

为了减少交通事故的发生,高级辅助驾驶系统(如主动避障辅助)越来越受到汽车行业的关注[1]. 随着人工智能的兴起,许多学者基于机器学习的方法开展了关于车辆避障系统的研究. Zong等[2]提出改进的深度确定性策略梯度算法来获得连续的转向角和加速度,进而控制车辆以更加合理的路径避障. 房亮等[3]基于长短时记忆网络模型,以相对距离、相对速度作为输入,建立智能车辆的避障模型. 基于规则/场景的避障控制算法可靠性高,相关的研究较多. Wang等[4]提出的避障框架通过生成符合道路规则和几何约束的理想避障轨迹,并基于模型预测控制建立路径跟踪控制器来有效地避免碰撞. 在保证目标总势场为最小值的前提下,Guo等[5]提出改进的人工势场方法,并使用基于自适应神经网络的反步轨迹跟踪方法,跟踪实时生成的无碰撞轨迹. Lee等[6]提出基于相对位置、速度和加速度计算周围车辆潜在风险的预测占用图(predictive occupancy map, POM),在经过POM的12个局部轨迹中选择风险水平最低的轨迹,规划出考虑车辆稳定性的横向和纵向加速度. 为了协调车辆行驶中避免追尾碰撞和保持车辆稳定的冲突,Cui等[1]提出由自主转向和差动制动组成的转向辅助系统,系统使用前馈控制得到期望前轮转角,节约了先规划轨迹后跟踪的时间成本. 基于学习的控制系统具有广阔的发展前景,基于规则的控制算法具有更高的可靠性,但两者均未考虑驾驶特征的不同,导致驾驶员对系统的接受度不高[7].
当自动驾驶汽车的风格与驾驶员自己的驾驶风格相一致时,驾驶员对自动驾驶汽车的信任和接受程度会显著提高[8]. Navon–Eyal等[9]通过数据采集与分析,发现驾驶风格与驾驶员的情绪、性格、年龄有很大关系. 其他研究也表明,驾驶风格是动态的,受个性和驾驶条件的影响[10]. 为此,Sun等[11]提出具有仲裁机制的双层多维高斯隐马尔可夫过程在线驾驶风格识别方法,该方法能够实现超过95%的在线识别准确率. 针对车辆控制问题,Li等[12]采用人工势场(artificial potential field, APF)方法对交通环境和驾驶方式进行建模,将APF集成到模型预测控制设计中,以此将人们的驾驶习惯和驾驶风格融入控制器,使被控车辆能够在交通环境和人类驾驶风格的影响下运动. 董俊一[13]考虑驾驶员驾驶风格波动特性和追求换道效益最大化,研究了智能驾驶车辆换道决策建模方法. Li等[14]基于安全评估模块提出具有驾驶风格偏好的避障策略,可以满足不同消费者的需求,提高了司机对自动驾驶汽车的接受程度.
1. 车辆模型
1.1. 八自由度车辆模型
图 1
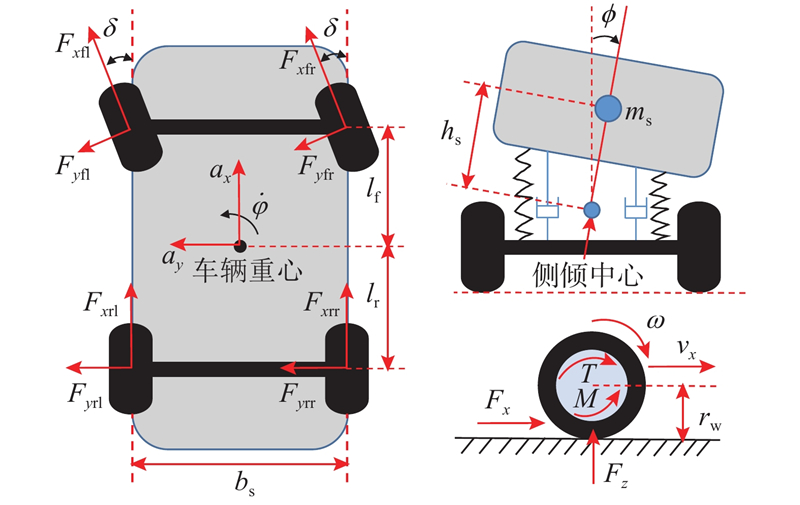
4个车轮的旋转动力学模型分别为
式中:
1.2. 轮胎模型
轮胎是连接车身与道路的唯一媒介,轮胎模型的精度直接影响仿真结果. 采用魔术公式轮胎模型计算轮胎的纵侧向力[16],计算式为
式中:
2. 驾驶风格估计
确定驾驶风格有2种方法:主观问卷调查和客观数据分析. Eboli等[17]发现驾驶风格的自我定义不可靠,通过驾驶数据提供的客观度量来定义驾驶风格更具说服力. 本研究离线采集不同风格驾驶员的驾驶数据,根据聚类和数据分析结果确定对应风格,得到车辆状态-驾驶风格关联样本库,据此训练在线分类器.
