

在多智能体系统的研究中,多智能体路径规划问题(multi-agent path finding,MAPF)是目前研究的重点之一. 多智能体路径规划算法按照解决方式主要可以分为快速MAPF算法、最优MAPF算法与次优MAPF算法.
快速MAPF算法的主要方式是用尽可能少的交互,将MAPF问题解耦成若干个单智能体的路径规划问题. 其中优先级规划算法是应用最广泛的方法. 优先级规划算法为每个智能体分配一个优先等级,根据智能体的优先等级依次进行单智能体路径规划. Bnaya等[1]提出多种设置优先级的方法来提高算法效率,虽然优先级规划可以用于解决MAPF问题,但优先级规划的解决方案不能保证最佳,也不能保证完整性,即这类快速MAPF算法在可行解存在的MAPF问题实例中存在求解失败的可能性.
最优MAPF算法是用于求解具有完整性与最优性的MAPF算法. 最优MAPF算法可以分为扩展A*搜索、代价增长树搜索与基于冲突搜索3类. Wagner等[2]针对扩展A*搜索提出M*算法,通过动态地改变搜索过程中每一次扩展的分支数量,解决状态空间爆炸的问题. Sharon等[3]提出代价增长树搜索(increasing cost tree search, ICTS)算法,将搜索过程分为上、下2层,对MAPF问题进行求解. ICTS上层搜索基于全局优化目标,为智能体
现有技术存在的缺陷在于对每个智能体的路径进行规划时采用了离散的时间步长,无论是移动还是原地等待,都强制规定智能体在单个时间步长内持续占用当前所在的网格单元,导致智能体到达目标花费的时间较长且成功率较低. 针对上述问题,本文提出连续时间下用于求解MG-TAPF问题的高效算法,优化了现有算法中因采用离散时间所导致的智能体到达目标花费时间较长的问题,求解得到更优的解决方案. 引入冲突分级策略,提高了算法的求解成功率.
1. 问题定义及相关算法
1.1. 问题定义
在MG-TAPF问题中,先为所有智能体进行任务分配,再为每个智能体规划出一条依次经过任务目标的路径.
MG-TAPF问题主要由以下3部分组成.
1)无向图
2)
3)
1)智能体路径从其起始位置开始,即
2)在每一个时间步长t,智能体只能执行2种动作:移动到相邻位置或在当前位置原地等待,
3)智能体到达其被分配任务
连续时间下,MG-TAPF问题中的每个智能体设定如下.
1)设定所有智能体都以相同的速度进行运动.
2)不考虑智能体运动所涉及的惯性问题,智能体可以立即开始或停止运动.
3)某一时刻2个或多个智能体的轮廓存在重叠,表示智能体间的路径存在冲突. 为了方便计算碰撞的开始时间与结束时间,设定所有智能体具有相同的形状与大小.
4)采用一系列运动与等待的动作序列,对智能体路径进行描述. 每个智能体动作序列中每个动作持续时间的总和构成解决方案的总成本.
若每个智能体按照规划好的路径进行运动,且在运动过程中不会与其他智能体发生冲突,则每个智能体路径的集合为当前MG-TAPF的一个可行解. MG-TAPF问题解的评价指标主要为路径总成本与最大完成时间[15]. 路径总成本指所有智能体到达目标位置的路径长度总和. 路径总长度越小,反映了解的质量越高. 最大完成时间指每个智能体完成各自任务所需的最大用时. 最大完成时间越短,反映了解的质量越高.
1.2. 相关算法
结合任务分配的冲突搜索(conflict-based search with optimal task assignment, CBS-TA)算法[16]是TAPF问题中常用的最优求解算法.
