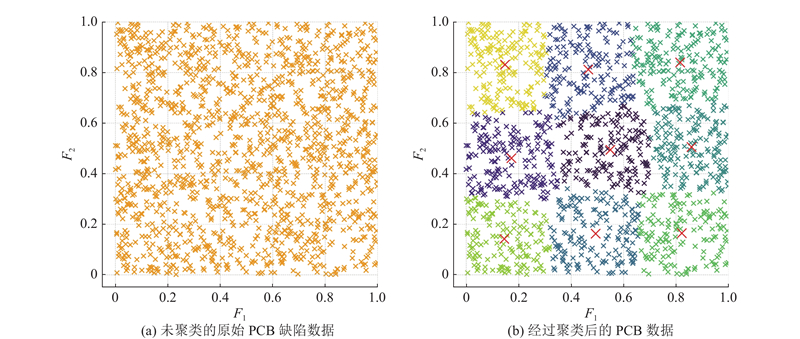
式中:$ {\mathrm{bo}}{x{\mathrm{}}}_{i} $ $ i $ $ {{\mathrm{cen}}}_{j} $ $ j $ $ K=9 $ $ K=9 $ 图2 所示. 其中,F 1 、F 2 分别为特征1、特征2的值. 结果表明,结合HDBSCAN和二分K-means,可以实现对不同尺度和形状的目标框的有效聚类.
[1]
XIAO Z, WANG Z, LIU D, et al A path planning algorithm for PCB surface quality automatic inspection
[J]. Journal of Intelligent Manufacturing , 2021 , 33 (6 ): 1 - 13
[本文引用: 1]
[2]
黄银花, 李东波. 高速高精度印刷电路板表面贴装自动光学检测系统的研究 [J]. 机床与液压, 2014, 42(21): 105-108.
[本文引用: 1]
HUANG Yinhua , LI Dongbo. Research on high-speed and high-precision automatic optical inspection system for surface mount technology of printed circuit board [J]. Machine Tool and Hydraulics , 2014, 42(21): 105-108.
[本文引用: 1]
[3]
赵翔宇, 周亚同, 何峰, 等 分层提取匹配印刷电路板元器件缺陷检测
[J]. 仪表技术与传感器 , 2018 , (8 ): 84 - 89
DOI:10.3969/j.issn.1002-1841.2018.08.022
[本文引用: 1]
ZHAO Xiangyu, ZHOU Yatong, HE Feng, et al Defect detection of printed circuit board components based on hierarchical extraction and matching
[J]. Instrument Technique and Sensor , 2018 , (8 ): 84 - 89
DOI:10.3969/j.issn.1002-1841.2018.08.022
[本文引用: 1]
[4]
郭庆梅, 刘宁波, 王中训, 等. 基于深度学习的目标检测算法综述 [J]. 探测与控制学报, 2023, 45(6): 10-20.
[本文引用: 1]
GUO Qingmei, LIU Ningbo , WANG Zhongxun, et al. A review of object detection algorithms based on deep learning [J]. Journal of Detection and Control , 2023, 45(6): 10-20.
[本文引用: 1]
[6]
谢富, 朱定局 深度学习目标检测方法综述
[J]. 计算机系统应用 , 2022 , 31 (2 ): 1 - 12
[本文引用: 1]
XIE Fu, ZHU Dingju A review of deep learning-based object detection methods
[J]. Computer Systems and Application , 2022 , 31 (2 ): 1 - 12
[本文引用: 1]
[7]
HU B, WANG J H Detection of PCB surface defects with improved faster-RCNN and feature pyramid network
[J]. IEEE Access , 2020 , (8 ): 108335 - 108345
[本文引用: 1]
[8]
TSAI D-M, CHOU Y-H Fast and precise positioning in PCBs using deep neural network regression
[J]. IEEE Transactions on Instrumentation and Measurement , 2019 , 69 (7 ): 4692 - 4701
[本文引用: 1]
[9]
ZHANG H, JIANG L, LI C CS-ResNet: cost-sensitive residual convolutional neural network for PCB cosmetic defect detection
[J]. Expert Systems with Applications , 2021 , 185 : 115673
DOI:10.1016/j.eswa.2021.115673
[本文引用: 1]
[10]
张艳, 张明路, 吕晓玲, 等 深度学习小目标检测算法研究综述
[J]. 计算机工程与应用 , 2022 , 58 (15 ): 1 - 17
DOI:10.3778/j.issn.1002-8331.2112-0176
[本文引用: 1]
ZHANG Yan, ZHANG Minglu, LV Xiaoling, et al A review of deep learning-based small object detection algorithms
[J]. Computer Engineering and Applications , 2022 , 58 (15 ): 1 - 17
DOI:10.3778/j.issn.1002-8331.2112-0176
[本文引用: 1]
[11]
王永利, 曹江涛, 姬晓飞 基于卷积神经网络的PCB缺陷检测与识别算法
[J]. 电子测量与仪器学报 , 2019 , 33 (8 ): 78 - 84
[本文引用: 1]
WANG Yongli, CAO Jiangtao, JI Xiaofei PCB defect detection and recognition algorithm based on convolutional neural network
[J]. Journal of Electronic Measurement and Instrumentation , 2019 , 33 (8 ): 78 - 84
[本文引用: 1]
[12]
苏佳, 贾欣雨, 侯卫民 基于YOLO-J的PCB缺陷检测算法
[J]. 计算机集成制造系统 , 2024 , 30 (11 ): 3984 - 3998
[本文引用: 1]
SU Jia, JIA Xinyu, HOU Weimin PCB defect detection algorithm based on YOLO-J
[J]. Computer Integrated Manufacturing Systems , 2024 , 30 (11 ): 3984 - 3998
[本文引用: 1]
[13]
王淑青, 张子言, 朱文鑫, 等 基于改进YOLOv5的PCB板表面缺陷检测
[J]. 仪表技术与传感器 , 2023 , (5 ): 106 - 111
DOI:10.3969/j.issn.1002-1841.2023.05.020
[本文引用: 1]
WANG Shuqing, ZHANG Ziyan, ZHU Wenxin, et al Surface defect detection of PCB based on improved YOLOv5
[J]. Instrument Technique and Sensor , 2023 , (5 ): 106 - 111
DOI:10.3969/j.issn.1002-1841.2023.05.020
[本文引用: 1]
[14]
WANG X, ZHANG H Y, LIU Q H, et al You-only-look-once multiple-strategy printed circuit board defect detection model
[J]. IEEE Multimedia , 2024 , 31 (1 ): 76 - 87
[本文引用: 1]
[15]
GEOFFREY S, MAHMOOD A-K. An implementation of the HDBSCAN* clustering algorithm [J], Applied Sciences , 2022, 12(5): 2405.