2.1. 数据采集
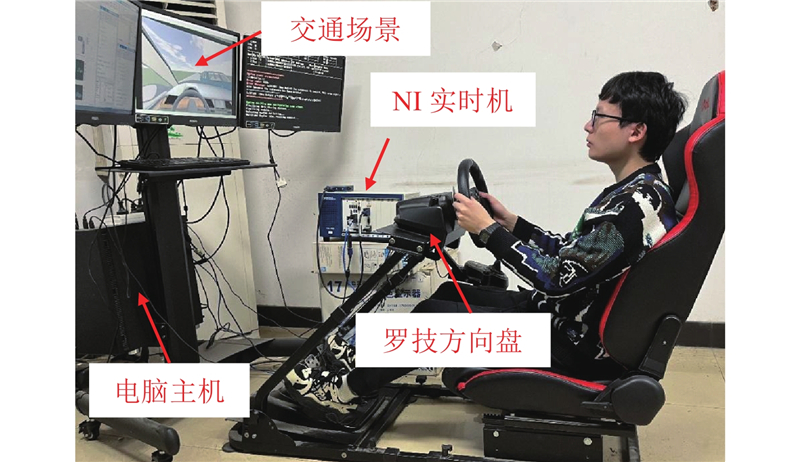
驾驶风格的研究依赖良好的道路试验数据,由于避障工况的危险性,无法进行实车试验,为此建立由罗技G29方向盘、带有PXI-8513 CAN接口模块的NI实时系统机箱、个人计算机(PC)3个部分组成的模拟驾驶平台. 该平台在PC上构建虚拟双车道避障场景,并将Carsim车辆模型作为被控车辆加载到NI实时系统中,驾驶员通过外接的方向盘进行模拟驾驶. 驾驶模拟器构成如图2所示. 针对高速公路的行车特点,通过问卷调查和分析[18]对136位报名者的驾驶风格进行粗略估计,从中招募参与者20名,男女比例为7∶3,基本符合中国驾驶员男女比例关系[19]. 参与者均持有C1以上驾驶证,其中驾驶风格为稳健性、正常型、激进型的比例为1∶2∶1. 经过练习,志愿者达到日常驾车水准后,在不同车速和障碍物距离下多次操纵模拟器完成避障,对于避障失败或参与者认为不符合控制风格的数据不予保留,最终采集有效驾驶数据3 039组.
图 2
2.2. 风格聚类
2.2.1. 数据预处理
特征的选择影响驾驶风格聚类效果. 经过对驾驶数据的分析与处理,得到15个特征量. 使用全部特征量作为聚类数据不但不能很好表征避障工况下的驾驶风格,而且会加大计算难度[20]. 在所获得的特征量中,车辆最大侧向加速度
2.2.2. K均值聚类
数据聚类是常见的无监督学习方法,可以根据数据点的相似度与相异度将数据分割成不同的簇[21],其中K均值(K-means)聚类算法常见并被广泛使用. 本研究以欧氏距离为度量策略,选用K-means++算法对各避障工况下的多组数据分别进行聚类处理,得到若干个数据簇. 簇内成员越紧密,该簇的畸变程度越低,且会随着类别的增加而降低;对于有一定区分度的数据,当畸变程度达到某个临界点时,其下降速度将会显著降低,这个临界点可视为聚类性能较好的点. 如图3所示为障碍物距离为43~47 m时,不同车速v的驾驶数据聚类畸变程度随聚类数量的变化图,当簇的个数K=3时,畸变程度
图 3
