

ACC系统大致可分为2种[8]:1)传统基于规则和既定逻辑的ACC决策与控制算法[9-18],2)基于学习的ACC决策与控制算法[19-21]. 具体而言,Milanes 等[9]结合智能比例积分(proportional integral, PI)控制和模糊控制,设计面向城市道路环境的车辆走停巡航控制算法. Ganji 等[10]利用粒子群算法优化PID控制器参数,提升车辆纵向自动控制效果. Kim 等[11]通过真实驾驶员测试数据设计模型自由巡航控制算法,避免了传统ACC控制算法参数较多的问题,提高了系统安全性和驾驶舒适性. 王斌等[12]综合2类模糊算法,提出可变输出论域的模糊控制方法,实现对车辆纵向自动控制。Furda等[19]考虑交通规则限制、安全性、舒适性等指标,采用 Petri 网设计用于车辆自主行为选择的最优决策体系. Chong等[20]针对车辆跟驰行为,采用模糊逻辑划分交通状态变量,建立基于规则的神经网络模型模拟驾驶员的驾驶行为. 郑睿[21]针对车辆驾驶行为的多目标问题,提出基于最小二乘策略迭代的多目标增强学习的车辆智能驾驶决策方法.
由此可见,第1种ACC着重下层控制,重点讨论控制算法设计、模型非线性及干扰抑制等问题;第2种ACC着重上层决策,重点讨论仿人类大脑驾驶决策过程及其优化. 虽然第1种ACC系统解决了大部分跟车问题,但模型参数往往相对固化. 在现实环境中,车辆的非线性动力学特性和未知环境干扰,使第1种ACC很难实现高精度的鲁棒自适应巡航控制. 第2种ACC虽然可以实现对未知环境的理解,但存在结构复杂、约束条件难以界定以及难以直接实现下层控制的问题. 相比于独立研究,利用迭代学习技术优化传统控制方法,可以有效提升ACC系统的跟踪效果、非线性抑制能力及鲁棒性.
本研究利用反步技术,将车辆距离控制转化为速度控制、解耦间距及速度控制;构建基于数据的耦合滑模面处理车辆复杂的非线性动力学特性、外部干扰及解耦误差;利用反馈控制及鲁棒控制技术设计ACC鲁棒控制算法.
1. 系统描述
1.1. 车辆动力学模型
名义下的车辆动力学方程通常描述为
式中:
考虑运行干扰,车辆真实的动力学模型为
式中:
采用泰勒展开,车辆的真实动力学模型为
式中:
注1 对于车辆而言,其输入输出受能量及执行器限制. 因此,式(3)满足Lipschitz条件,即,
1.2. 自适应巡航控制目标
自适应巡航控制系统根据前车运行速度自适应调整自身速度,以保持期望车距. 目前采用的间距策略主要为1)固定间距策略(constant space, CS):
2)固定时间间距策略(constant time headway, CTH):
3)变时间间距策略(variable time headway, VTH):
为了实现期望间距,定义跟踪误差:
式中:
注2 固定间距策略简单,易于控制器设计,但不符合真实行驶需求. 固定时间与变时间间距策略更贴合驾驶员需求,但其间距策略与速度相关,车辆速度控制与间距控制存在耦合关系,不利于控制器设计,本研究拟提出通用的间距控制算法.
注3 车辆质量
2. 自适应巡航控制算法设计
2.1. 车辆跟踪误差定义
由式(3)、(7)可知:
利用反步法,设计虚拟控制器
设计虚拟控制器
式中:
式中:
利用式(10)将期望间距转化为速度跟踪误差,可知:
因此,本研究的控制目标:设计仅依赖输入输出数据,且鲁棒性较强的控制器
式(13)可以保证位置误差
注4 无论采用何种间距策略,离散误差固有存在于控制器的设计过程中,因此,采样间隔
2.2. 数据驱动的耦合滑模面设计
为了实现控制目标,设计耦合滑模面加速收敛,减少超调,提升控制鲁棒性和乘坐舒适性. 具体形式为
式中:
由于精确的车辆模型信息未知,无法利用传统的滑模控制设计控制器. 考虑注1中指出的车辆模型特性,设计数据驱动的耦合滑模面.
