[1]
中华人民共和国国务院安全生产委员会. 国务院安全生产委员会关于印发道路交通安全“十三五”规划的通知[A/OL]. [2017-08-08] (2022-08-22). https://www.mem.gov.cn/gk/gwgg/agwzlfl/tz_01/201709/t20170907_235227.shtml.
[本文引用: 1]
[2]
MA Y, MENG H, CHEN S, et al Predicting traffic conflicts for expressway diverging areas using vehicle trajectory data
[J]. Journal of Transportation Engineering, Part A: Systems , 2020 , 146 (3 ): 04020003
DOI:10.1061/JTEPBS.0000320
[本文引用: 1]
[3]
SOLOMON D. Accidents on main rural highways related to speed, driver, and vehicle[R]. United States: Bureau of Public Roads, 1970: 1-44.
[本文引用: 1]
[5]
ADELL E, VÁRHELYI A, DALLA F M The effects of a driver assistance system for safe speed and safe distance–a real-life field study
[J]. Transportation Research Part C: Emerging Technologies , 2011 , 19 (1 ): 145 - 155
DOI:10.1016/j.trc.2010.04.006
[本文引用: 1]
[6]
张驰, 孟良, 汪双杰, 等 高速公路曲线路段小客车制动行为侧滑风险仿真分析
[J]. 中国公路学报 , 2015 , 28 (12 ): 134 - 142
DOI:10.3969/j.issn.1001-7372.2015.12.019
[本文引用: 1]
ZHANG Chi, MENG Liang, WANG Shuang-jie, et al Sideslip risk simulation analysis of passenger car braking behavior on expressway curved sections
[J]. Transportation Research Part C: Emerging Technologies , 2015 , 28 (12 ): 134 - 142
DOI:10.3969/j.issn.1001-7372.2015.12.019
[本文引用: 1]
[7]
YANG H, OZBAY K Estimation of traffic conflict risk for merging vehicles on highway merge section
[J]. Transportation Research Record , 2011 , 2236 (1 ): 58 - 65
DOI:10.3141/2236-07
[本文引用: 1]
[8]
WANG X, WANG X Speed change behavior on combined horizontal and vertical curves: driving simulator-based analysis
[J]. Accident Analysis and Prevention , 2018 , 119 (1 ): 215 - 224
[本文引用: 1]
[9]
AARTS L, VAN S I Driving speed and the risk of road crashes: a review
[J]. Accident Analysis and Prevention , 2006 , 38 (2 ): 215 - 224
DOI:10.1016/j.aap.2005.07.004
[本文引用: 1]
[10]
YU R, QUDDUS M, WANG X, et al Impact of data aggregation approaches on the relationships between operating speed and traffic safety
[J]. Accident Analysis and Prevention , 2018 , 120 (1 ): 304 - 310
[本文引用: 1]
[11]
WU H Comparing Google maps and uber movement travel time data
[J]. Findings , 2019 , (1 ): 5115
[本文引用: 1]
[12]
WOLF M T, BURDICK J W. Artificial potential functions for highway driving with collision avoidance [C]// 2008 IEEE International Conference on Robotics and Automation . Pasadena: IEEE, 2008: 3731-3736.
[本文引用: 1]
[13]
WOO H, JI Y, KONO H, et al Lane-change detection based on vehicle-trajectory prediction
[J]. IEEE Robotics and Automation Letters , 2017 , 2 (2 ): 1109 - 1116
DOI:10.1109/LRA.2017.2660543
[本文引用: 1]
[14]
陶鹏飞, 金盛, 王殿海 基于人工势能场的跟驰模型
[J]. 东南大学学报:自然科学版 , 2011 , 41 (4 ): 854 - 858
[本文引用: 1]
TAO Peng-fei, JIN Sheng, WANG Dian-hai Car-following model based on artificial potential field
[J]. Journal of Southeast University: Natural Science Edition , 2011 , 41 (4 ): 854 - 858
[本文引用: 1]
[15]
WANG J, WU J, ZHENG X, et al Driving safety field theory modeling and its application in pre-collision warning system
[J]. Transportation Research Part C: Emerging Technologies , 2016 , 72 (1 ): 306 - 324
[本文引用: 1]
[16]
吴剑. 考虑人-车-路因素的行车风险评价方法研究[D]. 北京: 清华大学, 2015: 1-68.
[本文引用: 1]
WU Jian. Research on driver-vehicle-road factors considered driving risk evaluation method [D]. Beijing: Tsinghua University , 2015: 1-68.
[本文引用: 1]
[17]
SHOARIANSATTARI K, POWELL D Measured vehicle flow parameters as predictors in road traffic accident studies
[J]. Traffic Engineering and Control , 1987 , 28 (6 ): 328 - 329
[本文引用: 1]
[18]
华杰工程咨询有限公司. 公路项目安全性评价规范: JTG B05—2015 [S]. 北京: 人民交通出版社, 2015.
[本文引用: 1]
[19]
ZHU Z, LU Y, FU C, et al Research on the safety audit methods for two-lane highway based on HRV
[J]. Mathematical Problems in Engineering , 2014 , (1 ): 308028
[本文引用: 1]
[21]
马聪, 张生瑞, 马壮林, 等 高速公路交通事故非线性负二项预测模型
[J]. 中国公路学报 , 2018 , 31 (11 ): 176 - 185
DOI:10.3969/j.issn.1001-7372.2018.11.019
[本文引用: 1]
MA Cong, ZHANG Sheng-rui, MA Zhuang-lin, et al Nonlinear negative binomial regression model of expressway traffic accident frequency prediction
[J]. China Journal of Highway and Transport , 2018 , 31 (11 ): 176 - 185
DOI:10.3969/j.issn.1001-7372.2018.11.019
[本文引用: 1]
[22]
AHMED M, HUANG H, ABDELATY M, et al Exploring a Bayesian hierarchical approach for developing safety performance functions for a mountainous freeway
[J]. Accident Analysis and Prevention , 2011 , 43 (4 ): 1581 - 1589
DOI:10.1016/j.aap.2011.03.021
[本文引用: 1]
[23]
林宣财, 张旭丰, 王佐, 等 基于交通事故多发位置的区间平均纵坡控制指标研究
[J]. 公路交通科技 , 2021 , 38 (9 ): 105 - 113
DOI:10.3969/j.issn.1002-0268.2021.09.014
[本文引用: 1]
LIN Xuan-cai, ZHANG Xu-feng, WANG Zuo, et al Study on control indicator of interval average longitudinal slope based on location of traffic accidents
[J]. Journal of Highway and Transportation Research and Development , 2021 , 38 (9 ): 105 - 113
DOI:10.3969/j.issn.1002-0268.2021.09.014
[本文引用: 1]
[24]
WONG Y D, NICHOLSON A Driver behaviour at horizontal curves: risk compensation and the margin of safety
[J]. Accident Analysis and Prevention , 1992 , 24 (4 ): 425 - 436
DOI:10.1016/0001-4575(92)90053-L
[本文引用: 1]
[25]
张驰, 王博, 贺九平, 等 基于行车动力学的高速公路积水路段行车风险分析
[J]. 交通信息与安全 , 2019 , 37 (5 ): 9 - 17
DOI:10.3963/j.issn.1674-4861.2019.05.002
[本文引用: 1]
ZHANG Chi, WANG Bo, HE Jiu-ping, et al Traffic risk analysis of ponding sections on freeways based on driving dynamics
[J]. Journal of Transport Information and Safety , 2019 , 37 (5 ): 9 - 17
DOI:10.3963/j.issn.1674-4861.2019.05.002
[本文引用: 1]
[26]
中交第一公路勘察设计研究院有限公司. 公路路线设计规范: JTG D20-2017[S]. 北京: 人民交通出版社, 2017.