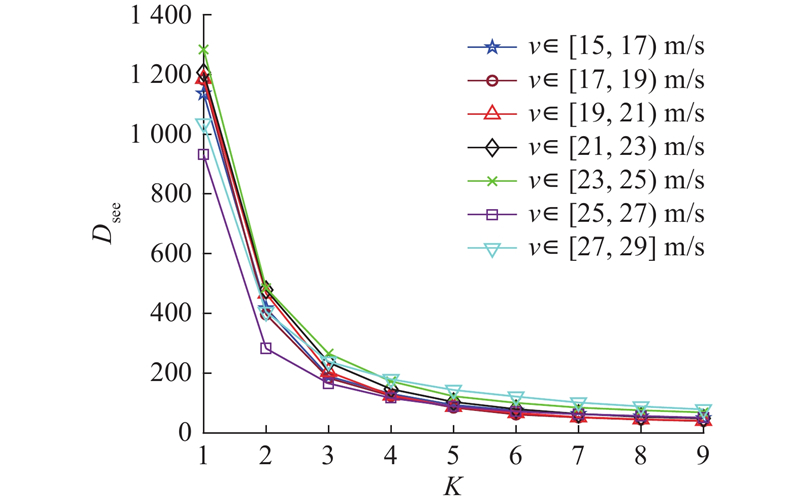
图 3 不同聚类数量下的数据畸变程度
Fig.3 Distortion degree of data under different number of clusters
图 4
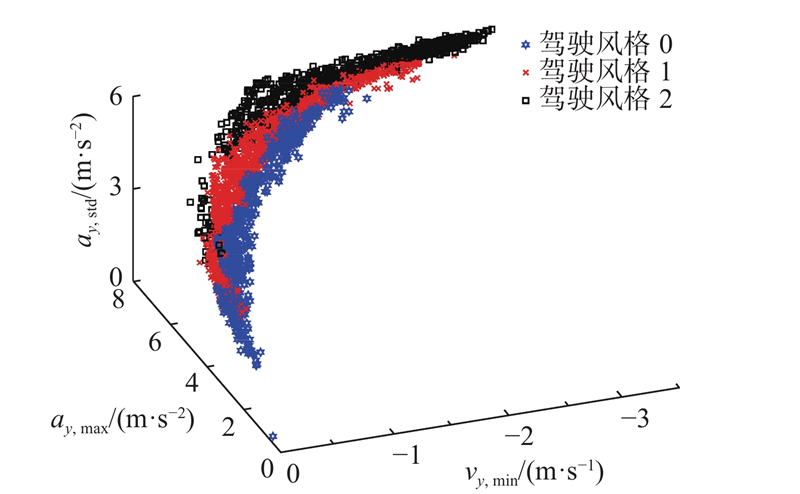
2.3. 数据分析
图 5
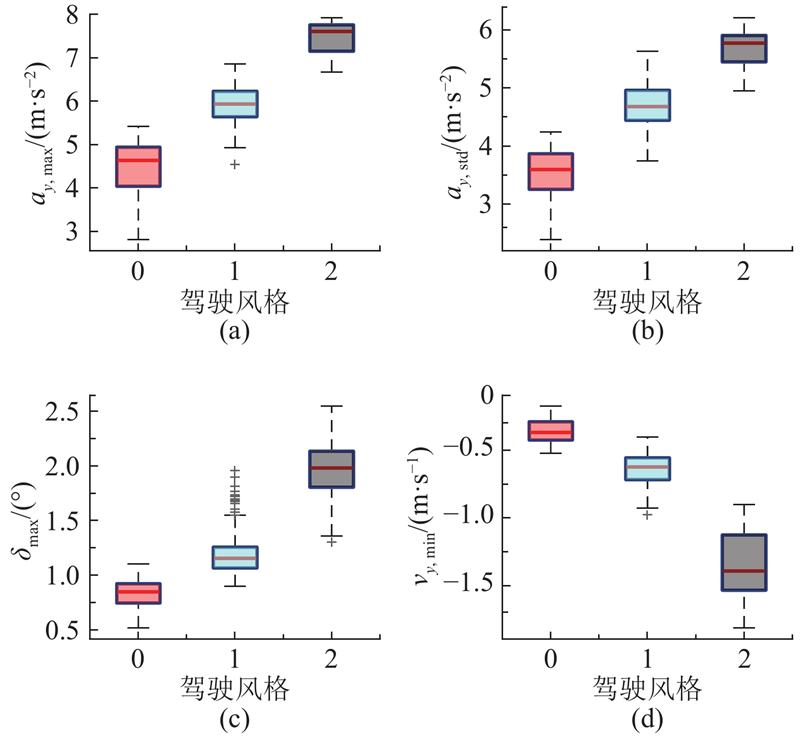
图 5 不同驾驶风格的主要特征参数对比图
Fig.5 Comparison of major features of different driving styles
2.4. 分类器训练
通过风格聚类与结果分析,可以确定驾驶数据对应的驾驶风格,得到车辆状态-驾驶风格关联样本库. 为了实现驾驶风格在线识别,须进行分类器训练. 根据实际意义和分类效果在众多特征量中选择最小侧向速度、纵向平均车速、最大前轮转角、横向位移、纵向位移、侧向加速度的最大值及其标准差、最大和最小增速共9个能够表达驾驶风格的特征量[21-24],分别采用不同的分类算法,训练出多个分类模型并进行测试与对比,模型的准确率
表 1 各驾驶风格分类算法结果
Tab.1
| 分类模型 | Acc/% | F1/% | AUC/% |
| 最近邻 | 88.04 | 88.05 | 96.75 |
| 逻辑回归 | 90.01 | 89.94 | 98.70 |
| 决策树 | 88.80 | 88.95 | 91.60 |
| 梯度提升 | 94.07 | 94.16 | 99.30 |
| 自适应增强 | 75.52 | 73.24 | 86.76 |
| 随机森林 | 93.63 | 93.71 | 99.40 |
| 高斯朴素贝叶斯 | 64.65 | 65.43 | 83.92 |
| 线性判别分析 | 88.04 | 87.81 | 97.97 |
| 二次判别分析 | 84.96 | 85.16 | 95.74 |