定理1 针对未知车辆运行阻力的式(3),考虑注1中的车辆特性,存在伪梯度
式中:
证明: 将式(12)带入式(14)可得
式中:
由于非线性函数
1)
式中:
2)
其中
定义
证毕.
为了提升控制器的解耦能力,统一考虑各种干扰,将式(15)进一步转化为
式中:
利用数据驱动策略,扩展状态观测器及干扰抑制技术,式(18)中的变量可通过自适应律获得.
引理1 对于构建的滑模面,其未知变量
式中:
证明:上述自适应律可采用文献[23]中的方法获得,具体过程请参考相关文献.
2.3. 鲁棒反步自适应巡航控制算法设计
将车辆间距跟踪控制问题转化为滑模面的控制问题,具体为设计基于输入、输出数据的鲁棒控制器,使得:
本研究设计的基于数据驱动的鲁棒控制律为
设计的控制器包含3个部分:PI控制项
反馈控制项
鲁棒控制项
式中:
注5 由式(26)~(28)可知,所提算法仅需要车辆输入、输出数据,即车辆的位置及速度信息,算法简洁,无需精确的车辆模型,因此所设计的算法为数据驱动的方法.
3. 仿真验证
图 1
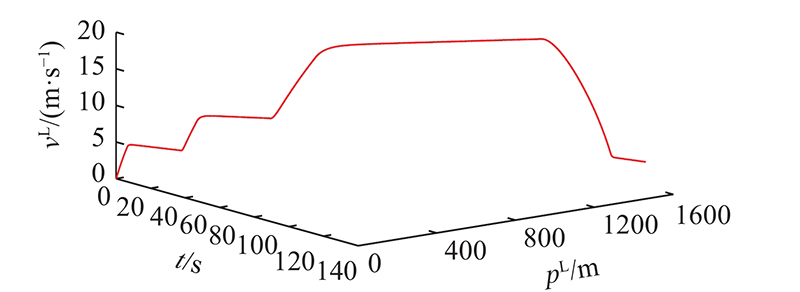
表 1 车辆模型基本参数
Tab.1
| 参数 | 数值 | 参数 | 数值 | |
| | 1250+250 sin (t) | | 1.225 8 | |
| | 2.2 | | 5 | |
| | 0.018+0.002 sin (t) | | 1 | |
| | 0.35+0.05 sin (t) | | 9.8 |
3.1. 数据驱动的鲁棒反步ACC算法验证
分别利用本研究设计的ACC算法及基于PI的ACC算法进行车辆自适应巡航跟踪,并分别选取CTH、VTH策略进行对比研究. 旨在通过实验结果说明:本研究算法在不确定性抑制及对不同间距策略下产生的干扰抑制,控制精度和强鲁棒性.
3.1.1. 固定时间间隔策略下的仿真实验
取车辆的期望间距参数为