该算法采用分层结构,对TAPF问题进行求解. 上层规划器采用多个二叉约束树结构进行组织,树上的每个节点包含一个约束条件集合与一个满足约束集合的多智能体路径规划方案. 智能体间的冲突采用元组
图 1
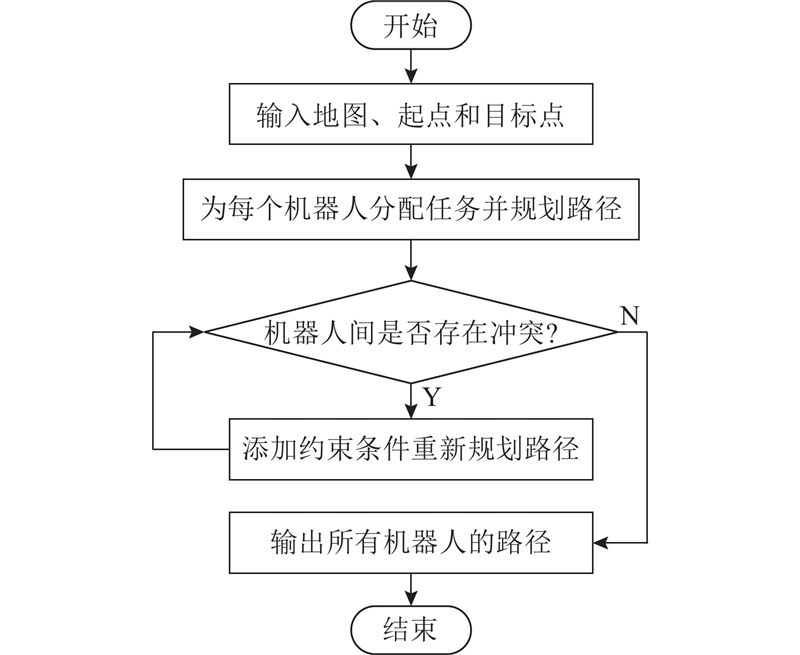
图 1 结合任务分配的冲突搜索算法的基本流程
Fig.1 Basic flow of conflict-based search with optimal task assignment algorithm
2. 算法设计
CBS-TA算法可以用于求解TAPF问题的最优解,但算法的整体流程都基于以下设定.
1)每个智能体的运动都为相同速度的匀速运动,时间被离散为固定的时间步长,通常为智能体从当前栅格运动至相邻栅格的时间.
2)智能体无论是移动至相邻栅格或是原地等待,都为固定的时间步长.
3)在每个时间步长中,智能体始终占据当前顶点.
由此,下层规划器常采用4邻域作为路径规划时的搜索范围. 由于使用栅格与时间步长描述智能体的路径,智能体在当前时间段内始终在某一栅格,下一时刻始终在相邻栅格,这省略了智能体运动的过程. 这些简化的设定限制了算法在实际应用中的适用性.
针对上述CBS-TA算法的不足,作出以下改进:定义连续时间下智能体间的冲突与解冲突方式,在下层规划器中引入安全间隔与标签的概念,引入冲突分级策略.
2.1. 上层规划器
在连续时间下,由于需要考虑智能体的形状,边缘冲突不仅发生在2个智能体沿同一条边对向运动时,还可能因它们在不同边上运动但间距过小而触发,如图2(a)所示. 顶点冲突不仅在2个智能体同时占据同一顶点时发生,一个运动的智能体与另一个在顶点执行等待动作的智能体也会发生顶点冲突,如图2(b)所示. 在离散时间下,边缘冲突与顶点冲突通常使用元组
图 2
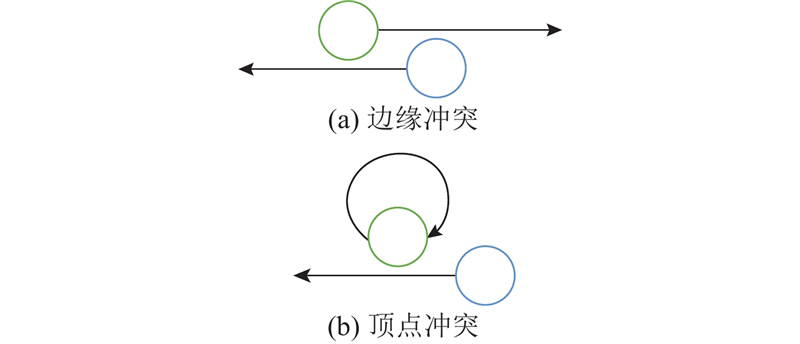
图 2 连续时间下边缘冲突与顶点冲突的示意图
Fig.2 Schematic diagram of edge conflict and vertex conflict in continuous time
将算法推广至连续时间后,采用最佳优先搜索,在每次迭代中选择约束树中路径成本总和最小的节点. 若检测到碰撞,则生成2个子节点,并为2个节点分别添加解冲突的约束. 在连续时间下,智能体等待时间无须为时间步长的整数倍. 仿照冲突定义的修改,将用于解决冲突
针对发生冲突的最小时间间隔
根据输入无向图
2.2. 下层规划器
为了规划得到满足上层规划器约束的最优路径,以A*算法作为基础,引入安全间隔. 若智能体在某一节点从开始时刻起始终停留在此处,且不会与其他智能体发生碰撞,则该节点的安全间隔为
利用改进后的算法,可以规划得到满足上层规划器约束的最优路径. 若约束
将A*算法中搜索后继节点的过程进行如下更改.