[本文引用: 1]
[27]
ANSSEN W H, TENKINK E Considerations on speed selection and risk homeostasis in driving
[J]. Accident Analysis and Prevention , 1988 , 20 (2 ): 137 - 142
DOI:10.1016/0001-4575(88)90030-9
[本文引用: 1]
[28]
XU C, LIU P, WANG W, et al Evaluation of the impacts of traffic states on crash risks on freeways
[J]. Accident Analysis and Prevention , 2012 , 47 (1 ): 162 - 171
[本文引用: 1]
[29]
GARBER N J, EHRHART A A Effect of speed, flow, and geometric characteristics on crash frequency for two-lane highways
[J]. Transportation Research Record , 2000 , 1717 (1 ): 76 - 83
DOI:10.3141/1717-10
[本文引用: 1]
[30]
WANG X, WANG T, TARKO A, et al The influence of combined alignments on lateral acceleration on mountainous freeways: a driving simulator study
[J]. Accident Analysis and Prevention , 2015 , 76 (1 ): 110 - 117
[本文引用: 1]
[31]
汪双杰, 方靖, 周荣贵, 等 公路运行速度特征研究
[J]. 中国公路学报 , 2010 , 23 (S1 ): 24 - 27
[本文引用: 1]
WANG Shuang-jie, FANG Jing, ZHOU Rong-gui, et al Study on characteristics of highway speed
[J]. China Journal of Highway and Transport , 2010 , 23 (S1 ): 24 - 27
[本文引用: 1]
[33]
SIL G, NAMA S, MAJI A, et al Effect of horizontal curve geometry on vehicle speed distribution: a four-lane divided highway study
[J]. Transportation Letters , 2020 , 12 (10 ): 713 - 722
DOI:10.1080/19427867.2019.1695562
[本文引用: 1]
[34]
GAO C, XU J, LI Q, et al The effect of posted speed limit on the dispersion of traffic flow speed
[J]. Sustainability , 2019 , 11 (13 ): 3594
DOI:10.3390/su11133594
[本文引用: 1]
[36]
EGGERT J. Solomon curve 2020: relating microscopic risk models with accident statistics [C]// 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC) . Rio de Janeiro: IEEE, 2016: 2293-2300.
[本文引用: 1]
[37]
林宣财, 曹骏驹, 周兴顺, 等 互通式立交单车道匝道宽度取值与单出入口优化设计
[J]. 公路交通科技 , 2021 , 38 (9 ): 123 - 131
DOI:10.3969/j.issn.1002-0268.2021.09.016
[本文引用: 1]
LIN Xuan-cai, CAO Jun-ju, ZHOU Xing-shun, et al Value of single lane ramp width and optimization design of single entrance and exit for interchange
[J]. Journal of Highway and Transportation Research , 2021 , 38 (9 ): 123 - 131
DOI:10.3969/j.issn.1002-0268.2021.09.016
[本文引用: 1]
[38]
QU D, CHEN X, YANG W, et al Modeling of car-following required safe distance based on molecular dynamics
[J]. Mathematical Problems in Engineering , 2014 , (1 ): 604023
[本文引用: 1]
[40]
HURDLE V F, MERLO M I, ROBERTSON D Study of speed-flow relationships on individual freeway lanes
[J]. Transportation Research Record , 1997 , 1591 (1 ): 7 - 13
DOI:10.3141/1591-02
[41]
SHANKAR V, MANNERING F Modeling the endogeneity of lane-mean speeds and lane-speed deviations: a structural equations approach
[J]. Transportation Research Part A: Policy and Practice , 1998 , 32 (5 ): 311 - 322
DOI:10.1016/S0965-8564(98)00003-2
[本文引用: 1]
[42]
陆建, 孙祥龙, 戴越 普通公路车速分布特性的回归分析
[J]. 东南大学学报:自然科学版 , 2012 , 42 (2 ): 374 - 377
[本文引用: 1]
LU Jian, SUN Xiang-long, DAI Yue Regression analysis on speed distribution characteristics of ordinary road
[J]. Journal of Southeast University: Natural Science Edition , 2012 , 42 (2 ): 374 - 377
[本文引用: 1]
[43]
吴明先, 曹骏驹, 林宣财, 等 多车道高速公路不同车道运行速度的特点
[J]. 公路交通科技 , 2021 , 38 (9 ): 33 - 44
DOI:10.3969/j.issn.1002-0268.2021.09.005
[本文引用: 1]
WU Ming-xian, CAO Jun-ju, LIN Xuan-cai, et al Operating speed characteristics in different lanes of multi-lane expressway
[J]. Journal of Highway and Transportation Research and Development , 2021 , 38 (9 ): 33 - 44
DOI:10.3969/j.issn.1002-0268.2021.09.005
[本文引用: 1]
[44]
裴玉龙, 程国柱 高速公路车速离散性与交通事故的关系及车速管理研究
[J]. 中国公路学报 , 2004 , 17 (1 ): 74 - 78
DOI:10.3321/j.issn:1001-7372.2004.01.017
[本文引用: 1]
PEI Yulong, CHENG Guozhu Research on the relationship between discrete character of speed and traffic accident and speed management of freeway
[J]. China Journal of Highway and Transport , 2004 , 17 (1 ): 74 - 78
DOI:10.3321/j.issn:1001-7372.2004.01.017
[本文引用: 1]
1
... 随着道路监控、电子不停车收费及高清卡口等设施全面普及,目前我国高速公路管理已经进入数字化时代. 按照国务院安委会发布《道路交通安全“十三五”规划》[1 ] ,截止2020年底全国各运营公司均已完成运营监控调度中心建设,全国高速公路已基本实现实时监控全覆盖. 面对种类繁杂的海量信息,如何快速甄别出重点管控的高风险路段成为新的挑战. 根据高速公路安全管理“精准监测、动态管控及快速反应”的需求,研究高速公路行车风险甄别方法,对于智慧感知设备布局、重点监测路段划分和交通管控决策具有重要意义. ...
Predicting traffic conflicts for expressway diverging areas using vehicle trajectory data
1
2020
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
1
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
基于支持向量回归的视距计算模型建立和应用
1
2018
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
基于支持向量回归的视距计算模型建立和应用
1
2018
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
The effects of a driver assistance system for safe speed and safe distance–a real-life field study
1
2011
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
高速公路曲线路段小客车制动行为侧滑风险仿真分析
1
2015
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
高速公路曲线路段小客车制动行为侧滑风险仿真分析
1
2015
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
Estimation of traffic conflict risk for merging vehicles on highway merge section
1
2011
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
Speed change behavior on combined horizontal and vertical curves: driving simulator-based analysis
1
2018
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
Driving speed and the risk of road crashes: a review
1
2006
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
Impact of data aggregation approaches on the relationships between operating speed and traffic safety
1
2018
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
Comparing Google maps and uber movement travel time data
1
2019
... 车辆在行驶过程中,驾驶人通过感知障碍物距离和惯性力等信息对行车风险进行判别. 驾驶人根据感知到的行车风险,会改变车辆速度或轨迹,以主动降低行车风险[2 ] ,即车速在路域空间上的分布规律能够在一定程度上反映行车风险. 自1964年起,学者们从不同角度研究车辆速度对行车风险的影响[3 ] . 相关研究可以分为风险机理和事故相关性2个方面,其中关于风险机理的研究,学者们从“人、车、路”等角度尝试诠释速度对行车风险影响的内在规律,提出“视距理论”[4 ] 、“安全距离理论”[5 ] 、“车辆动力学”[6 ] 和“交通冲突”[7 ] 等理论;在事故相关性方面,学者们通过统计学方法分析速度与交通事故的相关性,相关统计指标包括速度绝对值[8 ] 、速度离散度[9 ] 、运行速度[10 ] 等. 基于风险机理的评估方法,能够对风险类型进行有效甄别,但是风险致因考虑较为单一,风险评估结果不全面. 基于速度统计指标的评估方法能够较为全面地表征行车风险,但是受数据采集方法的限制,速度在二维空间的分布情况研究较少. 得益于卫星导航、高清卡口等技术的发展,车速数据的监测效率和精度不断提高[11 ] . 采用这些技术能够获取车速在路域空间的纵向和横向分布数据,为更深层次的行车风险的分类甄别研究奠定了良好的数据基础. ...
1
... 21世纪初期,人工智能领域率先引用势场理论提出“虚拟引力场”并应用于机器人行为规划. 近年来自动驾驶技术的相关学者,将势场理论引入交通领域,为行车风险研究提出了新的思路. 目前势场理论在交通领域的相关研究主要有道路势场、车辆动能场和驾驶行为场3个方面. 在道路势场方面,Wolf等[12 ] 考虑车道标线和道路边界等因素对行车的影响,采用类高斯函数建立道路侧向的车道势场计算模型;在车辆动能场方面,Woo等[13 ] 以车辆速度、距离和角度等参数建立车辆动能场模型,结合车辆轨迹预测分析相邻4个车辆对车辆换道风险的影响,提出一种换道风险评估方法;在驾驶行为场方面,陶鹏飞等[14 ] 在分析驾驶人心理特点的基础上,结合人工势场理论提出吸引力模型和排斥力模型,建立包含减速停车、启动加速和常态行驶3种运行状态的跟驰模型. 目前,清华大学王建强等[15 -16 ] 在行车风险研究中引入势场理论,提出安全势场理论. 安全势场在融合“人-车-路-环境”各类风险因素和统一风险刻画方法方面具有明显优势,并且为路域二维空间内的行车风险分析提供新的思路. ...