3.1.2. 变时间间隔策略下的仿真实验
取车辆的期望间距参数为
3.1.3. 综合分析
如图2、3所示分别为采用本研究设计的ACC算法和基于PI的ACC算法在采取CTH、VTH间距策略下的车辆控制仿真结果. 从图2 (a)、3 (a)中可以看出,本研究设计的ACC算法和基于PI的ACC算法均能以期望间距跟踪前车. 从图2 (a)、3 (a)局部放大图可以看出,本研究算法可以精准的保持期望的间距,基于PI的ACC算法与期望的间距存在误差,本研究算法具有更好的跟踪性能. 从图2 (b)、3 (b)中可以看出,2种算法均可以跟踪前车,在加速或者减速阶段,因为需要改变车辆间距,所以本车必然与前车存在速度误差以实现间距调节. 表2给出了控制算法的跟踪精准性及控制舒适性评价结果. 表中,
图 2
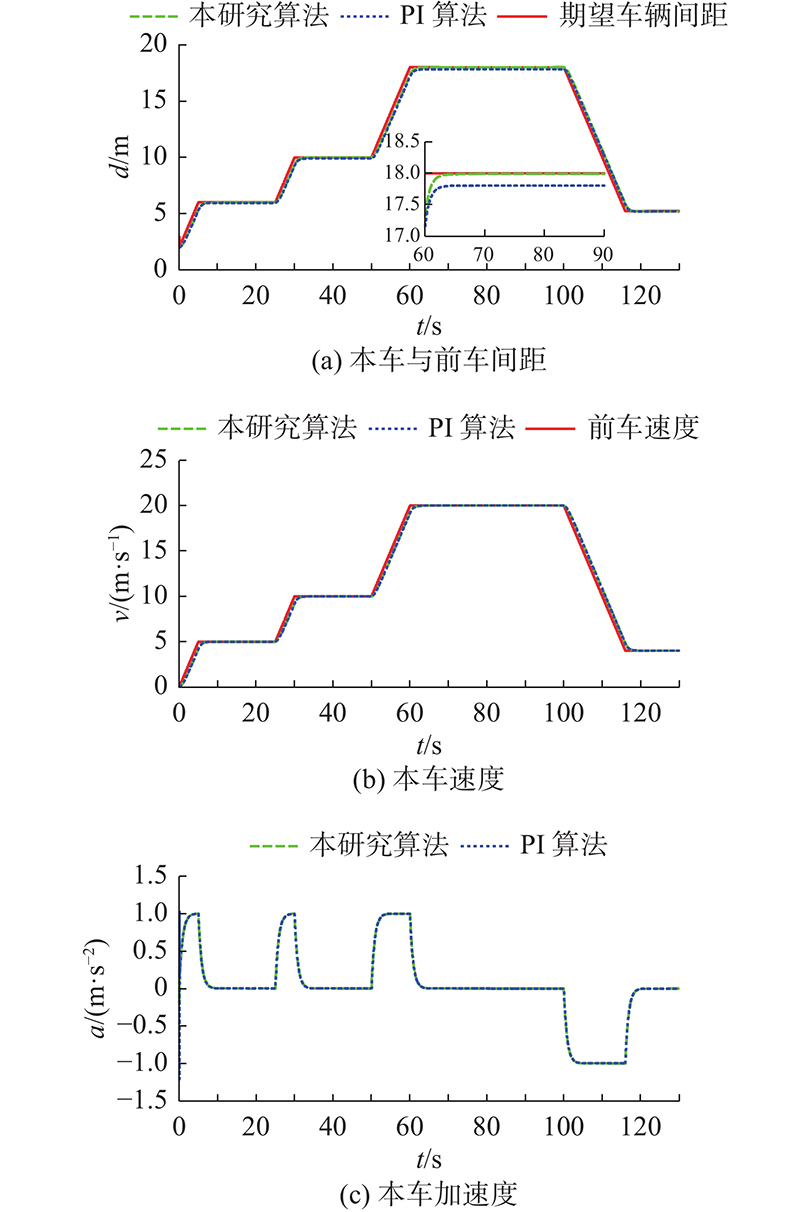
图 3
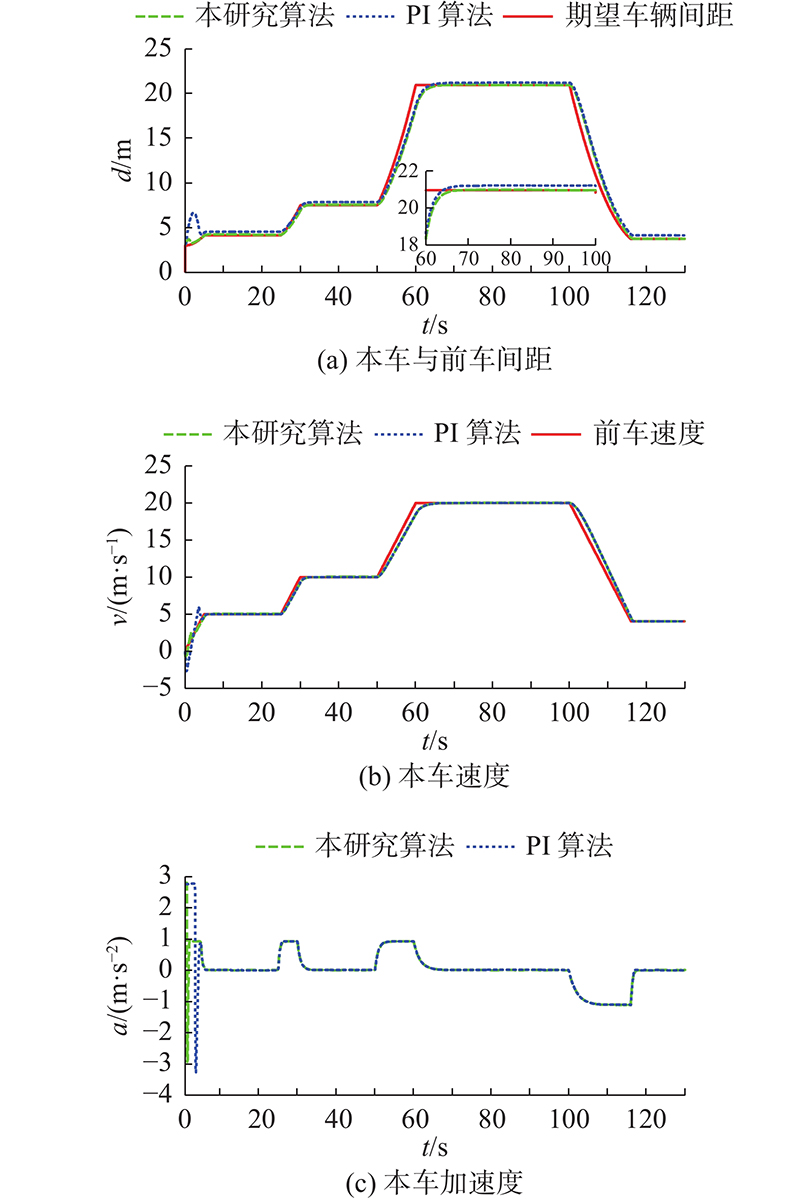