1)获取节点邻域内的所有节点,根据当前位置到节点间的距离,得到运动至每个节点所需的时间
2)根据当前所在节点的安全间隔,分别加上
3)与每个节点的每个安全间隔
4)计算到达相邻节点对应安全间隔的最早时间
在MG-TAPF问题中,下层规划器需要规划出智能体
算法 1 下层规划器输入:起点s,目标点g输出:机器人路径 Path1. insert s to OPEN2. while g is not in OPEN do3. P←best node from OPEN4. Insert P_neighbor to OPEN5. while P_Arrive ∩ P_Safe=ϕ do6. P ← next node from OPEN7. insert P to Path8. end while9. end while10. return Path
2.3. 冲突分级
提出连续时间下引入安全间隔的路径规划算法,改进后的算法虽然减少了路径总成本,但由于碰撞检测与冲突避免需要较大的计算量,在智能体分布较密集的场景下,该算法需要较长的求解时间. 除此之外,将该算法推广至求解MG-TAPF后,多目标位置将带来更大的计算量,这对该算法的求解效率提出了更高的要求.
在上层规划器中,针对当前路径中的多个冲突,往往选择优先解决最早发生的冲突,但这有时会导致扩展更多的节点. 随着碰撞检测代价的提高,扩展较多节点会大大延长找到最优解所需的时间. 由此,引入冲突分级的概念,将冲突分类为重要冲突、次要冲突与非重要冲突.
重要冲突指解决冲突后的2个子节点的路径总成本都高于父节点. 次要冲突指解决冲突后的2个子节点的路径总成本一个高于父节点,一个与父节点成本相同. 非重要冲突指解决冲突后2个子节点的总成本都与父节点相同.
