aeronautics and Astronautics , 2012 .
[本文引用: 1]
[8]
安治鹏 某履带式桩架稳定性研究及部分结构仿真分析
[D]. 北京 : 北京林业大学 , 2017 .
[本文引用: 1]
AN Z P Study on integral stability and part of the crawler pile frame simulation analysis
[D]. Beijing : Beijing Forestry University , 2017 .
[本文引用: 1]
[9]
钱奂云 , 邓超 , 刘进学 , 等 大型全液压履带桩架的技术创新与产品开发(续)
[J]. 建筑机械 , 2017 (9 ): 17 -21 .
[本文引用: 1]
QIAN H Y DENG C LIU J X et al Technical innovation and product development of large-scale fully hydraulic crawler piling rig (continued)
[J]. Construction Machinery , 2017 (9 ): 17 -21 .
[本文引用: 1]
[10]
顾林坤 , 郭勇 , 钱奂云 , 等 大型桩架多缸立桅机构设计与分析
[J]. 机械设计 , 2017 , 34 (4 ): 7 -11 .
[本文引用: 1]
GU L K GUO Y QIAN H Y et al Design and analysis of multiple hydraulic cylinder mast erecting mechanism for large pile frame
[J]. Journal of Machine Design , 2017 , 34 (4 ): 7 -11 .
[本文引用: 1]
[11]
曹博 , 朱建新 , 朱振新 桩架新型变幅机构的动力学分析
[J]. 机械科学与技术 , 2020 , 39 (4 ): 501 -507 .
[本文引用: 1]
CAO B ZHU J X ZHU Z X Dynamic analysis of new variable amplitude mechanism of pile frame
[J]. Mechanical Science and Technology for Aerospace Engineering , 2020 , 39 (4 ): 501 -507 .
[本文引用: 1]
[12]
朱振新 , 朱建新 , 唐博豪 , 等 多级组合型大角度变幅机构的动力学特性
[J]. 中南大学学报(自然科学版) , 2019 , 50 (6 ): 1334 -1342 .
[本文引用: 1]
ZHU Z X ZHU J X TANG B H et al Dynamics characteristics of multi-stage combined type large angle luffing mechanism
[J]. Journal of Central South University (Science and Technology) , 2019 , 50 (6 ): 1334 -1342 .
[本文引用: 1]
[13]
ZHU Z X ZHU J X KANG H M et al Dynamic modeling of a series multi closed chain two degree of freedom variable amplitude mechanism
[J]. Journal of Central South University , 2021 , 28 (1 ): 168 -178 .
[本文引用: 1]
[14]
康辉梅 , 朱建新 , 王石林 混合链式液压调平机构的动力学特性
[J]. 中南大学学报(自然科学版) , 2019 , 50 (3 ): 557 -563 .
[本文引用: 1]
KANG H M ZHU J X WANG S L Dynamic characteristic of hydraulic leveling mechanism with a hybrid kinematic chain
[J]. Journal of Central South University (Science and Technology) , 2019 , 50 (3 ): 557 -563 .
[本文引用: 1]
[15]
康辉梅 , 许怡赦 , 金耀 伸缩臂叉装车工作装置运动学分析
[J]. 机械设计 , 2015 , 32 (5 ): 39 -42 .
KANG H M XU Y S JIN Y Kinematic analysis for working device of telehandler
[J]. Journal of Machine Design , 2015 , 32 (5 ): 39 -42 .
[16]
CHEN M F HUANG L G ZHANG Y X et al Kinematics analysis and validation of 3-PUU parallel mechanism
[J]. Chinese Journal of Engineering Design , 2023 , 30 (6 ): 763 -778 .
DOI:10.3785/j.issn.1006-754X.2024.03.157
[17]
[本文引用: 1]
ZHAO W B CHEN S X JIANG G W et al Structural design and kinematics analysis of new cable-driven minimally invasive surgical instrument
[J]. Chinese Journal of Engineering Design , 2023 , 30 (6 ): 657 -666 .
DOI:10.3785/j.issn.1006-754X.2023.03.131
[本文引用: 1]
1
2001
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
1
2001
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
全液压履带式桩架的研发与应用
1
2023
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
全液压履带式桩架的研发与应用
1
2023
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
步履式打桩架立柱受力分析计算
1
2004
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
步履式打桩架立柱受力分析计算
1
2004
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
步履式打桩架立柱稳定性分析
1
2004
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
步履式打桩架立柱稳定性分析
1
2004
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
基于CAE技术的打桩机桩架结构分析及优化设计
1
2012
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
基于CAE技术的打桩机桩架结构分析及优化设计
1
2012
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
桩架的起架油缸铰座的分析计算
1
2012
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
桩架的起架油缸铰座的分析计算
1
2012
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
某履带式桩架稳定性研究及部分结构仿真分析
1
2017
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
某履带式桩架稳定性研究及部分结构仿真分析
1
2017
... 桩架是桩基础施工中常用的工程装备[1 -3 ] ,可作为母机搭载柴油锤、液压锤、套管钻机及长螺旋钻机等装置进行多种工法施工.在基础工程建设中,桩架承受着多种复杂载荷,整机稳定性及其零件的受力状况会对其工作寿命和施工效率造成很大影响.因此,许多学者对桩架的受力和稳定性进行了研究.如:张希恒等[4 -5 ] 分析了桩架悬挂长螺旋钻机时立柱的受力状况,并讨论了斜撑的支撑位置对立柱稳定性的影响;曾礼平[6 ] 建立了三支点式履带打桩机的三维CAD模型,并进行了立柱变幅过程的动力学仿真、桩架结构的分析及优化设计;刘振东等[7 ] 分析了在桩架立柱的起架过程中起架油缸铰点的力变化情况,得到了起架油缸铰座的应力云图;安治鹏[8 ] 进行了桩架立柱斜撑结构的有限元建模与静态特性仿真,并对该结构进行屈曲分析,研究了其稳定性.以上研究主要集中在桩架构件强度的有限元分析上,没有设计有效的结构来提高桩架的稳定性. ...