表 2 控制跟踪误差、速度变化率及加速度变化率
Tab.2
| 算法 | CTH | VTH | |||||
| | | | | | | ||
| PI | 0.2 | 3.076 9 | 0.106 7 | 0.25 | 3.076 9 | 0.294 7 | |
| 本研究 | 0.015 | 3.076 9 | 0.068 4 | 0.06 | 3.076 8 | 0.293 1 | |
综上所述,本研究算法可以实现车辆在时变运行阻力下以CTH或VTH多种间距策略稳定、舒适巡航运行,具有较强的鲁棒性.
3.2. 采样时间对算法的影响分析
为了验证离散误差对2种控制算法的影响,取
3.2.1. 固定时间间隔策略下的仿真实验
基于数据驱动的鲁棒反步ACC算法的参数取为
3.2.2. 变时间间隔策略下的仿真实验
所设计的基于数据驱动的鲁棒反步ACC算法参数取为
3.2.3. 综合分析
如图4、 5所示分别为当采样间隔
图 4
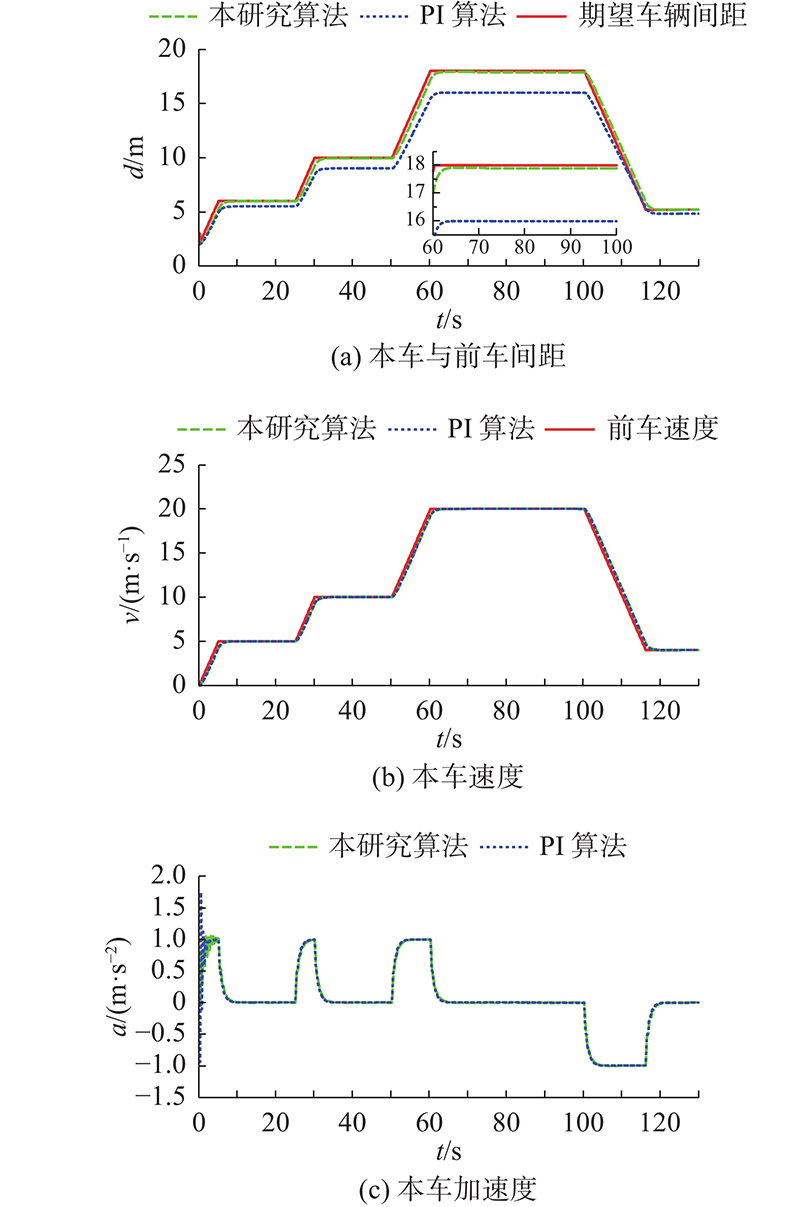
图 4 采样时间为0.1时固定时间间距策略下的仿真结果
Fig.4 Simulation results of constant time headway with 0.1 sample time
图 5
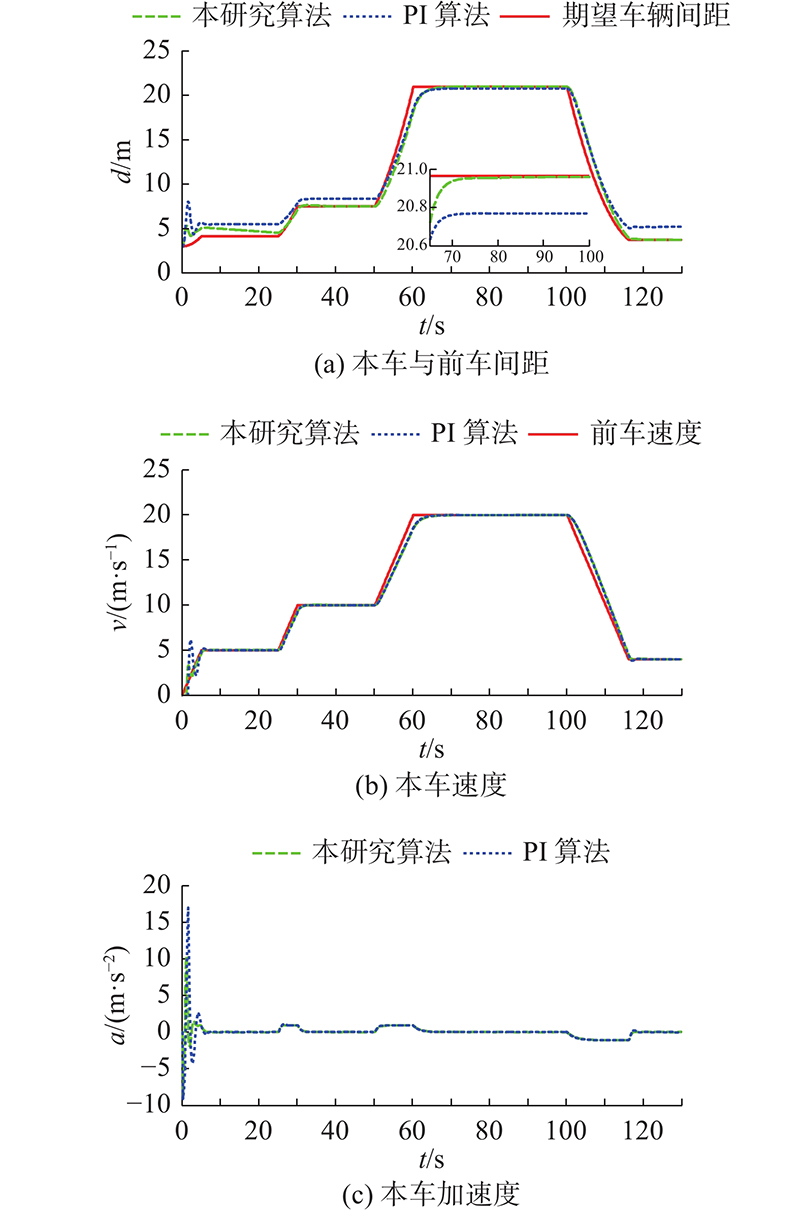
图 5 采样时间为0.1时变时间间距策略下的仿真结果
Fig.5 Simulation results of variable time headway with 0.1 sample time
3.3. 典型ACC工况测试
在3.1.1的基础上测试本研究算法在车辆切入、目标车驶离工况的控制作用.
3.3.1. 车辆切入仿真实验