对约束树扩展过程进行修改,当对节点进行扩展时,检查所有存在的冲突. 若检查到重要冲突,则解决该冲突并生成子节点. 若无重要冲突,则优先解决次要冲突,若无次要冲突则解决非重要冲突. 通过对智能体间的冲突进行分级,减少约束树扩展的节点个数,以缩短算法的求解时间.
3. 实验结果和分析
3.1. 实验设置
基于C++实现了连续时间内结合任务分配路径规划算法,其中代码使用Boost库用于数学计算. 本次测试采用3种场景:10 m×10 m的空旷场景、10 m×16 m的随机障碍物的场景与10 m×16 m的仓储场景. 其中,设定地图中每个栅格为1 m,在随机障碍物场景的栅格地图中随机选取20%的栅格设置为障碍物,在仓储场景中选取20%的栅格设置为障碍物,障碍物用黑色方块表示. 仓储场景与随机障碍物场景如图3所示. 在不同场景中,随机初始化智能体的起始位置与任务的目标位置,保证所有起始位置和目标位置不重叠. 将智能体的形状设置为半径为
图 3
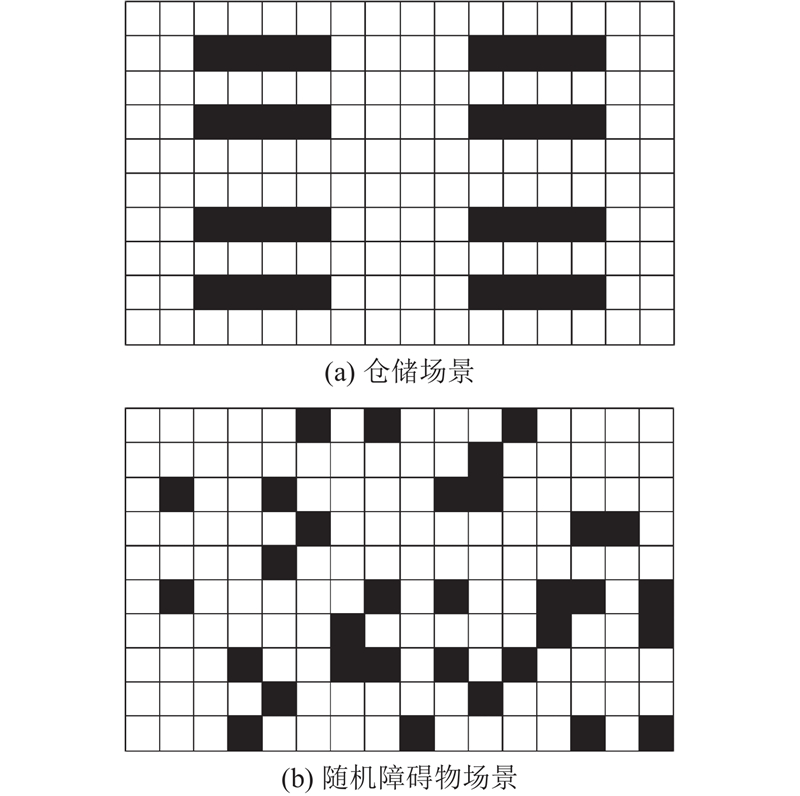
图 3 随机障碍物场景与仓储场景的示意图
Fig.3 Schematic diagram of random obstacle scenario and storage scenario
3.2. 实验结果
使用2种算法作为实验的对比算法:TA-CBS与CBS-TA. TA-CBS为TAPF问题的常用解决方式,将问题分解为任务分配与多智能体路径规划[5]2个部分单独进行求解. CBS-TA为离散时间下的TAPF问题最优求解器. TA-CBS算法通过在CBS-TA算法中移除约束树根节点的初始任务分配预处理机制,转而采用动态优先级分配策略,可以保证两者具有相同的运算效率. 