

在原子能科学发展的早期,核物质的放射性相对较低,操作任务相对简单. 1949年,美国阿贡实验室开发了世界上第1台M1机械式主从类操作机,其具备人手基本的操作功能,之后数十年,相继形成了美国ANL系列、意大利Mascot系列、德国EMSM系列等较为早期的电随动主从机械手用于满足当时的操作需求[5]. 应用于现代后处理领域的机械臂须具备较高的辐射耐受能力,因此,减少辐射环境下的电子器件或提高电子器件的耐辐射能力一直受到机器人领域研究者的关注. Measson等[6]开发了液压系统外置的MAESTRO液压机械臂并对液压伺服控制系统进行研究. Geffard等[7]开发设计了RX系列机械臂并对其内部的电子器件进行辐射加固处理. 其中MAESTRO机械臂由于存在漏液风险,并不适用于在高放射性热室中长期工作,同时MAESTRO与RX系列机械臂由于液压与电气伺服系统的限制,其主体耐辐射剂量均为10 kGy,不适用于国内工作需求耐辐射剂量≥1 MGy的使用场景. 为了提升高放射环境下机械臂的耐辐射能力,通常采用以机械结构为主体的设计来对抗辐射影响,并对动力部分进行改造,如Lee等[8-9]与Ray等[10]基于钢丝绳式电随动机械臂进行改造研究,将集成屏蔽的动力通过钢丝绳传递至各个关节. 由于钢丝绳式主从机械臂整体刚度偏低,且存在脱绳风险,目前国内应用较多的电随动主从机械臂为全齿轮传动结构. 李贵生等[11]对该机械臂常出现的诸多机械与电气故障进行了调试与分析. 张国伟等[12]对该主从手进行了主从控制系统改造,提高了该主从手的可靠性. 张显鹏等[13]对国产ZC系列机械臂进行了遥控改造,扩大了操作范围. 但目前对该系列机械臂的改造并未涉及更改其机械结构,其仍存在关节外露、工作空间受限的问题,且由于全齿轮耦合的复杂关系,相关研究均未涉及能提升后处理流程效率的机械臂自动化功能开发. 针对结构优化与算法开发工作,丁渊明等[14]对机械臂结构进行优化,结合性能指标算法减少了运行能量. 姜宏超等[15]针对模块化机械臂进行算法开发,用以实现执行器的精确定位与运动规划. 徐彦等[16]研究气动自折叠机械臂的驱动和负载性能,实现无电子器件机械臂的特性验证.