设计车辆在运行到100 s时,有汽车切入到本车与目标车辆间,切入后本车与前车的间距瞬间变为8 m,验证所设计的算法能否安全调节为期望的间距. 基于数据驱动的鲁棒反步ACC算法参数取为
3.3.2. 目标车辆驶离仿真实验
车辆在运行到100 s时,目标车辆驶离车道,驶离后本车与前车的间距瞬间变为33 m. 其他控制参数同3.3.1.
3.3.3. 综合分析
图 6
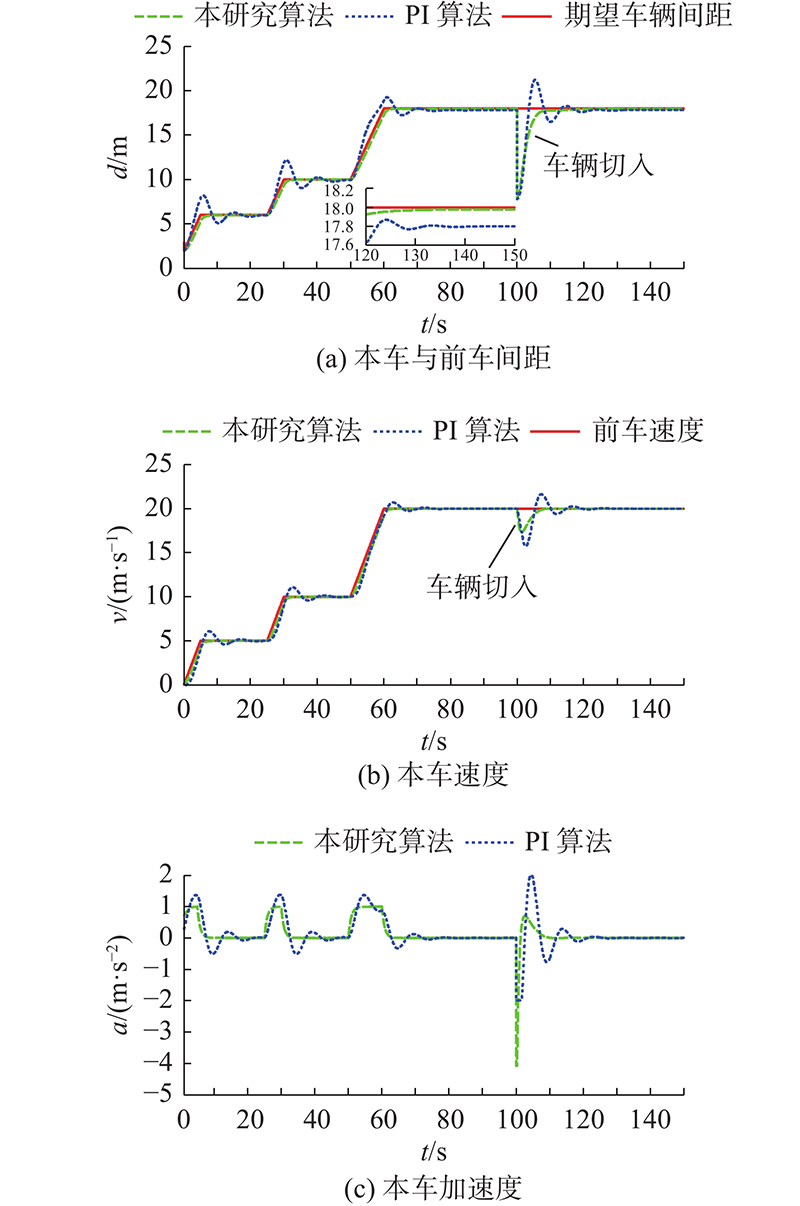
图 7
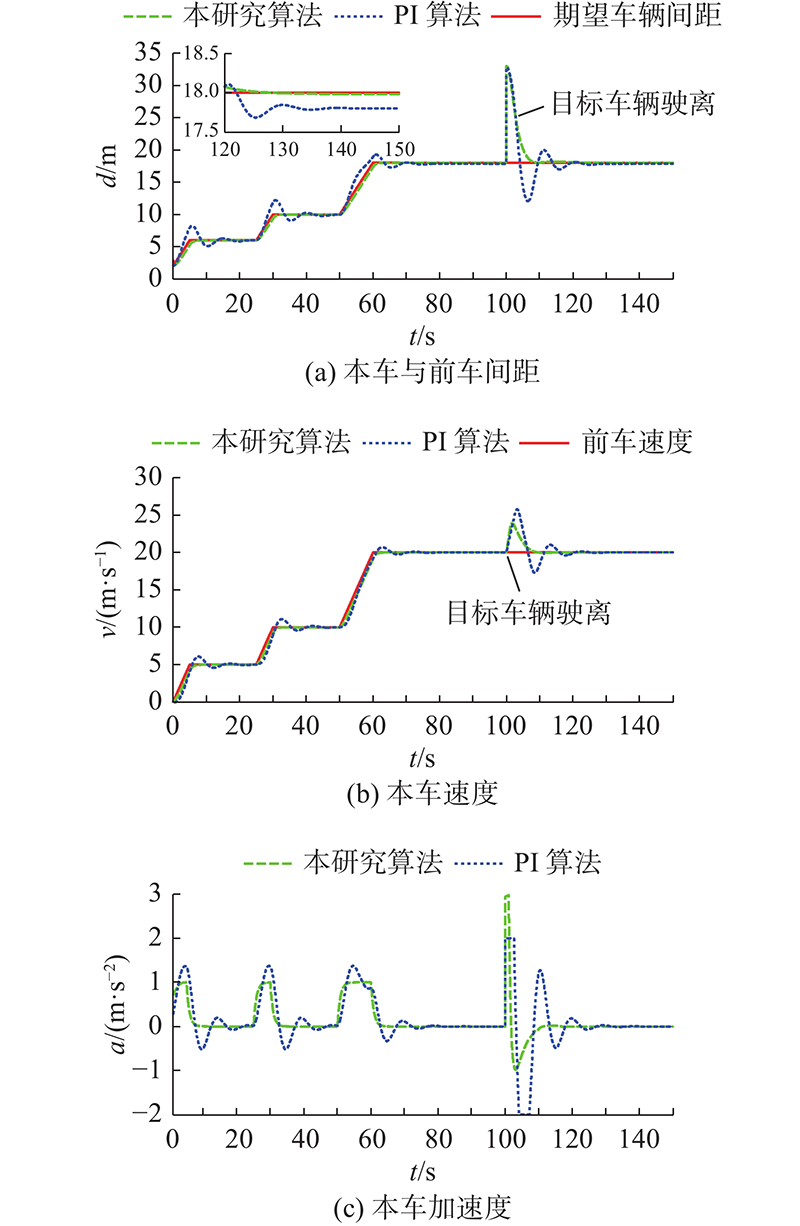
综合上述实验可知,本研究算法可以实现在0.01 s、0.1 s采样间隔下对CTH、VTH不同间距目标的精准控制. 说明本研究算法具有对未知的车辆非线性运行阻力、系统干扰、不同间距策略干扰、采样时间因素的抑制作用. 当出现车辆切入、目标车驶离工况时,设计的算法可以保证车辆间距安全平缓的调节到期望间距. 进一步说明本研究算法的强鲁棒性,可以保证车辆在各种工况下的安全运行.