由于两者都是基于离散时间的算法,下层规划器都采用搜索范围为4邻域的A*算法. TA-ICTS[3]采用任务分配与代价增长树搜索算法对问题进行求解,整数线性规划(integer linear program, ILP)算法[19]通过将TAPF问题转化为线性规划问题进行求解. 下层规划器的节点搜索范围采用8邻域,并将冲突时间间隔计算的精准度设置为10−7 s.
将每个实例的求解时间限制为30 s,在不同场景、不同智能体数量
图 4
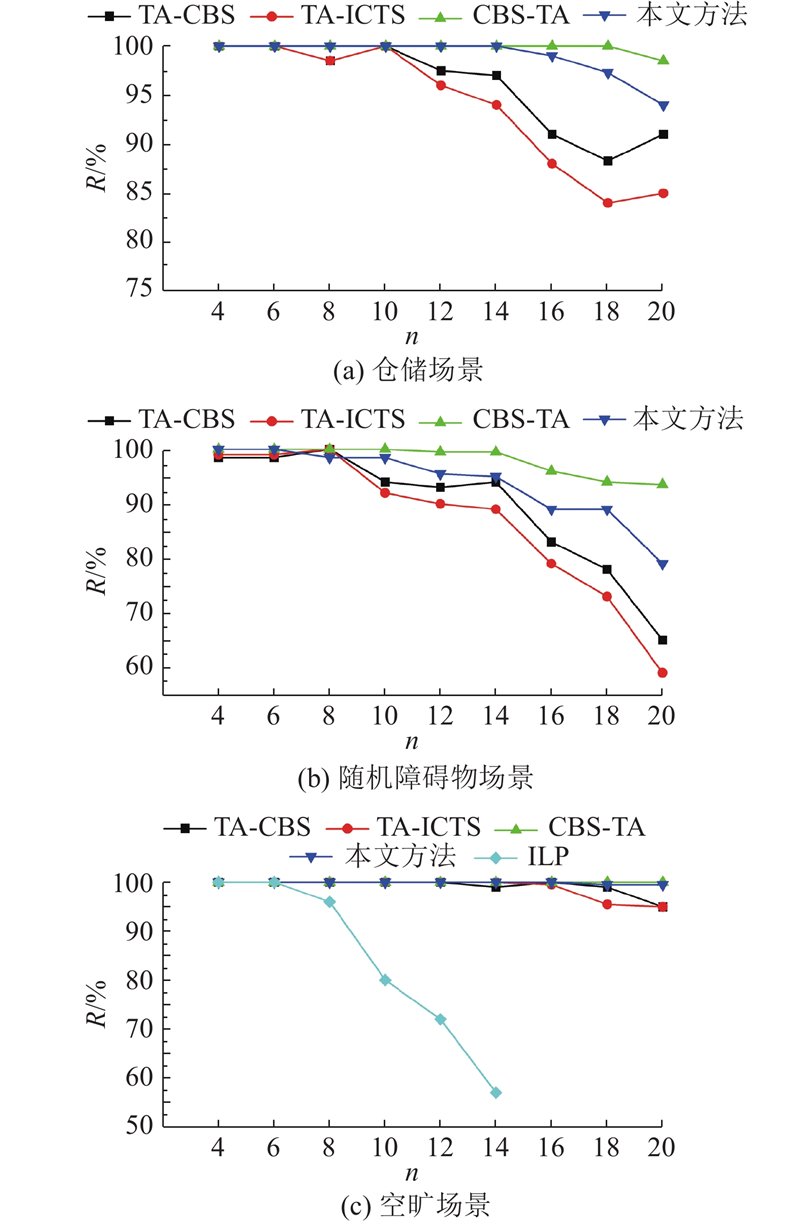
图 4 不同场景下算法求解的成功率
Fig.4 Success rate of algorithm solving in different scenario
如图5所示为该算法在不同场景、不同
图 5
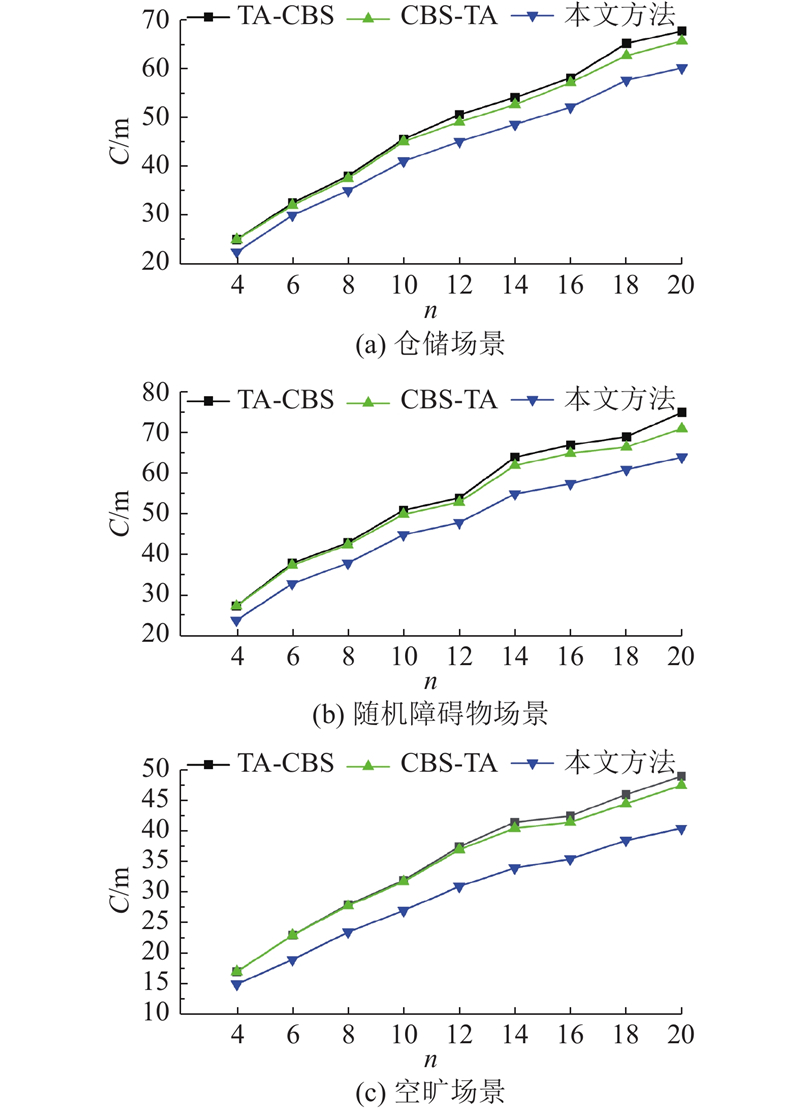
如表1所示为3种算法在3种场景下平均路径总成本的总和S. 可以看出,以TA-CBS作为基准,3种场景下,通过将任务分配与冲突搜索融合,在空旷场景下路径总成本降低了2.14%,在随机障碍物场景下降低了2.57%,仓储场景下降低了2.22%. 本文提出的算法在空旷场景下路径总成本降低了16.13%,在随机障碍物场景下降低了12.57%,在仓储场景下降低了9.80%. 由于在仓储场景下障碍物集中分布,场景中存在较多宽度仅为一个栅格大小的可通行区域,所以下层规划器采用8邻域,较4邻域搜索不会降低理想的路径成本开销,这使得本文算法在仓储场景下的解质量提升低于另外2种场景. 综合3种场景,利用提出的算法,显著降低了路径总成本.