目前,尚无能完全满足高放射性环境的动力内置机械臂,而对于无电子器件的机械臂技术的研究较少,主要是基于现有的钢丝绳与全齿轮结构本体展开研究,在保证本体耐辐射能力的基础上进行电气化改造. 本研究在现有应用于热室的机械臂系统研究与相关机械臂结构与算法开发的基础上,重点对符合后处理要求的全齿轮传动机械臂进行结构设计、运动学建模与自动化实现实验研究. 基于热室内机械臂耐辐射性能≥1 MGy、关节密封、各关节理论转角≥360°、满载变形量≤5°、重复定位精度≤0.5 mm等指标要求,提出具备主从功能,且可在高放射复杂环境箱室中进行自动化独立工作的后处理全齿轮传动箱室机械臂原理样机,简称箱室机械臂,相关设计理念与自动化控制逻辑可以为核环境下主从手的设计提供参考.
1. 箱室机械臂原理设计
图 1
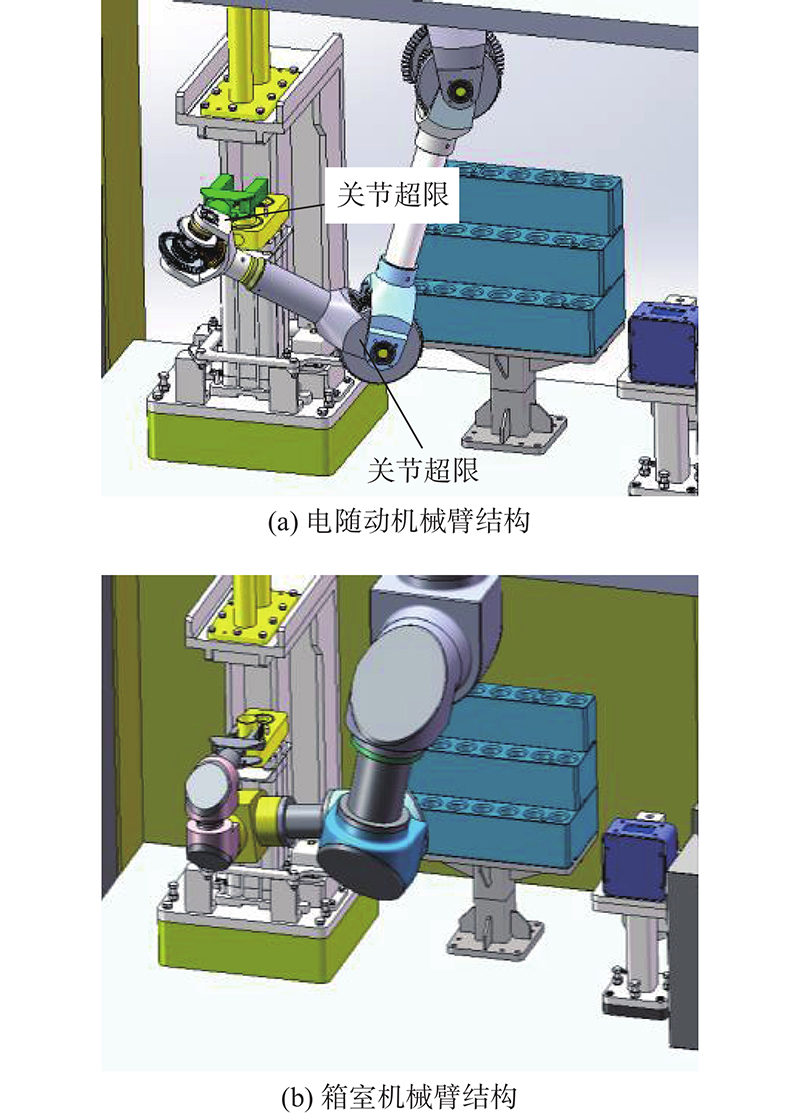
图 1 2种机械臂的结构特点对比
Fig.1 Comparison of structure characteristics of two manipulators
箱室机械臂继承了电随动机械臂的主要优点,即基于动力外置,实现手臂的紧凑结构,并且提高了负载比例、辐照环境下纯机械结构带来的抗辐照能力与可靠性、全齿轮传动结构的高刚度特性等;同时吸收UR机械臂关节无限制转动结构与旋转密封结构的优点,解决了电随动机械臂如图1(a)所示因结构限制而出现的腕关节结构易干涉、关节齿轮外露问题,优化了关节齿轮的工作环境.
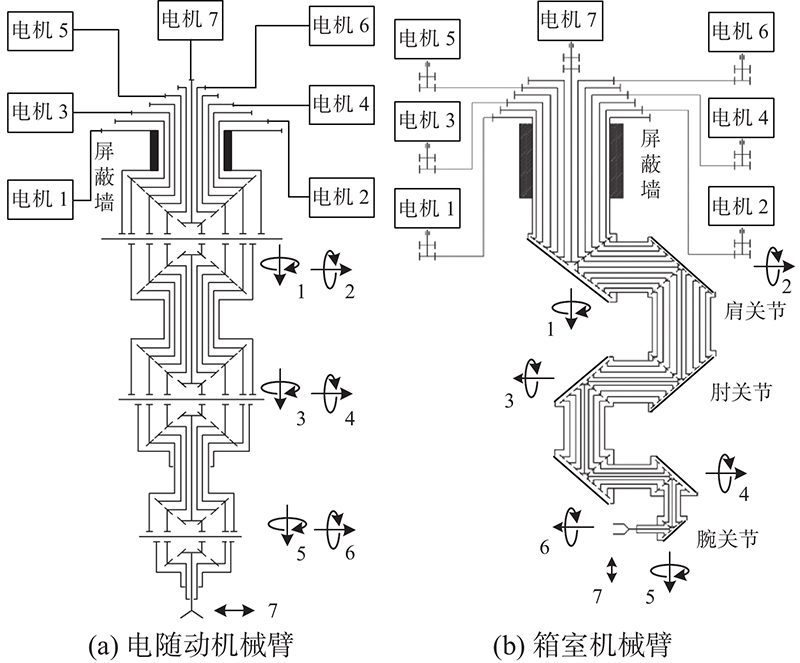
如图2所示,电随动机械臂齿轮采用差动联动并存的方式进行运动传递,关节的运动需要2组齿轮配合实现. 箱室机械臂采用逐级联动的方式进行运动传递,关节运动只需1组齿轮配合实现,使整个机械臂的齿轮组耦合关系更清晰.
图 2
如图3所示,箱室机械臂的动力集中布局于外置电机箱中,包含对应机械臂7个自由度的7个伺服电机. 伺服电机的动力通过传动箱中的同心传动轴系传递给各个关节,以驱动对应的运动自由度.