[本文引用: 1]
[16]
WANG Z, WU L, LI T, et al A smoke detection model based on improved YOLOv5
[J]. Mathematics , 2022 , 10 (7 ): 1190
DOI:10.3390/math10071190
[本文引用: 1]
[17]
葛程鹏, 赵东, 王蕊, 等 基于改进DBSCAN和距离共识评估的分段点云去噪方法
[J]. 系统仿真学报 , 2024 , 36 (8 ): 1800 - 1809
[本文引用: 1]
GE Chengpeng, ZHAO Dong, WANG Rui, et al A denoising method for segmented point cloud based on improved DBSCAN and distance consensus evaluation
[J]. Journal of System Simulation , 2024 , 36 (8 ): 1800 - 1809
[本文引用: 1]
[18]
CHIEN-YAO W, YEH IH, HONG-YUAN MARK L. YOLOv9: learning what you want to learn using programmable gradient information [EB/OL]. (2024-02-29) [2024-08-01]. https://doi.org/10.48550/arXiv.2402.13616.
[本文引用: 1]
[19]
HE J J, ZHANG S H, YANG C H, et al. Pest recognition in microstates state: an improvement of YOLOv7 based on spatial and channel reconstruction convolution for feature redundancy and vision transformer with bi-level routing attention [J]. Frontiers in Plant Science, 2024, 15: 1327237.
[本文引用: 1]
[20]
XU X Z, JIANG Y Q, CHEN W H, et al. DAMO-YOLO : a report on real-time object detection design [EB/OL]. (2023-04-24) [2024-08-01]. https://doi.org/10.48550/arXiv.2211.15444.
[本文引用: 1]
[21]
CHEN Z X, HE Z W, LU Z-M DEA-Net: single image dehazing based on detail-enhanced convolution and content-guided attention
[J]. IEEE Transactions on Image Processing , 2024 , 33 : 1002 - 1015
DOI:10.1109/TIP.2024.3354108
[本文引用: 1]
[22]
LIU W Z, LU H, FU H T, et al. Learning to upsample by learning to sample [EB/OL]. (2023-08-29) [2024-08-01]. https://doi.org/10.48550/arXiv.2308.15085.
[本文引用: 1]
[23]
CHENG C S, HOU C J, WEN X, et al Small-sample underwater target detection: a joint approach utilizing diffusion and YOLOv7 model
[J]. Remote Sensing , 2023 , 15 (19 ): 4772
DOI:10.3390/rs15194772
[本文引用: 1]
[24]
GUO A, SUN K Q, ZHANG Z Y A lightweight YOLOv8 integrating FasterNet for real-time underwater object detection
[J]. Journal of Real-Time Image Processing , 2024 , 21 (2 ): 1 - 15
[本文引用: 1]
[26]
ZHOU G A, YU L J, SU Y X, et al Lightweight PCB defect detection algorithm based on MSD-YOLO
[J]. Cluster Computing , 2023 , 27 (3 ): 3559 - 3573
[本文引用: 2]
[27]
YUAN Z H, TANG X Y, NING H, et al LW-YOLO: lightweight deep learning model for fast and precise defect detection in printed circuit boards
[J]. Symmetry , 2024 , 16 (4 ): 418
DOI:10.3390/sym16040418
[本文引用: 2]
[28]
TANG J L, LIU S B, ZHAO D X, et al PCB-YOLO: an improved detection algorithm of PCB surface defects based on YOLOv5
[J]. Sustainability , 2023 , 15 (7 ): 5963
DOI:10.3390/su15075963
[本文引用: 2]
[29]
DU B W, WAN F, LEI G B, et al YOLO-MBBi: PCB surface defect detection method based on enhanced YOLOv5
[J]. Electronics , 2023 , 12 (13 ): 2821
DOI:10.3390/electronics12132821
[本文引用: 3]
A path planning algorithm for PCB surface quality automatic inspection
1
2021
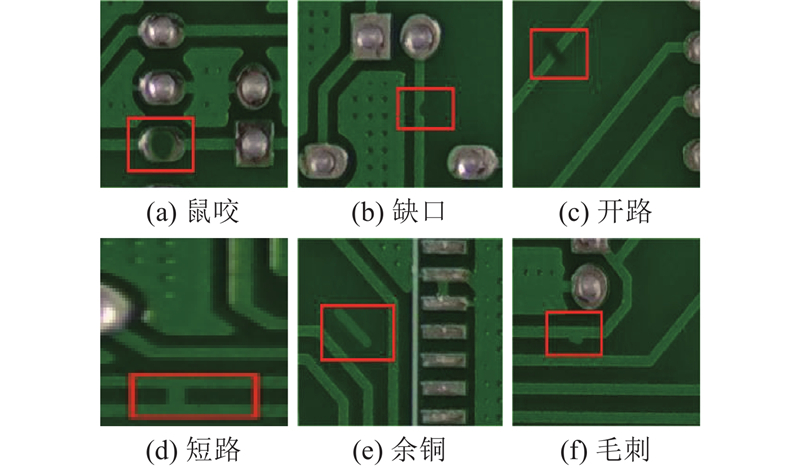
... 近年来,PCB在电子制造行业中扮演着至关重要的角色. 在PCB的制造过程中,由于制造设备、材料质量以及环境因素等多种原因,常常会出现短路、缺口等缺陷. 传统的PCB缺陷检测依靠人工的目视检测[1 ] 、光学检测[2 ] 和电气检测[3 ] . 人工检测容易受到工人主观意识的影响,自动化的光学和电气检测虽然提高了效率,但在面对复杂和微小缺陷时效果不佳. 基于深度学习的PCB缺陷检测以其高精度、高效率和可扩展性,成为现代电子制造中不可或缺的检测技术. ...