Lane-change detection based on vehicle-trajectory prediction
1
2017
... 21世纪初期,人工智能领域率先引用势场理论提出“虚拟引力场”并应用于机器人行为规划. 近年来自动驾驶技术的相关学者,将势场理论引入交通领域,为行车风险研究提出了新的思路. 目前势场理论在交通领域的相关研究主要有道路势场、车辆动能场和驾驶行为场3个方面. 在道路势场方面,Wolf等[12 ] 考虑车道标线和道路边界等因素对行车的影响,采用类高斯函数建立道路侧向的车道势场计算模型;在车辆动能场方面,Woo等[13 ] 以车辆速度、距离和角度等参数建立车辆动能场模型,结合车辆轨迹预测分析相邻4个车辆对车辆换道风险的影响,提出一种换道风险评估方法;在驾驶行为场方面,陶鹏飞等[14 ] 在分析驾驶人心理特点的基础上,结合人工势场理论提出吸引力模型和排斥力模型,建立包含减速停车、启动加速和常态行驶3种运行状态的跟驰模型. 目前,清华大学王建强等[15 -16 ] 在行车风险研究中引入势场理论,提出安全势场理论. 安全势场在融合“人-车-路-环境”各类风险因素和统一风险刻画方法方面具有明显优势,并且为路域二维空间内的行车风险分析提供新的思路. ...
基于人工势能场的跟驰模型
1
2011
... 21世纪初期,人工智能领域率先引用势场理论提出“虚拟引力场”并应用于机器人行为规划. 近年来自动驾驶技术的相关学者,将势场理论引入交通领域,为行车风险研究提出了新的思路. 目前势场理论在交通领域的相关研究主要有道路势场、车辆动能场和驾驶行为场3个方面. 在道路势场方面,Wolf等[12 ] 考虑车道标线和道路边界等因素对行车的影响,采用类高斯函数建立道路侧向的车道势场计算模型;在车辆动能场方面,Woo等[13 ] 以车辆速度、距离和角度等参数建立车辆动能场模型,结合车辆轨迹预测分析相邻4个车辆对车辆换道风险的影响,提出一种换道风险评估方法;在驾驶行为场方面,陶鹏飞等[14 ] 在分析驾驶人心理特点的基础上,结合人工势场理论提出吸引力模型和排斥力模型,建立包含减速停车、启动加速和常态行驶3种运行状态的跟驰模型. 目前,清华大学王建强等[15 -16 ] 在行车风险研究中引入势场理论,提出安全势场理论. 安全势场在融合“人-车-路-环境”各类风险因素和统一风险刻画方法方面具有明显优势,并且为路域二维空间内的行车风险分析提供新的思路. ...
基于人工势能场的跟驰模型
1
2011
... 21世纪初期,人工智能领域率先引用势场理论提出“虚拟引力场”并应用于机器人行为规划. 近年来自动驾驶技术的相关学者,将势场理论引入交通领域,为行车风险研究提出了新的思路. 目前势场理论在交通领域的相关研究主要有道路势场、车辆动能场和驾驶行为场3个方面. 在道路势场方面,Wolf等[12 ] 考虑车道标线和道路边界等因素对行车的影响,采用类高斯函数建立道路侧向的车道势场计算模型;在车辆动能场方面,Woo等[13 ] 以车辆速度、距离和角度等参数建立车辆动能场模型,结合车辆轨迹预测分析相邻4个车辆对车辆换道风险的影响,提出一种换道风险评估方法;在驾驶行为场方面,陶鹏飞等[14 ] 在分析驾驶人心理特点的基础上,结合人工势场理论提出吸引力模型和排斥力模型,建立包含减速停车、启动加速和常态行驶3种运行状态的跟驰模型. 目前,清华大学王建强等[15 -16 ] 在行车风险研究中引入势场理论,提出安全势场理论. 安全势场在融合“人-车-路-环境”各类风险因素和统一风险刻画方法方面具有明显优势,并且为路域二维空间内的行车风险分析提供新的思路. ...
Driving safety field theory modeling and its application in pre-collision warning system
1
2016
... 21世纪初期,人工智能领域率先引用势场理论提出“虚拟引力场”并应用于机器人行为规划. 近年来自动驾驶技术的相关学者,将势场理论引入交通领域,为行车风险研究提出了新的思路. 目前势场理论在交通领域的相关研究主要有道路势场、车辆动能场和驾驶行为场3个方面. 在道路势场方面,Wolf等[12 ] 考虑车道标线和道路边界等因素对行车的影响,采用类高斯函数建立道路侧向的车道势场计算模型;在车辆动能场方面,Woo等[13 ] 以车辆速度、距离和角度等参数建立车辆动能场模型,结合车辆轨迹预测分析相邻4个车辆对车辆换道风险的影响,提出一种换道风险评估方法;在驾驶行为场方面,陶鹏飞等[14 ] 在分析驾驶人心理特点的基础上,结合人工势场理论提出吸引力模型和排斥力模型,建立包含减速停车、启动加速和常态行驶3种运行状态的跟驰模型. 目前,清华大学王建强等[15 -16 ] 在行车风险研究中引入势场理论,提出安全势场理论. 安全势场在融合“人-车-路-环境”各类风险因素和统一风险刻画方法方面具有明显优势,并且为路域二维空间内的行车风险分析提供新的思路. ...
1
... 21世纪初期,人工智能领域率先引用势场理论提出“虚拟引力场”并应用于机器人行为规划. 近年来自动驾驶技术的相关学者,将势场理论引入交通领域,为行车风险研究提出了新的思路. 目前势场理论在交通领域的相关研究主要有道路势场、车辆动能场和驾驶行为场3个方面. 在道路势场方面,Wolf等[12 ] 考虑车道标线和道路边界等因素对行车的影响,采用类高斯函数建立道路侧向的车道势场计算模型;在车辆动能场方面,Woo等[13 ] 以车辆速度、距离和角度等参数建立车辆动能场模型,结合车辆轨迹预测分析相邻4个车辆对车辆换道风险的影响,提出一种换道风险评估方法;在驾驶行为场方面,陶鹏飞等[14 ] 在分析驾驶人心理特点的基础上,结合人工势场理论提出吸引力模型和排斥力模型,建立包含减速停车、启动加速和常态行驶3种运行状态的跟驰模型. 目前,清华大学王建强等[15 -16 ] 在行车风险研究中引入势场理论,提出安全势场理论. 安全势场在融合“人-车-路-环境”各类风险因素和统一风险刻画方法方面具有明显优势,并且为路域二维空间内的行车风险分析提供新的思路. ...
1
... 21世纪初期,人工智能领域率先引用势场理论提出“虚拟引力场”并应用于机器人行为规划. 近年来自动驾驶技术的相关学者,将势场理论引入交通领域,为行车风险研究提出了新的思路. 目前势场理论在交通领域的相关研究主要有道路势场、车辆动能场和驾驶行为场3个方面. 在道路势场方面,Wolf等[12 ] 考虑车道标线和道路边界等因素对行车的影响,采用类高斯函数建立道路侧向的车道势场计算模型;在车辆动能场方面,Woo等[13 ] 以车辆速度、距离和角度等参数建立车辆动能场模型,结合车辆轨迹预测分析相邻4个车辆对车辆换道风险的影响,提出一种换道风险评估方法;在驾驶行为场方面,陶鹏飞等[14 ] 在分析驾驶人心理特点的基础上,结合人工势场理论提出吸引力模型和排斥力模型,建立包含减速停车、启动加速和常态行驶3种运行状态的跟驰模型. 目前,清华大学王建强等[15 -16 ] 在行车风险研究中引入势场理论,提出安全势场理论. 安全势场在融合“人-车-路-环境”各类风险因素和统一风险刻画方法方面具有明显优势,并且为路域二维空间内的行车风险分析提供新的思路. ...