| 支持向量机 | 94.40 | 94.32 | 99.40 |
图 6
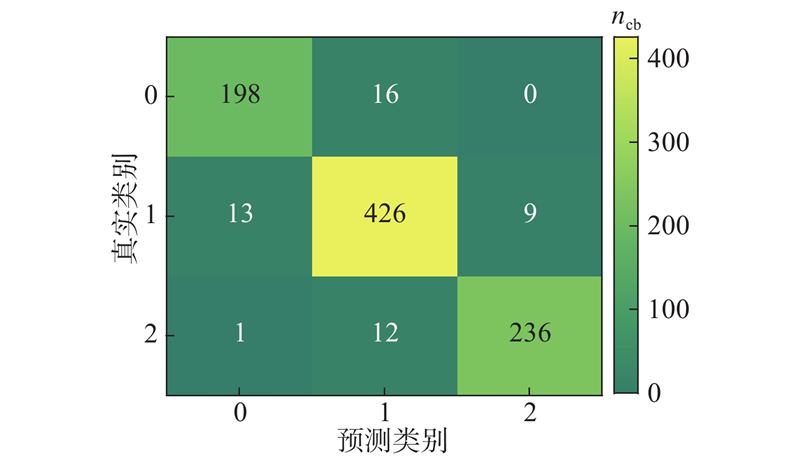
图 6 支持向量机分类器测试集混淆矩阵
Fig.6 Confusion matrix of support vector machine classifier test set
3. 控制器设计
图 7
图 8
3.1. 转向避障阶段
转向避障阶段要求车辆以符合驾驶风格的操作进入相邻车道以避免碰撞,因此选取适当的车辆状态参数来体现系统的驾驶风格至关重要. Deng等[21]提取最大侧向加速度作为代表驾驶风格的关键指标并详细叙述了选取原因. 在本研究中,采集得到的数据集能够充分证明驾驶风格与侧向加速度的密切关系,因此以车辆前轮转角为输入量,控制车辆达到相应驾驶风格对应的理想最大侧向加速度
考虑到轮胎的非线性和计算成本,在转向避障阶段使用前馈-反馈方法求解前轮转角. 轮胎侧向力与车辆的侧向加速度有关,在满足稳态转弯的条件下,将所需的前馈轮胎力简化为
式中:
根据轮胎侧偏角公式,得到避障所需前轮转向角为
3.2. 恢复稳定阶段
自车脱离碰撞的危险后,控制器基于模型预测控制算法跟踪相邻车道的中心线[26]. 基于前轮转角较小和线性轮胎模型假设,建立考虑轮胎滑移的三自由度车辆动力学模型,描述车辆的纵向、横向和横摆的动力学关系,用于模型预测控制器的搭建,车辆参数与8DOF模型的相同,动力学表达式为
式中:
式中:
时域内的状态量和系统输出量预测计算式为
前轮转角的最优算法计算式为
式中:
3.3. 切换准则设计
图 9
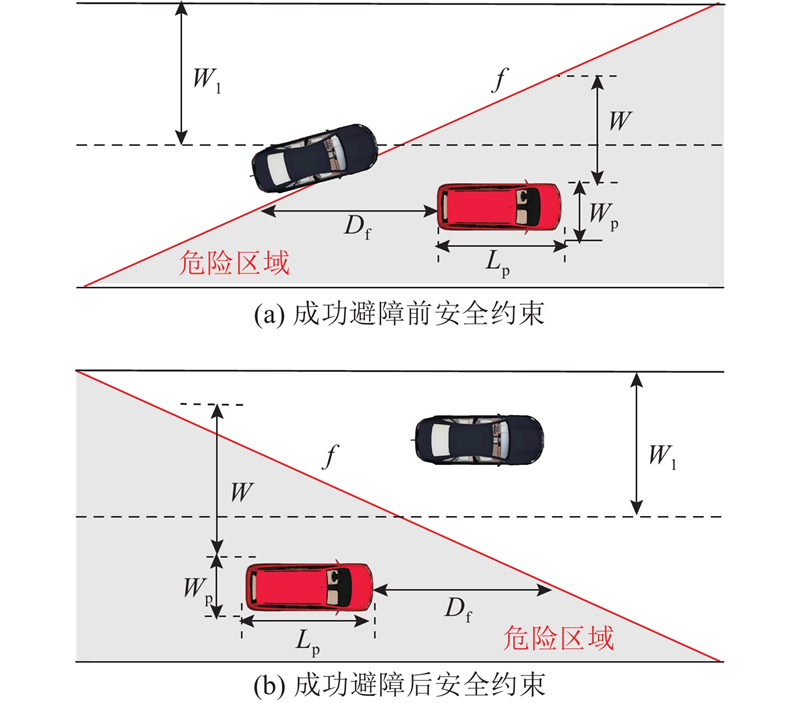
图 9 避障安全约束示意图
Fig.9 Schematic diagram of collision avoidance safety constraint
式中:
式中:
3.4. 稳定性约束设计
驾驶员驾驶风格的两段式避障控制系统需要车辆处于可控域内,为此在控制系统中加入直接横摆力矩控制器,以兼顾车辆的避障安全性和横摆稳定性[15].
