|
|
|
| Optimal energy consumption control method for mixed vehicle platoon considering passenger comfort |
Yun MENG( ),Penghui MIAO,Maode YAN*(),Lei ZUO ),Penghui MIAO,Maode YAN*(),Lei ZUO |
| School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China |
|
|
|
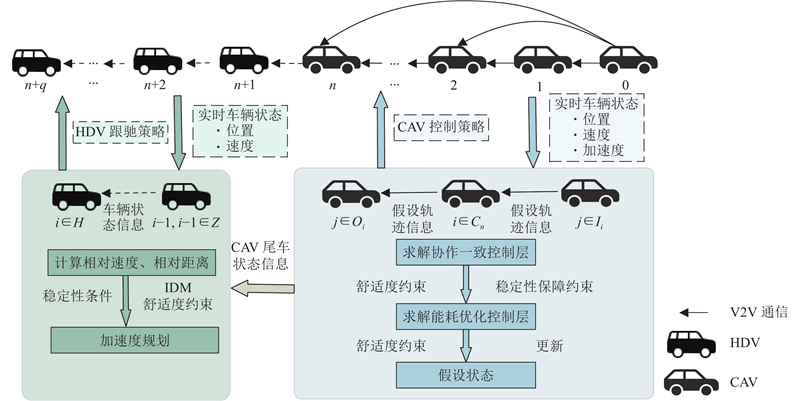
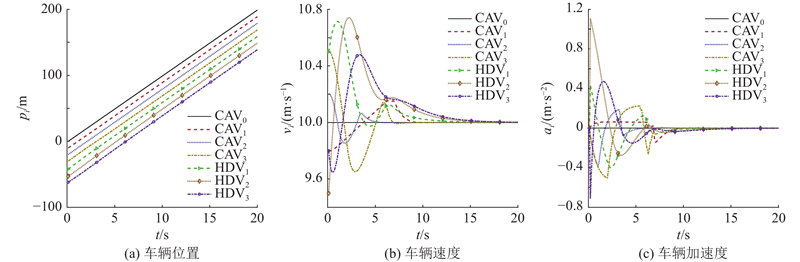
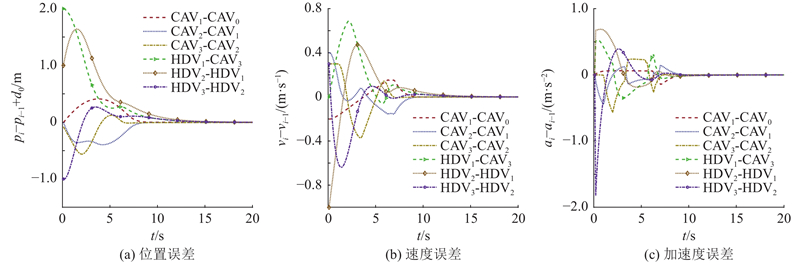
Abstract To address the energy consumption optimization problem in cooperative control of mixed vehicle platoon while ensuring passenger comfort, a collaborative control method combining real-time optimization with distributed model predictive control and an intelligent driver model was proposed. For connected autonomous vehicles in the platoon, passenger comfort constraints were established. Utilizing a precise fuel consumption model, a real-time optimized distributed model predictive control method was designed to reduce real-time energy consumption while ensuring the consistency and stability of the platoon. For human-driven vehicles in the platoon, an intelligent driver-following model that ensures passenger comfort and low energy consumption was adopted. The following stability condition was then derived. Simulation experiments were conducted in the scenarios of constant speed and variable speed leader vehicles to verify the tracking performance of the proposed control method under the constraints of passenger comfort. The average engine power from the initial state to the steady state was used as the energy consumption optimization index, and multiple sets of comparative simulation experiments were conducted. Simulation results show that, compared with the comparative algorithm, the proposed control method can effectively reduce the energy consumption of the mixed vehicle platoon.
|
|
Received: 04 September 2024
Published: 27 October 2025
|
|
|
| Fund: 国家自然科学基金资助项目(52372406);国家重点研发计划资助项目(2020YFB1600400);陕西省重点研发计划项目(2023-YBGY-212). |
|
Corresponding Authors:
Maode YAN
E-mail: mengyun@chd.edu.cn;mdyan@chd.edu.cn
|
考虑乘客舒适度的混合车辆队列最优能耗控制方法
为了解决混合车辆队列协作控制中的能耗优化问题,同时保障乘客舒适度,提出实时优化的分布式模型预测控制与智能驾驶员模型结合的协作控制方法. 针对队列中的网联自动驾驶车辆,建立乘客舒适度约束,使用精确的油耗模型建立实时优化的分布式模型预测控制方法,在确保队列一致稳定的基础上降低实时能耗. 针对队列中的人工驾驶车辆,采用乘客舒适度和能耗性能良好的智能驾驶员跟驰模型描述跟驰行为,推理分析得到跟驰稳定性条件. 分别在恒速与变速领航车辆场景下开展仿真实验,验证所提控制方法在满足乘客舒适度约束条件下的跟踪性能. 以从初始状态到稳态的平均发动机功率为能耗优化指标,进行多组对比仿真实验,结果表明,相比对比算法,所提控制方法能够有效降低混合车辆队列的能耗.