图 3
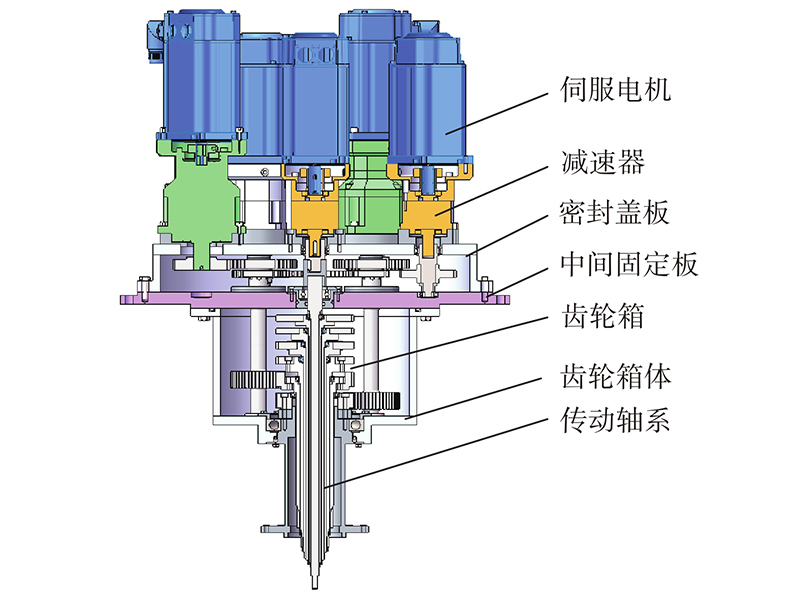
图 3 箱室机械臂的外置动力组件
Fig.3 External integrated power assembly of manipulator for hot cell
图 4
图 4 箱室机械臂的运动传递结构
Fig.4 Motion transmission structure of manipulator for hot cell
2. 全齿轮传动运动算法实现
2.1. 正运动学求解
箱室机械臂的结构是基于传统的UR机械臂运动原理进行了全齿轮传动链耦合设计,首先可以依据D-H参数法建立机械臂各个连杆的坐标系,如图5所示.
图 5
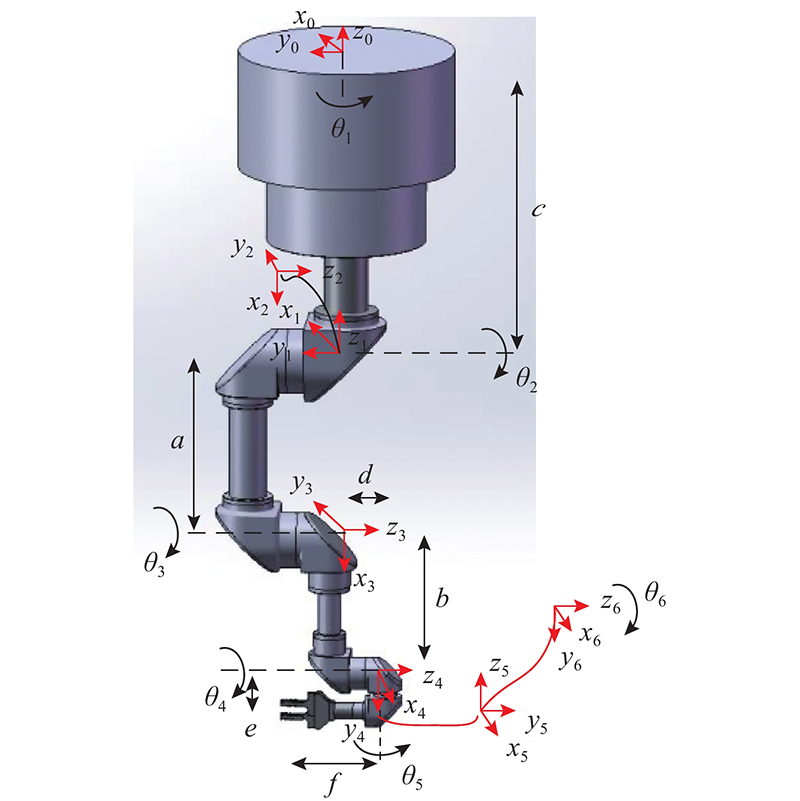
在确定坐标系后,通过连杆参数得到的D-H表如表1所示. 表中,α、θ、a、d表示坐标系之间的变换关系,其中α为绕x轴的转角,θ为绕z轴的转角,a为沿x轴的偏移量,d为沿z轴的偏移量,a、b、c、d、e、f为连杆参数,θ1~θ6为关节转角.
表 1 箱室机械臂的D-H参数表
Tab.1
| i | αi−1/(°) | ai−1/mm | di/mm | θi/(°) |
| 1 | 0 | 0 | −c | θ1 |
| 2 | 90 | 0 | 0 | θ2−90 |
| 3 | 0 | a | 0 | θ3 |
| 4 | 0 | b | d | θ4−90 |
| 5 | 90 | 0 | −e | θ5 |
| 6 | −90 | 0 | −f | θ6 |
机械臂末端连杆坐标系的位姿与关节角度的关系函数如下:
其中,
式中:si表示sin θi,ci表示cos θi,s23表示sin (θ2+θ3), c23表示cos (θ2+θ3), s234表示sin (θ2+θ3+θ4), c234表示cos (θ2+θ3+θ4).