Measured vehicle flow parameters as predictors in road traffic accident studies
1
1987
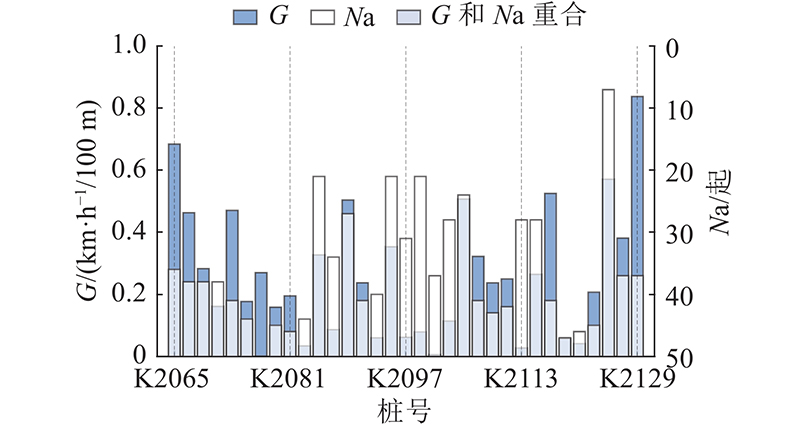
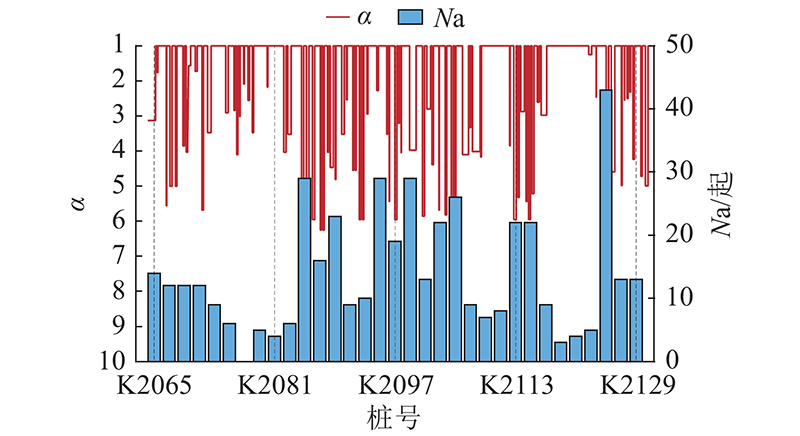
... Shoarian等[17 ] 研究交通流相关参数与交通事故的相关性,发现速度梯度对交通事故风险具有较高的影响度. 在我国《公路项目安全性评价规范》(JTG B05—2015)[18 ] 中,以运行速度梯度的绝对值作为运行速度协调性评价指标. Zhu等[19 ] 对比设计速度、运行速度、加速度及速度梯度等速度相关安全性指标,结果表明车辆速度梯度评价效果优于其他指标. 对比交通流速度梯度G 与交通事故的分布规律,如图3 所示,图中N a为事故数. 交通流速度梯度分布和交通事故分布有一定的趋同性,但是在K2085~K2105相关性较低. ...
1
... Shoarian等[17 ] 研究交通流相关参数与交通事故的相关性,发现速度梯度对交通事故风险具有较高的影响度. 在我国《公路项目安全性评价规范》(JTG B05—2015)[18 ] 中,以运行速度梯度的绝对值作为运行速度协调性评价指标. Zhu等[19 ] 对比设计速度、运行速度、加速度及速度梯度等速度相关安全性指标,结果表明车辆速度梯度评价效果优于其他指标. 对比交通流速度梯度G 与交通事故的分布规律,如图3 所示,图中N a为事故数. 交通流速度梯度分布和交通事故分布有一定的趋同性,但是在K2085~K2105相关性较低. ...
Research on the safety audit methods for two-lane highway based on HRV
1
2014
... Shoarian等[17 ] 研究交通流相关参数与交通事故的相关性,发现速度梯度对交通事故风险具有较高的影响度. 在我国《公路项目安全性评价规范》(JTG B05—2015)[18 ] 中,以运行速度梯度的绝对值作为运行速度协调性评价指标. Zhu等[19 ] 对比设计速度、运行速度、加速度及速度梯度等速度相关安全性指标,结果表明车辆速度梯度评价效果优于其他指标. 对比交通流速度梯度G 与交通事故的分布规律,如图3 所示,图中N a为事故数. 交通流速度梯度分布和交通事故分布有一定的趋同性,但是在K2085~K2105相关性较低. ...
基于负二项分布的高速公路交通事故影响因素分析
1
2022
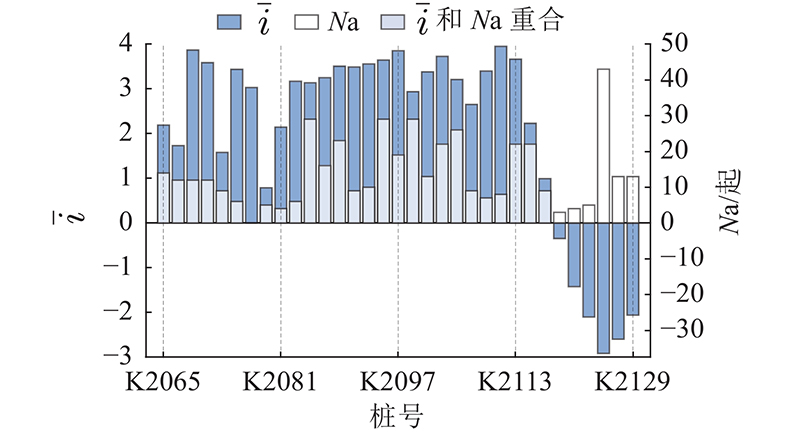
... 纵坡是影响高速公路交通安全的重要指标,坡率与交通事故数正相关[20 ] . 道路纵坡对交通安全的影响,主要用于车速和车辆制动能力. 对于上坡路段,坡率越大,不同车型爬坡能力不同,容易引起速差较大,车辆换道超车概率增加;对于下坡路段,坡率越大、坡长越长,车辆制动行为越频繁,并且制动距离越低. 马聪等[21 ] 对比了曲率半径和道路纵坡对事故预测的影响,认为道路纵坡对山区高速公路的影响更高、Ahmed等[22 ] 的研究结果显示下坡路段较上坡路段事故率更高,对比道路平均纵坡与交通事故的分布规律,如图4 所示. 结果表明平均纵坡 $\bar i$ [23 ] 的研究结果一致. 此外,事故数最高的路段位于K2118~K2130下坡路段中部. ...
基于负二项分布的高速公路交通事故影响因素分析
1
2022
... 纵坡是影响高速公路交通安全的重要指标,坡率与交通事故数正相关[20 ] . 道路纵坡对交通安全的影响,主要用于车速和车辆制动能力. 对于上坡路段,坡率越大,不同车型爬坡能力不同,容易引起速差较大,车辆换道超车概率增加;对于下坡路段,坡率越大、坡长越长,车辆制动行为越频繁,并且制动距离越低. 马聪等[21 ] 对比了曲率半径和道路纵坡对事故预测的影响,认为道路纵坡对山区高速公路的影响更高、Ahmed等[22 ] 的研究结果显示下坡路段较上坡路段事故率更高,对比道路平均纵坡与交通事故的分布规律,如图4 所示. 结果表明平均纵坡 $\bar i$ [23 ] 的研究结果一致. 此外,事故数最高的路段位于K2118~K2130下坡路段中部. ...
高速公路交通事故非线性负二项预测模型
1
2018
... 纵坡是影响高速公路交通安全的重要指标,坡率与交通事故数正相关[20 ] . 道路纵坡对交通安全的影响,主要用于车速和车辆制动能力. 对于上坡路段,坡率越大,不同车型爬坡能力不同,容易引起速差较大,车辆换道超车概率增加;对于下坡路段,坡率越大、坡长越长,车辆制动行为越频繁,并且制动距离越低. 马聪等[21 ] 对比了曲率半径和道路纵坡对事故预测的影响,认为道路纵坡对山区高速公路的影响更高、Ahmed等[22 ] 的研究结果显示下坡路段较上坡路段事故率更高,对比道路平均纵坡与交通事故的分布规律,如图4 所示. 结果表明平均纵坡 $\bar i$ [23 ] 的研究结果一致. 此外,事故数最高的路段位于K2118~K2130下坡路段中部. ...
高速公路交通事故非线性负二项预测模型
1
2018
... 纵坡是影响高速公路交通安全的重要指标,坡率与交通事故数正相关[20 ] . 道路纵坡对交通安全的影响,主要用于车速和车辆制动能力. 对于上坡路段,坡率越大,不同车型爬坡能力不同,容易引起速差较大,车辆换道超车概率增加;对于下坡路段,坡率越大、坡长越长,车辆制动行为越频繁,并且制动距离越低. 马聪等[21 ] 对比了曲率半径和道路纵坡对事故预测的影响,认为道路纵坡对山区高速公路的影响更高、Ahmed等[22 ] 的研究结果显示下坡路段较上坡路段事故率更高,对比道路平均纵坡与交通事故的分布规律,如图4 所示. 结果表明平均纵坡 $\bar i$ [23 ] 的研究结果一致. 此外,事故数最高的路段位于K2118~K2130下坡路段中部. ...