在避障阶段,车辆稳定性和避障能力均应被考虑. 为了成功避障,参考横摆角速度由期望侧向加速度确定,表达式为
仅考虑车辆稳定性,参考横摆角速度的表达式为
式中:
在回稳阶段,车辆已经脱离碰撞风险,此时车辆稳定性尤为重要. 此阶段参考横摆角速度与线性二自由度车辆模型的传统参考横摆角速度相同:
结合2个阶段修正的参考横摆角速度,最终的参考横摆角速度表达式为
滑模控制(sliding mode control, SMC)方法具有响应速度快,对参数及外界扰动不敏感的特点,因此使用SMC计算横摆力矩,以跟踪式(19)的参考横摆角速度[29]. 控制误差为实际横摆角速度与理想横摆角速度之差,即
为了使系统在存在扰动和不确定情况下仍能平稳地到达滑模面,在切换函数中引入恒定边界层,最终期望横摆力矩表达式为
式中:
当
4. 结果和讨论
4.1. 仿真实验验证
为了测试所提控制算法的有效性,在Matlab/Simulink仿真环境中,对比Cui等[1]的研究,仿真与评估2种典型工况下的避障策略. 考虑到车辆在干燥路面上的情况,设路面附着系数
当纵向车速为20 m/s时,考虑不同驾驶风格做出的避障轨迹和未考虑驾驶风格的避障控制轨迹之间的差别如图10所示,2种控制器输出的前轮转角和相应的侧向加速度对比分别如图11和图12所示. 可以看出,在3种不同风格的控制器中,稳健型驾驶风格对应的最大侧向加速度最小,避障过程中距离障碍车辆最近;激进型驾驶风格对应的侧向加速度最大,与障碍车辆之间的距离最大. 原因是在避障过程中,稳健型驾驶员倾向于较小的侧向加速度增速和极值,更小的障碍物距离和较多的驾驶舒适性;激进型驾驶员追求快速躲避障碍车;正常型驾驶员的操作介于稳健和激进之间. 普通避障算法在相同工况下未考虑驾驶员的风格,避障操作主要由自车与障碍车之间的相对速度和相对距离决定,在设定的安全距离参数下,控制器的避障操作和避障路径介于稳健型和正常型之间,更偏向于稳健型. 原因是在普通避障算法中,驾驶员不能像自动驾驶系统一样准确获得环境信息,较大的前轮转角能够确保车辆避开障碍物.