2.2. 逆运动学求解
将式(1)中的
令式(3)两侧矩阵相乘后的第3行第4列元素(后文简称(3,4))相等,可以得到
令
利用三角代换可以得到
将式(1)中的
令式(7)两侧(3,3)相等,通过三角代换可以得到
令式(3)两侧(3,1)相等,三角代换可以得到
式中:
令式(3)两侧(1,3)、(2,3)分别相等,联立得到
式中:θ234为关于θ2、θ3、θ4的函数.
令式(3)两侧(1,4)、(2,4)分别相等,联立得到
式中:
令式(12)左侧等于A,根据三角关系得到
将求得的θ2代入式(3)两侧(1,4)、(2,4)分别相等形成的等式中,可以得到
式中:θ23为关于θ2、θ3的函数,
根据式(11)、(14),可以得到
由式(13)、(14),可以得到
至此,箱室机械臂的6个关节角度均已求出.
2.3. 全齿轮传动链耦合分析
箱室机械臂由于采用多级锥齿轮传动,其关节自由度的控制方式相较于UR机械臂各个关节独立驱动有较大的差异. 通过逆解得到的6个关节角度不能直接用于控制各个关节,须经过全齿轮传动耦合处理之后通过控制电机之间的耦合输出来实现关节转角有序转动. 如图6所示,当电机1在驱动关节1时,代表自由度1的关节罩壳的转动会造成图中蓝色部分齿轮组联动,引起额外的运动. 为了保证机械臂的正常运动,须对联动的齿轮组进行反向转动补偿. 当算法求解得到6个关节转角需求时,该需求对应的电机转角关系将是一个复杂的时变需求,须通过相应算法求解.
图 6
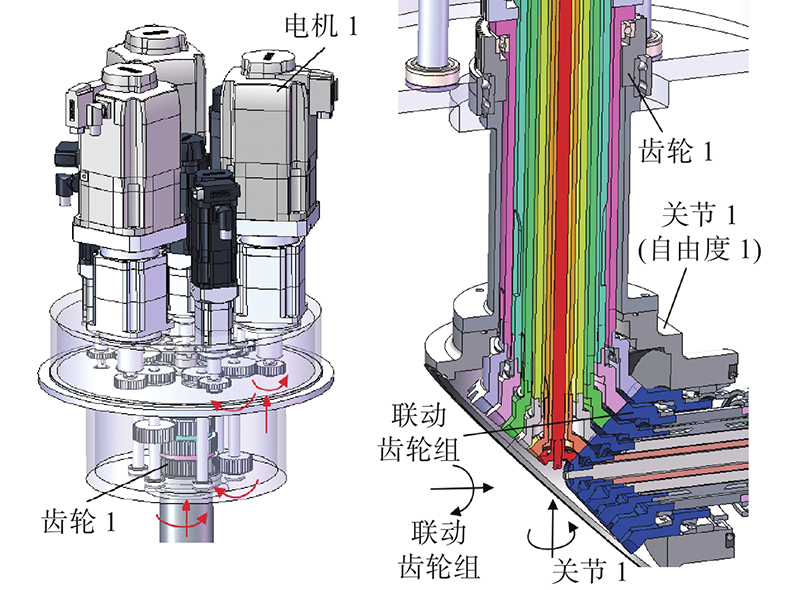
图 6 箱室机械臂的运动耦合补偿原理
Fig.6 Motion coupling compensation principle of manipulator for hot cell
此处将轴径较大的齿轮定义为上级齿轮,经过理论分析,得出结论是在控制过程中,引起关节转动的上级齿轮会引起所有下级齿轮的联动,须对所有下级齿轮进行反向补偿;若上级齿轮只作为运动传递,则无须补偿下级齿轮的运动. 同时,由于机械臂结构中存在驱动轴与传动轴的区分,耦合补偿关系存在正负之分,在经过驱动轴与传动轴关系转换的过程后,kj=−1,在不存在关系转换的情况下,kj=1.
式中:j表示对应电机或关节的序号,i表示传动比,上标d表示电机,
3. 全齿轮传动箱室机械臂特性研究
3.1. 全齿轮传动机械臂可达空间对比分析
将电随动机械臂与箱室机械臂的正运动学算法,基于实际关节角度限制在Matlab软件中编程,求解出末端执行器的空间坐标分布. 采用蒙特卡洛法求得2种机械臂在限定关节角度1的情况下得到的可达空间切面点云分布图,如图7所示.