1
... 近年来,PCB在电子制造行业中扮演着至关重要的角色. 在PCB的制造过程中,由于制造设备、材料质量以及环境因素等多种原因,常常会出现短路、缺口等缺陷. 传统的PCB缺陷检测依靠人工的目视检测[1 ] 、光学检测[2 ] 和电气检测[3 ] . 人工检测容易受到工人主观意识的影响,自动化的光学和电气检测虽然提高了效率,但在面对复杂和微小缺陷时效果不佳. 基于深度学习的PCB缺陷检测以其高精度、高效率和可扩展性,成为现代电子制造中不可或缺的检测技术. ...
1
... 近年来,PCB在电子制造行业中扮演着至关重要的角色. 在PCB的制造过程中,由于制造设备、材料质量以及环境因素等多种原因,常常会出现短路、缺口等缺陷. 传统的PCB缺陷检测依靠人工的目视检测[1 ] 、光学检测[2 ] 和电气检测[3 ] . 人工检测容易受到工人主观意识的影响,自动化的光学和电气检测虽然提高了效率,但在面对复杂和微小缺陷时效果不佳. 基于深度学习的PCB缺陷检测以其高精度、高效率和可扩展性,成为现代电子制造中不可或缺的检测技术. ...
分层提取匹配印刷电路板元器件缺陷检测
1
2018
... 近年来,PCB在电子制造行业中扮演着至关重要的角色. 在PCB的制造过程中,由于制造设备、材料质量以及环境因素等多种原因,常常会出现短路、缺口等缺陷. 传统的PCB缺陷检测依靠人工的目视检测[1 ] 、光学检测[2 ] 和电气检测[3 ] . 人工检测容易受到工人主观意识的影响,自动化的光学和电气检测虽然提高了效率,但在面对复杂和微小缺陷时效果不佳. 基于深度学习的PCB缺陷检测以其高精度、高效率和可扩展性,成为现代电子制造中不可或缺的检测技术. ...
分层提取匹配印刷电路板元器件缺陷检测
1
2018
... 近年来,PCB在电子制造行业中扮演着至关重要的角色. 在PCB的制造过程中,由于制造设备、材料质量以及环境因素等多种原因,常常会出现短路、缺口等缺陷. 传统的PCB缺陷检测依靠人工的目视检测[1 ] 、光学检测[2 ] 和电气检测[3 ] . 人工检测容易受到工人主观意识的影响,自动化的光学和电气检测虽然提高了效率,但在面对复杂和微小缺陷时效果不佳. 基于深度学习的PCB缺陷检测以其高精度、高效率和可扩展性,成为现代电子制造中不可或缺的检测技术. ...
1
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
1
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
基于深度学习的小目标检测技术发展
1
2023
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
基于深度学习的小目标检测技术发展
1
2023
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
深度学习目标检测方法综述
1
2022
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
深度学习目标检测方法综述
1
2022
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
Detection of PCB surface defects with improved faster-RCNN and feature pyramid network
1
2020
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
Fast and precise positioning in PCBs using deep neural network regression
1
2019
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
CS-ResNet: cost-sensitive residual convolutional neural network for PCB cosmetic defect detection
1
2021
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
深度学习小目标检测算法研究综述
1
2022
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
深度学习小目标检测算法研究综述
1
2022
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
基于卷积神经网络的PCB缺陷检测与识别算法
1
2019
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
基于卷积神经网络的PCB缺陷检测与识别算法
1
2019
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
基于YOLO-J的PCB缺陷检测算法
1
2024
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
基于YOLO-J的PCB缺陷检测算法
1
2024
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
基于改进YOLOv5的PCB板表面缺陷检测
1
2023
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
基于改进YOLOv5的PCB板表面缺陷检测
1
2023
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
You-only-look-once multiple-strategy printed circuit board defect detection model
1
2024
... 深度学习在目标检测领域主要有双阶段检测[4 ] 与单阶段检测[5 ] 2种算法. 双阶段检测算法通过生成一系列可能包含目标的候选区域,随后对这些区域进行详细分类. 目前主流的双阶段算法主要是基于区域的卷积神经网络(region-based convolutional neural network,R-CNN)系列,其中包括Mask R-CNN、Fast R-CNN及Faster R-CNN等[6 ] . Hu等[7 ] 在Faster R-CNN框架内创新性地集成了特征金字塔网络,开展PCB缺陷提取. Tsai等[8 ] 结合支持向量回归与卷积神经网络,实现缺陷检测速度与精度的双重提升. Zhang等[9 ] 通过引入成本敏感残差卷积神经网络,解决了样本不平衡的问题. 在PCB缺陷工业检测中,两阶段目标检测算法虽然识别精度高,但存在资源占用率高、检测速度慢、模型体积大等问题. 为了提高检测效率,单阶段检测算法应运而生. 这类算法融合了候选区域的特征提取与预测框的定位,可以直接判断目标的类别并确定目标位置[10 ] . 常见的单阶段算法有YOLO(You Only Look Once )系列以及SSD(single shot multiBox detector)系列,它们以检测速度快、计算量小为特点. 对于PCB缺陷的检测,王永利等[11 ] 结合差分算法与卷积神经网络进行精细检测,但这两步处理策略占用了大量的计算资源. 苏佳等[12 ] 在YOLOv4模型的基础上,结合残差网络和二分K-means聚类优化初始锚框的策略,在一定程度上削减了计算量,但是聚类参数的调优过程较繁琐. 王淑青等[13 ] 将YOLOv5模型的主干网络替换为EfficientNet V2,这一改进显著提高了模型的检测速度,但小缺陷检测精度有所下降. 为了实现高速与高精度检测的平衡,Wang等[14 ] 在YOLO算法中引入混合注意力和跳跃空心空间卷积金字塔,显著增强了模型对PCB微小缺陷的识别能力,但模型尺寸较大,不利于部署. 基于上述研究可知,虽然单阶段目标检测算法具有较快的检测速度和良好的检测精度,但在微小缺陷检测方面表现不佳,且难以部署在嵌入式设备上. 本文对YOLOv5s模型的现有聚类方式和结构进行针对性改进,力求在实现检测精度与计算效率平衡的同时,满足便携式部署的需求. 本文的主要贡献如下. ...