图 10
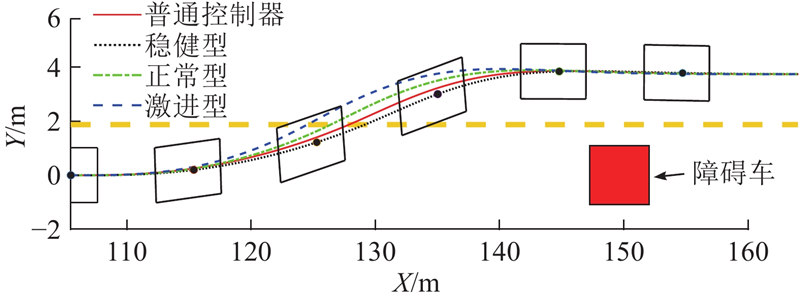
图 10 不同避障算法的避障轨迹对比图(vx =20 m/s)
Fig.10 Comparison of trajectories for different obstacle avoidance algorithms (vx=20 m/s)
图 11
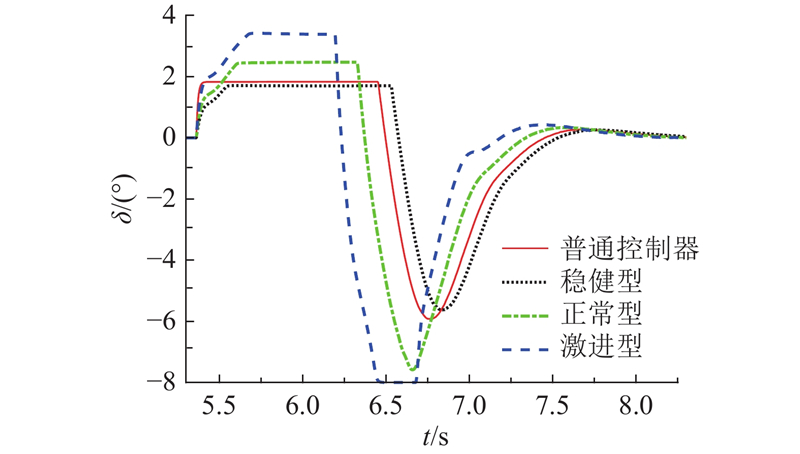
图 11 不同避障算法的前轮转角对比图(vx =20 m/s)
Fig.11 Comparison of front wheel angle for different obstacle avoidance algorithms (vx=20 m/s)
图 12

图 12 不同避障算法的侧向加速度对比图(vx =20 m/s)
Fig.12 Comparison of lateral acceleration for different obstacle avoidance algorithms (vx=20 m/s)
如图13所示,在纵向车速为24 m/s的工况下,普通控制器的避障操作更趋近于正常型的驾驶风格,由于没有进行侧向加速度增速约束,避障轨迹基本与激进型重合. 原因是在较高的车辆速度下,为了避免车辆前轮转角过大导致不舒适甚至车辆失控,驾驶员将采取相对保守的风格. 也就是说,以驾驶员实际驾驶数据为参考,传统未考虑驾驶风格的控制器在不同工况下对应着不同的驾驶风格,不能满足驾驶员对控制器风格的偏好. 如图14和图15所示分别为自车速度24 m/s时,2种控制器输出的前轮转角和相应的侧向加速度对比图. 可以看出,车辆在正常行驶中发现障碍车辆,开始向左转向,在避开障碍车后切换为车道保持控制器,跟踪相邻车道中心线. Cui等[1]的控制器、稳健型和正常型驾驶员在转向避障阶段中,期望的最大侧向加速度小于
图 13
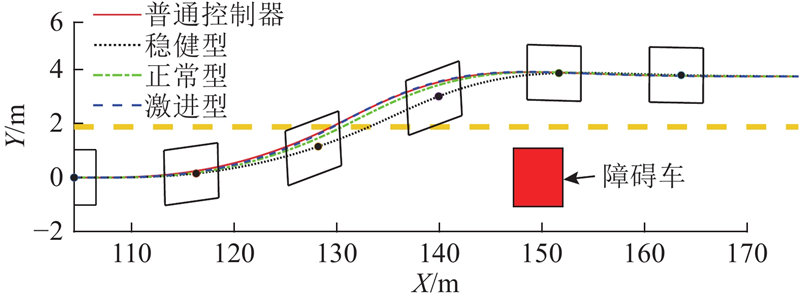
图 13 不同避障算法的避障轨迹对比图(vx =24 m/s)
Fig.13 Comparison of trajectories for different obstacle avoidance algorithms (vx=24 m/s)
图 14
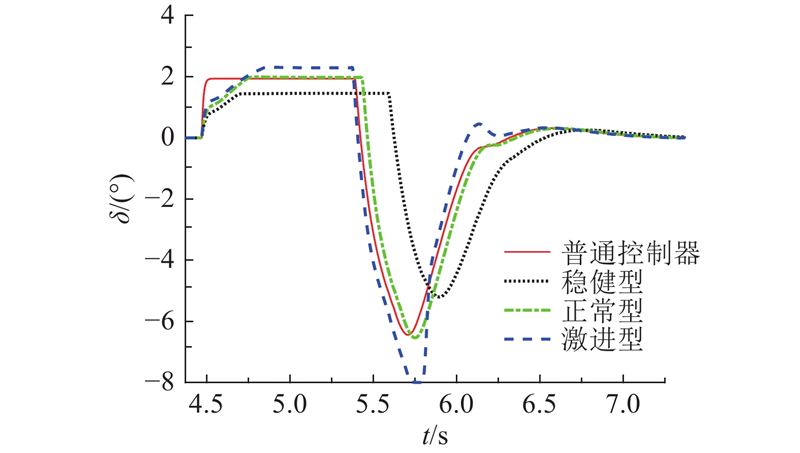
图 14 不同避障算法的前轮转角对比图(vx =24 m/s)
Fig.14 Comparison of front wheel angle for different obstacle avoidance algorithms (vx=24 m/s)
图 15
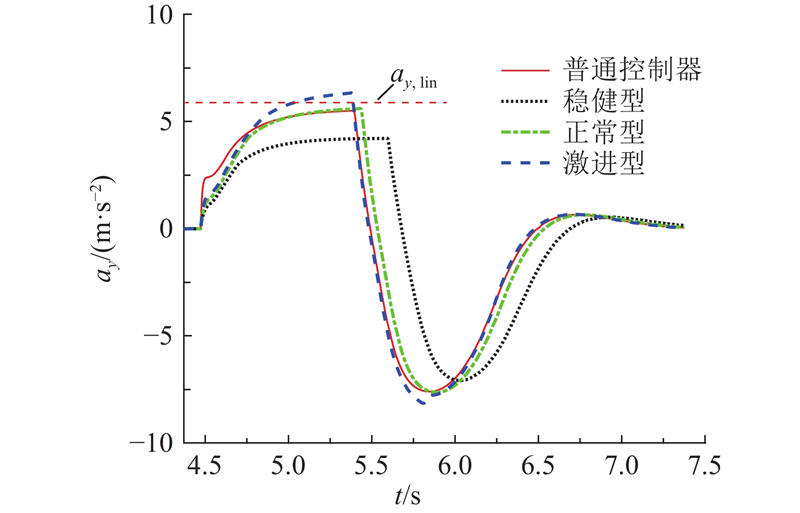
图 15 不同避障算法的侧向加速度对比图(vx=24 m/s)
Fig.15 Comparison of lateral acceleration for different obstacle avoidance algorithms (vx=24 m/s)
图 16
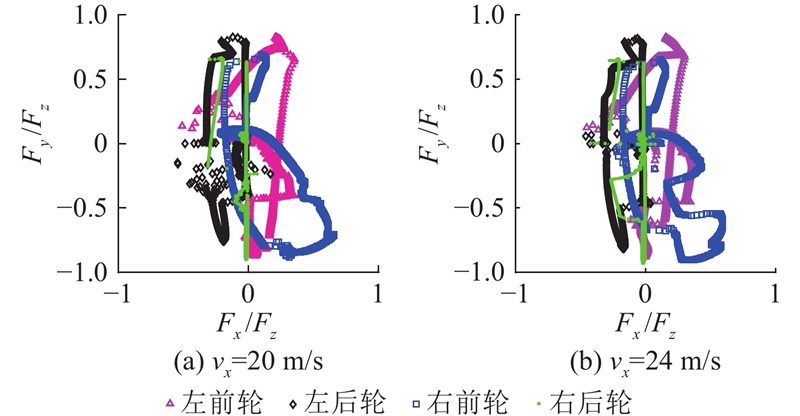
图 16 激进型驾驶风格避障时的轮胎使用率
Fig.16 Tire utilization during obstacle avoidance in aggressive driving style
4.2. 驾驶员主观评价
驾驶员不会使用不可接受的驾驶辅助系统,因此驾驶员对辅助系统的主观评价与技术发展同样重要. 本研究邀请24名评价者(其中12人参与过驾驶风格数据采集实验),分别对考虑驾驶风格和传统未考虑驾驶风格的避障控制系统进行主观评价. 评价者先接受培训,在了解实验内容和目的之后,坐在驾驶模拟器中,通过观看避障视频,在事先未明确告知视频对应驾驶风格的前提下,感受传统避障控制和考虑自身驾驶风格的自动避障的区别. 评价者分别填写问卷,以便评估和比较驾驶员在每个实验阶段后对系统的印象[30]. 评价者将在10 cm的线上画标记,从0到10(由弱到强)标记对评价项目的认可程度