图 7
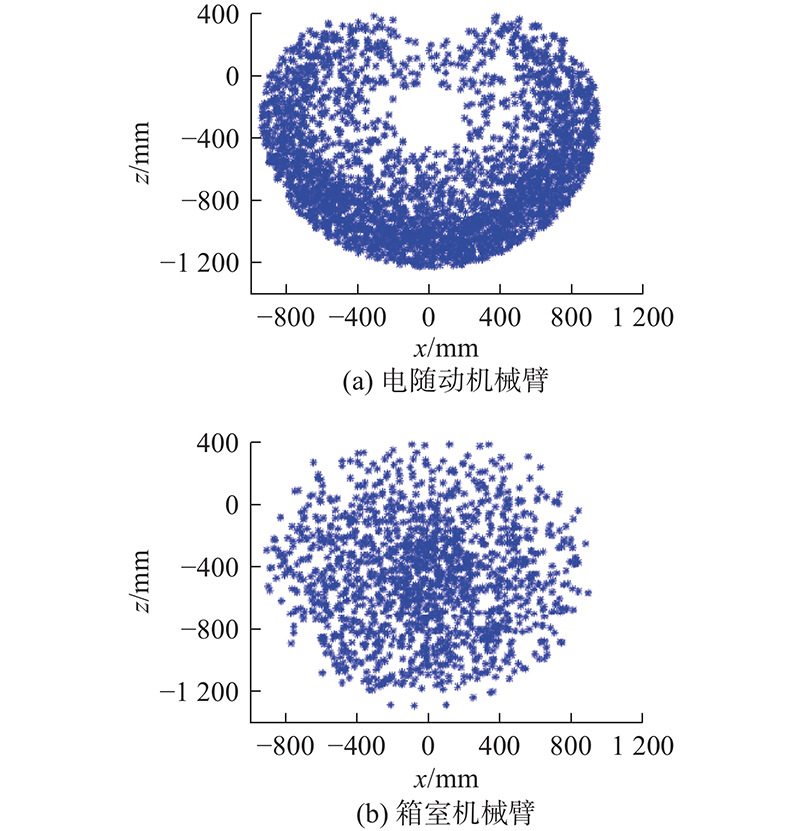
图 7 2种机械臂的可达空间切面分布对比
Fig.7 Contrastive reachable workspace sections of two manipulators
根据点云分布图可以看出,相较于电随动机械臂的环状可达空间分布趋势,箱室机械臂具有更广的球型可达空间,且位置姿态分布均匀. 模拟计算出2种机械臂的可达空间,将两者的可达空间通过三维模型的方式展现,如图8所示,左侧的电随动机械臂由于关节运动角度限制,存在一个内部球型死区,约占总可达空间的20%,而右侧的箱室机械臂则基本无死区.
图 8
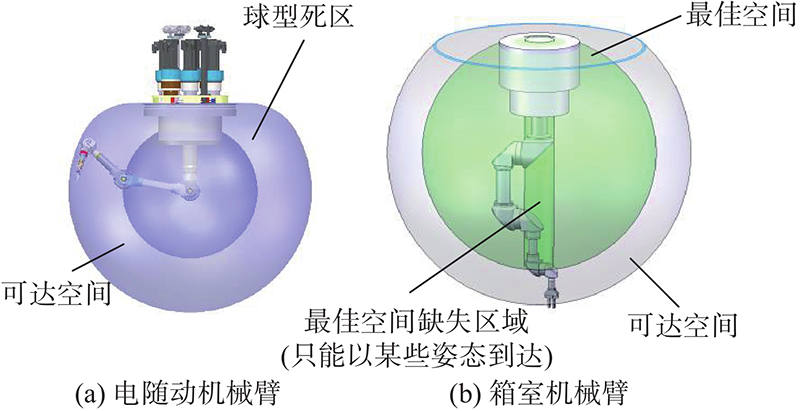
电随动机械臂末端在接近球型死区空间边界区域时,其可达位姿极少,称其为位姿缺失区. 箱室机械臂不存在完全不可达的运动死区,只存在因结构原因导致的可达空间缺失区域,其整体可达空间优于电随动机械臂的.
3.2. 全齿轮传动控制实现
在验证机械臂的运动学算法可行性与可达空间特性后,通过算法进行机械臂耦合传动控制的实现,本研究基于C#语言编写相关的控制程序. 控制程序构架如图9所示,包括用于操作与求解的客户端,用于效果展示的虚拟界面服务端和用于执行的机械臂执行端.
其中,客户端的构架与界面如图10所示,通过文中求解的耦合逆解算法,配合超限算法、择优算法、防撞算法等辅助算法,实现操作界面的数据更新、机械臂末端的位姿控制和数据交互等功能. 客户端中可选模式包括实时运动、预设模式与UR同构联动,用于满足各种实际操作需求.