表 1 不同场景下平均路径总成本总和的统计表
Tab.1
| 场景 | S/m | ||
| TA-CBS | CBS-TA | 提出算法 | |
| 空旷 | 317. 3 | 310. 52 | 266. 12 |
| 随机障碍物 | 488. 77 | 476. 20 | 427. 35 |
| 仓储 | 436. 80 | 427. 12 | 393. 99 |
在基于栅格地图的图搜索路径规划算法中,可以通过扩大搜索范围进一步优化解的质量. 如表2所示为算法在随机障碍物场景中不同邻域大小下的平均路径总成本
表 2 提出算法在不同邻域大小下的平均路径总成本统计表
Tab.2
| 4邻域 | 8邻域 | 16邻域 | 32邻域 | |
| 4 | 27. 34 | 24. 45 | 24. 07 | 23. 98 |
| 6 | 37. 41 | 33. 48 | 33. 10 | 32. 92 |
| 8 | 42. 53 | 38. 24 | 37. 74 | 37. 65 |
| 10 | 50. 33 | 45. 17 | 44. 63 | 44. 21 |
| 12 | 53. 65 | 48. 25 | 47. 70 | 47. 62 |
| 14 | 62. 10 | 54. 67 | 54. 21 | 53. 70 |
| 16 | 64. 22 | 57. 38 | 56. 57 | 56. 52 |
| 18 | 67. 15 | 60. 93 | 60. 88 | 60. 05 |
| 20 | 70. 83 | 64. 78 | 64. 79 | 63. 92 |
在随机障碍物场景下,4、10、16个智能体的实例在不同搜索邻域大小[20]下的平均求解时间T如表3所示. 可以看出,当智能体数为4时,算法的平均求解时间随着搜索邻域的扩大而增长.当智能体数为10时,8邻域的平均求解时间较4邻域更少. 当智能体数增加至16时,8邻域的平均求解时间更加显著地少于4邻域,同时16邻域与32邻域的平均求解时间始终多于8邻域. 测试结果表明,随着搜索邻域的扩大,计算量增大,求解时间增长. 同时,4邻域虽然可以在较短的时间内完成路径规划,但求解的路径长度较长,增大了发生冲突的概率. 当智能体分布较密集时,上层规划器需要扩展更多的节点以解决冲突,这使得4邻域下算法需要更长的时间进行求解. 在智能体分布密集的场景下,本文算法的路径总成本与求解时间更少.
表 3 不同智能体数下的平均求解时间统计表
Tab.3
| T/s | ||||
| 4邻域 | 8邻域 | 16邻域 | 32邻域 | |