1
... 为了提升YOLOv5s在PCB小目标缺陷检测方面的效能,本文提出创新的分层聚类算法——HDBK-means. 该算法融合了HDBSCAN(Hierarchical Density-Based Spatial Clustering of Applications with Noise )[15 ] 与二分K-means[16 ] 2种高级聚类技术. YOLOv5s原本所用的K-means算法在YOLOv5s中的应用往往受到初始聚类中心的随机性、异常值及孤立数据点的影响,导致聚类结果不稳定与不理想. 当缺陷具有不规则形状、重叠或受到噪声干扰时,采用K-means算法,无法精确地将缺陷从背景中分离出来. 采用HDBK-means算法,能够利用HDBSCAN的分层聚类技术对PCB数据集进行初步聚类处理,从而提高对复杂形状和噪声的鲁棒性. HDBSCAN是DBSCAN[17 ] 算法的扩展,它通过转化为分层聚类的方式,结合了聚类稳定性的概念,并使用了提取平面聚类的先进技术. 相较于传统的DBSCAN,HDBSCAN更擅长处理不同密度和形态的数据簇,能够有效剔除边缘数据点和孤立点的干扰,实现更卓越的聚类效果. 利用HDBSCAN算法的输出结果来确定最佳的聚类中心数量$ K $
A smoke detection model based on improved YOLOv5
1
2022
... 为了提升YOLOv5s在PCB小目标缺陷检测方面的效能,本文提出创新的分层聚类算法——HDBK-means. 该算法融合了HDBSCAN(Hierarchical Density-Based Spatial Clustering of Applications with Noise )[15 ] 与二分K-means[16 ] 2种高级聚类技术. YOLOv5s原本所用的K-means算法在YOLOv5s中的应用往往受到初始聚类中心的随机性、异常值及孤立数据点的影响,导致聚类结果不稳定与不理想. 当缺陷具有不规则形状、重叠或受到噪声干扰时,采用K-means算法,无法精确地将缺陷从背景中分离出来. 采用HDBK-means算法,能够利用HDBSCAN的分层聚类技术对PCB数据集进行初步聚类处理,从而提高对复杂形状和噪声的鲁棒性. HDBSCAN是DBSCAN[17 ] 算法的扩展,它通过转化为分层聚类的方式,结合了聚类稳定性的概念,并使用了提取平面聚类的先进技术. 相较于传统的DBSCAN,HDBSCAN更擅长处理不同密度和形态的数据簇,能够有效剔除边缘数据点和孤立点的干扰,实现更卓越的聚类效果. 利用HDBSCAN算法的输出结果来确定最佳的聚类中心数量$ K $
基于改进DBSCAN和距离共识评估的分段点云去噪方法
1
2024
... 为了提升YOLOv5s在PCB小目标缺陷检测方面的效能,本文提出创新的分层聚类算法——HDBK-means. 该算法融合了HDBSCAN(Hierarchical Density-Based Spatial Clustering of Applications with Noise )[15 ] 与二分K-means[16 ] 2种高级聚类技术. YOLOv5s原本所用的K-means算法在YOLOv5s中的应用往往受到初始聚类中心的随机性、异常值及孤立数据点的影响,导致聚类结果不稳定与不理想. 当缺陷具有不规则形状、重叠或受到噪声干扰时,采用K-means算法,无法精确地将缺陷从背景中分离出来. 采用HDBK-means算法,能够利用HDBSCAN的分层聚类技术对PCB数据集进行初步聚类处理,从而提高对复杂形状和噪声的鲁棒性. HDBSCAN是DBSCAN[17 ] 算法的扩展,它通过转化为分层聚类的方式,结合了聚类稳定性的概念,并使用了提取平面聚类的先进技术. 相较于传统的DBSCAN,HDBSCAN更擅长处理不同密度和形态的数据簇,能够有效剔除边缘数据点和孤立点的干扰,实现更卓越的聚类效果. 利用HDBSCAN算法的输出结果来确定最佳的聚类中心数量$ K $
基于改进DBSCAN和距离共识评估的分段点云去噪方法
1
2024
... 为了提升YOLOv5s在PCB小目标缺陷检测方面的效能,本文提出创新的分层聚类算法——HDBK-means. 该算法融合了HDBSCAN(Hierarchical Density-Based Spatial Clustering of Applications with Noise )[15 ] 与二分K-means[16 ] 2种高级聚类技术. YOLOv5s原本所用的K-means算法在YOLOv5s中的应用往往受到初始聚类中心的随机性、异常值及孤立数据点的影响,导致聚类结果不稳定与不理想. 当缺陷具有不规则形状、重叠或受到噪声干扰时,采用K-means算法,无法精确地将缺陷从背景中分离出来. 采用HDBK-means算法,能够利用HDBSCAN的分层聚类技术对PCB数据集进行初步聚类处理,从而提高对复杂形状和噪声的鲁棒性. HDBSCAN是DBSCAN[17 ] 算法的扩展,它通过转化为分层聚类的方式,结合了聚类稳定性的概念,并使用了提取平面聚类的先进技术. 相较于传统的DBSCAN,HDBSCAN更擅长处理不同密度和形态的数据簇,能够有效剔除边缘数据点和孤立点的干扰,实现更卓越的聚类效果. 利用HDBSCAN算法的输出结果来确定最佳的聚类中心数量$ K $