图 10
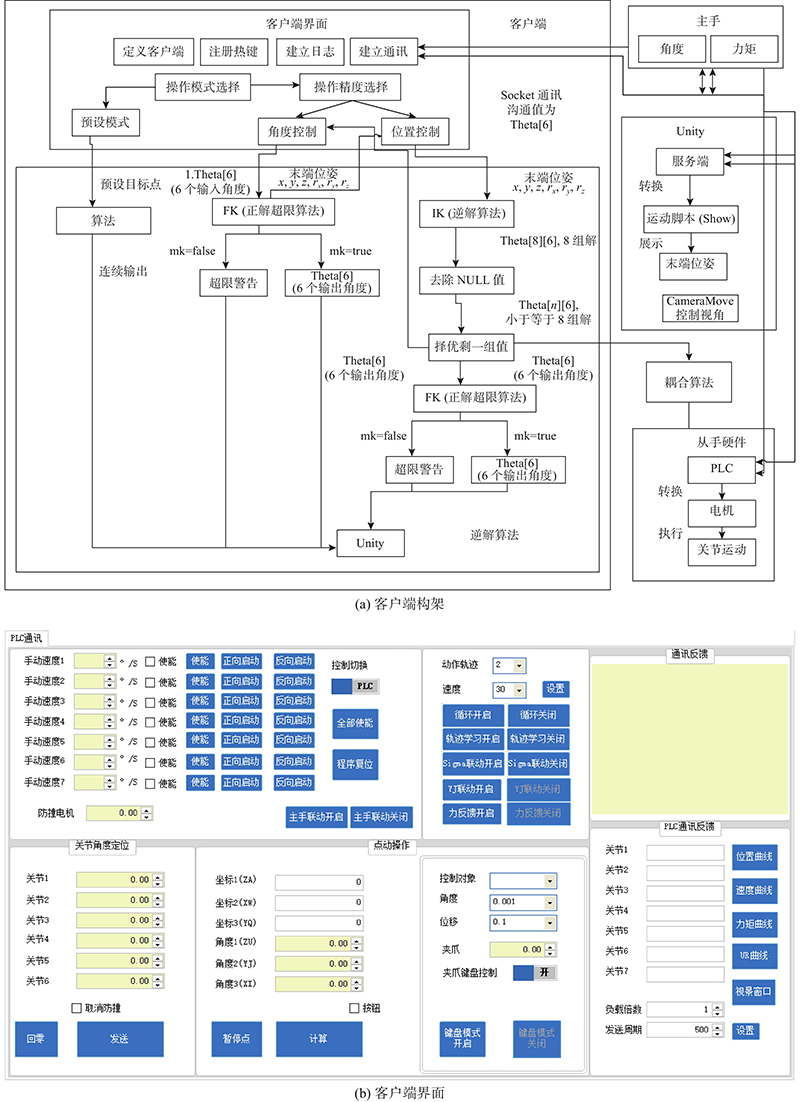
图 10 箱室机械臂的客户端构架与界面
Fig.10 Client architecture and interface of manipulator for hot cell
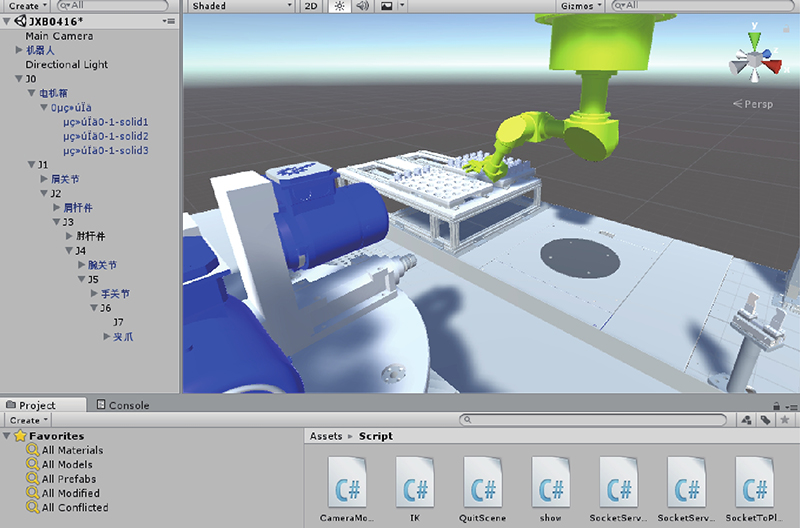
基于Unity界面的三维展示功能,建立虚拟界面,如图11所示. 在建立关节自由度的从属关系后,通过运动控制脚本与通信协议,虚拟界面能基于算法输出机械臂的实际运动状态,实时刷新动画并作出控制判定,实现良好的操作展示效果,降低因热室屏蔽窗带来的视觉扭曲、视角受限问题.