Exploring a Bayesian hierarchical approach for developing safety performance functions for a mountainous freeway
1
2011
... 纵坡是影响高速公路交通安全的重要指标,坡率与交通事故数正相关[20 ] . 道路纵坡对交通安全的影响,主要用于车速和车辆制动能力. 对于上坡路段,坡率越大,不同车型爬坡能力不同,容易引起速差较大,车辆换道超车概率增加;对于下坡路段,坡率越大、坡长越长,车辆制动行为越频繁,并且制动距离越低. 马聪等[21 ] 对比了曲率半径和道路纵坡对事故预测的影响,认为道路纵坡对山区高速公路的影响更高、Ahmed等[22 ] 的研究结果显示下坡路段较上坡路段事故率更高,对比道路平均纵坡与交通事故的分布规律,如图4 所示. 结果表明平均纵坡 $\bar i$ [23 ] 的研究结果一致. 此外,事故数最高的路段位于K2118~K2130下坡路段中部. ...
基于交通事故多发位置的区间平均纵坡控制指标研究
1
2021
... 纵坡是影响高速公路交通安全的重要指标,坡率与交通事故数正相关[20 ] . 道路纵坡对交通安全的影响,主要用于车速和车辆制动能力. 对于上坡路段,坡率越大,不同车型爬坡能力不同,容易引起速差较大,车辆换道超车概率增加;对于下坡路段,坡率越大、坡长越长,车辆制动行为越频繁,并且制动距离越低. 马聪等[21 ] 对比了曲率半径和道路纵坡对事故预测的影响,认为道路纵坡对山区高速公路的影响更高、Ahmed等[22 ] 的研究结果显示下坡路段较上坡路段事故率更高,对比道路平均纵坡与交通事故的分布规律,如图4 所示. 结果表明平均纵坡 $\bar i$ [23 ] 的研究结果一致. 此外,事故数最高的路段位于K2118~K2130下坡路段中部. ...
基于交通事故多发位置的区间平均纵坡控制指标研究
1
2021
... 纵坡是影响高速公路交通安全的重要指标,坡率与交通事故数正相关[20 ] . 道路纵坡对交通安全的影响,主要用于车速和车辆制动能力. 对于上坡路段,坡率越大,不同车型爬坡能力不同,容易引起速差较大,车辆换道超车概率增加;对于下坡路段,坡率越大、坡长越长,车辆制动行为越频繁,并且制动距离越低. 马聪等[21 ] 对比了曲率半径和道路纵坡对事故预测的影响,认为道路纵坡对山区高速公路的影响更高、Ahmed等[22 ] 的研究结果显示下坡路段较上坡路段事故率更高,对比道路平均纵坡与交通事故的分布规律,如图4 所示. 结果表明平均纵坡 $\bar i$ [23 ] 的研究结果一致. 此外,事故数最高的路段位于K2118~K2130下坡路段中部. ...
Driver behaviour at horizontal curves: risk compensation and the margin of safety
1
1992
... 曲线段行车风险主要包含侧滑、侧偏和侧翻等侧向风险,风险大小与道路半径呈负相关[24 -25 ] . 为了对比道路半径对交通事故的影响,取道路不设超高的圆曲线最小半径规范值R *[26 ] 与道路平面半径R 比值为道路平面曲率参数α : ...
基于行车动力学的高速公路积水路段行车风险分析
1
2019
... 曲线段行车风险主要包含侧滑、侧偏和侧翻等侧向风险,风险大小与道路半径呈负相关[24 -25 ] . 为了对比道路半径对交通事故的影响,取道路不设超高的圆曲线最小半径规范值R *[26 ] 与道路平面半径R 比值为道路平面曲率参数α : ...
基于行车动力学的高速公路积水路段行车风险分析
1
2019
... 曲线段行车风险主要包含侧滑、侧偏和侧翻等侧向风险,风险大小与道路半径呈负相关[24 -25 ] . 为了对比道路半径对交通事故的影响,取道路不设超高的圆曲线最小半径规范值R *[26 ] 与道路平面半径R 比值为道路平面曲率参数α : ...
1
... 曲线段行车风险主要包含侧滑、侧偏和侧翻等侧向风险,风险大小与道路半径呈负相关[24 -25 ] . 为了对比道路半径对交通事故的影响,取道路不设超高的圆曲线最小半径规范值R *[26 ] 与道路平面半径R 比值为道路平面曲率参数α : ...
Considerations on speed selection and risk homeostasis in driving
1
1988
... 在道路行驶过程中的车辆可以分为“目标车辆”与“环境车辆”,被观察的单个车辆为目标车辆,除去目标车辆之外的所有车辆共同组成环境车辆. 由驾驶人或自动驾驶系统所控制的目标车辆,能够通过识别与周围车辆速差和距离,对行车风险进行感知[27 ] . 在行驶过程中,目标车辆与环境车辆的相对速度越小,即与环境车辆速度越接近,事故风险越低[28 ] ;目标车辆与环境车辆的绝对速度越低,车辆制动所需距离越短,同时事故严重程度越低[29 ] . 舒适性也是风险感知的一种,车辆在行驶过程中加速度和离心力对驾驶人舒适性造成影响[30 ] . 行车风险除去需要遵循上述内容外,还会受道路线形、构造物、交通管制、气象及交通流措施等多类因素共同影响. 在感知到风险后,驾驶人会通过控制车辆速度和行驶轨迹,以避免产生交通事故. 结合速度数据分析结果,可以假设在自由流状态下,相似条件和环境下的车速选择趋近相同,即同一时间段和同一路段内多数车辆速度趋近一致[31 -32 ] . ...
Evaluation of the impacts of traffic states on crash risks on freeways
1
2012
... 在道路行驶过程中的车辆可以分为“目标车辆”与“环境车辆”,被观察的单个车辆为目标车辆,除去目标车辆之外的所有车辆共同组成环境车辆. 由驾驶人或自动驾驶系统所控制的目标车辆,能够通过识别与周围车辆速差和距离,对行车风险进行感知[27 ] . 在行驶过程中,目标车辆与环境车辆的相对速度越小,即与环境车辆速度越接近,事故风险越低[28 ] ;目标车辆与环境车辆的绝对速度越低,车辆制动所需距离越短,同时事故严重程度越低[29 ] . 舒适性也是风险感知的一种,车辆在行驶过程中加速度和离心力对驾驶人舒适性造成影响[30 ] . 行车风险除去需要遵循上述内容外,还会受道路线形、构造物、交通管制、气象及交通流措施等多类因素共同影响. 在感知到风险后,驾驶人会通过控制车辆速度和行驶轨迹,以避免产生交通事故. 结合速度数据分析结果,可以假设在自由流状态下,相似条件和环境下的车速选择趋近相同,即同一时间段和同一路段内多数车辆速度趋近一致[31 -32 ] . ...
Effect of speed, flow, and geometric characteristics on crash frequency for two-lane highways
1
2000
... 在道路行驶过程中的车辆可以分为“目标车辆”与“环境车辆”,被观察的单个车辆为目标车辆,除去目标车辆之外的所有车辆共同组成环境车辆. 由驾驶人或自动驾驶系统所控制的目标车辆,能够通过识别与周围车辆速差和距离,对行车风险进行感知[27 ] . 在行驶过程中,目标车辆与环境车辆的相对速度越小,即与环境车辆速度越接近,事故风险越低[28 ] ;目标车辆与环境车辆的绝对速度越低,车辆制动所需距离越短,同时事故严重程度越低[29 ] . 舒适性也是风险感知的一种,车辆在行驶过程中加速度和离心力对驾驶人舒适性造成影响[30 ] . 行车风险除去需要遵循上述内容外,还会受道路线形、构造物、交通管制、气象及交通流措施等多类因素共同影响. 在感知到风险后,驾驶人会通过控制车辆速度和行驶轨迹,以避免产生交通事故. 结合速度数据分析结果,可以假设在自由流状态下,相似条件和环境下的车速选择趋近相同,即同一时间段和同一路段内多数车辆速度趋近一致[31 -32 ] . ...