1
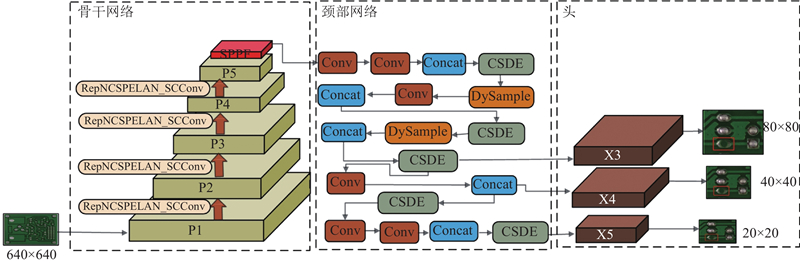
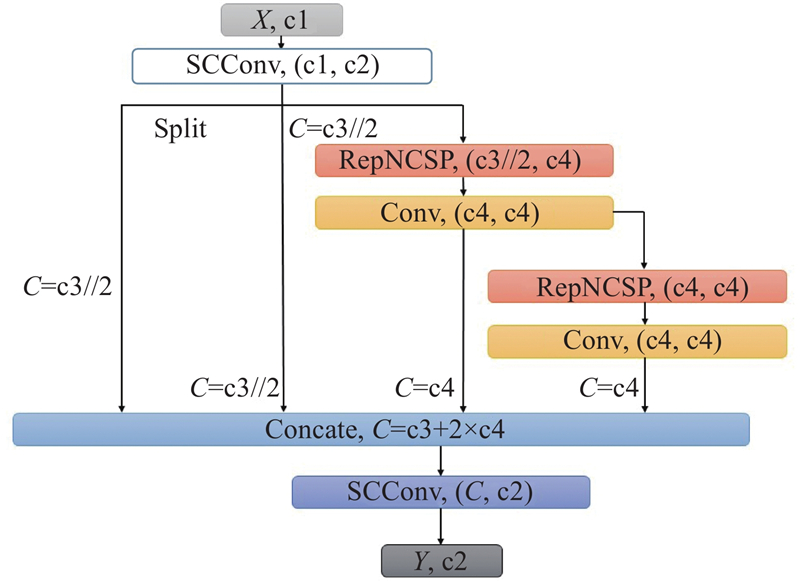
... 为了平衡YOLOv5s模型的检测速度与精度,满足便携式嵌入设备的需求,本文引入RepNCSPELAN[18 ] 模块重构主干网络,以降低模型计算量. 原本YOLOv5s算法是使用C3模块进行特征提取,但对于PCB缺陷特征提取的精细度不够高,难以充分捕捉PCB上细微或复杂的缺陷特征. 本文提出使用RepNCSPELAN_SCConv替换原本的C3模块. RepNCSPELAN采用重参数化和归一化卷积,结合Squeeze-and-Excitation和高效层聚合架构,强调在推理阶段的高效性和特征自适应增强,能够更高效地捕捉各个尺度的细节特征信息. RepNCSPELAN通过利用多个重参数归一化跨阶段连接部分(reparameterized normalized cross stage partial,RepNCSP)单元构建高效层聚合网络(efficient layer aggregation network,ELAN)结构,更有效地聚合多层特征. SCConv[19 ] 利用特征图之间的空间和通道冗余进行卷积神经网络的压缩,旨在通过减少冗余计算并提升特征学习的能力,使得模型在保持高精度的同时控制计算量. 模块的详细结构可以参考图3 . 图中,X 为输入特征,c1为输入通道数,Y 为输出特征,c2为输出通道数. 将改进后的RepNCSPELAN_SCConv应用于YOLOv5s,能够增强模型的特征提取能力,在保证高准确性的同时,提供快速的推理速度. ...
1
... 为了平衡YOLOv5s模型的检测速度与精度,满足便携式嵌入设备的需求,本文引入RepNCSPELAN[18 ] 模块重构主干网络,以降低模型计算量. 原本YOLOv5s算法是使用C3模块进行特征提取,但对于PCB缺陷特征提取的精细度不够高,难以充分捕捉PCB上细微或复杂的缺陷特征. 本文提出使用RepNCSPELAN_SCConv替换原本的C3模块. RepNCSPELAN采用重参数化和归一化卷积,结合Squeeze-and-Excitation和高效层聚合架构,强调在推理阶段的高效性和特征自适应增强,能够更高效地捕捉各个尺度的细节特征信息. RepNCSPELAN通过利用多个重参数归一化跨阶段连接部分(reparameterized normalized cross stage partial,RepNCSP)单元构建高效层聚合网络(efficient layer aggregation network,ELAN)结构,更有效地聚合多层特征. SCConv[19 ] 利用特征图之间的空间和通道冗余进行卷积神经网络的压缩,旨在通过减少冗余计算并提升特征学习的能力,使得模型在保持高精度的同时控制计算量. 模块的详细结构可以参考图3 . 图中,X 为输入特征,c1为输入通道数,Y 为输出特征,c2为输出通道数. 将改进后的RepNCSPELAN_SCConv应用于YOLOv5s,能够增强模型的特征提取能力,在保证高准确性的同时,提供快速的推理速度. ...
1
... PCB缺陷检测需要高精度地识别出细微的瑕疵和裂纹,YOLOv5s采用传统的FPN通过自顶向下的路径来融合多尺度特征,这会导致计算成本增加以及各个层间的信息交互不足. Efficient RepGFPN[20 ] 在特征融合中采用具有不同通道维度的设置来控制计算成本,删除了额外的上采样操作,能够更高效地进行多尺度特征融合. Efficient RepGFPN在特征融合中用跨阶段信息交互结构(cross-stage information interaction structure,CIIS) 替换原始的基于3×3卷积的特征融合,CIIS能够有效地交换高级语义信息和低级空间信息,提升网络对PCB各个尺度缺陷的识别精度. ...
DEA-Net: single image dehazing based on detail-enhanced convolution and content-guided attention
1
2024
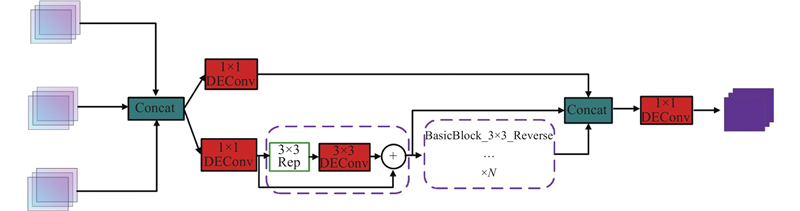
... 由于PCB表面缺陷在形态、位置、大小上呈现出极大的差异性,尤其是缺口、多焊及断路缺陷,为了进一步提升网络的学习效率并增强对细节特征信息的提取,设计全新的跨阶段细节增强交互模块(cross-stage detail enhancement interaction module,CSDE),结构如图4 所示. 图中,Concat为连接操作,DEConv为细节增强卷积,Rep为重参数化过程,BasicBlock_Revers为特征提取模块. CSDE将原CIIS模块中所有的Conv模块均替换为更高效的细节增强卷积(detail-enhanced convolution,DEConv)[21 ] 模块. DEConv通过5个卷积层并行部署用于特征提取,利用卷积层的可加性将并行部署的卷积简化为单个标准卷积以节省计算量,并提取更丰富的PCB缺陷细节特征. 通过这一改进最终所形成的RDEGFPN结构能够更好地适应 PCB 表面缺陷的复杂性和多样性,提升整个网络在 PCB 缺陷检测任务中的性能. ...