大型全液压履带桩架的技术创新与产品开发(续)
1
2017
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
大型全液压履带桩架的技术创新与产品开发(续)
1
2017
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
大型桩架多缸立桅机构设计与分析
1
2017
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
大型桩架多缸立桅机构设计与分析
1
2017
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
桩架新型变幅机构的动力学分析
1
2020
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
桩架新型变幅机构的动力学分析
1
2020
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
多级组合型大角度变幅机构的动力学特性
1
2019
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
多级组合型大角度变幅机构的动力学特性
1
2019
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
Dynamic modeling of a series multi closed chain two degree of freedom variable amplitude mechanism
1
2021
... 变幅机构是桩架的重要组成部分,起到调整立柱角度和支撑立柱的作用,对桩架的立桅便捷性和作业稳定性有重要影响.传统变幅机构的变幅范围有限,拆卸解体和重新安装都需要吊机辅助,无法进行自主立桅、倒桅作业.因此,钱奂云等[9 ] 提出了桩架多级变幅机构,有效消除了传统变幅机构变幅范围有限的弊端:采用2组液压缸代替传统的桩架斜撑,通过前、后液压缸两级变幅使立柱可以自主进行从水平到竖直的运动,解决了桩架立桅安全性低且操作繁琐的问题;顾林坤等[10 ] 对桩架多级变幅机构进行了参数设计和运动仿真,得到了一组能满足工程设计要求的机构参数;曹博等[11 ] 将桩架多级变幅机构简化为五杆机构,并建立了其动力学模型;朱振新等[12 -13 ] 分别采用拉格朗日法和牛顿欧拉法对桩架多级变幅机构进行动力学分析,得到了前液压缸先收缩、后液压缸再收缩的变幅方式具有更优力学性能的结论.以上分析都将桩架多级变幅机构的空间机构转化为平面机构,所得结果与实际有较大差距.同时,当桩架受到水平方向的作用力时,桩架多级变幅机构中的2个前液压缸因两端铰点距离过长而产生较大弯矩.为了防止变形,前液压缸设计得比较粗笨,从而增大了桩架变幅的能量消耗. ...
混合链式液压调平机构的动力学特性
1
2019
... 为了实现桩架自主变幅,改善桩架在施工时的受力情况,提高桩架变幅机构的支撑稳定性,本文提出了一种新型桩架多级变幅机构.首先,建立了该机构的运动学模型,得到运动学解析解,以研究机构在变幅过程中的运动学特性[14 -17 ] 和运动可行性;其次,设置变幅条件,进行机构参数设计,并利用 MATLAB软件进行分析和计算,以确定前、后液压缸收缩动作的衔接方式和机构参数对变幅运动可行性的影响;最后,利用ADAMS软件仿真得到该机构的速度、加速度、位置等曲线,来验证运动学模型的正确性. ...
混合链式液压调平机构的动力学特性
1
2019
... 为了实现桩架自主变幅,改善桩架在施工时的受力情况,提高桩架变幅机构的支撑稳定性,本文提出了一种新型桩架多级变幅机构.首先,建立了该机构的运动学模型,得到运动学解析解,以研究机构在变幅过程中的运动学特性[14 -17 ] 和运动可行性;其次,设置变幅条件,进行机构参数设计,并利用 MATLAB软件进行分析和计算,以确定前、后液压缸收缩动作的衔接方式和机构参数对变幅运动可行性的影响;最后,利用ADAMS软件仿真得到该机构的速度、加速度、位置等曲线,来验证运动学模型的正确性. ...
3-PUU并联机构的运动学分析与验证
0
2023
3-PUU并联机构的运动学分析与验证
0
2023
新型线驱动式微创手术器械结构设计与运动学分析
1
2023
... 为了实现桩架自主变幅,改善桩架在施工时的受力情况,提高桩架变幅机构的支撑稳定性,本文提出了一种新型桩架多级变幅机构.首先,建立了该机构的运动学模型,得到运动学解析解,以研究机构在变幅过程中的运动学特性[14 -17 ] 和运动可行性;其次,设置变幅条件,进行机构参数设计,并利用 MATLAB软件进行分析和计算,以确定前、后液压缸收缩动作的衔接方式和机构参数对变幅运动可行性的影响;最后,利用ADAMS软件仿真得到该机构的速度、加速度、位置等曲线,来验证运动学模型的正确性. ...
新型线驱动式微创手术器械结构设计与运动学分析
1
2023
... 为了实现桩架自主变幅,改善桩架在施工时的受力情况,提高桩架变幅机构的支撑稳定性,本文提出了一种新型桩架多级变幅机构.首先,建立了该机构的运动学模型,得到运动学解析解,以研究机构在变幅过程中的运动学特性[14 -17 ] 和运动可行性;其次,设置变幅条件,进行机构参数设计,并利用 MATLAB软件进行分析和计算,以确定前、后液压缸收缩动作的衔接方式和机构参数对变幅运动可行性的影响;最后,利用ADAMS软件仿真得到该机构的速度、加速度、位置等曲线,来验证运动学模型的正确性. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}