The influence of combined alignments on lateral acceleration on mountainous freeways: a driving simulator study
1
2015
... 在道路行驶过程中的车辆可以分为“目标车辆”与“环境车辆”,被观察的单个车辆为目标车辆,除去目标车辆之外的所有车辆共同组成环境车辆. 由驾驶人或自动驾驶系统所控制的目标车辆,能够通过识别与周围车辆速差和距离,对行车风险进行感知[27 ] . 在行驶过程中,目标车辆与环境车辆的相对速度越小,即与环境车辆速度越接近,事故风险越低[28 ] ;目标车辆与环境车辆的绝对速度越低,车辆制动所需距离越短,同时事故严重程度越低[29 ] . 舒适性也是风险感知的一种,车辆在行驶过程中加速度和离心力对驾驶人舒适性造成影响[30 ] . 行车风险除去需要遵循上述内容外,还会受道路线形、构造物、交通管制、气象及交通流措施等多类因素共同影响. 在感知到风险后,驾驶人会通过控制车辆速度和行驶轨迹,以避免产生交通事故. 结合速度数据分析结果,可以假设在自由流状态下,相似条件和环境下的车速选择趋近相同,即同一时间段和同一路段内多数车辆速度趋近一致[31 -32 ] . ...
公路运行速度特征研究
1
2010
... 在道路行驶过程中的车辆可以分为“目标车辆”与“环境车辆”,被观察的单个车辆为目标车辆,除去目标车辆之外的所有车辆共同组成环境车辆. 由驾驶人或自动驾驶系统所控制的目标车辆,能够通过识别与周围车辆速差和距离,对行车风险进行感知[27 ] . 在行驶过程中,目标车辆与环境车辆的相对速度越小,即与环境车辆速度越接近,事故风险越低[28 ] ;目标车辆与环境车辆的绝对速度越低,车辆制动所需距离越短,同时事故严重程度越低[29 ] . 舒适性也是风险感知的一种,车辆在行驶过程中加速度和离心力对驾驶人舒适性造成影响[30 ] . 行车风险除去需要遵循上述内容外,还会受道路线形、构造物、交通管制、气象及交通流措施等多类因素共同影响. 在感知到风险后,驾驶人会通过控制车辆速度和行驶轨迹,以避免产生交通事故. 结合速度数据分析结果,可以假设在自由流状态下,相似条件和环境下的车速选择趋近相同,即同一时间段和同一路段内多数车辆速度趋近一致[31 -32 ] . ...
公路运行速度特征研究
1
2010
... 在道路行驶过程中的车辆可以分为“目标车辆”与“环境车辆”,被观察的单个车辆为目标车辆,除去目标车辆之外的所有车辆共同组成环境车辆. 由驾驶人或自动驾驶系统所控制的目标车辆,能够通过识别与周围车辆速差和距离,对行车风险进行感知[27 ] . 在行驶过程中,目标车辆与环境车辆的相对速度越小,即与环境车辆速度越接近,事故风险越低[28 ] ;目标车辆与环境车辆的绝对速度越低,车辆制动所需距离越短,同时事故严重程度越低[29 ] . 舒适性也是风险感知的一种,车辆在行驶过程中加速度和离心力对驾驶人舒适性造成影响[30 ] . 行车风险除去需要遵循上述内容外,还会受道路线形、构造物、交通管制、气象及交通流措施等多类因素共同影响. 在感知到风险后,驾驶人会通过控制车辆速度和行驶轨迹,以避免产生交通事故. 结合速度数据分析结果,可以假设在自由流状态下,相似条件和环境下的车速选择趋近相同,即同一时间段和同一路段内多数车辆速度趋近一致[31 -32 ] . ...
降雨条件下高速公路车辆行驶速度特性
1
2015
... 在道路行驶过程中的车辆可以分为“目标车辆”与“环境车辆”,被观察的单个车辆为目标车辆,除去目标车辆之外的所有车辆共同组成环境车辆. 由驾驶人或自动驾驶系统所控制的目标车辆,能够通过识别与周围车辆速差和距离,对行车风险进行感知[27 ] . 在行驶过程中,目标车辆与环境车辆的相对速度越小,即与环境车辆速度越接近,事故风险越低[28 ] ;目标车辆与环境车辆的绝对速度越低,车辆制动所需距离越短,同时事故严重程度越低[29 ] . 舒适性也是风险感知的一种,车辆在行驶过程中加速度和离心力对驾驶人舒适性造成影响[30 ] . 行车风险除去需要遵循上述内容外,还会受道路线形、构造物、交通管制、气象及交通流措施等多类因素共同影响. 在感知到风险后,驾驶人会通过控制车辆速度和行驶轨迹,以避免产生交通事故. 结合速度数据分析结果,可以假设在自由流状态下,相似条件和环境下的车速选择趋近相同,即同一时间段和同一路段内多数车辆速度趋近一致[31 -32 ] . ...
降雨条件下高速公路车辆行驶速度特性
1
2015
... 在道路行驶过程中的车辆可以分为“目标车辆”与“环境车辆”,被观察的单个车辆为目标车辆,除去目标车辆之外的所有车辆共同组成环境车辆. 由驾驶人或自动驾驶系统所控制的目标车辆,能够通过识别与周围车辆速差和距离,对行车风险进行感知[27 ] . 在行驶过程中,目标车辆与环境车辆的相对速度越小,即与环境车辆速度越接近,事故风险越低[28 ] ;目标车辆与环境车辆的绝对速度越低,车辆制动所需距离越短,同时事故严重程度越低[29 ] . 舒适性也是风险感知的一种,车辆在行驶过程中加速度和离心力对驾驶人舒适性造成影响[30 ] . 行车风险除去需要遵循上述内容外,还会受道路线形、构造物、交通管制、气象及交通流措施等多类因素共同影响. 在感知到风险后,驾驶人会通过控制车辆速度和行驶轨迹,以避免产生交通事故. 结合速度数据分析结果,可以假设在自由流状态下,相似条件和环境下的车速选择趋近相同,即同一时间段和同一路段内多数车辆速度趋近一致[31 -32 ] . ...
Effect of horizontal curve geometry on vehicle speed distribution: a four-lane divided highway study
1
2020
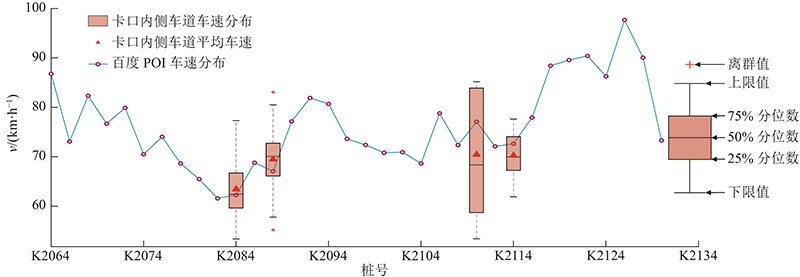
... 关于交通流速度的统计指标较多,例如15%位车速、50%位车速、85%位车速. 已有研究证明[33 -34 ] ,在自由流和路段限速状态下,车道断面速度频率分布符合正态分布,在限速状态下车速离散性降低. 平均速度能够更好地描述驾驶人的速度选择趋势,因此基于平均速度构建速度势能指标. ...
The effect of posted speed limit on the dispersion of traffic flow speed
1
2019
... 关于交通流速度的统计指标较多,例如15%位车速、50%位车速、85%位车速. 已有研究证明[33 -34 ] ,在自由流和路段限速状态下,车道断面速度频率分布符合正态分布,在限速状态下车速离散性降低. 平均速度能够更好地描述驾驶人的速度选择趋势,因此基于平均速度构建速度势能指标. ...
Speed and safety
1
2009
... 速差和事故率之间的关系一直是交通安全研究的重点,相关学者提出Solomon曲线等一系列成果[35 ] ,通过速度这一指标,将微观风险模型与交通事故统计联系起来[36 ] . 根据第2章数据分析可知,速度梯度、道路半径、纵坡与交通事故分布具有一定相关性. 纵向行车风险以跟驰过程中的追尾事故风险为主,主要风险表征为纵向安全距离不足,所需的纵向安全距离受前、后车辆速差和制动性能影响. 道路纵坡影响车辆制动能力,速度梯度直接表征所需的纵向安全车距. 侧向行车风险以侧向滑移为主,这样容易发生侧撞事故,主要风险表征为侧向安全距离不足. 根据波良可夫模型、斯特拉霍夫经验公式[37 ] 及Qu等[38 ] 的研究,侧向相邻车辆所需的侧向安全距离与车辆的速差存在正相关,即相同侧向车距情况下相邻车辆速差越大,所需安全车距越大. 车辆速差与距离的比值为侧向速度梯度,侧向速度梯度越大,行车风险越高. ...