图 9
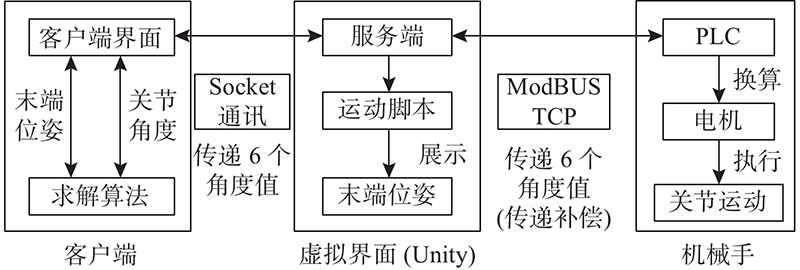
图 9 箱室机械臂的控制构架图
Fig.9 Control architecture diagram of manipulator for hot cell
图 11
3.3. 全齿轮传动机械臂关键指标测试分析
图 12
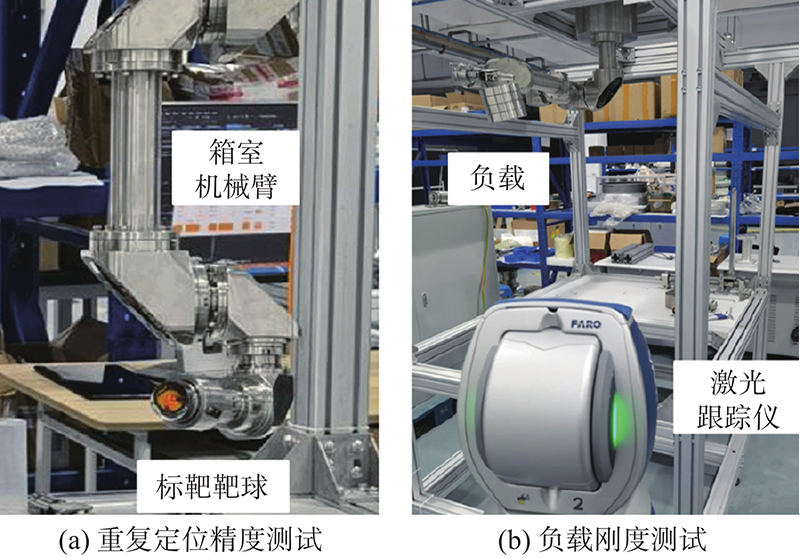
图 13
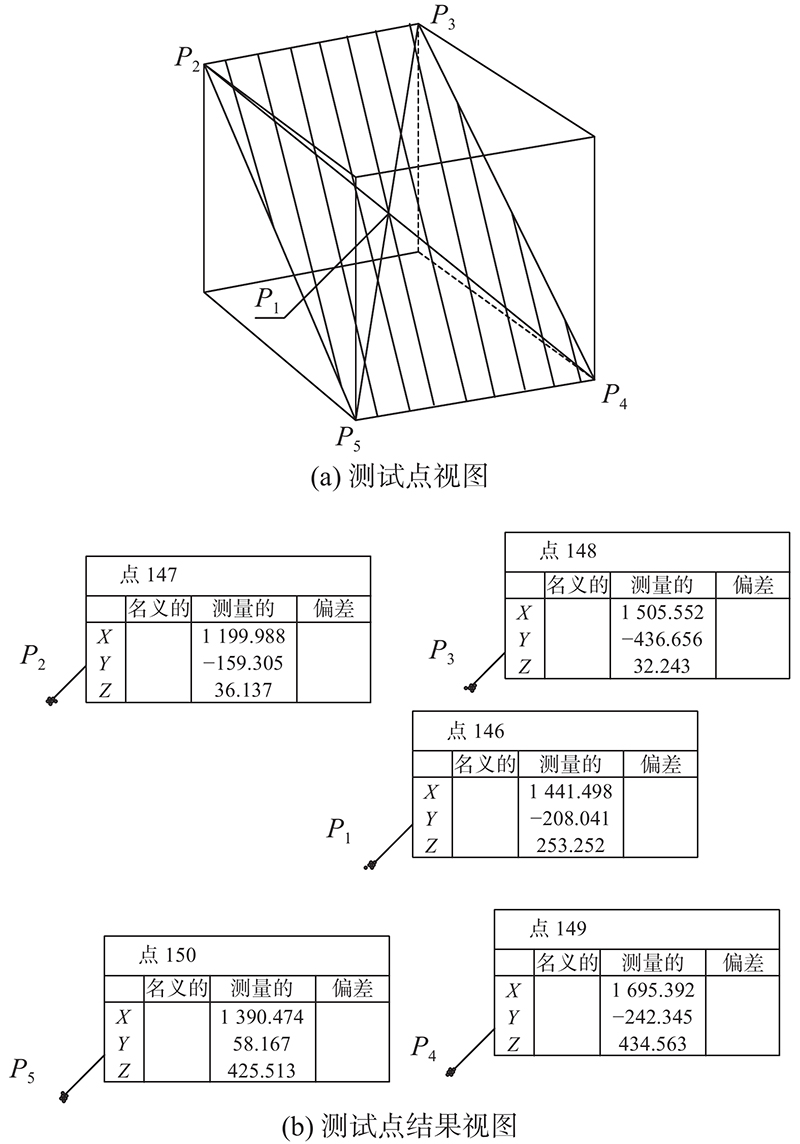
箱室机械臂的相关实验依据《工业机器人性能规范及其试验方法(GB/T 12642—2013)》[18]进行,重复定位精度测试方法依据标准中6.8.6节的跟踪的轨迹进行,其中各点离平均空间位置的偏差量的计算方法如下:
第n个测试点对应的偏差量lj的分布情况如图14所示.
