多目标多智能体路径规划方法
Multi-goal multi-agent path finding algorithm
多目标多智能体路径规划方法 |
| 张静,王祎,陈子龙,李云松 |
|
Multi-goal multi-agent path finding algorithm |
| Jing ZHANG,Yi WANG,Zilong CHEN,Yunsong LI |
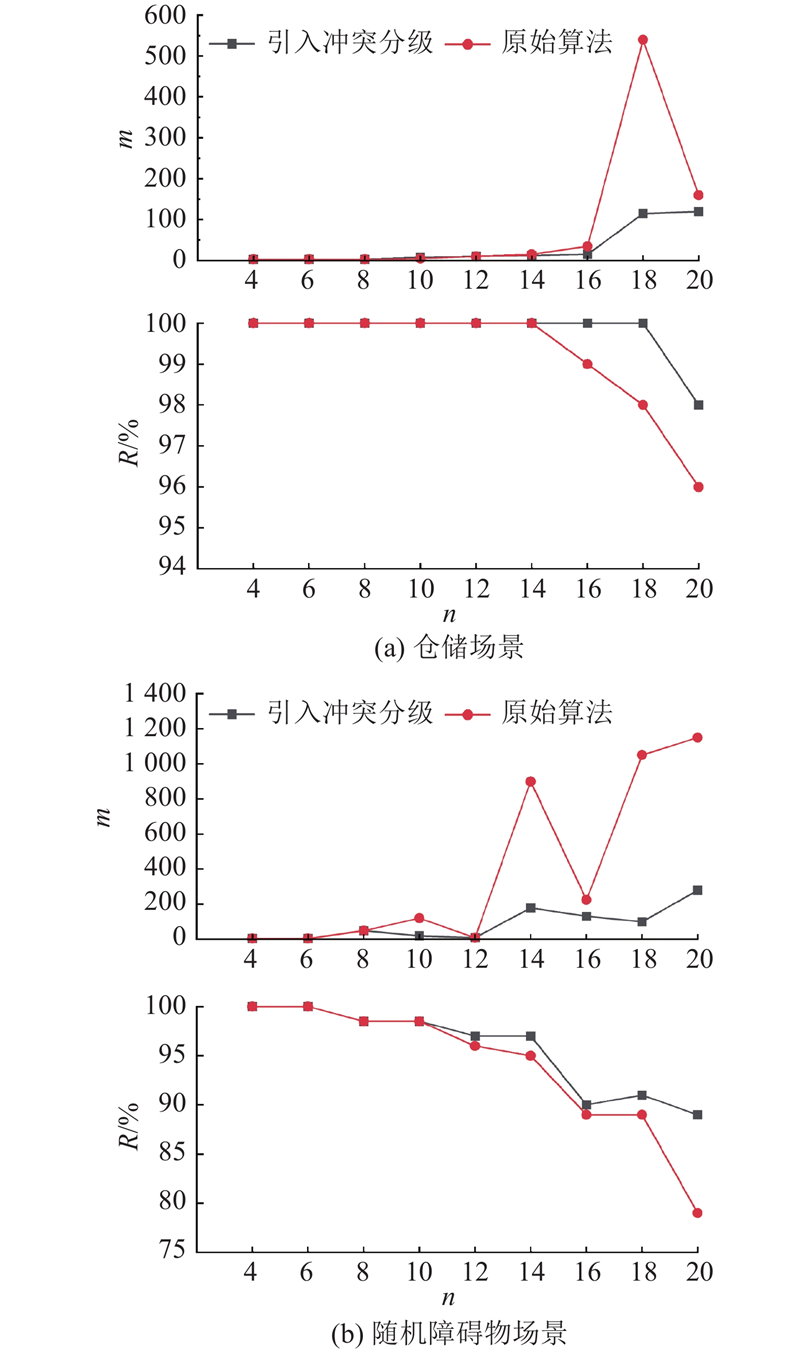
| 图 6 引入冲突分级后算法的平均扩展节点数与求解成功率 |
| Fig.6 Average number of expanded nodes and solution success rate of algorithm after introducing conflict hierarchy |
|
|