1
... 在YOLOv5s的网络结构中,原本所使用的上采样方式基于简单的像素插值,忽视了特征图中蕴含的丰富语义信息. 此外,因精度受限和插值方法的局限性,难以精确重建缺陷的细微特征. 为了满足PCB缺陷检测的需求,提出在模型中引入动态上采样DySample[22 ] . DySample 采用点采样的方法实现动态上采样,规避了传统的基于内核的动态上采样方法中常见的复杂动态卷积和子网络构建过程,显著减少了参数量. 通过基于动态卷积和点采样的方法,上采样器能够更有效地利用特征图的语义信息而减少信息损失,同时减少计算量和GPU内存需求. 结合动态上采样算子DySample与RDEGFPN网络,形成新的广义动态特征融合金字塔——GDFPN,具体的网络结构如图1 所示. ...
Small-sample underwater target detection: a joint approach utilizing diffusion and YOLOv7 model
1
2023
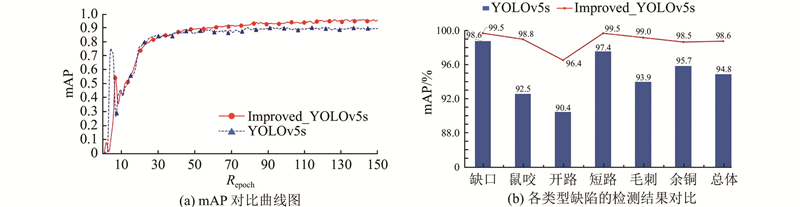
... 为了验证所提出的Improved_YOLOv5s模型的性能,选取YOLO系列如YOLOv7n[23 ] 、YOLOv8n[24 ] 等以及其他最新进行PCB表面缺陷检测的文献算法,在自建的PCB缺陷数据集上进行实验训练与评估对比. 对比指标包括检测精度、速度、参数量和模型体积等,以验证该模型在各项关键性能上的优势. 具体来说,在mAP方面,本文算法较Xiao[25 ] 、Zhou[26 ] 、Yuan[27 ] 、Tang[28 ] 和Du[29 ] 等提出的算法分别提升了2.8%、2.1%、1.3%、3.1%和2.2%,较选取的2种YOLO模型分别提高了3.3%和4.8%,达到了所有算法中最高的98.6%. 在检测速度方面,本文算法在服务器端的表现尤为突出,较文献[25 ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
A lightweight YOLOv8 integrating FasterNet for real-time underwater object detection
1
2024
... 为了验证所提出的Improved_YOLOv5s模型的性能,选取YOLO系列如YOLOv7n[23 ] 、YOLOv8n[24 ] 等以及其他最新进行PCB表面缺陷检测的文献算法,在自建的PCB缺陷数据集上进行实验训练与评估对比. 对比指标包括检测精度、速度、参数量和模型体积等,以验证该模型在各项关键性能上的优势. 具体来说,在mAP方面,本文算法较Xiao[25 ] 、Zhou[26 ] 、Yuan[27 ] 、Tang[28 ] 和Du[29 ] 等提出的算法分别提升了2.8%、2.1%、1.3%、3.1%和2.2%,较选取的2种YOLO模型分别提高了3.3%和4.8%,达到了所有算法中最高的98.6%. 在检测速度方面,本文算法在服务器端的表现尤为突出,较文献[25 ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
PCB defect detection algorithm based on CDI-YOLO
3
2024
... 为了验证所提出的Improved_YOLOv5s模型的性能,选取YOLO系列如YOLOv7n[23 ] 、YOLOv8n[24 ] 等以及其他最新进行PCB表面缺陷检测的文献算法,在自建的PCB缺陷数据集上进行实验训练与评估对比. 对比指标包括检测精度、速度、参数量和模型体积等,以验证该模型在各项关键性能上的优势. 具体来说,在mAP方面,本文算法较Xiao[25 ] 、Zhou[26 ] 、Yuan[27 ] 、Tang[28 ] 和Du[29 ] 等提出的算法分别提升了2.8%、2.1%、1.3%、3.1%和2.2%,较选取的2种YOLO模型分别提高了3.3%和4.8%,达到了所有算法中最高的98.6%. 在检测速度方面,本文算法在服务器端的表现尤为突出,较文献[25 ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
... 等提出的算法分别提升了2.8%、2.1%、1.3%、3.1%和2.2%,较选取的2种YOLO模型分别提高了3.3%和4.8%,达到了所有算法中最高的98.6%. 在检测速度方面,本文算法在服务器端的表现尤为突出,较文献[25 ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
... Comparison of detection results between different literature algorithms and YOLO series algorithms
Tab.4 算法 P /%mAP/% S /MBFLOPs/109 v /(帧·s−1 )服务器 RK3568 文献[25 ]算法 93.2 95.8 5.8 12.6 128.0 46.1 文献[26 ]算法 94.7 96.5 3.8 5.2 88.4 20.5 文献[27 ]算法 93.9 97.3 10.5 11.8 137.8 63.8 文献[28 ]算法 91.6 95.5 92.3 41.4 92.5 21.4 文献[29 ]算法 93.2 96.4 20.1 12.8 48.9 11.3 YOLOv5s 96.3 94.8 13.4 15.8 128.4 52.2 YOLOv7-tiny 98.4 95.3 6.03 10.2 82.5 19.8 YOLOv8n 96.7 93.8 5.96 8.2 134.8 56.1 Improved_YOLOv5s 99.2 98.6 9.8 12.8 138.1 66.1
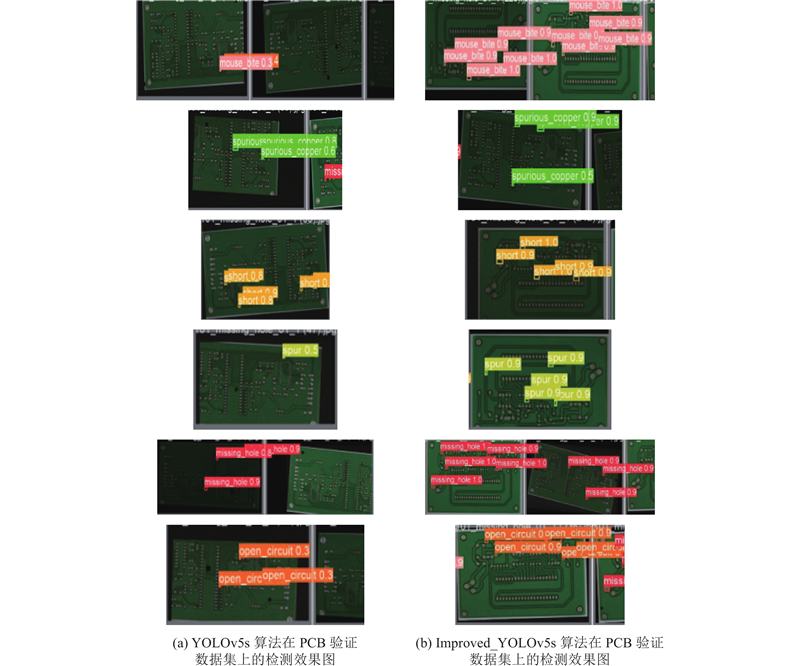
如图8 (a)、(b)所示为YOLOv5s算法和Improved_YOLOv5s算法的检测性能. 选取包含6种缺陷类型的PCB验证数据集,分别对2种算法进行测试. 从图8 (a)可以看出,YOLOv5s模型容易产生漏检且对各个缺陷的检测准确率都较低,如鼠咬精度仅为0.30~0.40,开路精度仅为0.3. 从图8 (b)可以看出,利用Improved_YOLOv5s模型,可以将鼠咬精度提高至0.90~1.00,开路精度提高至0.9,并且在检测6种缺陷位置时均优于YOLOv5s算法,大部分准确率均保持为90%~100%. ...