如图17所示为评价者对系统的理解度
图 17
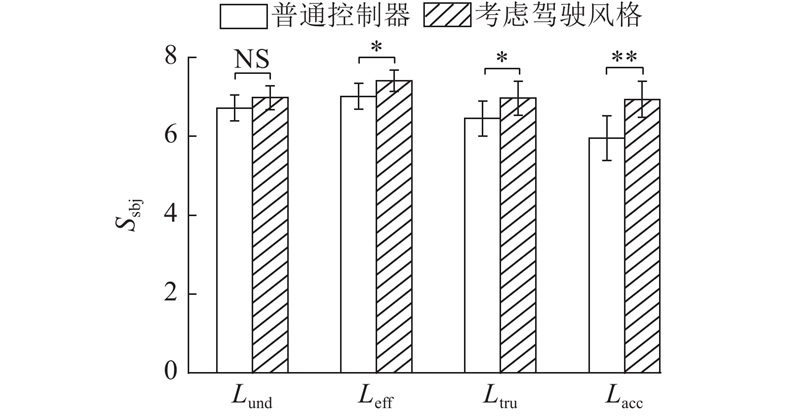
图 17 不同避障算法的主观评价得分对比
Fig.17 Comparison of subjective evaluation scores for different obstacle avoidance algorithms
5. 结 语
本研究提出考虑驾驶风格的车辆转向避障控制算法,提高了驾驶员对辅助系统的信任度和接受度;使用机器学习的方法实现驾驶风格的在线识别,在此基础上,根据驾驶风格和道路环境得到期望最大侧向加速度及其变化率约束,在保证车辆横摆稳定性和避障安全性的前提下,实现了考虑驾驶风格的转向避障控制. 仿真验证和驾驶员主观评价结果表明,相较于以数据为驱动的控制器,传统未考虑驾驶风格的控制器在不同工况下驾驶风格不定,所提避障控制系统针对不同驾驶风格做出相应的避障操作,能够满足不同驾驶员的偏好. 在保证自车安全稳定的前提下,相比于未考虑驾驶风格的传统控制器,评价者的有效性评价提升了5.66%,信任度提升了7.97%,接受度提升了16.58%. 本研究未考虑相邻车道有车的工况,未来计划集成避障、跟车和转向等工况下的驾驶风格设计控制系统,以降低系统的冗杂度.
参考文献
A new strategy for rear-end collision avoidance via autonomous steering and differential braking in highway driving
[J].DOI:10.1080/00423114.2019.1602732 [本文引用: 10]
Obstacle avoidance for self-driving vehicle with reinforcement learning
[J].
基于深度学习 LSTM 的智能车辆避撞模型及验证
[J].
Collision avoidance model and its validation for intelligent vehicles based on deep learning LSTM
[J].
Path planning and path tracking for collision avoidance of autonomous ground vehicles
[J].
Collision avoidance/mitigation system: motion planning of autonomous vehicle via predictive occupancy map
[J].DOI:10.1109/ACCESS.2019.2912067 [本文引用: 1]
Drivers trust, acceptance, and takeover behaviors in fully automated vehicles: effects of automated driving styles and driver’s driving styles
[J].DOI:10.1016/j.aap.2021.106238 [本文引用: 1]
Can emotion regulation explain the association between age and driving styles?
[J].DOI:10.1016/j.trf.2020.09.008 [本文引用: 1]
Investigating the effect of personality on left-turn behaviors in various scenarios to understand the dynamics of driving styles
[J].DOI:10.1080/15389588.2019.1673893 [本文引用: 1]
An intention-aware and online driving style estimation based personalized autonomous driving strategy