图 14
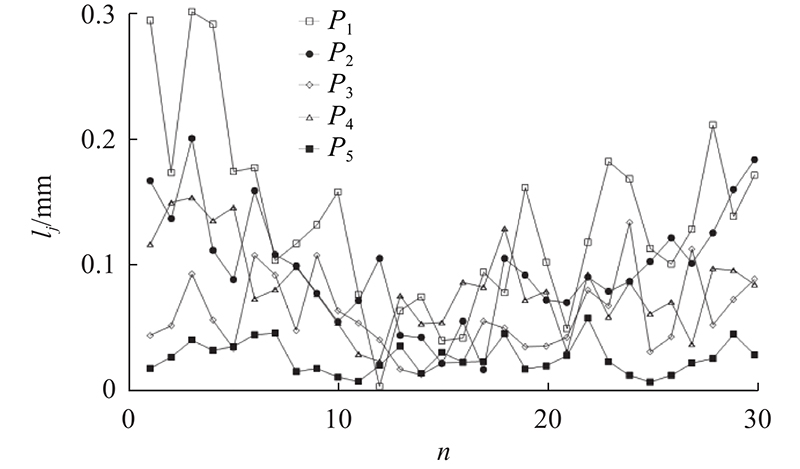
图 14 各测试点离平均空间位置的偏差量
Fig.14 Deviation of each test point from mean spatial position
在得到lj后,进行末端重复定位精度RPl计算,计算方法如下:
最终数据计算结果显示5个测试点的重复定位精度RPl分别为0.358、0.235、0.152、0.189、0.065 mm,均小于设计需求0.5 mm.
采用靶球测试机械臂末端的空间坐标,通过计算分析末端的满载变形量. 测试条件为机械臂水平伸直,各关节轴处于最大受扭状态,测试满载10 kg时与空载状态下末端的空间坐标. 结合测试旋转中心坐标的方式,获取空间等腰三角形的三点坐标,通过三角函数换算得到空间夹角为4°,小于5°的设计需求. 即该机械臂的重复定位精度小于0.5 mm,满载时的负载引起的机械臂转角变形量小于5°. 在保证耐辐射、耐酸蚀前提下,可达空间与刚度指标均优于国际标准[19]中的相关参数.
4. 结 语
结合电随动机械臂与UR机械臂的优点,通过运动学建模与全齿轮传动算法推导,实现箱室机械臂的结构与控制设计. 在结构设计上,该箱室机械臂同时具备动力外置耐辐照、密封关节寿命长、末端灵活、可达空间广等优点. 在控制设计上,相较于电随动机械臂仅具有主从随动功能,额外具备自动化控制功能的箱室机械臂在重复的复杂工况下更具优势. 同时通过虚拟界面进行操作监控可以有效提高操作便捷性.
本研究完成了机械臂的耦合运动学研究,对于耦合动力学领域仍缺少相关的探索,为了提升耦合传动机械臂的动力学特性,下一步将开展机械臂在齿轮系耦合运动工况下的动力学特性研究.
箱室机械臂为应用于高放射环境的机械臂提供了一种新的设计思路,为国内乏燃料后处理流程的自动化积累了有益经验.
参考文献
压水堆核电站乏燃料运输辅助设备设计
[J].DOI:10.3969/j.issn.0258-0926.2012.06.033 [本文引用: 1]
Design of the ancillary equipment for spent fuel transport of PWR nuclear power plant
[J].DOI:10.3969/j.issn.0258-0926.2012.06.033 [本文引用: 1]
乏燃料后处理产业的市场前景及发展路径
[J].
Market prospect and development path for the industry of spent fuel recycle management
[J].
核工业机器人系统中辐照加固技术研究
[J].
Research on radiation reinforcement technology in nuclear industry robot system
[J].
Technology and control for hydraulic manipulators
[J].DOI:10.1016/S0920-3796(03)00280-1 [本文引用: 1]
TAO2000 V2 computer-assisted force feedback telemanipulators used as maintenance and production tools at the AREVA NC-La Hague fuel recycling plant
[J].DOI:10.1002/rob.20426 [本文引用: 1]
Bridge-transported bilateral master-slave servo manipulator system for remote manipulation in spent nuclear fuel processing plant
[J].DOI:10.1002/rob.20419 [本文引用: 1]
Crane system with remote actuation mechanism for use in argon compartment in ACPF hot cell
[J].DOI:10.1016/j.nucengdes.2016.07.011 [本文引用: 1]
中试厂俄罗斯三关节机械手的调试与应用
[J].
Debugging and application of russian three-joint manipulator in the pilot plant
[J].
国产主从式机械手电动部分改为遥控的设计
[J].
Design of remote control to replace electric parts of master-slave manipulator
[J].
串联机械臂结构优化方法
[J].
Optimization method of serial manipulator structure
[J].
六自由度模块化机械臂的逆运动学分析
[J].
Inverse kinematics analysis for 6 degree-of-freedom modular manipulator
[J].
气动软体自折叠机械臂的驱动和负载性能
[J].
Driving and load performances of pneumatic soft self-folding manipulators
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}