1
... 速差和事故率之间的关系一直是交通安全研究的重点,相关学者提出Solomon曲线等一系列成果[35 ] ,通过速度这一指标,将微观风险模型与交通事故统计联系起来[36 ] . 根据第2章数据分析可知,速度梯度、道路半径、纵坡与交通事故分布具有一定相关性. 纵向行车风险以跟驰过程中的追尾事故风险为主,主要风险表征为纵向安全距离不足,所需的纵向安全距离受前、后车辆速差和制动性能影响. 道路纵坡影响车辆制动能力,速度梯度直接表征所需的纵向安全车距. 侧向行车风险以侧向滑移为主,这样容易发生侧撞事故,主要风险表征为侧向安全距离不足. 根据波良可夫模型、斯特拉霍夫经验公式[37 ] 及Qu等[38 ] 的研究,侧向相邻车辆所需的侧向安全距离与车辆的速差存在正相关,即相同侧向车距情况下相邻车辆速差越大,所需安全车距越大. 车辆速差与距离的比值为侧向速度梯度,侧向速度梯度越大,行车风险越高. ...
互通式立交单车道匝道宽度取值与单出入口优化设计
1
2021
... 速差和事故率之间的关系一直是交通安全研究的重点,相关学者提出Solomon曲线等一系列成果[35 ] ,通过速度这一指标,将微观风险模型与交通事故统计联系起来[36 ] . 根据第2章数据分析可知,速度梯度、道路半径、纵坡与交通事故分布具有一定相关性. 纵向行车风险以跟驰过程中的追尾事故风险为主,主要风险表征为纵向安全距离不足,所需的纵向安全距离受前、后车辆速差和制动性能影响. 道路纵坡影响车辆制动能力,速度梯度直接表征所需的纵向安全车距. 侧向行车风险以侧向滑移为主,这样容易发生侧撞事故,主要风险表征为侧向安全距离不足. 根据波良可夫模型、斯特拉霍夫经验公式[37 ] 及Qu等[38 ] 的研究,侧向相邻车辆所需的侧向安全距离与车辆的速差存在正相关,即相同侧向车距情况下相邻车辆速差越大,所需安全车距越大. 车辆速差与距离的比值为侧向速度梯度,侧向速度梯度越大,行车风险越高. ...
互通式立交单车道匝道宽度取值与单出入口优化设计
1
2021
... 速差和事故率之间的关系一直是交通安全研究的重点,相关学者提出Solomon曲线等一系列成果[35 ] ,通过速度这一指标,将微观风险模型与交通事故统计联系起来[36 ] . 根据第2章数据分析可知,速度梯度、道路半径、纵坡与交通事故分布具有一定相关性. 纵向行车风险以跟驰过程中的追尾事故风险为主,主要风险表征为纵向安全距离不足,所需的纵向安全距离受前、后车辆速差和制动性能影响. 道路纵坡影响车辆制动能力,速度梯度直接表征所需的纵向安全车距. 侧向行车风险以侧向滑移为主,这样容易发生侧撞事故,主要风险表征为侧向安全距离不足. 根据波良可夫模型、斯特拉霍夫经验公式[37 ] 及Qu等[38 ] 的研究,侧向相邻车辆所需的侧向安全距离与车辆的速差存在正相关,即相同侧向车距情况下相邻车辆速差越大,所需安全车距越大. 车辆速差与距离的比值为侧向速度梯度,侧向速度梯度越大,行车风险越高. ...
Modeling of car-following required safe distance based on molecular dynamics
1
2014
... 速差和事故率之间的关系一直是交通安全研究的重点,相关学者提出Solomon曲线等一系列成果[35 ] ,通过速度这一指标,将微观风险模型与交通事故统计联系起来[36 ] . 根据第2章数据分析可知,速度梯度、道路半径、纵坡与交通事故分布具有一定相关性. 纵向行车风险以跟驰过程中的追尾事故风险为主,主要风险表征为纵向安全距离不足,所需的纵向安全距离受前、后车辆速差和制动性能影响. 道路纵坡影响车辆制动能力,速度梯度直接表征所需的纵向安全车距. 侧向行车风险以侧向滑移为主,这样容易发生侧撞事故,主要风险表征为侧向安全距离不足. 根据波良可夫模型、斯特拉霍夫经验公式[37 ] 及Qu等[38 ] 的研究,侧向相邻车辆所需的侧向安全距离与车辆的速差存在正相关,即相同侧向车距情况下相邻车辆速差越大,所需安全车距越大. 车辆速差与距离的比值为侧向速度梯度,侧向速度梯度越大,行车风险越高. ...
普通公路车速分布特性影响因素分析
1
2012
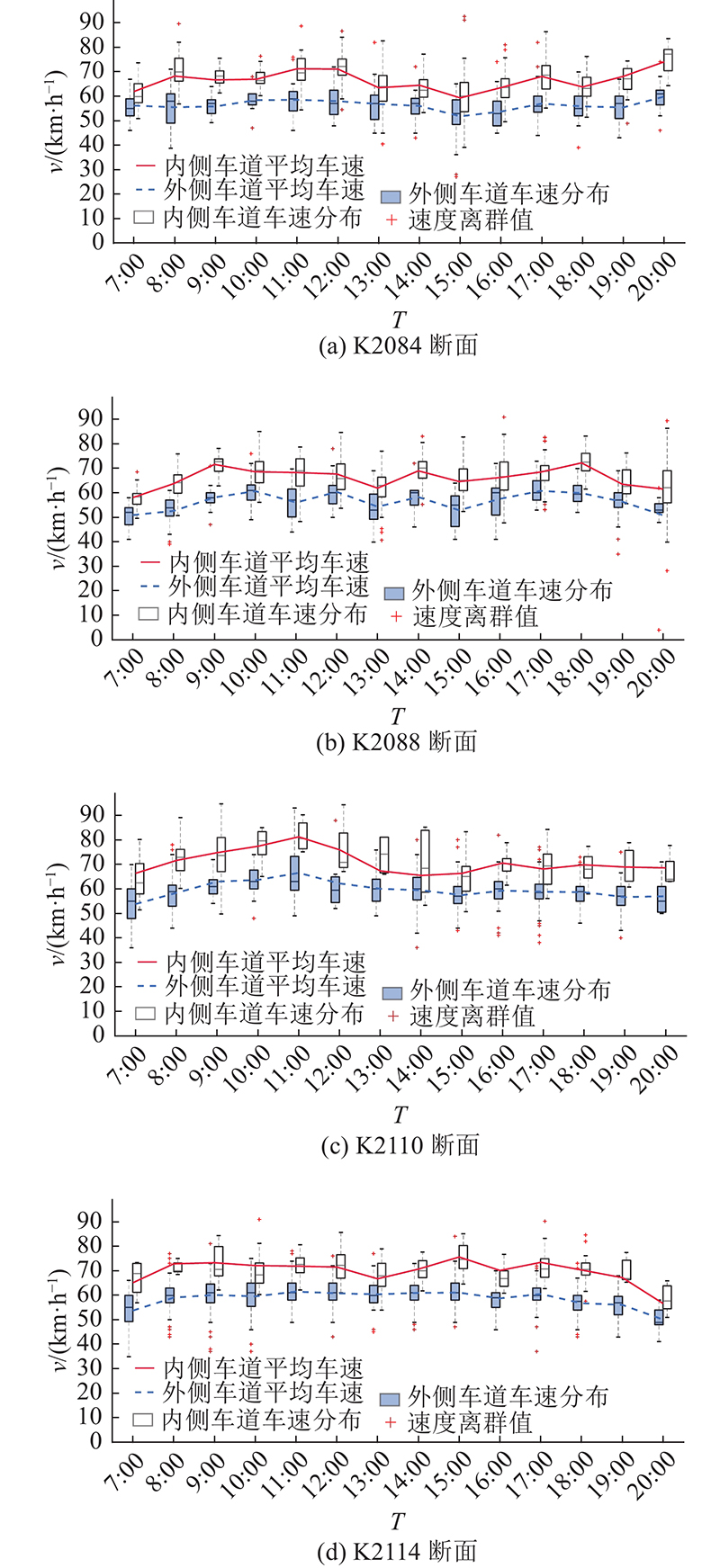
... 相关研究[39 -41 ] 已经证明,不同车道的平均速度沿道路侧向由内向外递减,车道间的速度差与车道数类型、及路段车型呈比例线性相关. 在陆建等[42 ] 和吴明先等[43 ] 的研究结果基础上,结合表3 中的统计结果,可以总结得出:双四车道的内、外侧车道平均速度比例为1.00∶0.85;双向六车道的内、中、外侧车道平均速度比例1.00∶0.90∶0.75. 此外,结合驾驶人的换道和超车行为特性,以及侧向净距对驾驶人的心理效应,车道分隔线位置处车速可以认为是2个车道平均速度的均值;同时考虑到右侧硬路肩与左侧路缘带相比较宽,并且在无障碍物的情况下,速度降低情况较小,侧向分布系数φx 具体取值如表4 所示. ...