Lightweight PCB defect detection algorithm based on MSD-YOLO
2
2023
... 为了验证所提出的Improved_YOLOv5s模型的性能,选取YOLO系列如YOLOv7n[23 ] 、YOLOv8n[24 ] 等以及其他最新进行PCB表面缺陷检测的文献算法,在自建的PCB缺陷数据集上进行实验训练与评估对比. 对比指标包括检测精度、速度、参数量和模型体积等,以验证该模型在各项关键性能上的优势. 具体来说,在mAP方面,本文算法较Xiao[25 ] 、Zhou[26 ] 、Yuan[27 ] 、Tang[28 ] 和Du[29 ] 等提出的算法分别提升了2.8%、2.1%、1.3%、3.1%和2.2%,较选取的2种YOLO模型分别提高了3.3%和4.8%,达到了所有算法中最高的98.6%. 在检测速度方面,本文算法在服务器端的表现尤为突出,较文献[25 ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
... Comparison of detection results between different literature algorithms and YOLO series algorithms
Tab.4 算法 P /%mAP/% S /MBFLOPs/109 v /(帧·s−1 )服务器 RK3568 文献[25 ]算法 93.2 95.8 5.8 12.6 128.0 46.1 文献[26 ]算法 94.7 96.5 3.8 5.2 88.4 20.5 文献[27 ]算法 93.9 97.3 10.5 11.8 137.8 63.8 文献[28 ]算法 91.6 95.5 92.3 41.4 92.5 21.4 文献[29 ]算法 93.2 96.4 20.1 12.8 48.9 11.3 YOLOv5s 96.3 94.8 13.4 15.8 128.4 52.2 YOLOv7-tiny 98.4 95.3 6.03 10.2 82.5 19.8 YOLOv8n 96.7 93.8 5.96 8.2 134.8 56.1 Improved_YOLOv5s 99.2 98.6 9.8 12.8 138.1 66.1
如图8 (a)、(b)所示为YOLOv5s算法和Improved_YOLOv5s算法的检测性能. 选取包含6种缺陷类型的PCB验证数据集,分别对2种算法进行测试. 从图8 (a)可以看出,YOLOv5s模型容易产生漏检且对各个缺陷的检测准确率都较低,如鼠咬精度仅为0.30~0.40,开路精度仅为0.3. 从图8 (b)可以看出,利用Improved_YOLOv5s模型,可以将鼠咬精度提高至0.90~1.00,开路精度提高至0.9,并且在检测6种缺陷位置时均优于YOLOv5s算法,大部分准确率均保持为90%~100%. ...
LW-YOLO: lightweight deep learning model for fast and precise defect detection in printed circuit boards
2
2024
... 为了验证所提出的Improved_YOLOv5s模型的性能,选取YOLO系列如YOLOv7n[23 ] 、YOLOv8n[24 ] 等以及其他最新进行PCB表面缺陷检测的文献算法,在自建的PCB缺陷数据集上进行实验训练与评估对比. 对比指标包括检测精度、速度、参数量和模型体积等,以验证该模型在各项关键性能上的优势. 具体来说,在mAP方面,本文算法较Xiao[25 ] 、Zhou[26 ] 、Yuan[27 ] 、Tang[28 ] 和Du[29 ] 等提出的算法分别提升了2.8%、2.1%、1.3%、3.1%和2.2%,较选取的2种YOLO模型分别提高了3.3%和4.8%,达到了所有算法中最高的98.6%. 在检测速度方面,本文算法在服务器端的表现尤为突出,较文献[25 ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
... Comparison of detection results between different literature algorithms and YOLO series algorithms
Tab.4 算法 P /%mAP/% S /MBFLOPs/109 v /(帧·s−1 )服务器 RK3568 文献[25 ]算法 93.2 95.8 5.8 12.6 128.0 46.1 文献[26 ]算法 94.7 96.5 3.8 5.2 88.4 20.5 文献[27 ]算法 93.9 97.3 10.5 11.8 137.8 63.8 文献[28 ]算法 91.6 95.5 92.3 41.4 92.5 21.4 文献[29 ]算法 93.2 96.4 20.1 12.8 48.9 11.3 YOLOv5s 96.3 94.8 13.4 15.8 128.4 52.2 YOLOv7-tiny 98.4 95.3 6.03 10.2 82.5 19.8 YOLOv8n 96.7 93.8 5.96 8.2 134.8 56.1 Improved_YOLOv5s 99.2 98.6 9.8 12.8 138.1 66.1
如图8 (a)、(b)所示为YOLOv5s算法和Improved_YOLOv5s算法的检测性能. 选取包含6种缺陷类型的PCB验证数据集,分别对2种算法进行测试. 从图8 (a)可以看出,YOLOv5s模型容易产生漏检且对各个缺陷的检测准确率都较低,如鼠咬精度仅为0.30~0.40,开路精度仅为0.3. 从图8 (b)可以看出,利用Improved_YOLOv5s模型,可以将鼠咬精度提高至0.90~1.00,开路精度提高至0.9,并且在检测6种缺陷位置时均优于YOLOv5s算法,大部分准确率均保持为90%~100%. ...
