基于数据驱动的鲁棒反步自适应巡航控制
Robust backstepping adaptive cruise control based on data-driven
基于数据驱动的鲁棒反步自适应巡航控制 |
| 宋家成,闫茂德,杨盼盼,巨永锋,岳靖斐 |
|
Robust backstepping adaptive cruise control based on data-driven |
| Jia-cheng SONG,Mao-de YAN,Pan-pan YANG,Yong-feng JU,Jing-fei YUE |
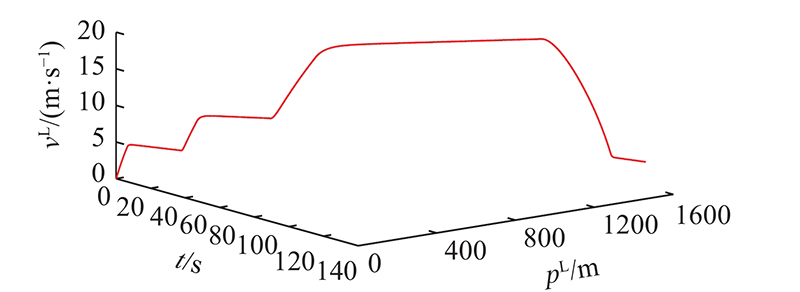
| 图 1 领航车辆的时间–速度–位置轨迹图 |
| Fig.1 Lead vehicle’s time-velocity-position profile |
|
|