| 4 | 0.000 7 | 0.000 8 | 0.001 1 | 0.001 6 |
| 10 | 0.006 0 | 0.005 0 | 0.011 0 | 0.021 0 |
| 16 | 0.210 0 | 0.120 0 | 0.200 0 | 0.256 0 |
在仓储与随机障碍物场景中,测试了引入冲突分级的算法与原始算法的表现,如图6所示. 可以看出,在2种不同的场景下,引入冲突分级的算法都具有更少的平均扩展节点数
图 6
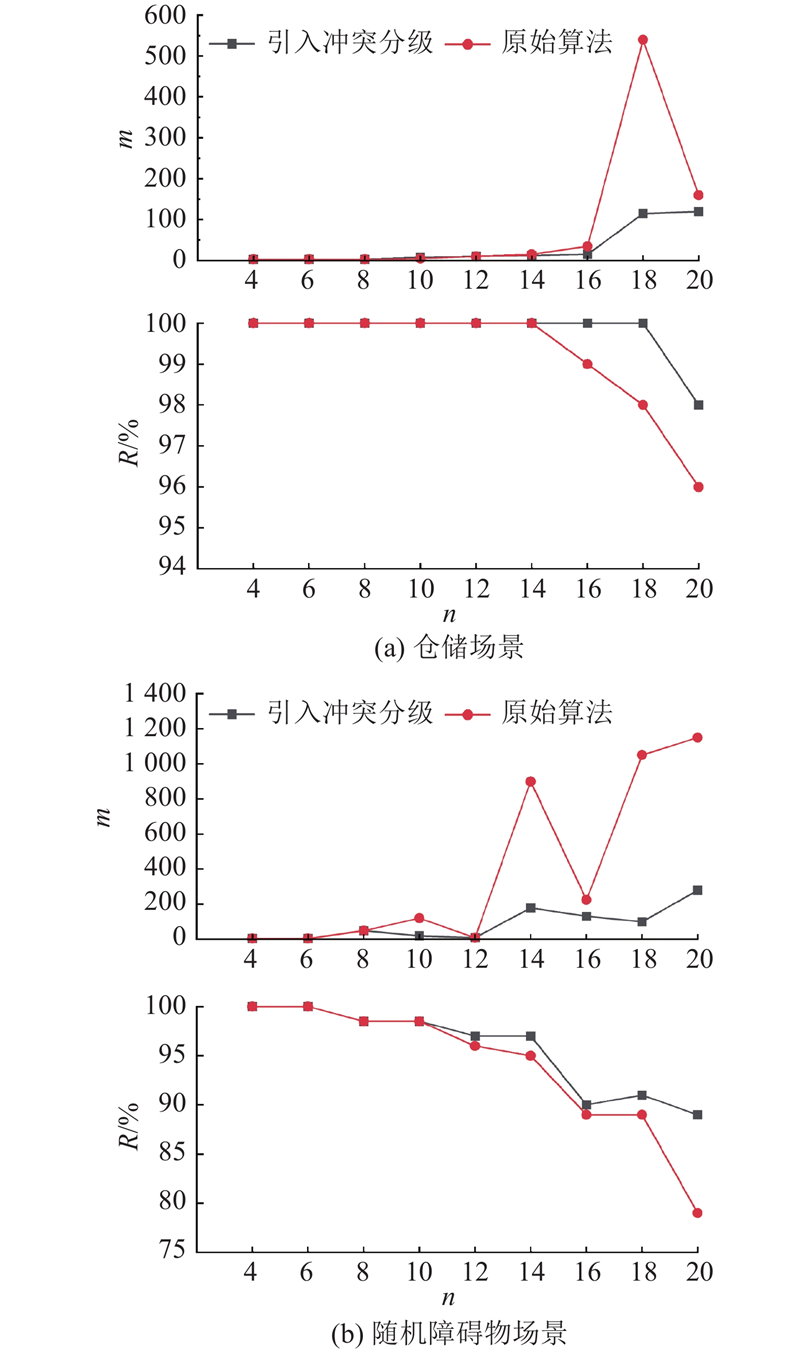
图 6 引入冲突分级后算法的平均扩展节点数与求解成功率
Fig.6 Average number of expanded nodes and solution success rate of algorithm after introducing conflict hierarchy
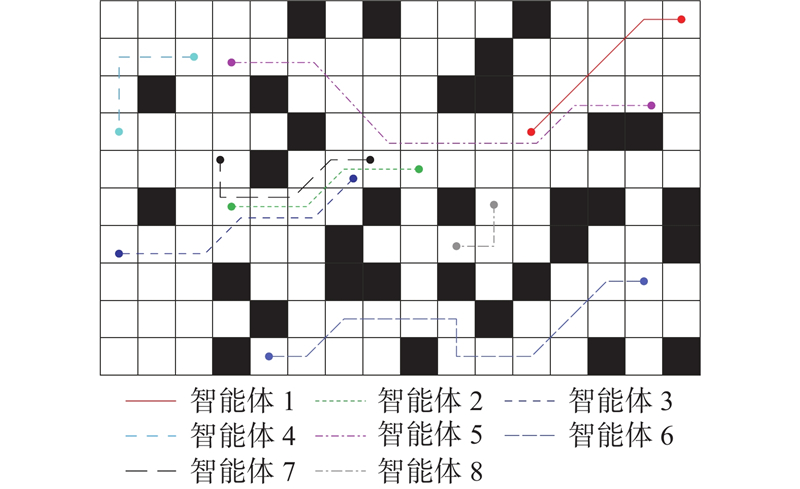
如图7~9所示分别为利用TA-CBS算法、CBS-TA算法与提出算法解决某一包含8个智能体的TAPF问题的求解结果. 图中,每条路径的方形端点为智能体的初始位置,圆形端点为智能体被分配的任务位置. 设定图7~9中左上栅格坐标为(0,0),右下栅格坐标为(9,15). 利用TA-CBS算法计算任务分配,最终的任务分配方式如图7所示. 可以看出,根据任务分配规划对应路径后,智能体2、智能体3与智能体7存在冲突. 在智能体2达到任务位置(4,6)后,智能体3与智能体7无法按照原有规划到达任务位置. 为了解决该冲突,最终的求解结果为智能体2在坐标为(4, 5)的栅格原地等待5个时间步长,等待完成后,智能体7已到达任务位置(4,8),智能体3到达(4,6)栅格,下个时间步长智能体2从(4,5)运动至(4,6). 此时3个智能体间不存在冲突,直接输入所有智能体路径得到问题的解,最终的路径总成本为66 m. CBS-TA算法的初始任务分配与TA-CBS算法相同,但利用CBS-TA算法探索冲突场景下的全局最优解,将生成额外的任务分配方案. 从图8可以看出,CBS-TA算法在额外的任务分配方案中找到了问题的最优解. 相较于初始任务分配方案,智能体2、3、6、7、8所分配的任务发生了变化,最终路径总成本为61 m,低于TA-CBS算法. 由于下层规划器采用8邻域,利用提出算法得到了更低的路径代价,最终的解决方案如图9所示,路径总成本为53.38 m,显著低于TA-CBS算法与CBS-TA算法.