[J].DOI:10.1007/s12239-020-0135-3 [本文引用: 1]
Combined trajectory planning and tracking for autonomous vehicle considering driving styles
[J].DOI:10.1109/ACCESS.2021.3050005 [本文引用: 1]
Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios
[J].DOI:10.1016/j.trc.2020.102820 [本文引用: 1]
The magic formula tyre model
[J].
The influence of physical and emotional factors on driving style of car drivers: a survey design
[J].DOI:10.1016/j.tbs.2017.02.001 [本文引用: 1]
Personalized lane-change assistance system with driver behavior identification
[J].DOI:10.1109/TVT.2018.2867541 [本文引用: 1]
A review of research on driving styles and road safety
[J].DOI:10.1177/0018720815591313 [本文引用: 1]
基于不同风格行驶模型的自动驾驶仿真测试自演绎场景研究
[J].
Self-evolution scenarios for simulation tests of autonomous vehicles based on different models of driving styles
[J].
考虑驾驶风格的路径跟踪控制方法
[J].
Path tracking control method considering driving styles
[J].
A systematic methodology to evaluate prediction models for driving style classification
[J].DOI:10.3390/s20061692 [本文引用: 1]
软约束线性模型预测控制系统的稳定性方法
[J].
Stabilization of linear predictive control systems with softening constraints
[J].
Receding horizon maneuver generation for automated highway driving
[J].DOI:10.1016/j.conengprac.2015.04.006 [本文引用: 1]
A hierarchical framework of emergency collision avoidance amid surrounding vehicles in highway driving
[J].DOI:10.1016/j.conengprac.2021.104751 [本文引用: 1]
Sliding mode direct yaw-moment control design for in-wheel electric vehicles
[J].DOI:10.1109/TIE.2017.2682024 [本文引用: 1]
Long-term evaluation of drivers’ behavioral adaptation to an adaptive collision avoidance system
[J].DOI:10.1177/0018720820926092 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}