PCB-YOLO: an improved detection algorithm of PCB surface defects based on YOLOv5
2
2023
... 为了验证所提出的Improved_YOLOv5s模型的性能,选取YOLO系列如YOLOv7n[23 ] 、YOLOv8n[24 ] 等以及其他最新进行PCB表面缺陷检测的文献算法,在自建的PCB缺陷数据集上进行实验训练与评估对比. 对比指标包括检测精度、速度、参数量和模型体积等,以验证该模型在各项关键性能上的优势. 具体来说,在mAP方面,本文算法较Xiao[25 ] 、Zhou[26 ] 、Yuan[27 ] 、Tang[28 ] 和Du[29 ] 等提出的算法分别提升了2.8%、2.1%、1.3%、3.1%和2.2%,较选取的2种YOLO模型分别提高了3.3%和4.8%,达到了所有算法中最高的98.6%. 在检测速度方面,本文算法在服务器端的表现尤为突出,较文献[25 ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
... Comparison of detection results between different literature algorithms and YOLO series algorithms
Tab.4 算法 P /%mAP/% S /MBFLOPs/109 v /(帧·s−1 )服务器 RK3568 文献[25 ]算法 93.2 95.8 5.8 12.6 128.0 46.1 文献[26 ]算法 94.7 96.5 3.8 5.2 88.4 20.5 文献[27 ]算法 93.9 97.3 10.5 11.8 137.8 63.8 文献[28 ]算法 91.6 95.5 92.3 41.4 92.5 21.4 文献[29 ]算法 93.2 96.4 20.1 12.8 48.9 11.3 YOLOv5s 96.3 94.8 13.4 15.8 128.4 52.2 YOLOv7-tiny 98.4 95.3 6.03 10.2 82.5 19.8 YOLOv8n 96.7 93.8 5.96 8.2 134.8 56.1 Improved_YOLOv5s 99.2 98.6 9.8 12.8 138.1 66.1
如图8 (a)、(b)所示为YOLOv5s算法和Improved_YOLOv5s算法的检测性能. 选取包含6种缺陷类型的PCB验证数据集,分别对2种算法进行测试. 从图8 (a)可以看出,YOLOv5s模型容易产生漏检且对各个缺陷的检测准确率都较低,如鼠咬精度仅为0.30~0.40,开路精度仅为0.3. 从图8 (b)可以看出,利用Improved_YOLOv5s模型,可以将鼠咬精度提高至0.90~1.00,开路精度提高至0.9,并且在检测6种缺陷位置时均优于YOLOv5s算法,大部分准确率均保持为90%~100%. ...
YOLO-MBBi: PCB surface defect detection method based on enhanced YOLOv5
3
2023
... 为了验证所提出的Improved_YOLOv5s模型的性能,选取YOLO系列如YOLOv7n[23 ] 、YOLOv8n[24 ] 等以及其他最新进行PCB表面缺陷检测的文献算法,在自建的PCB缺陷数据集上进行实验训练与评估对比. 对比指标包括检测精度、速度、参数量和模型体积等,以验证该模型在各项关键性能上的优势. 具体来说,在mAP方面,本文算法较Xiao[25 ] 、Zhou[26 ] 、Yuan[27 ] 、Tang[28 ] 和Du[29 ] 等提出的算法分别提升了2.8%、2.1%、1.3%、3.1%和2.2%,较选取的2种YOLO模型分别提高了3.3%和4.8%,达到了所有算法中最高的98.6%. 在检测速度方面,本文算法在服务器端的表现尤为突出,较文献[25 ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
... ~29 ]算法分别提升了20、45.6、2.3、44.7、54.8及13.9帧/s,较选取的2种YOLO模型分别提高了46.3和10帧/s,达到了所有算法中最快的138.1 帧/s. 即使在嵌入式设备上,本文算法的检测速度也达到了66.1 帧/s,在所有算法中最快,且检测效果与在服务器端相同,满足工业部署时信息采集的鲁棒性、检测实时性及轻量级便携部署的要求. 在模型参数量和体积方面,本文算法通过优化模型结构,降低了模型的参数量和体积,较原始模型分别降低了19.0%和26.8%,实现了轻量级便携部署. 以上几种不同模型的对比实验结果如表4 所示. 其中,v 为检测速度. ...
... Comparison of detection results between different literature algorithms and YOLO series algorithms
Tab.4 算法 P /%mAP/% S /MBFLOPs/109 v /(帧·s−1 )服务器 RK3568 文献[25 ]算法 93.2 95.8 5.8 12.6 128.0 46.1 文献[26 ]算法 94.7 96.5 3.8 5.2 88.4 20.5 文献[27 ]算法 93.9 97.3 10.5 11.8 137.8 63.8 文献[28 ]算法 91.6 95.5 92.3 41.4 92.5 21.4 文献[29 ]算法 93.2 96.4 20.1 12.8 48.9 11.3 YOLOv5s 96.3 94.8 13.4 15.8 128.4 52.2 YOLOv7-tiny 98.4 95.3 6.03 10.2 82.5 19.8 YOLOv8n 96.7 93.8 5.96 8.2 134.8 56.1 Improved_YOLOv5s 99.2 98.6 9.8 12.8 138.1 66.1
如图8 (a)、(b)所示为YOLOv5s算法和Improved_YOLOv5s算法的检测性能. 选取包含6种缺陷类型的PCB验证数据集,分别对2种算法进行测试. 从图8 (a)可以看出,YOLOv5s模型容易产生漏检且对各个缺陷的检测准确率都较低,如鼠咬精度仅为0.30~0.40,开路精度仅为0.3. 从图8 (b)可以看出,利用Improved_YOLOv5s模型,可以将鼠咬精度提高至0.90~1.00,开路精度提高至0.9,并且在检测6种缺陷位置时均优于YOLOv5s算法,大部分准确率均保持为90%~100%. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}