4. 结 论
(1)提出仅基于车辆输入、输出数据的鲁棒反步自适应巡航控制算法。该算法简洁,无需精确的车辆模型,具有对前车准确跟踪的能力和较强的鲁棒性.
(2)本研究设计的ACC算法可对CTH、VTH不同间距目标实现精准控制. 在理论上,任何速度相关型期望车辆间距或可表达的车辆间距,本研究算法均可实现精准控制.
(3)所设计的算法可有效补偿低采样频率产生的离散误差,当采样时间为0.01、0.1 s时,均可实现对车辆稳定精准跟踪控制.
(4)本研究算法可应用于机器人、无人机、无人船等多种难以精确建模,控制目标与多个状态相关的非线性系统. 未来计划在本研究的控制框架下展开执行器容错,状态不测的ACC控制及智能网联汽车队列控制研究,以及Matlab与Carsim、Amesim、Advisor和Carla等汽车专用仿真软件的联合仿真分析测试.
参考文献
汽车自适应巡航控制系统研究现状与发展趋势
[J].
Research status and development trend of vehicle adaptive cruise control systems
[J].
自适应巡航控制车辆跟驰模型综述
[J].DOI:10.3969/j.issn.1671-1637.2017.03.013
Review of car-following models of adaptive cruise control
[J].DOI:10.3969/j.issn.1671-1637.2017.03.013
基于个性化间距策略的自适应巡航系统模式切换策略研究
[J].
Research on multi-mode switching strategy of adaptive cruise control system based on personalized spacing strategy
[J].
面向再生制动优化的电动车自适应巡航控制策略
[J].
Research on adaptive cruise control strategy for electric vehicle based on optimization of regenerative braking
[J].
考虑驾驶员行驶特性的双模式自适应巡航控制设计
[J].
Two-mode adaptive cruise control design with humans’ driving habits consideration
[J].
Autonomous intelligent cruise control
[J].DOI:10.1109/25.260745 [本文引用: 1]
Comparing fuzzy and intelligent PI controllers in stop-and-go manoeuvres
[J].DOI:10.1109/TCST.2011.2135859 [本文引用: 2]
Adaptive cruise control of a HEV using sliding mode control
[J].DOI:10.1016/j.eswa.2013.07.085 [本文引用: 1]
Design of a model reference cruise control algorithm
[J].DOI:10.4271/2012-01-0492 [本文引用: 1]
汽车ACC系统可变输出论域模糊控制算法
[J].DOI:10.3969/j.issn.1001-3695.2010.02.016 [本文引用: 1]
Fuzzy control algorithm on variable output domain in automotive ACC system
[J].DOI:10.3969/j.issn.1001-3695.2010.02.016 [本文引用: 1]
起-停车辆巡航系统的建模与仿真
[J].DOI:10.3321/j.issn:1001-7372.2007.03.021
Modeling and simulation of stop-and-go vehicle cruise system
[J].DOI:10.3321/j.issn:1001-7372.2007.03.021
MPC实用化问题处理及在车辆ACC中的应用
[J].
Processing of MPC practical problems and its application to vehicular adaptive cruise control systems
[J].
A modular CACC system integration and design
[J].
Cooperative driving with a heavy-duty truck in mixed traffic: experimental results
[J].
Cooperative adaptive cruise control implementation of Team Mekar at the grand cooperative driving challenge
[J].
Enabling safe autonomous driving in real-world city traffic using multiple criteria decision making
[J].DOI:10.1109/MITS.2011.940472 [本文引用: 2]
A rule-based neural network approach to model driver naturalistic behavior in traffic
[J].
Lazy-learning-based data-driven model-free adaptive predictive control for a class of discrete-time nonlinear systems
[J].DOI:10.1109/TNNLS.2016.2561702 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}