图 7
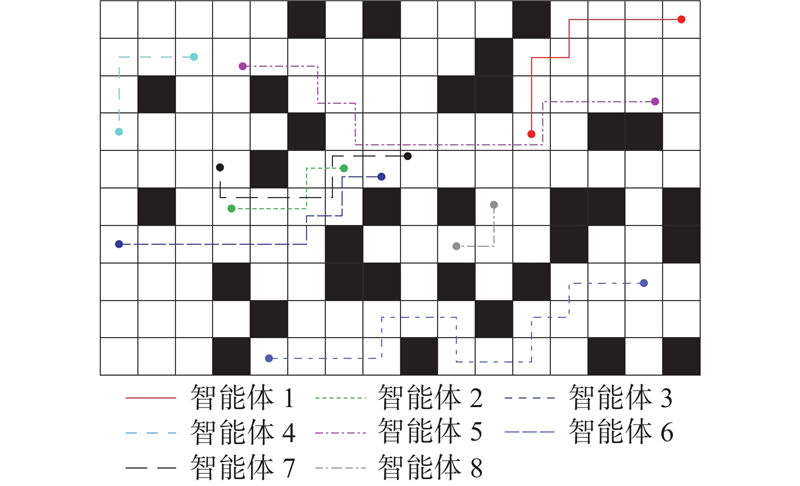
图 8
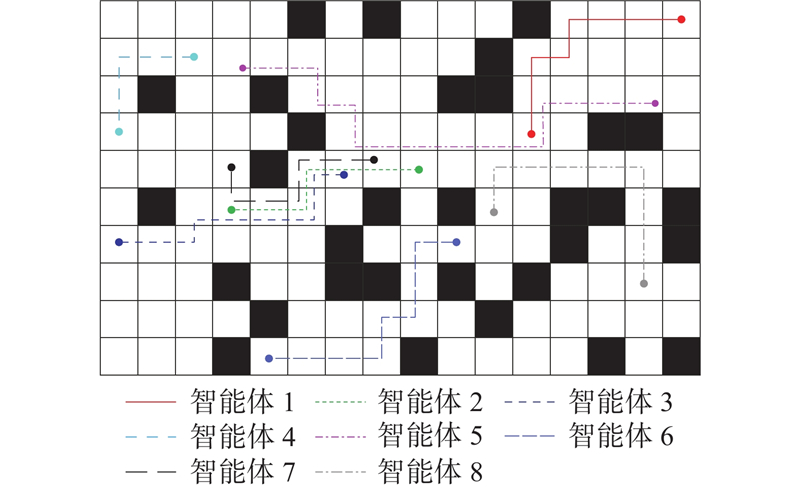
图 9
4. 结 语
多智能体任务分配与路径规划问题作为多智能体系统中的重要部分,本文提出连续时间下可用于求解多目标任务的多智能体路径规划算法. 在原有的算法框架下,提出连续时间下的碰撞检测方式、冲突定义与解冲突方式. 在下层规划器中为每个路径点引入安全间隔与标签概念,改进算法搜索流程. 提出冲突分级策略,加快算法的求解速度. 实验表明,与CBS-TA算法相比,提出算法的路径总成本在空旷场景下降低了13.99%,在随机障碍物场景下降低了10.00%,在仓储场景下降低了7.58%. 利用提出算法可以求解得到更优的解决方案,具有更高的适用性.
参考文献
Subdimensional expansion for multirobot path planning
[J].
The increasing cost tree search for optimal multi-agent pathfinding
[J].
Conflict-based search for optimal multi-agent pathfinding
[J].
Studies in semi-admissible heuristics
[J].
考虑客户等级和时变路况的无人物流配送路径
[J].
Unmanned logistics distribution route considering customer level and time-varying road conditions
[J].
末端配送服务模式与路径联合优化
[J].
Joint optimization of terminal distribution service mode and distribution routing
[J].
面向电弧增材的单线激光扫描路径规划
[J].
Single-line laser scanning path planning for wire arc and additive manufacturing
[J].
Optimal multirobot path planning on graphs: complete algorithms and effective heuristics
[J].DOI:10.1109/TRO.2016.2593448 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}