普通公路车速分布特性影响因素分析
1
2012
... 相关研究[39 -41 ] 已经证明,不同车道的平均速度沿道路侧向由内向外递减,车道间的速度差与车道数类型、及路段车型呈比例线性相关. 在陆建等[42 ] 和吴明先等[43 ] 的研究结果基础上,结合表3 中的统计结果,可以总结得出:双四车道的内、外侧车道平均速度比例为1.00∶0.85;双向六车道的内、中、外侧车道平均速度比例1.00∶0.90∶0.75. 此外,结合驾驶人的换道和超车行为特性,以及侧向净距对驾驶人的心理效应,车道分隔线位置处车速可以认为是2个车道平均速度的均值;同时考虑到右侧硬路肩与左侧路缘带相比较宽,并且在无障碍物的情况下,速度降低情况较小,侧向分布系数φx 具体取值如表4 所示. ...
Study of speed-flow relationships on individual freeway lanes
0
1997
Modeling the endogeneity of lane-mean speeds and lane-speed deviations: a structural equations approach
1
1998
... 相关研究[39 -41 ] 已经证明,不同车道的平均速度沿道路侧向由内向外递减,车道间的速度差与车道数类型、及路段车型呈比例线性相关. 在陆建等[42 ] 和吴明先等[43 ] 的研究结果基础上,结合表3 中的统计结果,可以总结得出:双四车道的内、外侧车道平均速度比例为1.00∶0.85;双向六车道的内、中、外侧车道平均速度比例1.00∶0.90∶0.75. 此外,结合驾驶人的换道和超车行为特性,以及侧向净距对驾驶人的心理效应,车道分隔线位置处车速可以认为是2个车道平均速度的均值;同时考虑到右侧硬路肩与左侧路缘带相比较宽,并且在无障碍物的情况下,速度降低情况较小,侧向分布系数φx 具体取值如表4 所示. ...
普通公路车速分布特性的回归分析
1
2012
... 相关研究[39 -41 ] 已经证明,不同车道的平均速度沿道路侧向由内向外递减,车道间的速度差与车道数类型、及路段车型呈比例线性相关. 在陆建等[42 ] 和吴明先等[43 ] 的研究结果基础上,结合表3 中的统计结果,可以总结得出:双四车道的内、外侧车道平均速度比例为1.00∶0.85;双向六车道的内、中、外侧车道平均速度比例1.00∶0.90∶0.75. 此外,结合驾驶人的换道和超车行为特性,以及侧向净距对驾驶人的心理效应,车道分隔线位置处车速可以认为是2个车道平均速度的均值;同时考虑到右侧硬路肩与左侧路缘带相比较宽,并且在无障碍物的情况下,速度降低情况较小,侧向分布系数φx 具体取值如表4 所示. ...
普通公路车速分布特性的回归分析
1
2012
... 相关研究[39 -41 ] 已经证明,不同车道的平均速度沿道路侧向由内向外递减,车道间的速度差与车道数类型、及路段车型呈比例线性相关. 在陆建等[42 ] 和吴明先等[43 ] 的研究结果基础上,结合表3 中的统计结果,可以总结得出:双四车道的内、外侧车道平均速度比例为1.00∶0.85;双向六车道的内、中、外侧车道平均速度比例1.00∶0.90∶0.75. 此外,结合驾驶人的换道和超车行为特性,以及侧向净距对驾驶人的心理效应,车道分隔线位置处车速可以认为是2个车道平均速度的均值;同时考虑到右侧硬路肩与左侧路缘带相比较宽,并且在无障碍物的情况下,速度降低情况较小,侧向分布系数φx 具体取值如表4 所示. ...
多车道高速公路不同车道运行速度的特点
1
2021
... 相关研究[39 -41 ] 已经证明,不同车道的平均速度沿道路侧向由内向外递减,车道间的速度差与车道数类型、及路段车型呈比例线性相关. 在陆建等[42 ] 和吴明先等[43 ] 的研究结果基础上,结合表3 中的统计结果,可以总结得出:双四车道的内、外侧车道平均速度比例为1.00∶0.85;双向六车道的内、中、外侧车道平均速度比例1.00∶0.90∶0.75. 此外,结合驾驶人的换道和超车行为特性,以及侧向净距对驾驶人的心理效应,车道分隔线位置处车速可以认为是2个车道平均速度的均值;同时考虑到右侧硬路肩与左侧路缘带相比较宽,并且在无障碍物的情况下,速度降低情况较小,侧向分布系数φx 具体取值如表4 所示. ...
多车道高速公路不同车道运行速度的特点
1
2021
... 相关研究[39 -41 ] 已经证明,不同车道的平均速度沿道路侧向由内向外递减,车道间的速度差与车道数类型、及路段车型呈比例线性相关. 在陆建等[42 ] 和吴明先等[43 ] 的研究结果基础上,结合表3 中的统计结果,可以总结得出:双四车道的内、外侧车道平均速度比例为1.00∶0.85;双向六车道的内、中、外侧车道平均速度比例1.00∶0.90∶0.75. 此外,结合驾驶人的换道和超车行为特性,以及侧向净距对驾驶人的心理效应,车道分隔线位置处车速可以认为是2个车道平均速度的均值;同时考虑到右侧硬路肩与左侧路缘带相比较宽,并且在无障碍物的情况下,速度降低情况较小,侧向分布系数φx 具体取值如表4 所示. ...
高速公路车速离散性与交通事故的关系及车速管理研究
1
2004
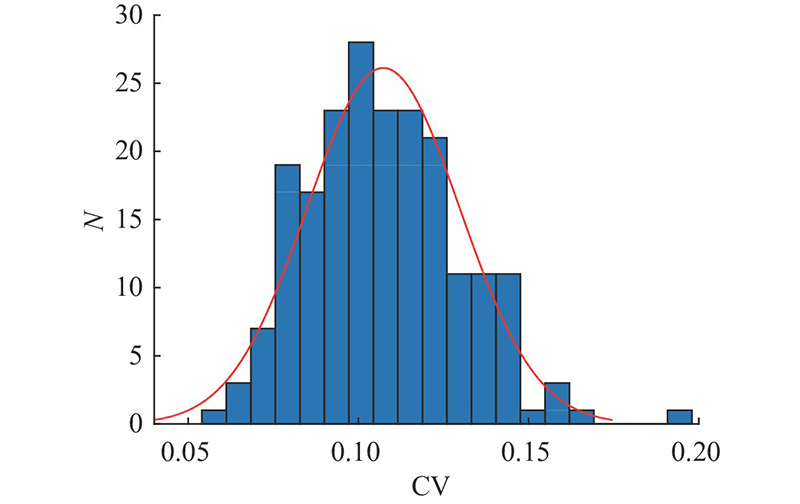
... 速度风险势场强度表征车辆受到“吸引力”和“排斥力”的大小和方向,即环境车辆平均速度对驾驶人速度选择的影响大小. 速度风险势场强度与车速的离散性相关,速度离散性越小驾驶人速度选择趋近平均速度的几率越大. 速度离散性的描述指标主要采用速度标准差sd和速度变异系数CV,其中速度变异系数CV指速度标准差与平均速度 $\bar v$ [44 ] . 由于离散度越大,速度风险势场强度越小,因此采用速度变异系数CV的倒数作为速度风险势场强度系数η : ...
高速公路车速离散性与交通事故的关系及车速管理研究
1
2004
... 速度风险势场强度表征车辆受到“吸引力”和“排斥力”的大小和方向,即环境车辆平均速度对驾驶人速度选择的影响大小. 速度风险势场强度与车速的离散性相关,速度离散性越小驾驶人速度选择趋近平均速度的几率越大. 速度离散性的描述指标主要采用速度标准差sd和速度变异系数CV,其中速度变异系数CV指速度标准差与平均速度 $\bar v$ [44 ] . 由于离散度越大,速度风险势场强度越小,因此采用速度变异系数CV的倒数作为速度风险势场强度系数η : ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}