关键词:
混合车辆队列,
能耗优化,
乘客舒适度,
分布式模型预测控制,
网联自动驾驶车辆,
人工驾驶车辆
|
|
| [1] |
CAO D, WANG X, LI L, et al Future directions of intelligent vehicles: potentials, possibilities, and perspectives[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7 (1): 7- 10
doi: 10.1109/TIV.2022.3157049
|
|
|
| [2] |
CHEN K, HE S, XU E, et al Ride comfort analysis and multivariable co-optimization of the commercial vehicle based on an improved nonlinear model[J]. IEEE Access, 2019, 8: 2732- 2749
|
|
|
| [3] |
ZHAI C, LIU Y, LUO F A switched control strategy of heterogeneous vehicle platoon for multiple objectives with state constraints[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20 (5): 1883- 1896
|
|
|
| [4] |
CHEN J, TAO S, TENG S, et al Expression of concern for: toward sustainable intelligent transportation systems in 2050: fairness and eco-responsibility[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (6): 3537- 3540
doi: 10.1109/TIV.2023.3286873
|
|
|
| [5] |
LUO J, HE D, ZHU W, et al Multiobjective platooning of connected and automated vehicles using distributed economic model predictive control[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 19121- 19135
doi: 10.1109/TITS.2022.3170977
|
|
|
| [6] |
边有钢, 杨依琳, 胡满江, 等 基于双向多车跟随式拓扑的混合车辆队列稳定性研究[J]. 中国公路学报, 2022, 35 (3): 66- 77
BIAN Yougang, YANG Yilin, HU Manjiang, et al Study on the stability of mixed vehicular platoon based on bidirectional multiple-vehicle following topologies[J]. China Journal of Highway and Transport, 2022, 35 (3): 66- 77
doi: 10.3969/j.issn.1001-7372.2022.03.007
|
|
|
| [7] |
李淑庆, 李啟丰, 王昊, 等 协作式巡航控制下混合车队队列稳定性[J]. 交通运输系统工程与信息, 2021, 21 (4): 82- 89
LI Shuqing, LI Qifeng, WANG Hao, et al String stability of mixed platoon under cooperative adaptive cruise control[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21 (4): 82- 89
|
|
|
| [8] |
ZHAN J, MA Z, ZHANG L Data-driven modeling and distributed predictive control of mixed vehicle platoons[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (1): 572- 582
doi: 10.1109/TIV.2022.3168591
|
|
|
| [9] |
HU Y, CHEN C, HE J, et al Eco-platooning for cooperative automated vehicles under mixed traffic flow[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22 (4): 2023- 2034
doi: 10.1109/TITS.2021.3056122
|
|
|
| [10] |
YAO Z, WANG Y, LIU B, et al Fuel consumption and transportation emissions evaluation of mixed traffic flow with connected automated vehicles and human-driven vehicles on expressway[J]. Energy, 2021, 230: 120766
doi: 10.1016/j.energy.2021.120766
|
|
|
| [11] |
ZHAO W, NGODUY D, SHEPHERD S, et al A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 802- 821
doi: 10.1016/j.trc.2018.05.025
|
|
|
| [12] |
SHAO Y, SUN Z. Robust eco-cooperative adaptive cruise control with gear shifting [C]// Proceedings of the American Control Conference. Seattle: IEEE, 2017: 4958–4963.
|
|
|
| [13] |
秦严严, 王昊, 王炜, 等 混有CACC车辆和ACC车辆的混合交通流驾驶舒适性[J]. 哈尔滨工业大学学报, 2017, 49 (9): 103- 108
QIN Yanyan, WANG Hao, WANG Wei, et al Driving comfort of traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. Journal of Harbin Institute of Technology, 2017, 49 (9): 103- 108
|
|
|
| [14] |
LI F, WANG Y Cooperative adaptive cruise control for string stable mixed traffic: benchmark and human-centered design[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18 (12): 3473- 3485
doi: 10.1109/TITS.2017.2760805
|
|
|
| [15] |
TIAN D, ZHANG P, ZHOU J, et al. Optimal control of mixed platoons with autonomous and human-driven vehicles [C]// Proceedings of the IEEE International Conference on Unmanned Systems. Beijing: IEEE, 2021: 122–127.
|
|
|
| [16] |
ZHENG Y, EBEN LI S, WANG J, et al Stability and scalability of homogeneous vehicular platoon: study on the influence of information flow topologies[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17 (1): 14- 26
doi: 10.1109/TITS.2015.2402153
|
|
|
| [17] |
XIAO L, GAO F Practical string stability of platoon of adaptive cruise control vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12 (4): 1184- 1194
doi: 10.1109/TITS.2011.2143407
|
|
|
| [18] |
RAKHA H A, AHN K, MORAN K, et al Virginia tech comprehensive power-based fuel consumption model: model development and testing[J]. Transportation Research Part D: Transport and Environment, 2011, 16 (7): 492- 503
doi: 10.1016/j.trd.2011.05.008
|
|
|
| [19] |
MU Z, JAHEDINIA F, PARK B. Does the intelligent driver model adequately represent human drivers? [C]// Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems. Prague: Science and Technology Publications, 2023: 113–121.
|
|
|
| [20] |
BIAN Y, DU C, HU M, et al Fuel economy optimization for platooning vehicle swarms via distributed economic model predictive control[J]. IEEE Transactions on Automation Science and Engineering, 2021, 19 (4): 2711- 2723
|
|
|
| [21] |
LI Z, LI W, XU S, et al Stability analysis of an extended intelligent driver model and its simulations under open boundary condition[J]. Physica A: Statistical Mechanics and Its Applications, 2015, 419: 526- 536
doi: 10.1016/j.physa.2014.10.063
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|